Изобретение относится к методам обработки полученной радиолокационным способом информации и может быть использовано в когерентно-импульсных радиолокационных станциях (РЛС) сопровождения для селекции воздушных объектов (ВО), имитирующих радиолокационные характеристики (РЛХ) воздушных объектов, то есть имитаторов вторичного излучения (ИВИ).
Под РЛХ понимается совокупность всех характеристик, описывающих связи между одноименными параметрами (энергетическими, фазовыми, частотными, поляризационными и т.д.) облучающего и отраженного сигналов с учетом пространственно-временного положения ВО [1]. При всем своем многообразии РЛХ бывают статические и динамические. Например, к статической РЛХ относиться диаграмма обратного вторичного излучения (ДОВИ) ВО, описывающая зависимость изменения амплитуды (энергии) отраженных сигналов от угла поворота ВО относительно РЛС на фиксированной дальности, к динамической -отражательная характеристика (ОХ) ВО, показывающую зависимость изменения амплитуды (энергии) отраженных сигналов при движении ВО относительно РЛС. Значение ДОВИ для фиксированного угла локации определяет величину эффективной площади рассеяния (ЭПР) ВО, которая зависит от ракурса. Использование ЭПР в качестве признака классификации ВО обусловлено тем, что ее значение зависит от электромагнитных свойств ВО, соотношения между его линейными размерами и длиной волны, конфигурации ВО и его ориентации относительно РЛС. Непредсказуемость ОХ ВО связана нелинейностью изменения ракурса ВО при рысканиях его планера в турбулентной атмосфере. Указанная непредсказуемость обусловливает возможность и удобство имитации ОХ реальных ВО с помощью цифровой обработки и преобразования зондирующего сигн-ла, проникающего в приемный тракт имитатора-переизлучателя, т.е. ИВИ.
Известен способ селекции истинных ВО на фоне ИВИ [2] по характеру изменения их ЭПР. Он основан на измерении ЭПР объекта [3]. Суть способа заключается в том, что излучают зондирующие сигналы в направлении сопровождаемого ВО, по мере отражения от него запоминают в течение некоторого времени Δt амплитуды отраженных сигналов. По запомненным амплитудам отраженных сигналов формируют ОХ ВО [1-6]. Затем анализируют сформированную ОХ ВО. При этом задаются определенной величиной изменения уровня отраженного сигнала от ВО ΔU и измеряют величину изменения ракурса локации ВО Δγ, приводящего к заданному изменению амплитуды отраженного сигнала ΔU. Далее сравнивают измеренную величину Δγ изменения ракурса локации с заранее установленным пороговым значением Δγпор. В случае превышения порога принимают решение о том, что объектом отражения радиоволн является ИВИ.
Выбор признака селекции ИВИ Δγ авторы [2] проводили с учетом того, что при пеленге объекта простейшей формы (шар, линза, уголковая конструкция) или малых размеров амплитуда отраженных сигналов слабо зависит от изменения величины ракурса локации. Например, для имитации больших значений ЭПР ВО, что присуще геометрически протяженным объектам, ранее часто использовались ИВИ типа линзы Люнеберга или уголкового отражателя [3]. ЭПР этих объектов может достигать больших величин при малых геометрических размерах. Однако существенного изменения амплитуды отраженного сигнала от этих ИВИ при изменении ракурса локации не происходит.
Если объект сложный (например, самолет), то с изменением ракурса амплитуда отраженного сигнала существенно изменяется [3]. Даже весьма малые изменения ракурса порядка единиц или долей градусов приводят к значительным (в разы) изменениям амплитуды отраженного сигнала. Непредсказуемые вариации амплитуды отраженных сигналов называют флюктуациями. Для регистрации таких флюктуаций ВО должен сопровождаться радиолокатором в течение некоторого интервала времени Δt, что дает возможность проследить за изменением амплитуды сигналов в зависимости от изменения ракурса локации ВО.
Недостатком данного способа является то, что современные ИВИ типа MALD [7-9] имеют возможность не только переотражать принятые зондирующие сигналы, но также усиливать их до уровня, соответствующего ЭПР ВО сложной конфигурации (СК), имитируя процесс изменения амплитуды отраженного от ВО сигнала с помощью амплитудной модуляции. Непредсказуемость амплитудной модуляции позволила разработать имитатор отражений импульсных зондирующих сигналов от сложного сосредоточенного (многоточечного) ВО в квазиоптической области отражения, который является основным элементом ИВИ типа MALD. Амплитудная модуляция отраженного сигнала при изменении ракурса локации является характерным признаком ВО, имеющего сложную геометрическую конфигурацию. Оснащенный переотражающим имитатором-модулятором ИВИ типа MALD, имеющий малую стоимость, способен имитировать амплитудные флюктуации сигналов, отраженных ВО СК. В результате ИВИ по признаку изрезанности ОХ не будет отличаться от ВО СК. Значит, признак селекции, используемый в [2], в отношении ИВИ типа MALD и ему подобных оказывается неработоспособным.
Известен и другой способ селекции ИВИ [10], заключающийся в том, что две синхронизированные по времени радиолокационные станции РЛС1 и РЛС2 одновременно облучают выбранный для распознавания ВО импульсными высокочастотными сигналами сантиметрового диапазона. Для развязки излучений несущие частоты основной РЛС1 и дополнительной РЛС2 радиолокационных станций должны отличаться на величину порядка 70 кГц. Указанные РЛС предлагается размещать на расстоянии d, не превышающем 2 км в направлении перпендикулярном основному направлению ожидаемого подлета ВО или ИВИ. Периоды повторения Ти импульсов РЛС1 и РЛС2 выбирают одинаковыми. Осуществляют обоими РЛС автоматическое сопровождение воздушного объекта поугловым координатам и дальности, определяют значения угловых координат и дальности в каждый момент времени. С переходом на автосопровождение выбранного для распознавания ВО отраженные от него сигналы после приема переводятся с помощью аналого-цифрового преобразователя (АЦП) в цифровую форму и запоминаются в оперативных запоминающих устройствах (ОЗУ) соответствующих РЛС. Запоминанию подлежат амплитуда и точное время приема каждого отраженного импульса. Для запоминания точного времени приема п-го импульсного сигнала целесообразно использовать формулу tn=nΤи, где n - номер отраженного импульса. Запоминание проводится в течение временного интервала Δt, одинакового для обоих РЛС. Выбор временного интервала Δt проводят с учетом реальных значений полупериодов рысканий ВО при его полете в турбулентной атмосфере [11]. Интервал Δt должен быть не менее 4 секунд.
Из запомненных амплитуд и значений времени приема каждого импульса в ОЗУ РЛС1 создается двумерный массив данных M1, а в ОЗУ РЛС2 - двумерный массив данных М2. Каждый из этих массивов будет выражать собой ОХ ВО.
Для устранения составляющих, связанных с проявлениями турбовинтового эффекта (ТВЭ), проводится сглаживание (низкочастотная фильтрация) значений амплитуд отраженных сигналов, записанных в массивы M1, М2 [12-14].
Конкретно, для сглаживания данных, выражающих амплитуды принятых сигналов, из массива Ml выбирают первые 32 элемента от U1M1 до U32M1, находят их среднее арифметическое и записывают его значение Ucp1M1 в первый элемент массива M1. Затем извлекают значения элементов массива M1 со 2-го (U2M1) по 33-й (U33M1), находят их среднее арифметическое и записывают его значение Ucp2M1 во вторую ячейку массива M1. Описанную операцию повторяют до тех пор, пока не будет использована последняя совокупность из 32-х значений элементов массива с (N-31)-го (U(N-31)M1) по N-й (UNM1). Их среднее арифметическое Ucp(N-31)M1 записывают в элемент массива M1 с номером (N-31). Остальные элементы массива M1 с (N-30)-го по N-й остаются неизменными или обнуляются и в дальнейших операциях не участвуют.
