Изобретение относится к авиации и может быть использовано в любом виде техники, где применяются аэродинамический принцип движения и пространственного управления аппаратом с использованием несущего винта.
Известны следующие основные схемы несущих винтов, близкие по конструкции и принципиальным решениям к описываемому изобретению.
Несущий винт с втулкой Юнга [Братухин И.П. Проектирование и конструкции вертолетов. - М.: Государственное издательство оборонной промышленности, 1955, - 357 с.] состоит из вала с закрепленным на нем карданом. Одна из осей кардана представляет собой общий горизонтальный шарнир двух лопастей, которые присоединены к втулке посредством качалки и осевых шарниров. Эта ось позволяет лопастям осуществлять совместное маховое движение. Вторая ось кардана представляет собой общий осевой шарнир лопастей, в котором, посредством изменения угла наклона кардана с качалкой и лопастей относительно корпуса летательного аппарата, происходит управление несущим винтом. Осевые шарниры лопастей предназначены для изменения угла общего шага лопастей. К осевым шарнирам присоединены поводки управления углами установки лопастей, связанные с внешним автоматом перекоса. Втулка не имеет индивидуальных горизонтальных и вертикальных шарниров лопастей.
К недостаткам несущего винта с втулкой Юнга относятся:
- большие габаритные размеры, вызванные внешним расположением автомата перекоса, приводящие к большому вредному сопротивлению втулки;
- незащищенность деталей автомата перекоса от абразивного износа в виду внешнего расположения;
- наличие подвижных нагруженных сочленений автомата перекоса, имеющих пониженный ресурс;
- повышенные требования к точности изготовления подшипников тарелок автомата перекоса;
- большой вес автомата перекоса;
- высокий уровень нагруженности качалки.
Несущий винт с втулкой Хафнера (типа «паук») [Жабров А. Автожир и геликоптер. - М.: Издательство ОСОАВАИХИМА СССР, 1939, - 240 с.] состоит из вращающегося вала, установленного на подшипниках, присоединенных к невращающемуся валу, внутри которого проходит рычажный механизм управления, состоящий из ведомого и ведущего рычагов. Ведомая ось рычажного механизма через подшипник связана «пауком» с поводками лопастей, присоединяемых к осевым шарнирам. Подвеска каждой лопасти к втулке имеет горизонтальный шарнир для осуществления махового движения и вертикальный шарнир для осуществления качательного движения в плоскости вращения. Управление циклическим шагом осуществляется изменением угла установки лопастей в осевых шарнирах при соответствующих азимутальных положениях, которое осуществляется наклоном ведомой оси рычажного механизма, паука и поводков лопастей. Таким образом, при изменении наклона ведомой оси плоскость постоянных углов установки несущего винта меняет свое угловое положение относительно корпуса летательного аппарата, при этом лопасти совершают периодическое движение в осевых шарнирах. Управление углом общего шага лопастей осуществляется перемещением рычажного механизма вдоль вертикальной оси втулки, при этом лопасти, связанные с механизмом, изменяют углы установки на одинаковую величину. К недостаткам несущего винта с втулкой Хафнера относятся:
- сложность конструкции, обусловленная большим количеством шарниров лопастей;
- сложный характер нагружения втулки вследствие наличия периодических движений каждой лопасти в осевом, горизонтальном и вертикальном шарнирах, неблагоприятно влияющий на ресурс втулки;
- необходимость разработки дополнительных средств борьбы с земным резонансом из-за периодического движения лопастей в вертикальных шарнирах.
Несущий винт с втулкой вертолета R-22 [Чижов Н.Т. Легкие вертолеты и автожиры. Техническая информация ЦАГИ, № 18 (1664), 09.1991. С.9-24], предназначенной для двухлопастного несущего винта, включает в себя вращающийся вал, на котором подвешена через общий горизонтальный шарнир качалка, имеющая два индивидуальных горизонтальных шарнира лопастей. К качалке крепятся осевые шарниры, которые при помощи тяг связаны с вращающейся наклонной тарелкой автомата перекоса, позволяющего изменять углы циклического и общего шага лопастей. Маховые движения совершаются как в общем, так и в индивидуальных горизонтальных шарнирах.
