Изобретение относится к измерительной технике и может быть использовано в системах автоматики и сигнализации, а также для проверки исправности тормозной системы транспортных средств и предупреждения их опрокидывания.
Известен вибрационный датчик, содержащий электроконтактный датчик, вычислитель, индикатор направления перегрузки, индикатор величины перегрузки, блок обработки информации и индикатор превышения уровня перегрузки, при этом электроконтактный датчик состоит из немагнитного конусообразного корпуса с крышкой, размещенной в вершине корпуса, инерционного элемента, выполненного в виде электропроводного шарика, первого электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго электроконтакта, выполненного в виде полого конуса, размещенного по боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, изолированных между собой центрального и кольцевого электроконтактов, центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт размещен по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход - с входом индикатора величины перегрузки, вычислитель содержит группу из n триггеров, где n - число секторов первого электроконтакта электроконтактного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины, причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого через инвертор соединен с входом дифференцирующей цепи и первым входом второго элемента И, второй вход которого соединен с выходом генератора импульсов, а выход второго элемента И соединен с информационным входом счетчика импульсов, входы обнуления триггеров и счетчика импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шины источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы из n входов первого элемента ИЛИ, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход третьего элемента И соединен с входом обнуления счетчика импульсов, выход которого соединен с первым и вторым входами умножителя, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика постоянной величины, а выход является вторым выходом вычислителя, блок обработки информации состоит из n первых, n вторых пороговых устройств, n ключей, элемента ИЛИ и задатчика постоянных сигналов, причем второй выход вычислителя соединен соответственно с первым входом блока обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока обработки информации соединен с индикатором уровня перегрузки, первый и второй входы блока обработки информации соединены соответственно со вторыми входами n вторых и первыми входами n первых пороговых устройств, выходы n первых пороговых устройств соединены с первыми входами n ключей, первые и вторые выходы задатчика постоянных сигналов соединены соответственно со вторыми входами n первых пороговых устройств и вторыми входами n ключей, выходы которых через первые входы n вторых пороговых устройств соединены с n входами элемента ИЛИ, выход которого является выходом блока обработки информации (Патент РФ №2279645, м. кл. G01H 11/06, от 15.09.2004 г., опубл. 10.07.2006, бюл. №19).
Недостатком данного вибрационного датчика являются заниженные информационные возможности из-за отсутствия возможности анализа и сигнализации о возможности опрокидывания транспортных средств.
Технической задачей изобретения является расширение информационных возможностей вибрационного датчика.
Сущность предлагаемого изобретения заключается в том, что вибрационный датчик, содержащий электроконтактный датчик, вычислитель, индикатор направления перегрузки, индикатор величины перегрузки, блок обработки информации и индикатор, при этом электроконтактный датчик состоит из немагнитного конусообразного корпуса с крышкой, размещенной в вершине корпуса, инерционного элемента, выполненного в виде электропроводного шарика, первого электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго электроконтакта, выполненного в виде полого конуса, размещенного на боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, изолированных между собой центрального и кольцевого электроконтактов, центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт размещен по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход - с входом индикатора величины перегрузки, вычислитель содержит группу из n триггеров, где n - число секторов первого электроконтакта электроконтактного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины, причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого через инвертор соединен с входом дифференцирующей цепи и первым входом второго элемента И, второй вход которого соединен с выходом генератора импульсов, а выход второго элемента И соединен с информационным входом счетчика импульсов, входы обнуления триггеров и счетчика импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шины источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы из n входов первого элемента И, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход третьего элемента И соединен с входом обнуления счетчика импульсов, выход которого соединен с первым и вторым входами умножителя, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика постоянной величины, а выход является вторым выходом вычислителя, блок обработки информации состоит из n первых, n вторых пороговых устройств, n ключей, элемента ИЛИ и задатчика постоянных сигналов, причем второй выход вычислителя соединен соответственно с первым входом блока обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока обработки информации соединен с индикатором уровня перегрузки, первый и второй входы блока обработки информации соединены соответственно со вторыми входами n вторых и первыми входами n первых пороговых устройств, выходы n первых пороговых устройств соединены с первыми входами n ключей, первые и вторые выходы задатчика постоянных сигналов соединены соответственно со вторыми входами n первых пороговых устройств и вторыми входами n ключей, выходы которых через первые входы n вторых пороговых устройств соединены с n входами элемента ИЛИ, выход которого является выходом блока обработки информации, дополнительно имеет блок предупреждения опрокидывания, содержащий элемент ИЛИ, ключ, схему сравнения, задатчик постоянной величины и сигнализатор, причем первый и второй входы блока предупреждения опрокидывания соединены с соответствующими входами элемента ИЛИ, выход которого соединен с управляющим входом ключа, вход которого соединен с третьим входом блока предупреждения опрокидывания, а выход - с первым входом схемы сравнения, второй вход которой соединен с выходом задатчика постоянной величины, а выход - с входом сигнализатора, первый и второй входы блока предупреждения опрокидывания соединены с соответствующими выходами электроконтактного датчика, а третий вход блока предупреждения опрокидывания соединен с выходом вычислителя.