Аналогичным образом проводят сглаживание данных в массиве М2. В результате такого сглаживания данные массивов M1 и М2 (за исключение последних 31 члена) будут выражать собой низкочастотную планерную ОХ ВО, вид которой определяется отражением волн от элементов конструкции планера ВО. В таком виде планерная ОХ ВО пригодна для селекции ИВИ.
Для проведения дальнейших операций число элементов массивов M1 и М2 уменьшают на 31, удаляя последние элементы. Далее для упрощения изложения способа селекции изложенные выше действия будем называть операцией устранения составляющих ТВЭ методом сглаживания.
На первом этапе селекции используются данные массива Ml, сформированного в РЛС1, и предложенный в [2] признак. Это позволяет на основе известного способа селектировать ИВИ типа уголковых отражателей, фольги, линз Люнеберга и им подобных на фоне реальных ВО.
Задавшись определенным уровнем изменения амплитуды отраженного сигнала *U, анализируют сформированный двумерный массив данных M1 и находят интервал времени ΔtΔU, в течение которого амплитуда отраженного сигнала изменяется на величину ΔU. Для этого из массива M1 выбирают элемент с номером j, соответствующий максимальному значению амплитуды отраженного сигнала. Приняв номер элемента j за начало отсчета, последовательно изменяют номер элемента на единицу и находят номер к такого элемента массива, в котором записана амплитуда отраженного сигнала Uk, отличающаяся от амплитуды Uj с номером n на величину ΔU. Далее находят интервал времени, соответствующий изменению амплитуды отраженного сигнала на величину ΔU, по формуле ΔtΔU=Tи|j - k|.
Величину найденного интервала ΔtΔU сравнивают с пороговым значением Δtпор, учитывающим среднюю скорость изменения ракурса локации ВО при рысканиях, составляющую величину порядка 1,5%. В случае превышения величиной ΔtΔU порогового значения Δtnop сразу принимают окончательное решение о наличии ИВИ. В этом случае дальнейшая селекция не требуется.
Однако ИВИ может оказаться имитатором типа MALD [7]. Тогда отраженные сигналы будут интенсивно изменять свою амплитуду за малый интервал времени Δt, имитируя отражательную характеристику реального ВО. В этом случае на первом этапе селекции будет принято предварительное решение о возможном наличии реального ВО.
Для принятия окончательного решения о наличии реального ВО на втором этапе используют двумерные массивы данных M1 и М2, полученные при радиолокационном приеме соответственно в РЛС1 и РЛС2. В основе селекции ИВИ на втором этапе лежит сравнение массивов данных M1 и М2 отраженных от ВО сигналов.
Для сравнения двумерных массивов M1 и М2 оцифрованные данные, выражающие массив М2, передают по средствам связи в РЛС1. Это позволяет цифровой вычислительной машине РЛС1 производить поимпульсное сравнение амплитуд отраженных сигналов, полученных с помощью РЛС1 и РЛС2. Для этого из сглаженного массива M1 извлекается первый элемент Ucp1M1, а из сглаженного массива М2 - первый элемент Ucp1M2. Их значения сравниваются, и вычисляется модуль разности |UCp1M1 - Ucp1M2|. Затем из массивов M1 и М2 извлекаются вторые элементы и вычисляется аналогичная разность |Ucp2M1 - Ucp2M2|. Данная операция повторяется до окончания перебора всех элементов массива. На s-om шаге будет вычисляться величина |UcpsM1 - UcpsM2|. Если число элементов сглаженного массива обозначить через S, то последняя разность модулей выражается формулой |Ucpsm1 - UcpSM2|. Из алгоритма усреднения ясно, что число элементов сглаженного массива S=N-31. Правильное соответствие амплитуд отраженных сигналов по времени обеспечивается синхронизацией РЛС1 и РЛС2, а также записью в массивы совместно с амплитудой каждого сигнала точного времени его прихода. Рассчитанные модули разностей складываются. В результате производится вычисление величины несоответствия ОХ ВО РЛС1 и РЛС2 по формуле
где S - количество элементов в сглаженном массиве M1 (количество элементов в массивах M1 и М2 одинаково, т.к. одинаковыми являются период записи сигналов Δt и период повторения Ти).
Описанный алгоритм нахождения ΔU∑ будем в дальнейшем называть процедурой почленного сравнения элементов массивов и нахождения интегрального несоответствия.
Полученное значение ΔU∑ сравнивают с пороговой величиной ΔUпор. В случае превышения величиной ΔU∑ величины порога ΔUпор принимают окончательное решение о наличии реального ВО. В противном случае принимают окончательное решение о том, что ВО является ложным, т.е. представляет собой ИВИ.
Недостатком способа [10] является то, что он неработоспособен для вариантов ИВИ, формирующих разные ОХ на разных частотах. Кроме того способ не учитывает возможное отличие коэффициентов усиления приемных каналов РЛС1 и РЛС2, которое может привести к значительному расхождению значений элементов массивов M1 и М2 после устранения составляющих ТВЭ методом сглаживания.
Большинство ВО, как правило, имеет сложную конфигурацию, что при облучении их электромагнитными волнами (ЭМВ) с длиной волны меньшей их геометрических размеров приводит к возникновению локальных областей отражения на поверхности ВО. Данные области для упрощения можно представить точечными локальными рассеивающими центрами (РЦ), разнесенными в пространстве. Эти РЦ удалены от РЛС на расстояниям di (где i-номер РЦ), которые зависят от дальности до ВО и его архитектуры. На фиг. 1 показаны РЦ 1, 2 и 3, расположенные на поверхности планера ВО СК 4. Каждый РЦ имеет вполне определенное удаление от РЛС 5, т.е d1 для РЦ 1, d2 для РЦ 2, d3 для РЦ 3.
На фиг. 1 показан процесс сложения составляющих отраженного от РЦ ВО сигнала. В процессе движения ВО относительно РЛС происходит его поворот (вращение) относительно линии визирования и удаление или приближение в зависимости траектории движения, что приводит к изменению задержек составляющих отраженного от РЦ ВО сигнала. Пример изменения задержек сигнала вследствие поворота ВО относительно линии визирования при поступательном движении ВО относительно РЛС для трех РЦ показан на фиг. 2. На нем цифрой 6 обозначено положение рассеивающих центров, соответствующее моменту времени t1, а цифрой 7 - времени t2. Процесс поворота приводит к флюктуациям амплитуд и фаз суммарного отраженного сигнала, закон которых зависит от архитектуры ВО и частоты зондирующего сигнала. Этот закон может имитироваться с помощью ИВИ.
С развитием электроники и вычислительной техники появился ряд подходов к эксклюзивной модуляции сигнала, излученного РЛС и переизлученного ИВИ в интересах имитации ОХ ВО СК.
При первом подходе зондирующий сигнал от РЛС принимается широкополосным приемником ИВИ, усиливается широкополосным усилителем, коэффициент усиления которого изменяется во времени в соответствии с законом вторичного излучения для имитируемого типа ВО, и переизлучается в направлении РЛС. Коэффициент усиления передатчика ИВИ должен быть таким, чтобы минимальный уровень имитируемого отраженного сигнала в несколько раз (на порядок) превосходил реальный отраженный сигнал. При таком подходе ИВИ формирует одинаковые ОХ на всех частотах зондирования.