К недостаткам несущего винта с втулкой вертолета R-22 относятся:
- высокая нагруженность осевых шарниров, в которых осуществляется циклическое движение лопастей;
- наличие внешнего автомата перекоса, приводящего к увеличению размеров втулки и вредного аэродинамического сопротивления летательного аппарата;
- незащищенность деталей автомата перекоса от абразивного износа в виду внешнего расположения;
- наличие подвижных нагруженных сочленений автомата перекоса, имеющих пониженный ресурс;
- повышенные требования к точности изготовления подшипников тарелок автомата перекоса;
- большой вес автомата перекоса.
Наиболее близким техническим решением, выбранным за прототип, является несущий винт с втулкой автожира А-002 [Патент РФ №2235662, приоритет 12.08.2002 г., МПК 7 В 64 С 27/48]. Втулка несущего винта содержит вращающийся наружный корпус с зубчатым колесом предварительной раскрутки, невращающийся внутренний вал, внутри которого расположен рычажный механизм управления для наклона оси и перемещения в вертикальном направлении соединенного с ним вращающегося устройства, установленного на механизм управления и связанного с рычагами поворота лопастей, соединенными с втулкой через элемент крепления с осевым шарниром. Причем вращающееся устройство выполнено в виде коромысла, элемент крепления выполнен в виде скобы. Втулка снабжена карданной рамкой и корпусом качалки, соединенным с каждой из двух лопастей через скобу. Осевой шарнир выполнен в виде пальца, установленного в корпусе качалки под конструктивным углом конусности к плоскости вращения, на консольные части которого установлена скоба с опорой упорного подшипника с возможностью поворота относительно оси пальца и соединенная с корпусом качалки через опору с упорным подшипником. При этом корпус качалки шарнирно соединен с вращающимся наружным корпусом втулки карданной рамкой, расположенной над корпусом качалки, оси карданной рамки взаимно перпендикулярны, а точка пересечения осей расположена на оси вращения втулки, причем ось рамки, параллельная оси лопастей, является осью общего осевого шарнира, а ось рамки, перпендикулярная оси лопастей, совмещена с осью, соединяющей коромысло с рычагами поворота лопастей на одном из углов установки лопастей и является осью общего горизонтального шарнира. Механизм управления выполнен с тремя раздельными тягами.
Недостатком несущего винта с втулкой автожира А-002 является большой уровень нагруженности качалки со скобами, вследствие чего ограничена возможность ее использования в авторотирующих несущих винтах с изменяемым углом общего шага, характеризующихся широким диапазоном значений угловой скорости вращения и, соответственно, значений изгибающего момента в плоскости взмаха.
Технической задачей, решаемой предлагаемым несущим винтом, является снижение уровня нагруженности втулки, позволяющее увеличить многорежимность ее эксплуатации в качестве составной части авторотирующего несущего винта и повысить ее ресурс.
Для достижения поставленной технической задачи предлагается несущий винт, содержащий вращающийся наружный корпус с зубчатым колесом предварительной раскрутки и карданной рамкой, невращающийся внутренний вал, связанный с наружным валом через подшипники; внутри невращающегося вала расположен рычажный механизм управления, предназначенный для наклона оси и перемещения в вертикальном направлении соединенного с ним вращающегося устройства, установленного на механизм управления и связанного с рычагами поворота лопастей; рычаги поворота лопастей соединены с втулкой через оси и элементы крепления с осевыми шарнирами; элементы крепления выполнены в виде скоб, к которым присоединены лопасти; вращающееся устройство выполнено в виде коромысла; втулка снабжена карданной рамкой и двумя балками с упругими консольными частями, связанными между собой пальцами; жесткие центральные части балок связаны друг с другом при помощи пластин; каждый осевой шарнир выполнен в виде двух сферических подшипников, один из которых установлен на пальце, связывающем балки, а второй закреплен между пластинами; на сферических подшипниках под углом конусности к плоскости пластин закреплены скобы, имеющие возможность поворота в подшипниках, причем своей внутренней по отношению к втулке частью скобы установлены на сферические подшипники пластин посредством стержней, обеспечивающих возможность перемещения скоб вдоль осей стержней; балки шарнирно соединены с вращающимся наружным корпусом втулки карданной рамкой, расположенной над корпусом качалки; оси карданной рамки взаимно перпендикулярны, а точка пересечения осей расположена на оси вращения втулки, причем ось рамки, лежащая в плоскости взмаха, является осью общего осевого шарнира, а ось рамки, перпендикулярная плоскости взмаха, является осью общего горизонтального шарнира; механизм управления выполнен с тремя раздельными тягами.
