Область техники, к которой относится изобретение
Изобретение относится к авиации и может быть использовано в любом виде техники, где применяются аэродинамический принцип движения и пространственного управления аппаратом с использованием несущего винта. В частности, изобретение может применяться в конструкциях легких автожиров и вертолетов.
Уровень техники
Известны следующие схемы несущих винтов, близкие по конструкции и принципиальным решениям к описываемому изобретению и являющиеся его аналогами.
Несущий винт с шарнирным креплением лопастей [Ю.С.Богданов, Р.А.Михеев, Д.Д.Скулков. Конструкция вертолетов. - М.: Машиностроение, 1990. - 272 с.], получивший наибольшее распространение в конструкциях вертолетов, состоит из вала с закрепленными на нем лопастями. Каждая лопасть в комлевой части имеет три шарнира - горизонтальный, вертикальный и осевой. Горизонтальный шарнир предназначен для компенсации махового движения лопасти, возникающего в результате действия переменных аэродинамических и инерционных сил в плоскости, перпендикулярной плоскости вращения несущего винта. Вертикальный шарнир используется с целью снижения нагрузок на комлевую часть лопасти вследствие нагрузок, действующих в плоскости вращения. Осевой шарнир применяется для управления - циклического изменения угла установки лопасти - для управления летательным аппаратом в каналах крена и тангажа, а также изменения угла установки всех лопастей на одинаковую величину, т.е. управления общим шагом. К осевым шарнирам присоединены поводки управления углами установки лопастей.
К недостаткам несущего винта с шарнирным креплением лопастей относятся:
- Конструктивная сложность из-за наличия трех шарниров у каждой лопасти.
- Большие габаритные размеры втулки вследствие большой нагруженности вала, передающего одновременно подъемную силу фюзеляжу и крутящий момент от силовой установки к несущему винту. Кроме того, большие размеры обусловлены наличием шарниров. Большие габаритные размеры влекут за собой рост вредного аэродинамического сопротивления.
- Необходимость тщательной регулировки шарнирных соединений, в частности вертикальных шарниров, для исключения явления «земного резонанса».
Несущий винт с гибким креплением лопастей [Патент US 3880551. A Rotary head assembly for rotary wing aircraft] состоит из двух лопастей, соединенных между собой при помощи гибкой балки, установленной на валу втулки. Несущая балка обладает низкой жесткостью на кручение, что позволяет управлять углом установки лопастей с целью осуществления управления общим и циклическим шагом. К недостаткам такого несущего винта относятся:
- Большие переменные изгибающие моменты и поперечные силы, действующие на балку, как в плоскости вращения, так и в плоскости взмаха, обусловленные нагрузками обеих лопастей.
- Противоречивость требований обеспечения прочности и гибкости балки. Так, увеличение длины балки с целью снижения ее изгибной жесткости влечет за собой рост переменных нагрузок на нее. Уменьшение строительной высоты и увеличение ширины балки, необходимые для обеспечения гибкости на кручение, приводят к росту опасности местной потери устойчивости балки из-за изгибающих моментов в плоскости вращения.
- Большая нагруженность вала втулки, передающего одновременно подъемную силу и крутящий момент.
Несущий винт с шариковой передачей [Патент WO 2005082116 А2. Rotor Head For A Rotary-Wing Aircraft] имеет сферической тело, жестко связанное с валом втулки. Передача крутящего момента от вала втулки к лопастям происходит при помощи шариков, установленных в пазы сферического тела и контактирующих с пазами ответной детали отклоняемой части втулки, к которой крепятся лопасти. Причем пазы ответной детали позволяют шарикам перемещаться вдоль них. При этом наклон плоскости вращения, необходимый для управления циклическим шагом, осуществляется посредством взаимного скольжения соответствующих сферических поверхностей.
Недостатки данной конструкции таковы:
- Большие контактные напряжения в шариковой передаче требуют применения для ответной детали отклоняющейся части втулки материала с большим значением прочности на сжатие, т.е. непластичного материала. Непластичные материалы обладают низким значением вязкости разрушения, поэтому условия работы несущего винта (вибрация и ударные нагрузки) негативно влияют на прочность и долговечность указанной детали.
- Сферическое тело и вал втулки являются сильно нагруженными деталями, поскольку передают как подъемную силу, так и крутящий момент.
- Конструкция несущего винта предполагает произвольное число лопастей, поэтому проблема компенсации моментов, вызываемых маховым движением лопастей, требует отдельного технического решения, усложняющего несущий винт, поскольку имеющийся в конструкции универсальный шарнир используется только для отклонения плоскости вращения как результат управляющих воздействий.