При втором подходе (фиг. 3) зондирующий сигнал от РЛС 8 принимается антенной 9 ИВИ 16, поступает на приемопередатчик 10, усиливается и распределяется на несколько каналов с помощью делителя 11. Каждый канал включает усилитель 12 и регулируемую линию задержки 13, параметрами которых управляет ЭВМ 14. Сигналы с регулируемых линий задержки 13 поступают на сумматор 15, к выходу которого подключен приемопередатчик 10, передающий сформированный сумматором совокупный имитируемый отраженный сигнал на антенну 9 для излучения в направлении РЛС 8 (фиг. 3). Элементы 9-15 являются составными частями ИВИ 16. Число каналов соответствует количеству имитируемых локальных РЦ для заданного типа ВО. В каждом канале сигнал усиливается (до величины пропорциональной отражающей способности РЦ) и задерживается на интервал времени, соответствующий пространственному расположению РЦ на поверхности планера имитируемого ВО в данный момент времени. Причем задержки сигналов, соответствующие взаимному пространственному расположению РЦ, с течением времени меняются, имитируя поворот ВО относительно РЛС. Это отчетливо прослеживается по фиг. 2, на которой в результате имитации поворота ВО относительно РЛС радиальное удаление i-го РЦ Δdi; изменяется. То есть поворот ВО является причиной изменения радиальных задержек. Причем изменение радиального расстояния для каждого РЦ индивидуально. В каждом периоде зондирования осуществляется сложение усиленных и задержанных сигналов и переизлучение полученного интегрального сигнала в направлении РЛС.
При таком подходе переизлученный сигнал формируется в результате интерференции радиосигналов разных каналов. Сигнал на раскрыве антенны (фиг. 1) равен сумме отраженных от РЦ ВО сигналов, а его амплитуда определяется их фазовыми соотношениями. При этом фазовые соотношения будут зависеть от частоты имитируемого переизлученного сигнала. Чем выше частота, тем быстрее изменяется фаза совокупного отраженного сигнала во времени, и тем интенсивнее будет флюктуировать ОХ.
Следовательно, вид ОХ при такой имитации будет зависеть от частоты зондирующего сигнала. То есть в РЛС с разными несущими частотами при пеленге ИВИ будут получены разные ОХ, что соответствует варианту отражения от реального ВО СК. При выработке окончательного решения в известном способе селекции ИВИ [10] в отношении ИВИ, использующего описанный выше интерференционный алгоритм формирования ОХ, будет принято решение, что наблюдается ВО СК. То есть способ не позволит осуществить правильную селекцию ИВИ.
Еще одним недостатком известного способа является то, что при различии коэффициентов усиления приемных каналов РЛС1 и РЛС2 становится невозможным осуществлять корректное поимпульсное сравнение амплитуд отраженных сигналов в цифровой вычислительной машине. Сравнение приводит к правильному выводу только в том случае, когда коэффициенты усиления приемных каналов РЛС1 и РЛС2 строго идентичны.
Известен и способ селекции имитаторов вторичного излучения воздушных объектов [15], в котором предлагается изменить алгоритм формирования ОХ, а также количество используемых ОХ. Две отражательные характеристики на частотах f1 и f2 предлагается формировать с одного ракурса, а третью ОХ на частоте f1 - с другого ракурса. Под ракурсом понимается направление пеленгации ВО. Отражательные характеристики, формируемые совместно на разных несущих частотах и при различных параметрах локации (на разных ракурсах), обеспечивают при предлагаемом способе однозначное определение факта имитации РЛХ и признаков ВО СК.
Для селекции ИВИ, в данном способе, предлагается использовать РЛС и пассивный приемный модуль (ППМ), включающий антенную систему, приемную систему, настроенную на частоту fi и задерживающую (блокирующую) радиоимпульсы на частоте f2, систему управления антенной, ОЗУ, АЦП, средства связи для приема информации от радиолокационной станции и передачи данных на радиолокационную станцию. Основное отличие НИМ от РЛС заключается в отсутствии передатчика для излучения радиолокационных сигналов в направлении ВО. Основная РЛС осуществляет поиск ВО и взятие его на сопровождение, проводит его отождествление на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики, в части касающейся обнаружения ВО и взятия их на сопровождение. После принятия оператором решения на селекцию ИВИ по соответствующей команде (сигналу) РЛС начинает излучать специальный двухчастотный сигнал (ДС), представляющий собой последовательность радиоимпульсов, в котором несущие частоты в смежных радиоимпульсах отличаются на величину Δf=f1 - f2, где f1 и f2 - несущие частоты смежных радиоимпульсов в последовательности. Экспериментально установлено, что разность частот Δf должна составлять не менее 100 МГц. Для осуществления селекции ИВИ на расстоянии до ВО 100 км радиолокационную станцию и ППМ необходимо удалять друг от друга на расстояние не менее 600 м в направлении перпендикулярном основному направлению ожидаемого подлета ВО или ИВИ. С увеличением (уменьшением) предполагаемого расстояния до ВО взаимное расположение РЛС и НИМ, выбираемое заблаговременно, целесообразно увеличивать (уменьшать).
Для обнаружения селектируемого ВО пассивным приемным модулем и слежения за этим ВО его координаты, измеренные с помощью РЛС, по средствам связи передают из РЛС в НИМ. Пассивный приемный модуль принимает отраженные от ВО на частоте f1 сигналы и осуществляет его пассивное сопровождение по угловым координатам и дальности. В связи с незначительным удалением НИМ от РЛС пересчет координат ВО не требуется. Отраженные ВО сигналы на частоте f2 не проходят через частотно-избирательные цепи НИМ. Селекция осуществляется путем сравнения, во-первых, ОХ ВО в РЛС на частотах f1 и f2, а во-вторых, путем сравнения ОХ ВО, сформированных в РЛС и в НИМ на частоте f1.
Селекция основана на проверке выполнении определенных условий. Решение о наличии ИВИ принимается в случае, если отражательные характеристики на частотах f1 и f2 будут одинаковыми, что означает или наличие в составе ВО всего одного локального РЦ или попытку имитации ВО СК. То есть и в том и другом случае ОХ будут сформированы искусственным путем, а не в результате интерференции радиоволн, отраженных от планера ВО, имеющего несколько пространственно распределенных РЦ. При отражении от ВО СК вследствие разной длины волны зондирующего сигнала на частотах f1 и f2 интерференционное суммирование (суперпозиция) отражений от планера ВО должно приводить к формированию несовпадающих, т.е. разных ОХ.
При отличиях в ОХ на частотах 1l и f2, полученных синхронно в одной РЛС, для выработки верного обоснованного решения на втором этапе сравниваются ОХ, сформированные в РЛС и ППМ на частоте f1. В результате принимается решение о наличии ИВИ, если ОХ, зафиксированные в РЛС и ППМ являются идентичными. Отражательные характеристики ВО СК, сформированные на одинаковой частоте, но с разных ракурсов, не могут совпадать. После подведения итогов последнего сравнения селекция ИВИ заканчивается.
Недостатками предлагаемого способа является невозможность селекции реальных ВО на фоне ложных, формируемых интеллектуальными ИВИ [16], которые при их облучении зондирующим сигналом формируют множество ответных сигналов, с различным усилением и разным временем запаздывания, имитируя ложные ВО на направлении облучения, а так же использование стационарного ППМ на фиксированном расстоянии в предполагаемом направлении полета реального ВО, которое заранее может быть не известно.
Отмеченные недостатки способа [15] следует устранить.
Задачей изобретения является совершенствование известного способа селекции имитаторов вторичного излучения воздушных объектов [15] для придания ему работоспособности при селекции реальных ВО, на фоне ложных, формируемых интеллектуальными ИВИ и не зависящем от их направления полета.