Отличительными признаками предлагаемого несущего винта от несущего винта, выбранного в качестве прототипа, является то, что втулка снабжена двумя балками с упругими консольными частями, связанными между собой пальцами; жесткие центральные части балок присоединены друг к другу при помощи пластин; каждый осевой шарнир выполнен в виде двух сферических подшипников, один из которых установлен на пальце, связывающем балки, а второй закреплен между пластинами; на сферических подшипниках под углом конусности к плоскости пластин закреплены скобы, имеющие возможность поворота в подшипниках, причем своей внутренней по отношению к втулке частью скобы установлены на сферические подшипники пластин посредством стержней, обеспечивающих возможность перемещения скоб вдоль осей стержней; ось карданной рамки, лежащая в плоскости взмаха, является осью общего осевого шарнира, а ось рамки, перпендикулярная плоскости взмаха, является осью общего горизонтального шарнира.
Благодаря наличию этих признаков в совокупности с известными, предлагаемая конструкция втулки позволяет снизить уровень нагруженности и повысить ресурс втулки за счет разгрузки ее элементов от нагрузок с лопастей, обеспечивая восприятие больших значений изгибающих моментов в плоскости взмаха по сравнению с известными втулками.
На чертеже показан вид предлагаемого несущего винта в изометрической проекции с разрезом.
Несущий винт включает в себя невращающийся вал 1. Вал 1 через верхний 15 и нижний 16 подшипники соединяется с вращающимся валом 2, который имеет посадочные места для установки подшипников карданной рамки 3. Верхние части данных посадочных мест на валу после установки карданной рамки 3 по оси Z-Z закрываются крышками 22, присоединяемыми к валу 2. На второй оси карданной рамки Х-Х, перпендикулярной оси Z-Z, через проушины 23 навешиваются две балки 13, связанные между собой в середине при помощи пластин 21, а по жестким концам консольных частей - при помощи двух пальцев 20. Упругие консольные части балок отклонены на угол конусности относительно плоскости пластин 21. К пальцам 20 присоединены сферические подшипники 24, на которых устанавливаются жесткие скобы 12. К проушинам скоб на болтах крепятся лопасти несущего винта (не показаны). Эти проушины имеют одинаковый угол наклона относительно осей пальца 20, представляющий собой угол общего шага лопастей. Во внутренние по отношению к втулке несущего винта части скоб 12 закрепляются стержни 26, посредством которых скобы связаны со сферическими шарнирными узлами 7, закрепленными на пластинах 21. Осями 25 к скобам 12 крепятся рычаги поворота лопастей 6, соединяемые через подшипниковые узлы с коромыслом 8. Коромысло 8 установлено через подшипник 14 на ведомом рычаге 4 рычажного механизма управления. Рычажный механизм включает в себя ведомый 4 и ведущий 5 рычаги, установленные в ползуне 9 на сферических подшипниках. К нижней части ползуна 9 прикрепляется стакан 11, имеющий окна для выхода тяг управления по каналу тангажа 17 и крену 18, которые присоединены к нижней части ведущего рычага 5. Стакан 11 связан с качалкой общего шага 19. К нижней части вращающегося вала 2 присоединяется зубчатое колесо 10.
Несущий винт работает следующим образом. В результате взаимодействия с набегающим потоком воздуха лопасти, находящиеся в режиме авторотации, создают необходимую для полета летательного аппарата подъемную силу, а также передают вращение на вращающиеся элементы втулки - скобы 12, балки 13 с пластинами 21, рычаги поворота лопастей 6 с осями 25, коромысло 8 с подшипниками, проушины 23, карданную рамку 3 с подшипниками, вал 2 с зубчатым колесом 10 и внешние кольца подшипников 15 и 16. В режимах предварительной раскрутки несущего винта к зубчатому колесу 10 подается крутящий момент от двигателя, в результате чего происходит увеличение угловой скорости вращающихся деталей втулки и лопастей.