Несущий винт с U-образными пружинами и диском с упругой диафрагмой [Патент US 4566856. A Helicopter gimbal rotor] содержит вращающийся вал, к которому в нижней части прикреплен диск, имеющий связь с лопастями через упругую диафрагму. Данный диск передает крутящий момент от вала к лопастям, позволяя последним изгибаться в плоскости взмаха. Изгибающие моменты, порождаемые взмахом лопастей, замыкаются на U-образных пружинах, установленных в верхней части втулки, закрепленных на вращающемся валу. Лопасти крепятся к валу при помощи сферических эластомерных подшипников.
Недостатки данной конструкции:
- Сложность конструктивного исполнения как втулки в целом, так и отдельных ее элементов, в частности диска с упругой диафрагмой.
- Сложность передачи больших крутящих моментов диском с упругой диафрагмой.
- Противоречивость требования гибкости и устойчивости U-образной пружины.
Несущий винт с упругим стержнем [Патент US 3637322 A. Rotor Head For A Helicopter] содержит пустотелую колонку, деталь с внешней сферической поверхностью, закрепленную на колонке, упругий стержень, установленный в колонке, деталь с внутренней сферической поверхностью, к которой крепятся лопасти, соединенную с одним из концов упомянутого упругого стержня, другой конец которого закреплен для предотвращения вращения, и опору стержня на колонке, имеющую возможность перемещения вдоль оси втулки, являющуюся скользящей втулкой, содержащей сферический подшипник для ориентирования упругого стержня.
Недостатки несущего винта с упругим стержнем:
- Сложность обеспечения прочности пустотелой детали с внешней сферической поверхностью, передающей крутящий момент от силовой установки к лопастям.
- Зависимость гибкости стержня от подъемной силы летательного аппарата требует установки дополнительной скользящей опоры стержня, усложняющей конструкцию и эксплуатацию несущего винта.
- Растягиваемый упругий стержень имеет также переменную жесткость в зависимости от азимутального положения лопастей, поскольку несущий винт, работающий в режиме косой обдувки, генерирует переменную составляющую подъемной силы, растягивающую стержень.
Несущий винт [Патент ЕР 449531 A1. Rotors] имеет втулку, поддерживающую произвольное количество радиально расположенных лопастей для вращения относительно ее оси и включающую в себя внутренний ведущий вал, вращательно закрепленный одним концом на одном из концов внешнего ведущего вала, упомянутый внутренний ведущий вал имеет произвольное количество ведущих штифтов, расположенных на равном расстоянии, причем указанный внутренний ведущий вал имеет не менее трех ведущих штифтов, расположенных радиально от оси вращения в плоскости вращения и перпендикулярных данной оси, каждый ведущий штифт размещен в узле эластомерного подшипника, имеющего сферический эластомерный подшипник, отцентрированный на ведущем штифте, и эластомерный сдвижной подшипник, размещенный в плоскости вращения и ориентированный параллельно оси вращения; сферический корпус, присоединенный к эластомерным сдвижным подшипникам и поддерживающий скобу несущего винта для крепления лопастей; сферический эластомерный тяговый подшипник, присоединенный к сферическому корпусу и имеющий геометрический центр на пересечении оси вращения и плоскости вращения внутреннего ведущего вала, при помощи которого несущий винт может быть отклонен в любом направлении относительно указанного центра. Внутренний ведущий вал расположен концентрично и внутри внешнего ведущего вала, и конец внутреннего ведущего вала соединен с концом внешнего ведущего вала при помощи гибкого сопряжения, способного передавать крутящий момент и обеспечивать ограниченное относительное осевое перемещение. Упомянутое гибкое сопряжение заключает в себя соприкасающиеся осевые сплайны.
К недостаткам данного типа несущего винта следует отнести сложность конструкции и эксплуатации втулки, содержащей большое количество эластомерных подшипников. Кроме того, проблема восприятия переменных составляющих нагрузок в плоскости взмаха требует отдельного решения, усложняющего конструкцию несущего винта.
Карданный несущий винт [Патент RU 2281885 С1. Несущий винт] выбран в качестве прототипа предлагаемого несущего винта. Несущий винт содержит вращающийся наружный корпус с зубчатым колесом и карданной рамкой. Невращающийся внутренний вал связан с наружным валом через подшипники. Рычаги поворота лопастей соединены с втулкой через оси и элементы крепления с осевыми шарнирами. Элементы крепления выполнены в виде скоб, к которым присоединены лопасти. Втулка снабжена карданной рамкой и двумя балками с упругими консольными частями, связанными между собой пальцами. На сферических подшипниках под углом конусности к плоскости вращения закреплены скобы, имеющие возможность поворота в подшипниках. Балки шарнирно соединены с вращающимся наружным корпусом втулки карданной рамки, расположенной над корпусом качалки; оси карданной рамки взаимно перпендикулярны, а точка пересечения осей расположена на оси вращения втулки, причем ось рамки, лежащая в плоскости взмаха, является осью общего осевого шарнира, а ось рамки, перпендикулярная плоскости взмаха, является осью общего горизонтального шарнира.