Для решения задачи предлагается установить радиолокатор кругового обзора (РЛКО), представляющий собой кольцевую фазированную антенную решетку (КФАР) и способный работать в пассивном и активном режиме, на мобильное средство передвижения, которое может изменять свое положение в пространстве по высоте, дальности и азимуту, к примеру, на беспилотный летательный аппарат вертолетного типа (БпЛАВТ) обладающий допустимыми летно-техническими характеристиками по массе полезной нагрузке. Причем РЛКО установленный на БпЛАВТ должен излучать и принимать сигналы со всех угловых направлений, и в дальнейшем предложено понимать в качестве него мобильный радиолокатор (МРЛ). В качестве наземной станции разведки предложено использовать РЛКО в виде КФАР и станцию сопровождения воздушных целей (ССЦ), и в дальнейшем понимать в качестве него наземный радиолокатор (НРЛ). При этом МРЛ должен быть ориентирован относительно НРЛ, что приводит к совпадению координат обнаруженных реальных целей МРЛ с координатами обнаруженных реальных целей НРЛ, при нахождении реальных целей в суммарной зоне обнаружения формируемой НРЛ и МРЛ (фиг. 4).
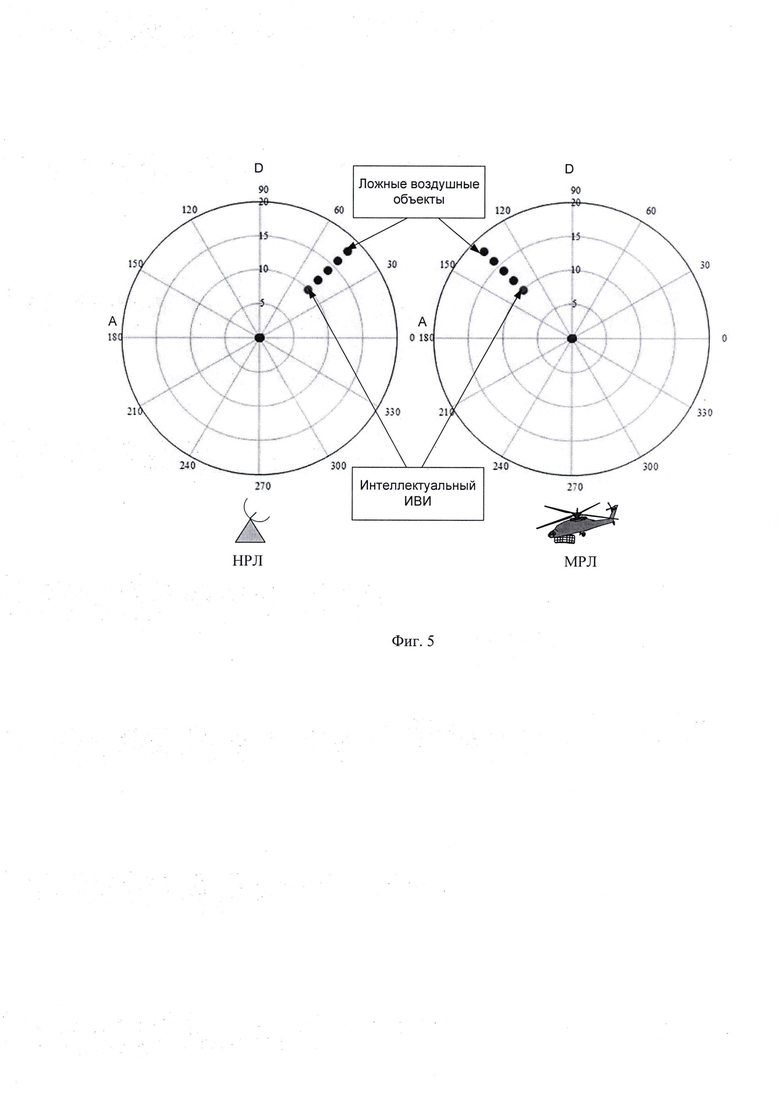
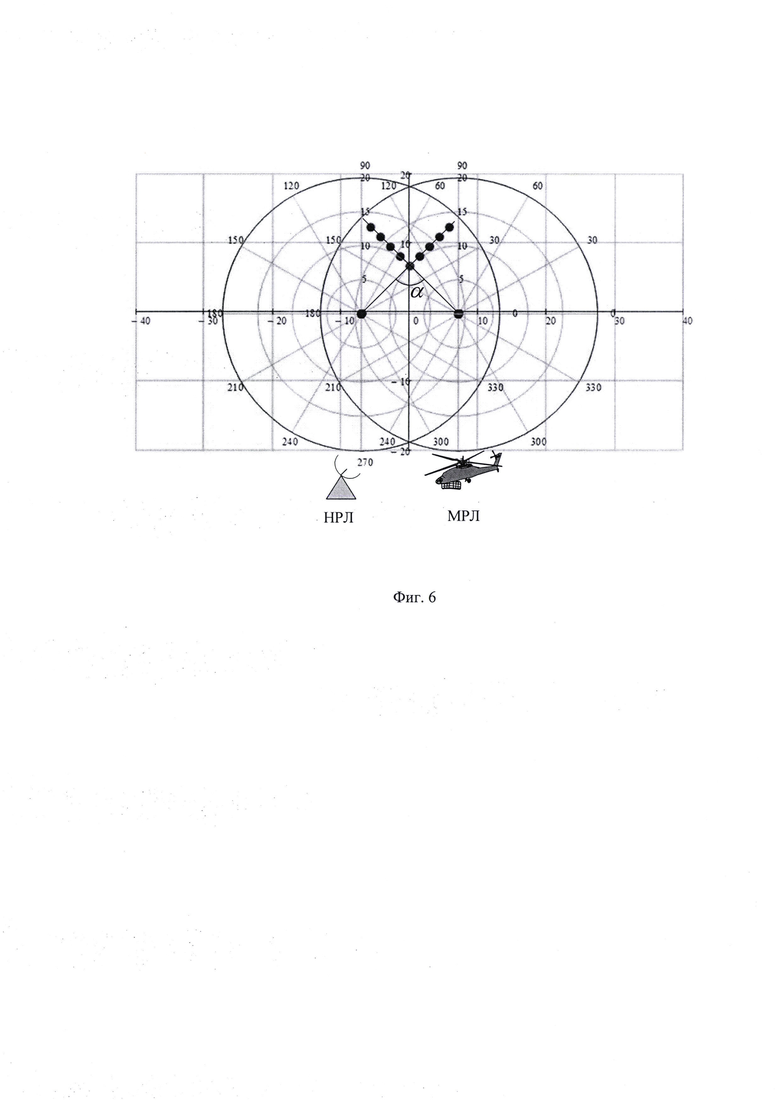
Сущность селекции состоит в том, что, например, при наличии интеллектуальных ИВИ, на индикаторе кругового обзора (ИКО) оператора НРЛ возникают множество ложных отметок формируемых ИВИ за собой, при его облучении с различных угловых направлений (фиг. 5). В результате, за счет ориентирования и пересчета координат ВО из сферической системы в прямоугольную, координаты ложных и реальных ВО полученных с МРЛ и НРЛ, до принятия решения оператора на селекцию ИВИ будут совпадать (фиг. 6). Однако исходя из специфики интеллектуальных ИВИ координаты ложных ВО принятые с разных ракурсов будут отличны друг от друга, а координаты реальных ВО и самого ИВИ останутся низменными. Поэтому удаляясь от НРЛ, МРЛ изменяет угол излучения и приема α переизлученного сигнала интеллектуальным ИВИ, что позволит использовать данный эффект, как признак селекции ложных ВО демаскирующий реальные ВО (фиг. 6). При этом стоит отметить, что после селекции могут остаться координаты реальных ВО и самого интеллектуального ИВИ, что требует привлечения дополнительных алгоритмов направленных на их разделение.