Совместное маховое движение лопастей несущего винта происходит в общем горизонтальном шарнире (ось Х-Х карданной рамки 3). Кроме того, каждая лопасть осуществляет собственное маховое движение в сферических шарнирных узлах 7, которое происходит за счет упругости консольных частей балок 13, и ограничивается величиной их деформации под нагрузкой.
Для управления пространственным положением летательного аппарата используется рычажный механизм управления. При изменении углового положения ведущего рычага 5 в своем сферическом подшипнике, закрепленном в ползуне 9, посредством тяг 17 или 18 происходит соответствующее - в канале тангажа или канале крена - изменение наклона ведомого рычага 4 относительно оси Y-Y. В результате изменяется угол наклона относительно вертикальной оси втулки Y-Y следующих вращающихся элементов: коромысла 8, рычагов поворота лопастей 6, скоб 12, балок 13, пластин 13, проушин 23, карданной рамки 3. Таким образом, происходит отклонение оси вращения лопастей и соответствующих деталей втулки относительно вертикальной оси втулки, т.е. изменение углового положения плоскости постоянных углов установки несущего винта относительно летательного аппарата. Это влечет за собой требуемое для управления изменение направления действия вектора аэродинамической силы несущего винта. При этом в процессе вращения втулки происходит циклическое движение вокруг оси Z-Z карданной рамки 3. Таким образом, при циклическом управлении втулкой движения в индивидуальных осевых шарнирах не происходят, что позволяет увеличить их ресурс, снизить массу.
Управление углом общего шага несущего винта осуществляется следующим образом. Качалка 19 задает перемещение стакана 11, ползуна 9 и, соответственно, рычагов 4 и 5 вдоль оси Y-Y. Вследствие этого перемещаются в вертикальном направлении коромысло 8 и рычаги поворота лопастей 6. Связанные с рычагами поворота лопастей скобы поворачиваются в подшипниковых узлах 24 и 7 относительно собственных продольных осей на один и тот же угол.
Основными силовыми элементами предлагаемого несущего винта являются балки 13 с пальцами 20, а также скобы 12. Благодаря шарнирной подвеске скоб 12, балки работают совместно со скобами 12. Вследствие того, что скобы с лопастями с одной стороны упираются в подшипниковые узлы 24, а с другой стороны могут свободно перемещаться вдоль осей стержней 26 относительно подшипниковых узлов 7, консольные части балок 13 выполняют функцию упругого разгрузочного участка, использующего эффект разгрузки центробежными силами, возникающими при вращении несущего винта. При росте нагрузки на лопасть за счет деформации упругих консольных частей балок увеличивается угол отклонения лопасти со скобой 12 от плоскости вращения, и это приводит к уменьшению нагрузки на центральные части балок из-за возрастания изгибающего момента от центробежных сил, противодействующего изгибающему моменту от аэродинамических сил. Изгибающий момент в плоскости вращения воспринимается пальцами 20 и балками 13. Благодаря такой конструкции уровень нагрузок, воспринимаемых элементами качающейся части втулки, меньше, чем у втулки-прототипа, что позволяет уменьшить массу втулки при проектировании ее для многорежимной эксплуатации.