Недостатки данной втулки:
- Большая нагруженность карданного шарнира, передающего крутящий момент и подъемную силу. В особенно тяжелых условиях находятся консольные части карданной рамки, как правило, имеющие концентрацию напряжений в месте перехода к основному телу рамки.
- Большие переменные изгибающие моменты и поперечные силы, действующие на балку, как в плоскости вращения, так и в плоскости взмаха, обусловленные нагрузками обеих лопастей.
- Противоречивость требований обеспечения прочности и гибкости балки. Так, увеличение длины балки с целью снижения ее изгибной жесткости влечет за собой рост переменных нагрузок на нее.
Раскрытие изобретения
Технической задачей, решаемой изобретением, является упрощение конструкции несущего винта, снижение нагрузок на элементы его втулки и повышение ресурса.
Для достижения поставленной технической задачи предлагается несущий винт, содержащий неподвижный корпус. Один конец неподвижного корпуса прикреплен к конструкции летательного аппарата посредством фланцевого соединения. Неподвижный корпус связан при помощи радиально-упорных подшипников с расположенным внутри него вращающимся нижним валом. Нижний вал в своей верхней части имеет головку с внешней и внутренней сферическими поверхностями. Указанные сферические поверхности вступают в контакт с соответствующими сферическими поверхностями охватывающего промежуточного вала, имеющего внутреннюю сферическую поверхность в своей нижней части, и верхнего вала, имеющего в своей нижней части внешнюю сферическую поверхность. Промежуточный вал связан в своей верхней части с верхним валом при помощи соединения, способного передавать крутящий момент. Внутренняя часть верхнего вала соединяется с гибким валом при помощи соединения, обеспечивающего передачу крутящего момента и осевую фиксацию. В своей нижней части гибкий вал связан с нижним валом посредством соединения, обеспечивающего передачу крутящего момента и возможность взаимного осевого перемещения. К промежуточному валу посредством осевых шарниров прикреплены лопасти. Оси осевых шарниров отклонены на угол конусности от плоскости вращения. Линия, образованная точками пересечением осей осевых шарниров с плоскостью вращения, расположена ниже центра универсального шарнира, образованного сферическими поверхностями верхнего, промежуточного и нижнего валов. Осевые шарниры лопастей связаны поводками с тягами проводки системы управления. Наконечники тяг имеют сферические подшипники. Центры указанных сферических подшипников располагаются на линии, параллельной линии, образованной точками пересечением продольных осей осевых шарниров с плоскостью вращения, и лежащей в плоскости, содержащей центр универсального шарнира, для наивыгоднейшего угла общего шага лопастей.
Отличительные признаки предлагаемого несущего винта: универсальный шарнир выполнен в виде вращающихся нижнего, промежуточного, верхнего валов и гибкого вала, проходящего внутри упомянутых валов. Нижний вал в своей верхней части имеет головку с внешней и внутренней сферическими поверхностями, вступающими в контакт с соответствующими сферическими поверхностями охватывающего промежуточного вала, имеющего внутреннюю сферическую поверхность в своей нижней части, и верхнего вала, имеющего в своей нижней части внешнюю сферическую поверхность. Промежуточный вал связан в своей верхней части с верхним валом при помощи соединения, способного передавать крутящий момент. Внутренняя часть верхнего вала соединяется с гибким валом, расположенным в центральной части втулки, при помощи соединения, обеспечивающего передачу крутящего момента и осевую фиксацию. В своей нижней части гибкий вал связан с нижним валом посредством соединения, обеспечивающего передачу крутящего момента и возможность взаимного осевого перемещения.
Благодаря наличию этих признаков в совокупности обеспечивается получение следующего технического результата - упрощение конструкции несущего винта, снижение нагрузок на элементы втулки несущего винта, повышение ресурса.
Краткое описание чертежей
Фиг.1 - схематичное изображение предлагаемого несущего винта в изометрической проекции с разрезом.
