Изобретение относится к энергетике и может быть использовано для превращения энергии ветра, а также гравитационной энергии, в механическую энергию. Решение может быть применено в ветроэнергетических установках.
Известна ветроустановка с роторами Магнуса, содержащая ветроколесо с горизонтальным валом, радиальные лопасти в виде цилиндров с торцевыми дисками, приводы для вращения цилиндров и электрогенератор, причем приводы выполнены в виде роторов типа Савониуса, которые установлены на осях вращения цилиндров и жестко связаны с ними (см. патент на изобретение РФ №2189494, МПК F03D1/00).
Наиболее близким к заявляемому решению является ветродвигатель с двумя степенями свободы, содержащий горизонтальный рабочий вал, жестко соединенный под углом 90° с валом ротора, на котором свободно вращается вингротор (ротор Савониуса), снабженный с торцев концевыми шайбами. Движение рабочего вала осуществляется за счет аэродинамической силы Магнуса, действующей на ротор (Б.Н. Кондрашов, В.Г. Медокс, Е.Б. Бычкунова "О некоторых аэродинамических демонстрациях в курсе общей физики", Б.Н. Кондрашов, И.Ю. Антонов "Роторный ветродвигатель с двумя пересекающимися осями вращения (исследовательская модель обучения)", Межвузовский научный сборник. Вопросы прикладной физики, СГУ. Вып.5, 1999, с.23-26).
Недостатком известных ветродвигателей с двумя пересекающимися осями является чрезвычайно низкое значение аэродинамического качества самовращающихся роторов (в том числе и роторов Савониуса) по сравнению с лопастными ветродвигателями, что не позволяет им конкурировать с традиционными лопастными ветродвигателями, имеющими высокое аэродинамическое качество.
Задачей изобретения является повышение эффективности ветродвигателя за счет использования гироскопических сил прецессии при одновременном использовании аэродинамических сил и сил гравитации, действующих на рабочее колесо.
Поставленная задача достигается тем, что в ветродвигатель, содержащий горизонтальный рабочий вал, соединенный с валом, на котором установлен, по крайней мере, один самовращающийся ротор, согласно решению введен механизм внешнего силового воздействия на самовращающийся ротор в направлении оси горизонтального вала с обратной связью, поддерживающей постоянство внешней силы при изменении внешних воздействий на ротор, при этом ротор имеет три степени свободы.
В ветродвигатель введена дополнительная ось, перпендикулярная оси ротора и рабочего вала, расположенная в точке их пересечения, обеспечивающая три степени свободы роторов.
Механизм внешнего силового воздействия представляет собой груз - поплавок, погруженный в жидкость и соединенный через систему рычагов и втулку с валом ротора, при этом втулка расположена на горизонтальном валу с возможностью вращения вместе с ним и перемещения вдоль его оси.
Поплавок имеет форму цилиндра или фигуры вращения второго порядка, например двух конусов, соединенных вершиной, при этом уровень жидкости в исходном положении проходит через точку вершин конусов.
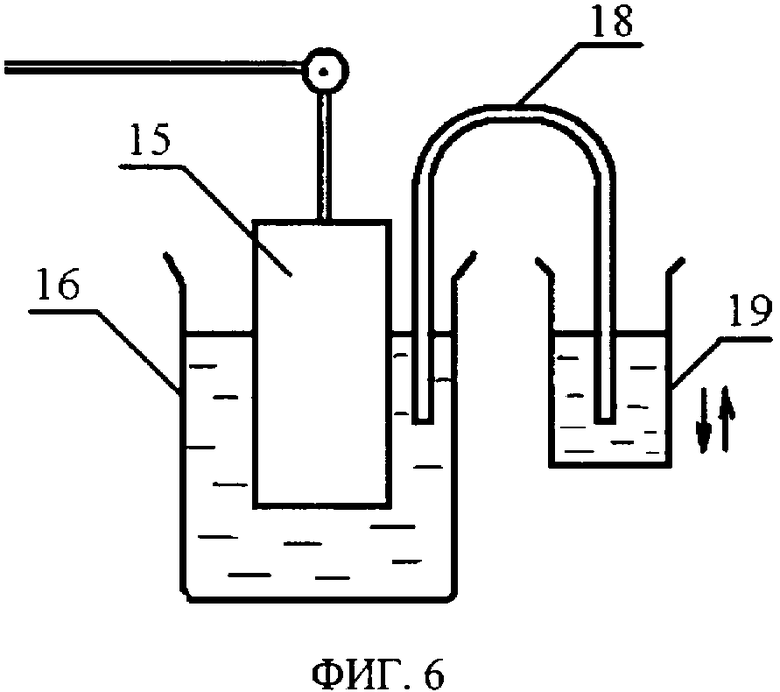
Изменение уровня жидкости осуществляется за счет сильфона с накопительным баком за счет изменения положения накопительного бака по высоте.