Операции, выражающие существо предлагаемого способа селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора, могут быть описаны следующей совокупностью последовательных действий:
1) совместное размещение НРЛ и МРЛ;
2) синхронный, круговой обзор воздушного пространства НРЛ на частоте f1 и МРЛ частоте f2;
3) запись в память ЭВМ оцифрованного, принятого сигнала с каждого углового направления РЛКО НРЛ и МРЛ;
4) обнаружение ВО НРЛ на частоте f1;
5) обнаружение ВО НРЛ на частоте f2;
6) определение координат обнаруженных ВО НРЛ и их пересчет в прямоугольную систему координат;
7) определение координат обнаруженных ВО МРЛ и их пересчет в прямоугольную систему координат;
8) удаление МРЛ относительно НРЛ;
9) синхронная передача координат ВО обнаруженных МРЛ на НРЛ в момент времени t;
10) сравнение координат ВО обнаруженных МРЛ с координатами ВО обнаруженных НРЛ на предмет их совпадения;
11) селекция (удаление) не совпадающих координат ВО обнаруженных МРЛ с координатами ВО обнаруженных НРЛ;
12) выбор оцифрованных, принятых сигналов из памяти ЭВМ, для оставшихся после селекции ВО, обнаруженных МРЛ и НРЛ;
13) селекция (удаление) координат ВО соответствующих ИВИ на основе по парного сравнения выбранных сигналов;
14) вывод на индикатор кругового обзора оператора координат ВО принятых за реальные.
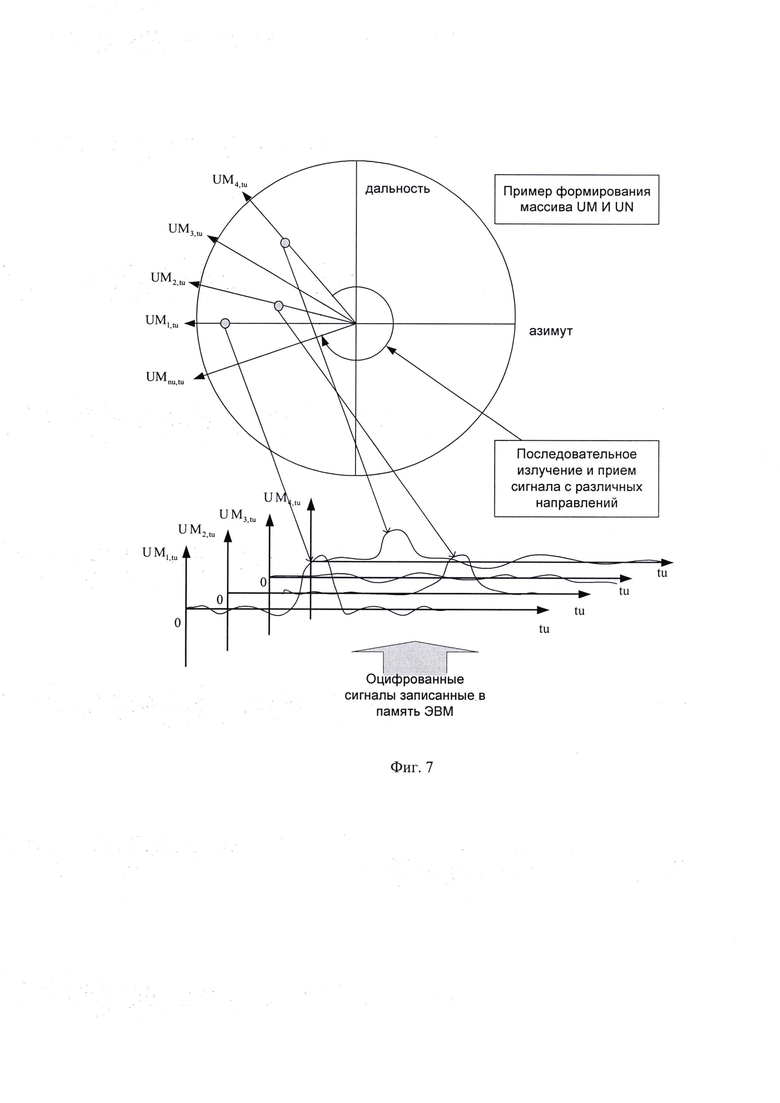
Суть предлагаемого способа селекции реальных воздушных объектов на фоне ложных, формируемых интеллектуальными ИВИ, заключается в следующем. Наземный радиолокатор осуществляет поиск (мгновенное, круговое сканирование пространства) воздушных объектов с помощью РЛКО, излучая в пространство зондирующий сигнал на частоте f1, при этом оцифрованный сигнал SNtu, принятый с каждого углового направления, записывается в память ЭВМ в виде массива UNnu,tu (фиг. 7), где  a NU - число угловых направлений излучения и приема зондирующего сигнала,
a NU - число угловых направлений излучения и приема зондирующего сигнала,  a TU - время приема и оцифровки сигнала с заданного направления. Проводит отождествление обнаруженных ВО на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики, в части касающейся обнаружения ВО. При этом МРЛ находится, в месте с НРЛ. Координаты, получаемые от воздушных объектов НРЛ из сферической системы пересчитываются в прямоугольную систему. После принятия оператором решения на селекцию ИВИ по соответствующей команде (сигналу) МРЛ начинает удаляться в перпендикулярном направлении относительно НРЛ в направлении выбранном оператором и начинает осуществлять поиск воздушных объектов, излучая в пространство зондирующий сигнал на частоте f2. Проводит отождествление обнаруженных ВО на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики, в части касающейся обнаружения ВО. Причем частота £2 на МРЛ выбирается таким образом, чтобы обеспечить электромагнитную совместимость с НРЛ.
a TU - время приема и оцифровки сигнала с заданного направления. Проводит отождествление обнаруженных ВО на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики, в части касающейся обнаружения ВО. При этом МРЛ находится, в месте с НРЛ. Координаты, получаемые от воздушных объектов НРЛ из сферической системы пересчитываются в прямоугольную систему. После принятия оператором решения на селекцию ИВИ по соответствующей команде (сигналу) МРЛ начинает удаляться в перпендикулярном направлении относительно НРЛ в направлении выбранном оператором и начинает осуществлять поиск воздушных объектов, излучая в пространство зондирующий сигнал на частоте f2. Проводит отождествление обнаруженных ВО на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики, в части касающейся обнаружения ВО. Причем частота £2 на МРЛ выбирается таким образом, чтобы обеспечить электромагнитную совместимость с НРЛ.