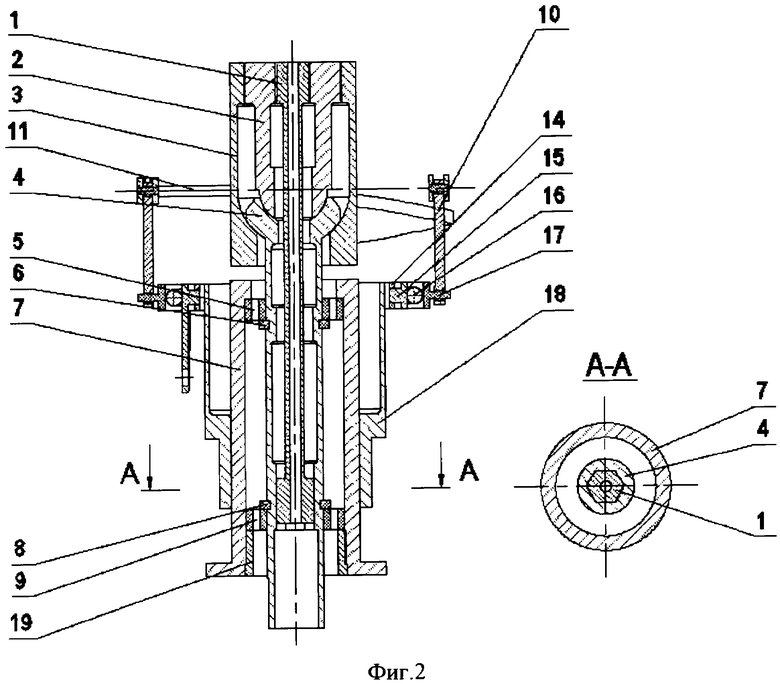
Фиг.2 - схематичное изображение предлагаемого несущего винта в разрезе по плоскости, содержащей ось вращения втулки.
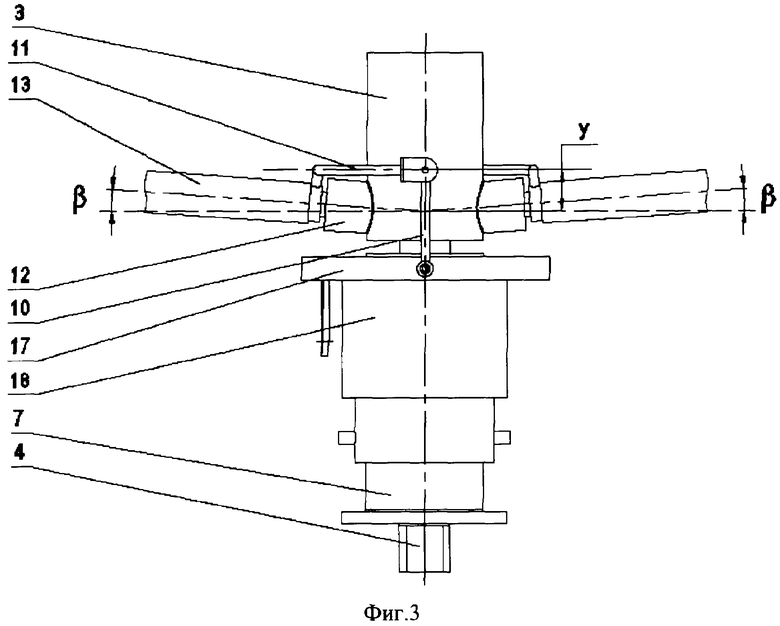
Фиг.3 - схематичное изображение предлагаемого несущего винта в основной проекции.
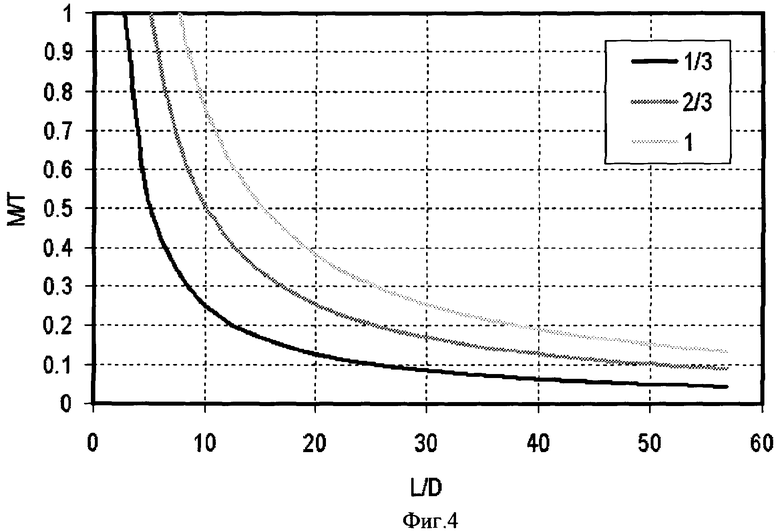
Фиг.4 - типовая зависимость нормированного изгибающего момента от удлинения вала для трех значений приведенного угла наклона универсального шарнира.