Предлагаемый несущий винт имеет простую конструкцию, небольшие габаритные размеры, низкий уровень нагрузок на элементы втулки и проводку системы управления, повышенный ресурс; обеспечивает возможность многорежимной эксплуатации несущего винта с разными углами общего шага лопастей, необходимой, в частности, для осуществления прыжкового взлета автожира, посадки с подрывом общего шага, предварительной раскрутки и торможения несущего винта, маневрирования в полете, и может быть рекомендован, в первую очередь, на автожирах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВТУЛКА НЕСУЩЕГО ВИНТА | 2002 |
|
RU2235662C2 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| ВТУЛКА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2007 |
|
RU2363620C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
| ГОЛОВКА РОТОРА С ТОРСИОННОЙ ВТУЛКОЙ И ОБТЕКАТЕЛЕМ ДЛЯ АВТОЖИРА С ПРЫЖКОВЫМ ВЗЛЕТОМ И ВЕРТИКАЛЬНОЙ ПОСАДКОЙ | 2006 |
|
RU2313473C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
Изобретение относится к авиации, в частности к несущим винтам. Несущий винт содержит вращающийся наружный корпус с зубчатым колесом предварительной раскрутки и карданной рамкой. Невращающийся внутренний вал связан с наружным валом через подшипники. Внутри невращающегося вала расположен рычажный механизм управления, предназначенный для наклона оси и перемещения в вертикальном направлении соединенного с ним вращающегося устройства, установленного на механизм управления и связанного с рычагами поворота лопастей. Рычаги поворота лопастей соединены с втулкой через оси и элементы крепления с осевыми шарнирами. Элементы крепления выполнены в виде скоб, к которым присоединены лопасти. Втулка снабжена карданной рамкой и двумя балками с упругими консольными частями, связанными между собой пальцами. На сферических подшипниках под углом конусности к плоскости пластин закреплены скобы, имеющие возможность поворота в подшипниках. Балки шарнирно соединены с вращающимся наружным корпусом втулки карданной рамкой, расположенной над корпусом качалки; оси карданной рамки взаимно перпендикулярны, а точка пересечения осей расположена на оси вращения втулки, причем ось рамки, лежащая в плоскости взмаха, является осью общего осевого шарнира, а ось рамки, перпендикулярная плоскости взмаха, является осью общего горизонтального шарнира. Техническим результатом изобретения является снижение уровня нагруженности втулки, увеличение эксплуатации и ресурса, повышение надежности управления и безопасности полета. 1 ил.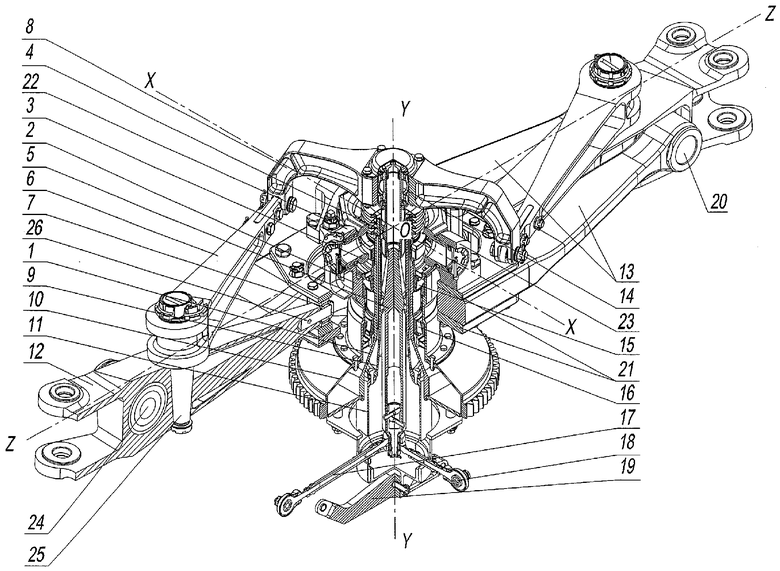
Несущий винт, содержащий вращающийся наружный корпус с зубчатым колесом предварительной раскрутки, невращающийся внутренний вал, связанный с наружным валом через подшипники, и внутри которого расположен рычажный механизм управления для наклона оси и перемещения в вертикальном направлении соединенного с ним вращающегося устройства, выполненного в виде коромысла, установленного на механизм управления и связанного с рычагами поворота лопастей, рычаги поворота лопастей соединены с втулкой через скобы с осевыми шарнирами, к которым прикреплены лопасти, механизм управления выполнен с тремя раздельными тягами, отличающийся тем, что втулка снабжена карданной рамкой и двумя балками с упругими консольными частями, связанными между собой пальцами, жесткие центральные части балок присоединены друг к другу при помощи пластин, каждый осевой шарнир выполнен в виде двух сферических подшипников, один из которых установлен на пальце, связывающем балки, а второй закреплен между пластинами, на сферических подшипниках под углом конусности к плоскости пластин закреплены скобы, имеющие возможность поворота в подшипниках, причем своей внутренней по отношению к втулке частью скобы установлены на сферические подшипники пластин посредством стержней, обеспечивающих возможность перемещения скоб вдоль осей стержней, ось карданной рамки, лежащая в плоскости взмаха, является осью общего осевого шарнира, а ось рамки, перпендикулярная плоскости взмаха, является осью общего горизонтального шарнира.
| ВТУЛКА НЕСУЩЕГО ВИНТА | 2002 |
|
RU2235662C2 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2033943C1 |
| US 6050778 А, 18.04.2004. | |||