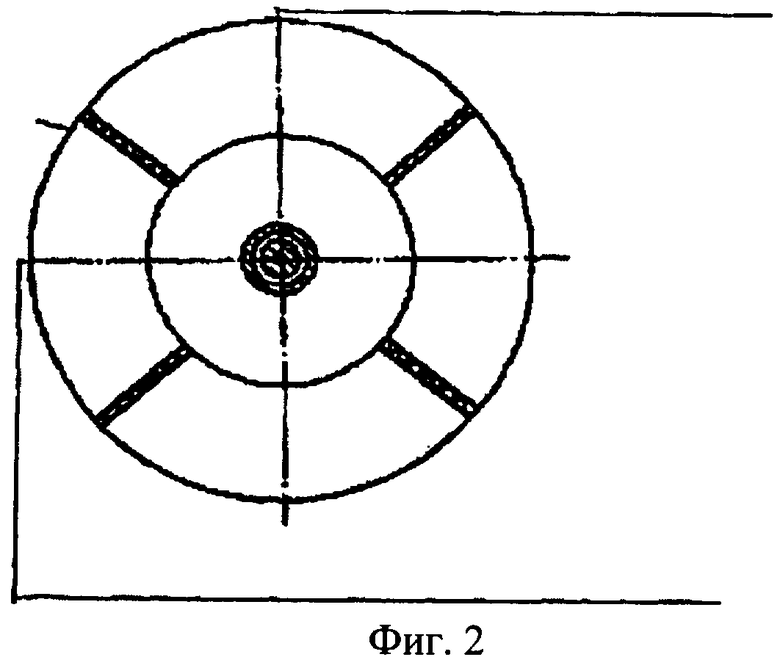
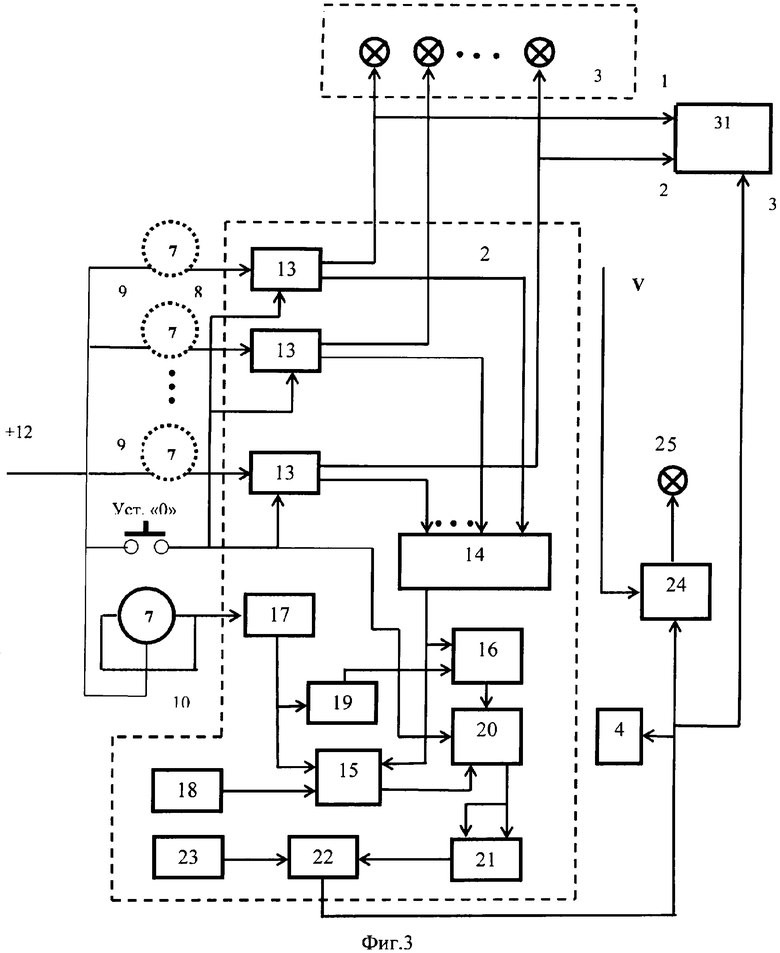
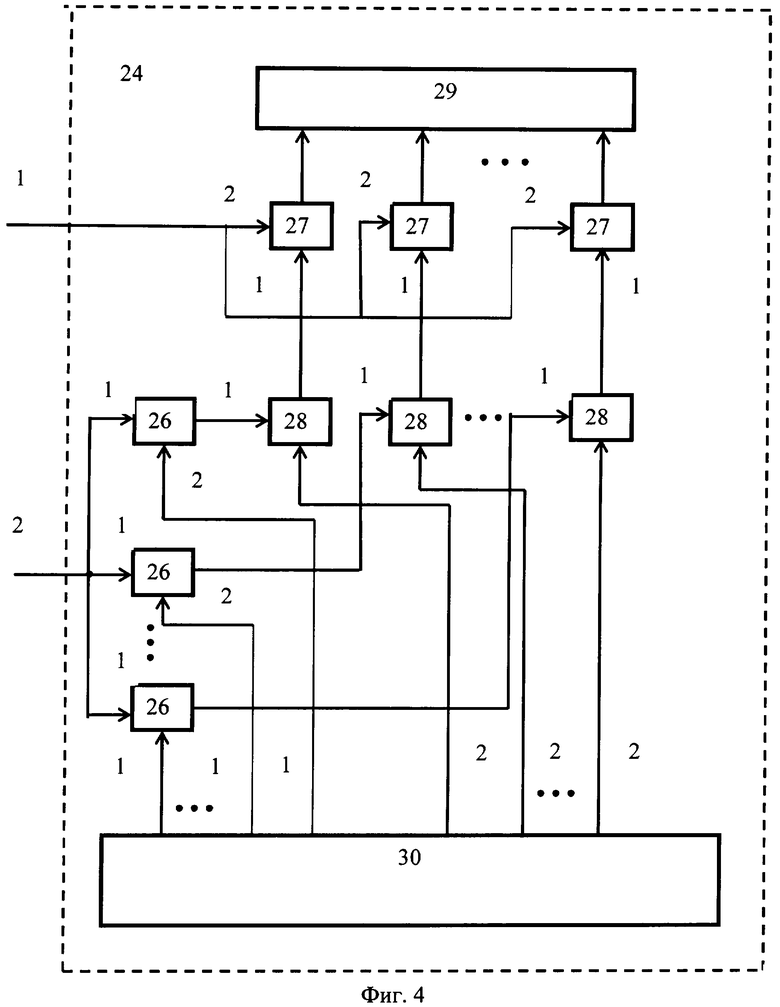
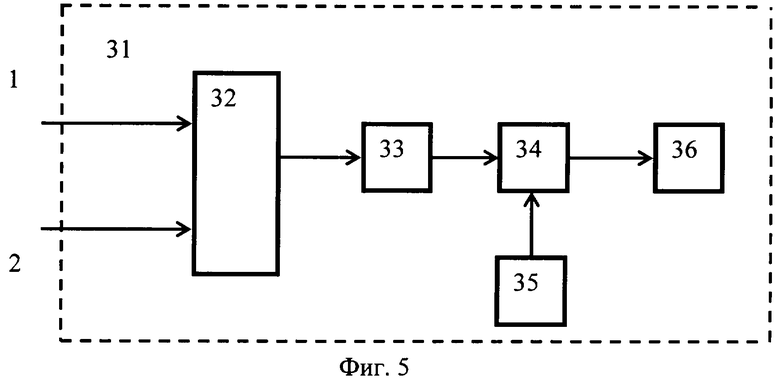
На фиг.1 изображена конструктивная схема вибрационного датчика, где 1 - немагнитный конусообразный корпус с крышкой 2; 3 - инерционный элемент; 4, 5, 9, 10 - электроконтакты. На фиг.2 - то же, план. На фиг.3 - структурная схема электрической части вибрационного датчика, где 2 - вычислитель; 3 - индикатор направления перегрузки; 4 - индикатор величины перегрузки; 7 - инерционный элемент; 8, 9 - первый и второй электроконтакты; 10 - центральный электроконтакт; 11 - кольцевой электроконтакт; 12 - источник питания; 13 - триггер; 14, 15, 16 - первый, второй и третий элементы И; 17 - инвертор; 18 - генератор импульсов; 19 - дифференцирующая цепь; 20 - счетчик импульсов; 21 - умножитель; 22 - делитель; 23 - задатчик постоянной величины; 24 - блок обработки информации; 25 - индикатор превышения уровня перегрузки; 31 - блок предупреждения опрокидывания. На фиг.4 - блок обработки информации, где 26, 27 n первых и вторых пороговых устройств; 28 - n ключей; 29 - элемент ИЛИ; 30 - задатчик сигналов. На фиг.5 - функциональная схема блока предупреждения опрокидывания, где 32 - элемент ИЛИ; 33 - ключ; 34 - схема сравнения; 35 - задатчик постоянной величины; 36 - сигнализатор.