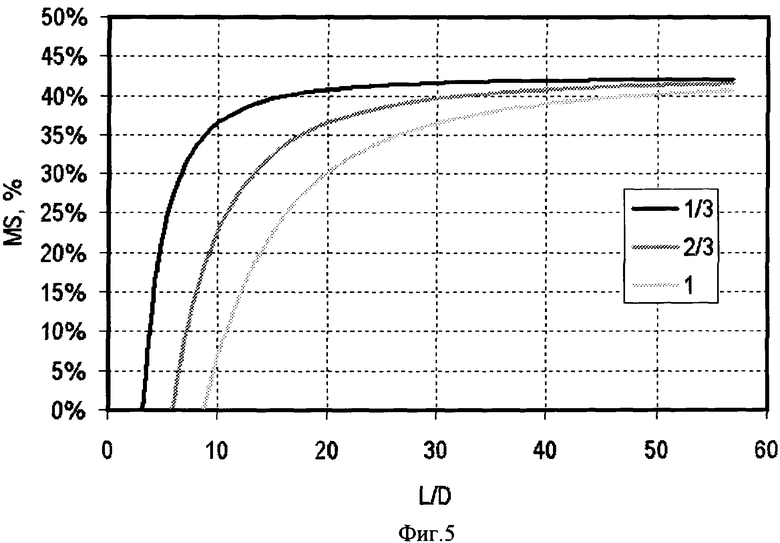
Фиг.5 - типовая зависимость запаса прочности упругого вала от удлинения вала для трех значений приведенного угла наклона универсального шарнира.
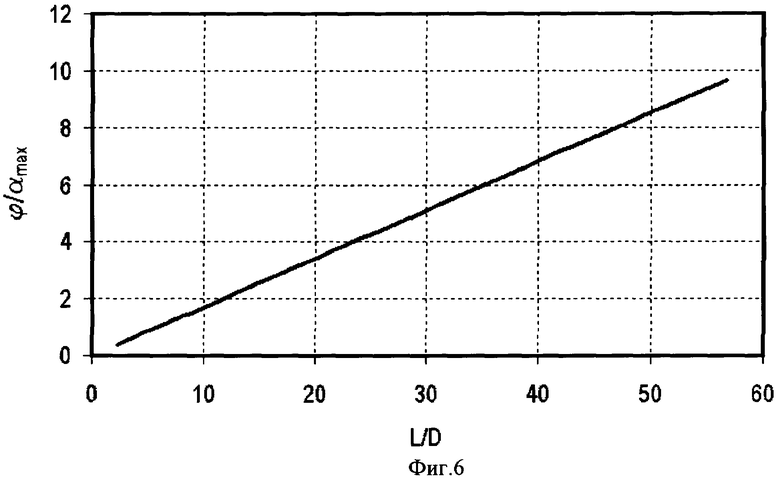
Фиг.6 - типовая зависимость отношения наибольшего угла относительного поворота валов к наибольшему углу наклона универсального шарнира от удлинения вала.
Фиг.7 - типовая зависимость собственной крутильной частоты, нормированной к угловой частоте вращения несущего винта, от удлинения вала.
Фиг.8 - типовая зависимость собственных частот изгибных колебаний вала первых трех тонов, нормированных к удвоенной частоте вращения несущего винта, от удлинения вала.
Фиг.9 - типовая зависимость частоты первого тона собственных колебаний гибкого вала, нормированной к частотам наиболее значимых гармоник, от удлинения вала.
Осуществление изобретения
Несущий винт содержит неподвижный корпус 7, фланец которого крепится на конструкции летательного аппарата. При помощи двух радиально-упорных подшипников 5 и 9 на неподвижном корпусе 7 устанавливается вращающийся нижний вал 4. Осевое перемещение вала 4 относительно корпуса 7 ограничено при помощи колец 6 и 8, фланца в верхней части корпуса 7 и гайки 19, привинчиваемой к нижней части корпуса 7. В своей верхней части нижний вал 4 имеет головку с двумя сферическими поверхностями - внешней и внутренней, имеющими один общий геометрический центр. При помощи внешней сферической поверхности нижний вал 4 взаимодействует с промежуточным валом 3, имеющим ответную внутреннюю сферическую поверхность. Посредством внутренней сферической поверхности вал 4 контактирует с верхним валом 2, имеющим ответную внешнюю сферическую поверхность. Валы 2 и 3 связаны между собой при помощи соединения, способного передавать крутящий момент, к примеру резьбовым соединением с предварительным натягом. Внутренняя часть верхнего вала 2 соединяется с гибким валом 1 при помощи соединения, обеспечивающего передачу крутящего момента и осевую фиксацию, например резьбовым соединением с предварительным натягом. Гибкий вал представляет собой длинный вал, выполненный из материала с относительно большим значением величины приведенной прочности σ02/Е, где σ02 - предел текучести материала при растяжении, Е - модуль Юнга. В своей нижней части гибкий вал 1 связан с нижним валом 4 посредством соединения, обеспечивающего передачу крутящего момента и возможность взаимного осевого перемещения, например, при помощи плоских поверхностей, формирующих фигуру внешнего контура гибкого вала 1 в виде многоугольника. Таким образом, верхний вал 2, промежуточный вал 3, нижний вал 4 и гибкий вал 1 формируют универсальный шарнир, позволяющий передавать осевую силу в двух противоположных направлениях и крутящий момент с возможностью совершать ограниченные угловые перемещения относительно двух взаимно перпендикулярных осей, лежащих в плоскости, перпендикулярной плоскости вращения. При этом свобода вращения ограничивается гибкостью вала 1. Для исключения контакта между внешней поверхностью гибкого вала 1 при его изгибе и внутренними поверхностями валов 2 и 4 между соответствующими поверхностями выполнен определенный зазор. На промежуточном валу 3 через осевые шарниры 12 закреплены две лопасти 13. Лопасти 13 связаны посредством поводков 11 с тягами 10, которые используются для управления летательным аппаратом в каналах циклического и общего шага. Тяги 10 имеют сферические подшипники в наконечниках. Для целей управления, включающего наклон плоскости вращения несущего винта в желаемом направлении и изменение углов установки лопастей, могут использоваться известные технические решения, как, например, автомат перекоса Б.