При этом оцифрованный сигнал SMtu, принятый с каждого углового направления МРЛ, записывается в память ЭВМ в виде массива UМnu,tu (фиг. 7), где  a MU - число угловых направлений излучения и приема зондирующего сигнала,
a MU - число угловых направлений излучения и приема зондирующего сигнала,  a TU - время приема и оцифровки сигнала с заданного направления. Параллельно пересчитанные координаты ВО обнаруженных на частоте f2 с МРЛ в виде массива VMz1=(CM1(xm1,ym1,zm1), CM2(xm2,ym2,zm2), …, CMz1(xmz1,ymz1,zmz1)) синхронно передаются на НРЛ, причем YM1=VM1(1,1,1)=CM1(xm1, ym1, zm1), а VM1(l,0,0)=xm1,VM1(0,l,0)=ym1,VM1(0,0,l)=zm1 и т.д, где СМ1, СМ2, …, CMz1 – ВО обнаруженные МРЛ,
a TU - время приема и оцифровки сигнала с заданного направления. Параллельно пересчитанные координаты ВО обнаруженных на частоте f2 с МРЛ в виде массива VMz1=(CM1(xm1,ym1,zm1), CM2(xm2,ym2,zm2), …, CMz1(xmz1,ymz1,zmz1)) синхронно передаются на НРЛ, причем YM1=VM1(1,1,1)=CM1(xm1, ym1, zm1), а VM1(l,0,0)=xm1,VM1(0,l,0)=ym1,VM1(0,0,l)=zm1 и т.д, где СМ1, СМ2, …, CMz1 – ВО обнаруженные МРЛ,  а Ζ1 - количество ВО обнаруженных МРЛ,
а Ζ1 - количество ВО обнаруженных МРЛ,  а ХМ - дальность обнаружения ВО МРЛ,
а ХМ - дальность обнаружения ВО МРЛ,  a ΥΜ - азимут обнаружения ВО МРЛ,
a ΥΜ - азимут обнаружения ВО МРЛ,  a ΖΜ - высота обнаружения ВО МРЛ. Одновременно на НРЛ осуществляется формирование массива массива UNnu,tu в который записываются пересчитанные координаты ВО VNz2=(CN1 (xn1, yn1, zn1), CN2 (xn2, yn2, zn2), …, CNz2 (xnz2, ynz2, znz2)) обнаруженных на частоте f1 с НРЛ, причем VN1=VN1 (1,1,1)=CN1(xn1yn1,zn1), а VN1(l,0,0)=xn1, VN1(0,1,0)=yn1,VN1(0,0,l)=zn1, где CN1,CN2, …, CNz2 - ВО обнаруженные НРЛ,
a ΖΜ - высота обнаружения ВО МРЛ. Одновременно на НРЛ осуществляется формирование массива массива UNnu,tu в который записываются пересчитанные координаты ВО VNz2=(CN1 (xn1, yn1, zn1), CN2 (xn2, yn2, zn2), …, CNz2 (xnz2, ynz2, znz2)) обнаруженных на частоте f1 с НРЛ, причем VN1=VN1 (1,1,1)=CN1(xn1yn1,zn1), а VN1(l,0,0)=xn1, VN1(0,1,0)=yn1,VN1(0,0,l)=zn1, где CN1,CN2, …, CNz2 - ВО обнаруженные НРЛ,  a Z2 - количество ВО обнаруженных НРЛ,
a Z2 - количество ВО обнаруженных НРЛ,  a XN - дальность обнаружения ВО МРЛ,
a XN - дальность обнаружения ВО МРЛ,  a YN - азимут обнаружения ВО НРЛ,
a YN - азимут обнаружения ВО НРЛ,  a ZN - высота обнаружения ВО НРЛ. Затем формируются два опорных массива Xs и Ys, где S - количество элементов массива равное Z1, если Z1≥Z2 или Z2 если Z2>Z1 и
a ZN - высота обнаружения ВО НРЛ. Затем формируются два опорных массива Xs и Ys, где S - количество элементов массива равное Z1, если Z1≥Z2 или Z2 если Z2>Z1 и  причем элементы массивов Xs и Ys имеют статус неопределенного особого состояния NaN [17], которые обращают результат любой математической операции с данным элементом в состояние NaN (данное состояние необходимо так, как если заменять отсутствующие элементы массива Xs и Ys нулями то в дальнейшем при отображении координат ВО на индикаторе кругового обзора возможно формирование ложных отметок с координатами (0,0,0)).
причем элементы массивов Xs и Ys имеют статус неопределенного особого состояния NaN [17], которые обращают результат любой математической операции с данным элементом в состояние NaN (данное состояние необходимо так, как если заменять отсутствующие элементы массива Xs и Ys нулями то в дальнейшем при отображении координат ВО на индикаторе кругового обзора возможно формирование ложных отметок с координатами (0,0,0)).
После чего предложено заполнять элементы массивов Xs и Ys по формулам:


В дальнейшем предложено сформировать квадратную матрицу Ks,s2, где  причем элементы матрицы имеют статус неопределенного особого состояния NaN, которую заполняют по формуле
причем элементы матрицы имеют статус неопределенного особого состояния NaN, которую заполняют по формуле

где |…| - математическая операция соответствующая модулю; Δ1, Δ2, Δ3 - пороговые значения определяемые разрешающей способностью РЛКО по дальности, азимуту и высоте соответственно.
Полученная квадратная матрица Ks,s2, имеет элементы массива, отвечающие координатам реальных целей и ИВИ. Для их выделения предложено создать массив отождествленных реальных ВО и ИВИ Rs по формуле:
После чего из массивов UМnu,tu и UNnu,tu формируют массивы USMs,tu и USNs,tu, в которые записывают сигналы SMtu и SNtu соответствующие отождествленным координатам реальных ВО и ИВИ массива Rs.
Селекцию (удаление) координат ВО соответствующих ИВИ отождествленных реальных ВО и ИВИ массива Rs предложено производить на основе попарного сравнения выбранных сигналов из массивов USMs,tu и USNs,tu по формуле:
где |…| - математическая операция соответствующая модулю; Δr – пороговое значения определяемое мощностью обнаружения одиночной цели.
После чего предлагается на НРЛ сформировать нулевую матрицу кругового обзора M(DxAxH), где D - количество ячеек соответствующих предельной дальности обнаружения ВО равное ХМ, если ХМ≥XN или XN если XN>XM и  а А - количество ячеек соответствующих предельному азимуту обнаружения ВО равное YM, если YM≥YN или YN если YN>YM и
а А - количество ячеек соответствующих предельному азимуту обнаружения ВО равное YM, если YM≥YN или YN если YN>YM и  Η - количество ячеек соответствующих предельной высоте обнаружения ВО равное ΖΜ, если ΖΜ≥ΖΝ или ΖΝ если ΖΝ>ΖΜ и
Η - количество ячеек соответствующих предельной высоте обнаружения ВО равное ΖΜ, если ΖΜ≥ΖΝ или ΖΝ если ΖΝ>ΖΜ и  Затем в матрицу Μ записываются координаты реальных ВО после селекции от ложных ВО по формуле:
Затем в матрицу Μ записываются координаты реальных ВО после селекции от ложных ВО по формуле:

После чего, на основе сознанной матрицы М, у оператора формируется изображение воздушной обстановки на индикаторе кругового обзора по дальности и азимуту с указанием высоты полета ВО, без ложных ВО формируемых интеллектуальными ИВИ.
Как видно из описания предлагаемого способа селекции ИВИ, он обладает преимуществом по сравнению с прототипом [15]. Это выражается в том, что отсутствует необходимость в дополнительной процедуре выноса заранее НИМ. Способ работоспособен в условиях использования множества интеллектуальных ИВИ независимо от их числа и программной процедуре выборочного ответа при его облучении с различных направлений.
К тому же при дополнительном использовании РЛКО в пассивном режиме на МРЛ, появляется возможность осуществлять дальнейшею селекцию ложных ВО типа MALD по указанию оператора, как в способе [15].
Способ легко реализуем и основан на известных и осуществимых операциях, устройствах и методах. Способ может быть рекомендован для построения перспективных радиолокационных, мобильных систем дециметрового и сантиметрового диапазонов различного назначения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. 236 с.
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. с. 96-99 (аналог).
3. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М.: Сов. радио, 1973. 496 с.
4. Радиоэлектронные системы. Справочник. Основы построения и теория. Под ред. Я.Д. Ширмана. М.: Радиотехника. 2007. 510 с.