Вибрационный датчик содержит электроконтактный датчик 1, вычислитель 2, индикатор 3 направления перегрузки, индикатор 4 величины перегрузки, блок 24 обработки информации и индикатор 25 превышения уровня перегрузки, при этом электроконтактный датчик 1 состоит из немагнитного конусообразного корпуса 5 с крышкой 6, размещенной в вершине корпуса, инерционного элемента 7, выполненного в виде электропроводного шарика, первого 8 электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго 9 электроконтакта, выполненного в виде полого конуса, размещенного на боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого 8 электроконтакта и параллельно ему, изолированных между собой центрального 10 и кольцевого 11 электроконтактов, центральный 10 электроконтакт размещен в вершине конуса второго 9 электроконтакта и изолирован от него, кольцевой 11 электроконтакт размещен по периметру вершины конуса второго 9 электроконтакта и изолирован от него, первый 8 электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика 1, вторым выходом которого является вывод кольцевого 11 электроконтакта, центральный 10 и второй 9 электроконтакты соединены с положительным выводом источника 12 питания, первая группа входов и второй вход вычислителя 2 соединены соответственно с первой группой выходов и вторым выходом датчика 1, первая группа выходов вычислителя 2 соединена с группой входов индикатора 3 направления перегрузки, второй выход - с входом индикатора 4 величины перегрузки, вычислитель 2 содержит группу из n триггеров 13, где n - число секторов первого 8 электроконтакта электроконтактного датчика 1, первый 14, второй 15 и третий 16 элементы И, инвертор 17, генератор 18 импульсов, дифференцирующую цепь 19, счетчик 20 импульсов, умножитель 21, делитель 22, задатчик 23 постоянной величины, причем информационные входы триггеров 13 соединены с соответствующими входами первой группы входов вычислителя 2, второй вход которого через инвертор 17 соединен с входом дифференцирующей цепи 19 и первым входом второго 15 элемента И, второй вход которого соединен с выходом генератора 18 импульсов, а выход второго 15 элемента И соединен с информационным входом счетчика 20 импульсов, входы обнуления триггеров 13 и счетчика 20 импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шины источника 12 питания, прямые выходы триггеров 13 являются соответствующими выходами первой группы выходов вычислителя 2, а инверсные выходы соединены с соответствующими входами группы из n входов первого 14 элемента И, выход которого соединен с третьим входом второго 15 элемента И и вторым входом третьего 16 элемента И, первый вход которого соединен с выходом дифференцирующей цепи 19, а выход третьего 16 элемента И соединен с входом обнуления счетчика 20 импульсов, выход которого соединен с первым и вторым входами умножителя 21, выход которого соединен с первым входом делителя 22, второй вход которого соединен с выходом первого 23 задатчика постоянной величины, а выход является вторым выходом вычислителя 2, блок 24 обработки информации состоит из n первых 26, n вторых 27 пороговых устройств, n ключей 28, элемента 29 ИЛИ и задатчика постоянных сигналов 30, причем второй выход вычислителя 2 соединен соответственно с первым входом блока 24 обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока 24 обработки информации соединен с индикатором уровня перегрузки, первый и второй входы блока 24 обработки информации соединены соответственно со вторыми входами n вторых 27 и первыми входами n первых 26 пороговых устройств, выходы n первых 26 пороговых устройств соединены с первыми входами n ключей 28, первые и вторые выходы второго 30 задатчика постоянных сигналов соединены соответственно со вторыми входами n первых 26 пороговых устройств и вторыми входами n ключей 28, выходы которых через первые входы n вторых 27 пороговых устройств соединены с n входами элемента 29 ИЛИ, выход которого является выходом блока 24 