Н.Юрьева [Миртов К.Д., Черненко Ж.С. Конструкция и прочность самолетов и вертолетов. - М.: Транспорт, 1972. - 440 с.], схематично изображенный на Фиг.1-3, включающий кольца 14, 15, 17, шарики 16 и ползун 18. Осевые шарниры 12 с лопастями 13 установлены под определенным углом конусности β к плоскости вращения несущего винта (см. Фиг.3) с целью уменьшения действующих в комлевых частях лопастей 13 изгибающих моментов. Линия, образованная точками пересечением продольных осей лопастей с плоскостью вращения, расположена ниже центра универсального шарнира, образованного сферическими поверхностями валов 2, 3 и 4, на определенном расстоянии у для уменьшения уровня вибрации летательного аппарата, обусловленной нагрузками, передаваемыми с несущего винта. Для уменьшения влияния махового движения лопастей на нагрузки, передаваемые в проводку системы управления, центры сферических подшипников тяг 10 располагаются на линии, параллельной линии, образованной точками пересечением продольных осей лопастей с плоскостью вращения, и лежащей в плоскости, содержащей центр универсального шарнира, для наивыгоднейшего угла общего шага лопастей.
При работе несущего винта крутящий момент от силовой установки летательного аппарата к лопастям 13 передается через нижний вал 4, гибкий вал 1, верхний вал 2, промежуточный вал 3 и осевые шарниры 12. Положительная аэродинамическая сила передается от лопастей 13 к корпусу летательного аппарата через осевые шарниры 12, промежуточный вал 3 и нижний вал 4 в соответствующей нижней контактирующей паре сферических поверхностей, подшипники 5, 9 с кольцами 6, 8 и неподвижный корпус 7. Отрицательная аэродинамическая сила передается от лопастей 13 к корпусу летательного аппарата через осевые шарниры 12, промежуточный вал 3 и верхний вал 2 в соответствующей верхней контактирующей паре сферических поверхностей, подшипники 5, 9 с кольцами 6, 8 и неподвижный корпус 7. При взмахе лопасти 13 придают угловое перемещение промежуточному валу 3 с осевыми шарнирами 12, который, в свою очередь, поворачивает верхний вал 2, нагружающий гибкий вал 4 сосредоточенным моментом. При этом происходит относительное перемещение сферических поверхностей валов 2, 3 и 4. Кроме того, имеет место относительное осевое вращение сферических поверхностей, вызванное переменными нагрузками в плоскости вращения и нежесткостью гибкого вала на кручение. Как правило, указанные перемещения невелики. Рассматриваемый шарнирный узел может как обеспечиваться смазкой, так и содержать промежуточные кольца между сферическими поверхностями, выполненными из самосмазывающихся материалов. Управление общим шагом происходит за счет поступательного перемещения тяг 10 вдоль оси корпуса 7, приводящего к повороту лопастей в осевых шарнирах, связанных с тягами 10 поводками 11, на одинаковый угол. Наклон тарелки автомата перекоса в требуемом азимутальном положении приводит к периодическому возвратно-поступательному движению вращающихся тяг лопастей 10 вдоль оси вращения, в результате чего происходит наклон плоскости вращения лопастей, сопровождающийся периодической изгибной деформацией гибкого вала 1.