5. Справочник по радиолокации / Под ред. М. Сколника. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М.: Сов. радио, 1976. 456 с.
6. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. 560 с.
7. Афинов В. Американский имитатор воздушной цели MALD // Зарубежное военное обозрение, 1998. №5. с. 32.
8. Афинов В. Тенденции развития средств РЭБ авиации Вооруженных сил США на пороге XXI века // Зарубежное военное обозрение, 1998. №6. С. 28-35.
9. Афинов В. Новое направление развития западных средств РЭП индивидуальной защиты самолетов // Зарубежное военное обозрение. 1999. №8. С. 39-42.
10. Патент РФ №2348053 от 27.02.2009 г. G01S 13/02. Способ распознавания ложных воздушных целей. Митрофанов Д.Г., Бортовик В.В., Сафонов А.В., Силаев Н.В. и др. Заявка №2007138527 от 16.10.2007. БИ №6. (прототип).
11. Доброленский Ю.П. Динамика полета в неспокойной атмосфере. М.: Машиностроение, 1969. 256 с.
12. Макаев В.Е., Васильев О.В. Метод радиолокационного распознавания воздушной цели по «турбинному эффекту» // Радиотехника, 2000. №11. С. 30-33.
13. Митрофанов Д.Г., Прохоркин А.Г. Методы компенсации влияния составляющих турбинного эффекта при построении изображений воздушных целей // Радиотехника, 2006. №9. С. 32-37.
14. Митрофанов Д.Г. Формирование радиолокационных изображений при негативном влиянии турбовинтовой модуляции // Измерительная техника. №7. 2005. С. 60-64.
15. Патент РФ №2694276 от 11.07.2019 г. G01S 13/02. Способ селекции имитаторов вторичного излучения воздушных объектов. Митрофанов Д.Г., Бортовик В.В., Сафонов А.В., Силаев Н.В. и др. Заявка №2018142360 от 29.11.2018. БИ №6. (прототип).
16. Имитатор радиолокационных сигналов микроволнового диапазона / Бабков В.П., Горбунов И.Г., Калениченко С.П. и др. // Проблемы прогнозирования черезвычайных ситуаций и их последствий: Тез. докл. науч.-практ. конф. НИИ «Прогноз» СПбГЭТУ «ЛЭТИ», Санкт-Петербург, 22 ноября 2002. СПб.: Издательство» СПбГЭТУ «ЛЭТИ» 20002. С. 50-52.
17. https://ru.wikipedia.org/wiki/NaN.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ | 2003 |
|
RU2234110C1 |




Изобретение относится к методам обработки полученной радиолокационным способом информации и может быть использовано в радиолокационных станциях (РЛС) кругового обзора для селекции ложных воздушных объектов (ВО), имитирующих радиолокационные характеристики реальных воздушных объектов, то есть имитаторов вторичного излучения (ИВИ). Техническим результатом изобретения является обеспечение возможности селекции нескольких реальных ВО на фоне ИВИ, имитирующих радиолокационные характеристики реальных ВО. В способе используют совместно радиолокационные станции сопровождения и обнаружения на наземном радиолокаторе и радиолокационные станции кругового обзора совместно с пассивным приемным модулем, установленным на подвижном носителе. Это избавляет способ селекции имитаторов вторичного излучения воздушных объектов от необходимости знать вероятное направление полета реальных воздушных объектов. Решение о наличии или отсутствии ИВИ принимается по результатам сравнения координат всех обнаруженных воздушных объектов с двух точек пространства, в которых находится наземный радиолокатор и мобильный радиолокатор. 7 ил.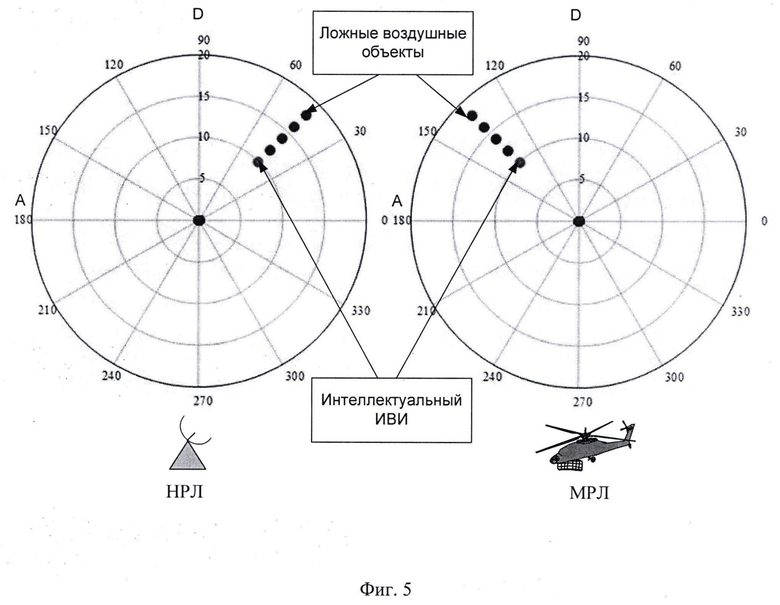
Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора, заключающийся в том, что в пространство с помощью радиолокационной станции кругового обзора с периодом повторения импульсных сигналов Ти излучают сверхвысокочастотные импульсные сигналы, принимают отраженные воздушными объектами сигналы, проводят их частотную фильтрацию и усиление, осуществляют обнаружение воздушных объектов, определяют значения угловых координат и дальности,
отличающийся тем, что для облучения воздушных объектов наземным радиолокатором, включающим радиолокационную станцию кругового обзора, применяют одночастотный сигнал, представляющий собой последовательность радиоимпульсов, причем несущие частоты в радиоимпульсах не отличаются по частоте и равны f1, при этом оцифрованный сигнал SNtu, принятый с каждого углового направления, записывается в память электронной вычислительной машины в виде массива UNnu,tu, где  a NU - число угловых направлений излучения и приема зондирующего сигнала,
a NU - число угловых направлений излучения и приема зондирующего сигнала,  , a TU - время приема и оцифровки сигнала с заданного направления, после чего координаты обнаруженных воздушных объектов пересчитывают из сферической системы координат в прямоугольную и записывают в постоянное запоминающее устройство в виде массива VNz2=(CN, (xn1,yn1,zn1),CN2(xn2,yn2,zn2), …, CNz2(xnz2,ynz2,znz2)), где CN1,CN2, …, CNz2 - воздушные объекты, обнаруженные наземным радиолокатором,
, a TU - время приема и оцифровки сигнала с заданного направления, после чего координаты обнаруженных воздушных объектов пересчитывают из сферической системы координат в прямоугольную и записывают в постоянное запоминающее устройство в виде массива VNz2=(CN, (xn1,yn1,zn1),CN2(xn2,yn2,zn2), …, CNz2(xnz2,ynz2,znz2)), где CN1,CN2, …, CNz2 - воздушные объекты, обнаруженные наземным радиолокатором,  , a Z2 - количество воздушных объектов, обнаруженных наземным радиолокатором,
, a Z2 - количество воздушных объектов, обнаруженных наземным радиолокатором,  , a XN - дальность обнаружения воздушного объекта наземным радиолокатором,
, a XN - дальность обнаружения воздушного объекта наземным радиолокатором,  , a YN - азимут обнаружения воздушного объекта наземным радиолокатором,
, a YN - азимут обнаружения воздушного объекта наземным радиолокатором,  , a ZN - высота обнаружения воздушного объекта наземным радиолокатором, после чего сравнивают с координатами обнаруженных воздушных объектов мобильным радиолокатором, который ориентирован относительно наземного радиолокатора в перпендикулярном направлении и осуществляет посредством радиолокационной станции кругового обзора синхронный с наземным радиолокатором круговой обзор воздушного пространства, при облучении воздушных объектов одночастотным сигналом, представляющим собой последовательность радиоимпульсов, в котором несущие частоты в радиоимпульсах не отличаются по частоте и равны f2, которая выбирается таким образом, чтобы обеспечить электромагнитную совместимость с наземным радиолокатором, при этом оцифрованный сигнал SMtu, принятый с каждого углового направления мобильным радиолокатором, записывается в память электронно-вычислительной машины в виде массива UMnu,tu, где