обработки информации, дополнительно имеет блок 31 предупреждения опрокидывания, содержащий элемент 32 ИЛИ, ключ 33, схему 34 сравнения, задатчик 35 постоянной величины и сигнализатор 36, причем первый и второй входы блока 31 предупреждения опрокидывания соединены с соответствующими входами элемента 32 ИЛИ, выход которого соединен с управляющим входом ключа 33, вход которого соединен с третьим входом блока 31 предупреждения опрокидывания, а выход - с первым входом схемы 34 сравнения, второй вход которой соединен с выходом задатчика 35 постоянной величины, а выход - с входом сигнализатора 36, первый и второй входы блока 31 предупреждения опрокидывания соединены с соответствующими выходами электроконтактного датчика 1, а третий вход блока предупреждения опрокидывания соединен с выходом вычислителя 2.
Вибрационный датчик функционирует следующим образом.
Вибрационный датчик устанавливается на транспортное средство таким образом, чтобы выходы электроконтактного датчика, соединенные с блоком предупреждения опрокидывания, были перпендикулярны направлению движения транспортного средства.
В исходном состоянии сигнал с положительной шины питания подается на входы обнуления счетчика 20 и группы из n триггеров 13, при этом с инверсных выходов триггеров 13 сигналы через первый 14 элемент И поступают на третий вход второго 15 элемента И. Под воздействием перегрузки энерционный элемент 7 в виде электропроводного шарика перемещается в направлении одного из секторов первого 8 электроконтакта, при этом происходит размыкание центрального 10 и кольцевого электроконтакта 11 (фиг.1 и 2), приводящее к снятию сигнала с выхода инвертора 17.
Сигнал с выхода инвертора 17 поступает на вход дифференцирующей цепи 19 и на первый вход второго 15 элемента И (фиг.3).
С выхода дифференцирующей цепи 19 сигнал через первый вход третьего 16 элемента И поступает на вход обнуления счетчика 20.
С выхода генератора 18 сигнал в виде импульсов поступает через второй вход второго 15 элемента И на первый вход счетчика 20.
В дальнейшем при движении электропроводного шарика 7 происходит замыкание второго 9 и одного из секторов первого 8 электроконтакта (фиг.2), при этом сигнал поступает на первый вход одного из n триггеров 13, с прямого выхода которого сигнал поступает на вход индикатора 3 направления перегрузки, а отсутствие сигнала с инверсного выхода триггера 13 приводит к прекращению подсчета импульсов счетчиком 20 через первый 14 и второй 15 элементы И.
С выхода счетчика 20 импульсов сигнал, пропорциональный времени t движения электропроводного шарика, поступает на первый и второй входы умножителя 21, с выхода которого сигнал, пропорциональный t2, поступает на первый вход делителя 22, на второй вход которого с выхода задатчика 23 поступает сигнал, пропорциональный величине  (фиг.2).
(фиг.2).
С выхода делителя 22 сигнал, пропорциональный  поступает одновременно на вход индикатора 4 величины перегрузки, на первый вход блока обработки информации 24 и на третий вход блока 31 предупреждения опрокидывания.
поступает одновременно на вход индикатора 4 величины перегрузки, на первый вход блока обработки информации 24 и на третий вход блока 31 предупреждения опрокидывания.
Блок 24 обработки информации предназначен для определения исправности тормозной системы транспортного средства путем сравнения текущей величины перегрузки n с эталонными значениями с учетом начальных условий возникновения перегрузки (фиг.4).
С первой группы выходов второго 30 задатчика сигналы поступают на вторые входы первого 26 порогового устройства, на первые входы которого поступают сигналы, пропорциональные скорости движения транспортного средства. С выходов первых 27 пороговых устройств сигналы, соответствующие скорости движения транспортного средства, поступают на первые входы ключей 28, на вторые входы которых поступают сигналы, пропорциональные эталонным значениям перегрузки, со вторых выходов второго 30 задатчика сигналов.