Сечение гладкой части вала 1 подбирается из условия прочности при передаче крутящего момента и изгибающего момента, обусловленного маховым движением лопастей и управлением. Так, условие статической прочности может быть записано в виде
σeqν≤[σ],
где эквивалентное нормальное напряжение σeqν в соответствии с теорией прочности Генки-Мизеса определяется по формуле
 ;
;
[σ] - допускаемое напряжение, как правило, предел текучести материала σ02, разделенный на нормированную величину коэффициента запаса прочности;
σ - максимальное значение нормального напряжения, при чистом изгибе определяется соотношением
 ,
,
 - изгибающий момент;
- изгибающий момент;
 - момент сопротивления изгибу сечения;
- момент сопротивления изгибу сечения;
Е - модуль Юнга;
 - момент инерции сечения при изгибе;
- момент инерции сечения при изгибе;
R=L/α - радиус кривизны вала;
L - длина вала;
α - геометрическая сумма углов взмаха и управления;
D, d - соответственно внешний и внутренний диаметр вала;
τ - максимальное значение касательного напряжения при кручении, которое оценивается по формуле
 ,
,
Т - крутящий момент;
 - полярный момент инерции сечения.
- полярный момент инерции сечения.
Максимальный угол поворота верхнего и промежуточного валов относительно нижнего вала зависит от передаваемого крутящего момента Т и жесткости упругого вала
 ,
,
где  - модуль упругости материала на сдвиг;
- модуль упругости материала на сдвиг;
μ - коэффициент Пуассона.
Круговая частота собственных колебаний упругого вала на кручение определяется соотношением
 ,
,
где  - жесткость вала на кручение;
- жесткость вала на кручение;
Jm - суммарный массовый момент инерции вращающейся части несущего винта. Частоты изгибных колебаний гибкого вала оцениваются по формуле
 ,
,
где λn - безразмерный коэффициент, зависящий от формы колебаний;
 - масса гибкого вала.
- масса гибкого вала.
Анализ представленных соотношений показывает, что основной принцип, положенный в конструкцию предлагаемого несущего винта, заключается в возможности уменьшения изгибающего момента при сохранении практически постоянной несущей способности вала на кручение с увеличением его длины. Уменьшение изгибающего момента позволяет расширить возможности несущего винта за счет увеличения углов отклонения в универсальном шарнире.
Для иллюстрации данного эффекта на фиг.4-5 приведены результаты расчета для типового несущего винта легкого вертолета, имеющего гибкий вал, выполненный из материала с величиной σ02/E=0.0085 (титановый сплав). На фиг.4 и 5 представлены соответственно зависимости нормированного изгибающего момента М/Т и запаса прочности MS=(σ02/σeqν-1)·100% от удлинения вала L/D для трех значений приведенного угла  (равного 1/3, 2/3 и 1), где αmax - максимальный угол, определяемый ограничителем. Из графиков следует, что увеличение длины гибкого вала приводит к снижению изгибающего момента и росту запаса прочности. Кроме того, существует некоторое оптимальное значение длины, при котором дальнейшее ее увеличение влечет за собой лишь незначительное изменение изгибающего момента и запаса прочности. Фиг.4 также иллюстрирует влияние длины вала на соотношение между постоянной и переменной частью нагрузок на вал. Как видно из графиков, увеличение длины приводит к снижению доли переменной части. Следовательно, с ростом длины гибкого вала улучшатся как условия статической, так и условия усталостной прочности втулки.
(равного 1/3, 2/3 и 1), где αmax - максимальный угол, определяемый ограничителем. Из графиков следует, что увеличение длины гибкого вала приводит к снижению изгибающего момента и росту запаса прочности. Кроме того, существует некоторое оптимальное значение длины, при котором дальнейшее ее увеличение влечет за собой лишь незначительное изменение изгибающего момента и запаса прочности. Фиг.4 также иллюстрирует влияние длины вала на соотношение между постоянной и переменной частью нагрузок на вал. Как видно из графиков, увеличение длины приводит к снижению доли переменной части. Следовательно, с ростом длины гибкого вала улучшатся как условия статической, так и условия усталостной прочности втулки.
На фиг.6 представлен характер зависимости отношения наибольшего угла относительного поворота валов к наибольшему углу наклона универсального шарнира ϕ/αmax от удлинения вала L/D. Фиг.7 характеризует изменение собственной крутильной частоты от длины гибкого вала. Здесь ω - рабочая угловая частота вращения несущего винта. Из графиков следует, что с ростом длины вала углы относительного поворота валов растут, кроме того, увеличивается запас по крутильному резонансу.
На изгибные колебания гибкого вала влияют нагрузки в плоскости взмаха, частоты которых кратны двум частотам вращения несущего винта с двумя лопастями. На фиг.8 показана зависимость собственных частот колебаний вала первых трех тонов, нормированных к удвоенной частоте вращения несущего винта ω, от величины L/D. Фиг.9 иллюстрирует зависимость частоты первого тона собственных колебаний гибкого вала, нормированной к частотам наиболее значимых гармоник (2, 4, 6 и 8), от удлинения L/D. Согласно графикам, конструкторским изменением длины гибкого вала можно регулировать запас по изгибному резонансу.