, a ZN - высота обнаружения воздушного объекта наземным радиолокатором, после чего сравнивают с координатами обнаруженных воздушных объектов мобильным радиолокатором, который ориентирован относительно наземного радиолокатора в перпендикулярном направлении и осуществляет посредством радиолокационной станции кругового обзора синхронный с наземным радиолокатором круговой обзор воздушного пространства, при облучении воздушных объектов одночастотным сигналом, представляющим собой последовательность радиоимпульсов, в котором несущие частоты в радиоимпульсах не отличаются по частоте и равны f2, которая выбирается таким образом, чтобы обеспечить электромагнитную совместимость с наземным радиолокатором, при этом оцифрованный сигнал SMtu, принятый с каждого углового направления мобильным радиолокатором, записывается в память электронно-вычислительной машины в виде массива UMnu,tu, где  , a MU - число угловых направлений излучения и приема зондирующего сигнала,
, a MU - число угловых направлений излучения и приема зондирующего сигнала,  , a TU - время приема и оцифровки сигнала с заданного направления, после чего координаты обнаруженных воздушных объектов мобильным радиолокатором пересчитываются из сферической системы координат в прямоугольную и передаются на наземный радиолокатор по средствам связи синхронно, в виде массива VMz1=(CM1(xm1,ym1,zm1),CM2(xm2,ym2,zm2), …, CMz1(xmz1,ymz1,zmz1)), где CM1, CM2, …, CMz1 - воздушные объекты, обнаруженные мобильным радиолокатором,
, a TU - время приема и оцифровки сигнала с заданного направления, после чего координаты обнаруженных воздушных объектов мобильным радиолокатором пересчитываются из сферической системы координат в прямоугольную и передаются на наземный радиолокатор по средствам связи синхронно, в виде массива VMz1=(CM1(xm1,ym1,zm1),CM2(xm2,ym2,zm2), …, CMz1(xmz1,ymz1,zmz1)), где CM1, CM2, …, CMz1 - воздушные объекты, обнаруженные мобильным радиолокатором,  , a Z1 - количество воздушных объектов, обнаруженных мобильным радиолокатором,
, a Z1 - количество воздушных объектов, обнаруженных мобильным радиолокатором,  , а ХМ - дальность обнаружения воздушных объектов, обнаруженных мобильным радиолокатором,
, а ХМ - дальность обнаружения воздушных объектов, обнаруженных мобильным радиолокатором,  , a YM - азимут обнаружения воздушных объектов, обнаруженных мобильным радиолокатором,
, a YM - азимут обнаружения воздушных объектов, обнаруженных мобильным радиолокатором,  , a ZM - высота обнаружения воздушных объектов мобильным радиолокатором с ракурса, отличного от наземного радиолокатора, для этого формируются два опорных массива Xs и Ys, где S - количество элементов массива равное Z1, если Z1>Z2, или Z2, если Z2>Z1 и
, a ZM - высота обнаружения воздушных объектов мобильным радиолокатором с ракурса, отличного от наземного радиолокатора, для этого формируются два опорных массива Xs и Ys, где S - количество элементов массива равное Z1, если Z1>Z2, или Z2, если Z2>Z1 и  , причем элементы массивов Xs и Ys имеют статус неопределенного особого состояния NaN, которые обращают результат любой математической операции в состояние NaN, после чего заполняют элементы массивов Xs и Ys по формулам:
, причем элементы массивов Xs и Ys имеют статус неопределенного особого состояния NaN, которые обращают результат любой математической операции в состояние NaN, после чего заполняют элементы массивов Xs и Ys по формулам:
после чего формируют квадратную матрицу Ks,s2, где  , причем элементы матрицы имеют статус неопределенного особого состояния NaN, которую заполняют по формуле
, причем элементы матрицы имеют статус неопределенного особого состояния NaN, которую заполняют по формуле

где  - математическая операция, соответствующая модулю; A1, А2, A3 - пороговые значения, определяемые разрешающей способностью радиолокатора кругового обзора по дальности, азимуту и высоте соответственно, в дальнейшем создают массив обнаруженных реальных воздушных объектов Rs по формуле:
- математическая операция, соответствующая модулю; A1, А2, A3 - пороговые значения, определяемые разрешающей способностью радиолокатора кругового обзора по дальности, азимуту и высоте соответственно, в дальнейшем создают массив обнаруженных реальных воздушных объектов Rs по формуле:

после чего из массивов UMnu,tu и UNnu,tu формируют массивы USMs,tu и USNs,tu, в которые записывают сигналы SMtu и SNtu, соответствующие отождествленным координатам реальных ВО и ИВИ массива Rs, после чего предложено селектировать координаты воздушных объектов, соответствующих имитаторам вторичного излучения из массива Rs, на основе попарного сравнения выбранных сигналов из массивов USMs,tu и USNs,tu по формуле:

где  - математическая операция, соответствующая модулю; Δr - пороговое значение, определяемое мощностью обнаружения одиночной цели, после чего на наземном радиолокаторе формируют нулевую матрицу кругового обзора M(D×A×H), где D - количество ячеек, соответствующих предельной дальности обнаружения воздушных объектов, равное ХМ, если ХМ≥XN, или XN, если XN>XM и
- математическая операция, соответствующая модулю; Δr - пороговое значение, определяемое мощностью обнаружения одиночной цели, после чего на наземном радиолокаторе формируют нулевую матрицу кругового обзора M(D×A×H), где D - количество ячеек, соответствующих предельной дальности обнаружения воздушных объектов, равное ХМ, если ХМ≥XN, или XN, если XN>XM и  , а А - количество ячеек, соответствующих предельному азимуту обнаружения воздушных объектов, равное YM, если YM≥YN, или YN, если YN>YM и
, а А - количество ячеек, соответствующих предельному азимуту обнаружения воздушных объектов, равное YM, если YM≥YN, или YN, если YN>YM и  , Н - количество ячеек, соответствующих предельной высоте обнаружения воздушных объектов, равное ZM, если ZM≥ZN, или ZN, если ZN>ZM и
, Н - количество ячеек, соответствующих предельной высоте обнаружения воздушных объектов, равное ZM, если ZM≥ZN, или ZN, если ZN>ZM и  , затем в матрицу М записываются координаты реальных воздушных объектов после селекции от ложных воздушных объектов по формуле:
, затем в матрицу М записываются координаты реальных воздушных объектов после селекции от ложных воздушных объектов по формуле:
после чего, на основе сознанной матрицы М, формируют изображение воздушной обстановки на индикаторе кругового обзора по дальности и азимуту с указанием высоты полета воздушного объекта без ложных воздушных объектов, формируемых интеллектуальными имитаторами вторичного излучения.
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| Способ опознавания целей (варианты) | 2016 |
|
RU2622888C1 |
| СЕРГУНОВ К.Ю | |||
| Применение пространственно-разнесённых радиолокационных станций для решения задачи селекции // Вестник Концерна ПВО "Алмаз-Антей", N 1, 2015, сс.59-64 | |||
| CN 107271965 A, 20.10.2017 | |||
| CN 110333492 A, 15.10.2019. | |||