С выходов n ключей 28 сигналы поступают на первые входы n вторых 27 пороговых устройств, на вторые входы которых поступает сигнал, пропорциональный текущей перегрузке nтек.
В случае превышения уровня текущей перегрузки заданных эталонных значений сигнал с выходов вторых 27 пороговых устройств через первый 29 элемент ИЛИ поступает на вход индикатора 25 превышения уровня перегрузки, тем самым обеспечивая автоматическое определение исправности тормозной системы транспортного средства.
Таким образом обеспечивается автоматическое определение исправности тормозной системы транспортного средства за счет сравнения текущей величины перегрузки с заданным эталонным значением с учетом начальных условий возникновения перегрузки.
Блок предупреждения опрокидывания 31 функционирует следующим образом.
При возникновении поперечной перегрузки на соответствующих первых выходах вычислителя 2 формируется сигнал, который через первый или второй вход блока предупреждения опрокидывания 31 поступает на вход элемента ИЛИ 32. Сигналом с выхода элемента ИЛИ 32 открывается ключ 33 и сигнал со второго выхода вычислителя 2, соответствующий величине перегрузки, поступает на первый вход схемы сравнения 34. На второй вход схемы сравнения 34 поступает сигнал с выхода задатчика постоянной величины 35, соответствующий величине предельной боковой перегрузки. При превышении сигнала со второго выхода вычислителя 2 сигнала с выхода задатчика постоянной величины 35 на выходе схемы сравнения 34 формируется сигнал, поступающий на сигнализатор 36 для предупреждения о возможности опрокидывания транспортного средства.
Изобретение относится к измерительной технике и может быть использовано в системах автоматики и сигнализации, а также для проверки исправности тормозной системы транспортных средств и предупреждения их опрокидывания. Устройство содержит электроконтактный датчик, вычислитель, индикатор направления перегрузки, индикатор величины перегрузки, блок обработки информации, индикатор превышения уровня перегрузки и блок предупреждения опрокидывания, содержащий элемент ИЛИ, ключ, схему сравнения, задатчик постоянной величины и сигнализатор. Причем первый и второй входы блока предупреждения опрокидывания соединены с соответствующими входами элемента ИЛИ, выход которого соединен с управляющим входом ключа, вход которого соединен с третьим входом блока предупреждения опрокидывания, а выход - с первым входом схемы сравнения, второй вход которой соединен с выходом задатчика постоянной величины, а выход - с входом сигнализатора. Первый и второй входы блока предупреждения опрокидывания соединены с соответствующими выходами электроконтактного датчика, а третий вход блока предупреждения опрокидывания соединен с выходом вычислителя. Технический результат заключается в расширении информационных возможностей датчика. 5 ил.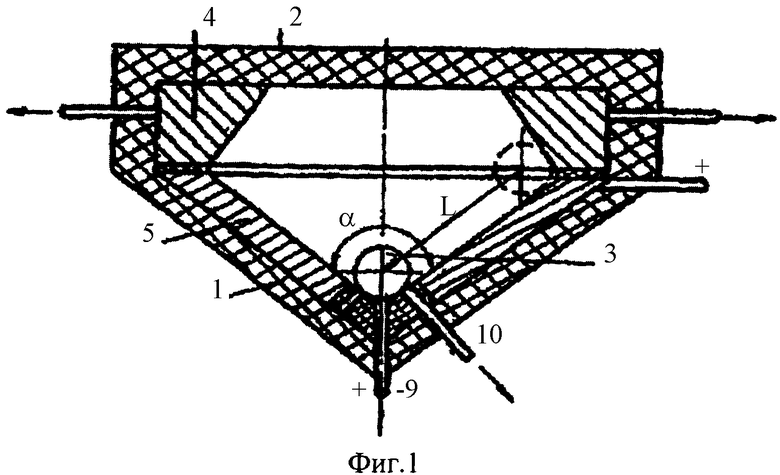
Вибрационный датчик, содержащий электроконтактный датчик, вычислитель, индикатор направления перегрузки, индикатор величины перегрузки, блок обработки информации и индикатор, при этом электроконтактный датчик состоит из немагнитного конусообразного корпуса с крышкой, размещенной в вершине корпуса, инерционного элемента, выполненного в виде электропроводного шарика, первого электроконтакта, выполненного в виде усеченного полого конуса, закрепленного на крышке корпуса, второго электроконтакта, выполненного в виде полого конуса, размещенного на боковой поверхности корпуса так, что его основание обращено к нижнему основанию усеченного конуса первого электроконтакта и параллельно ему, изолированных между собой центрального и кольцевого электроконтактов, центральный электроконтакт размещен в вершине конуса второго электроконтакта и изолирован от него, кольцевой электроконтакт размещен по периметру вершины конуса второго электроконтакта и изолирован от него, первый электроконтакт выполнен в виде изолированных друг от друга секторов, выводы