Таким образом, применительно к конкретным конструкциям несущего винта можно подобрать оптимальные сечение и длину гибкого вала, при которых наблюдается компромисс между статической и усталостной прочностью вала, потребных для его изгиба нагрузках, с одной стороны, и отсутствием резонансов и приемлемой величиной относительного поворота валов универсального шарнира, с другой.
Поскольку вследствие разделения путей передачи нагрузки крутящий момент передается гибким валом 1, области валов 2, 3 и 4, формирующие своими сферическими поверхностями универсальный шарнир, работают в довольно простых с точки зрения нагрузки условиях - осевое растяжение сжатие и относительно небольшая поперечная компонента силы, вызванная отклонением плоскости вращения. Это позволяет обеспечить прочность указанных валов при сравнительно небольших размерах.
Таким образом, предлагаемый несущий винт имеет простую конструкцию, низкий уровень нагрузок на элементы втулки, повышенный ресурс.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ СКЛАДЫВАНИЯ ЛОПАСТЕЙ | 2009 |
|
RU2410287C1 |
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ СКЛАДЫВАНИЯ ЛОПАСТЕЙ | 2013 |
|
RU2519579C1 |
| СПОСОБ СОЗДАНИЯ ТЯГИ И СИЛОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2680214C1 |
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523723C1 |
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ СКЛАДЫВАНИЯ ЛОПАСТЕЙ | 2008 |
|
RU2376201C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2017 |
|
RU2668482C1 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| ВТУЛКА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2007 |
|
RU2363620C2 |

Изобретение относится к авиации, в частности к несущим винтам. Несущий винт содержит неподвижный корпус (7), связанный посредством подшипников (5), (9) с нижним валом (4). Нижний вал (4) имеет сферические поверхности, вступающие в контакт с соответствующими сферическими поверхностями промежуточного (3) и верхнего (2) валов. Промежуточный (3) и верхний (2) валы связаны соединением, передающим вращение. Верхний (2) и гибкий (1) валы связаны передающим вращение соединением с осевой фиксацией. Гибкий (1) и нижний (4) валы связаны передающим вращение соединением с возможностью взаимного осевого перемещения. К промежуточному валу (3) прикреплены лопасти (13) с осевыми шарнирами (12). Оси шарниров (12) отклонены на угол конусности от плоскости вращения. Осевые шарниры (12) связаны поводками (11) с тягами (10) управления. Изобретение упрощает конструкцию несущего винта, снижает нагрузки на элементы втулки несущего винта, повышает ресурс. 9 ил.
Несущий винт, содержащий неподвижный корпус, один конец которого прикреплен к конструкции летательного аппарата, связанный при помощи подшипников с универсальным шарниром, к которому посредством осевых шарниров прикреплены лопасти, оси осевых шарниров отклонены на угол конусности от плоскости вращения, линия, образованная точками пересечения осей осевых шарниров с плоскостью вращения, расположена ниже центра универсального шарнира, осевые шарниры лопастей связаны поводками с тягами проводки системы управления, наконечники тяг имеют сферические подшипники, центры сферических подшипников располагаются на линии, параллельной линии, образованной точками пересечения продольных осей осевых шарниров с плоскостью вращения, и лежащей в плоскости, содержащей центр универсального шарнира, отличающийся тем, что универсальный шарнир выполнен в виде вращающихся нижнего, промежуточного, верхнего валов и гибкого вала, проходящего внутри упомянутых валов, нижний вал в своей верхней части имеет головку с внешней и внутренней сферическими поверхностями, вступающими в контакт с соответствующими сферическими поверхностями охватывающего промежуточного вала, имеющего внутреннюю сферическую поверхность в своей нижней части, и верхнего вала, имеющего в своей нижней части внешнюю сферическую поверхность, промежуточный вал связан в своей верхней части с верхним валом при помощи соединения, способного передавать крутящий момент, внутренняя часть верхнего вала соединяется с гибким валом при помощи соединения, обеспечивающего передачу крутящего момента и осевую фиксацию, в своей нижней части гибкий вал связан с нижним валом посредством соединения, обеспечивающего передачу крутящего момента и возможность взаимного осевого перемещения, лопасти посредством осевых шарниров крепятся к промежуточному валу.
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| IT 1240177 В, 27.11.1993 | |||
| УСТРОЙСТВО СВЯЗИ И СПОСОБ ОБХОДА БРАНДМАУЭРА ШЛЮЗА УРОВНЯ ПРИЛОЖЕНИЯ ПРИ УСТАНОВЛЕНИИ RTC-СОЕДИНЕНИЯ СВЯЗИ МЕЖДУ RTC-КЛИЕНТОМ И RTC-СЕРВЕРОМ | 2015 |
|
RU2660620C1 |
| US 4566856 A1, 28.01.1986. | |||