которых образуют первую группу выходов датчика, вторым выходом которого является вывод кольцевого электроконтакта, центральный и второй электроконтакты соединены с положительным выводом источника питания, первая группа входов и второй вход вычислителя соединены соответственно с первой группой выходов и вторым выходом датчика, первая группа выходов вычислителя соединена с группой входов индикатора направления перегрузки, второй выход - с входом индикатора величины перегрузки, вычислитель содержит группу из n-триггеров, где n - число секторов первого электроконтакта электроконтактного датчика, первый, второй и третий элементы И, инвертор, генератор импульсов, дифференцирующую цепь, счетчик импульсов, умножитель, делитель, задатчик постоянной величины, причем информационные входы триггеров соединены с соответствующими входами первой группы входов вычислителя, второй вход которого через инвертор соединен с входом дифференцирующей цепи и первым входом второго элемента И, второй вход которого соединен с выходом генератора импульсов, а выход второго элемента И соединен с информационным входом счетчика импульсов, входы обнуления триггеров и счетчика импульсов объединены с обеспечением возможности подачи на них сигнала с плюсовой шины источника питания, прямые выходы триггеров являются соответствующими выходами первой группы выходов вычислителя, а инверсные выходы соединены с соответствующими входами группы из n-входов первого элемента И, выход которого соединен с третьим входом второго элемента И и вторым входом третьего элемента И, первый вход которого соединен с выходом дифференцирующей цепи, а выход третьего элемента И соединен с входом обнуления счетчика импульсов, выход которого соединен с первым и вторым входами умножителя, выход которого соединен с первым входом делителя, второй вход которого соединен с выходом задатчика постоянной величины, а выход является вторым выходом вычислителя, блок обработки информации состоит из n первых, n вторых пороговых устройств, n ключей, элемента ИЛИ и задатчика постоянных сигналов, причем второй выход вычислителя соединен соответственно с первым входом блока обработки информации, второй вход которого соединен с выходом датчика скорости движения транспортного средства, а выход блока обработки информации соединен с индикатором уровня перегрузки, первый и второй входы блока обработки информации соединены соответственно со вторыми входами n вторых и первыми входами n первых пороговых устройств, выходы n первых пороговых устройств соединены с первыми входами n ключей, первые и вторые выходы задатчика постоянных сигналов соединены соответственно со вторыми входами n первых пороговых устройств и вторыми входами n ключей, выходы которых через первые входы n вторых пороговых устройств соединены с n входами элемента ИЛИ, выход которого является выходом блока обработки информации, отличающийся тем, что имеет блок предупреждения опрокидывания, содержащий элемент ИЛИ, ключ, схему сравнения, задатчик постоянной величины и сигнализатор, причем первый и второй входы блока предупреждения опрокидывания соединены с соответствующими входами элемента ИЛИ, выход которого соединен с управляющим входом ключа, вход которого соединен с третьим входом блока предупреждения опрокидывания, а выход - с первым входом схемы сравнения, второй вход которой соединен с выходом задатчика постоянной величины, а выход - с входом сигнализатора, первый и второй входы блока предупреждения опрокидывания соединены с соответствующими выходами электроконтактного датчика, а третий вход блока предупреждения опрокидывания соединен с выходом вычислителя.
| ВИБРАЦИОННЫЙ ДАТЧИК | 2004 |
|
RU2279645C2 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 1990 |
|
RU2044286C1 |
| Вибрационный пороговый датчик | 1983 |
|
SU1245892A1 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 1990 |
|
RU2010336C1 |
| RU 2071032 C1, 27.12.1996. | |||