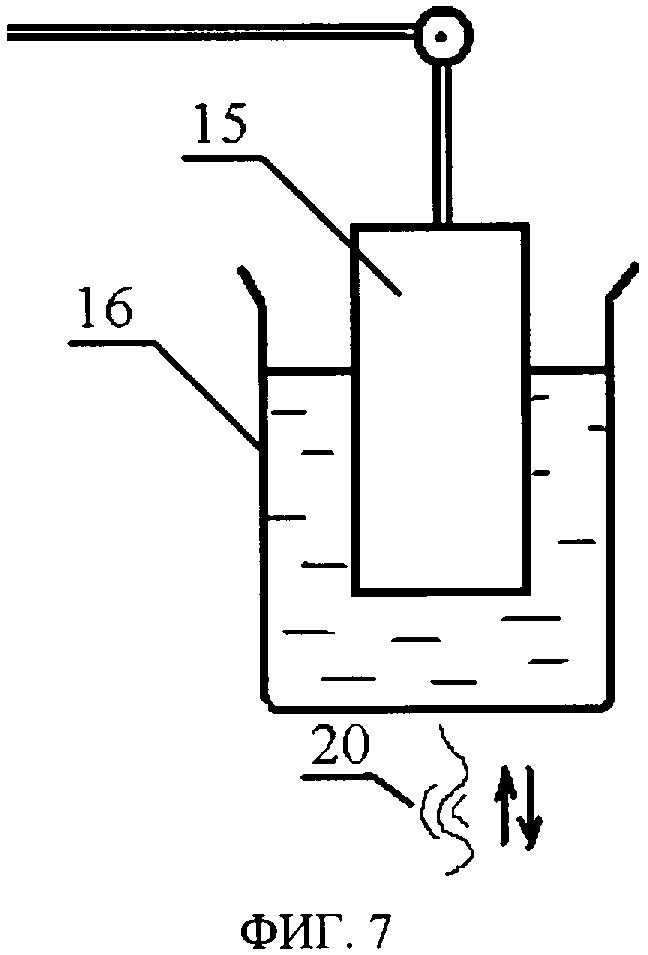
Изменение положения уровня жидкости осуществляется за счет винтового механизма.
Ветродвигатель может содержать один самовращающийся ротор и уравновешивающий его противовес.
Ветродвигатель может содержать два самовращающихся ротора, расположенных на противоположных концах вала ротора относительно рабочего вала, при этом вал ротора состоит из двух шарнирно соединенных частей, обеспечивающих возможность их независимого вращения вокруг дополнительной оси.
Ветродвигатель содержит дополнительные валы с самовращающимися роторами, расположенные радиально относительно рабочего вала, при этом дополнительные валы расположены вдоль оси рабочего вала последовательно друг за другом, с разворотом их относительно друг друга в радиальном направлении, на каждом дополнительном валу расположено по два ротора.
В ветродвигатель введена рама жесткости ротора, являющаяся дополнительной точкой опоры для вала роторов.
Ротор жестко скреплен с валом ротора.
В ветродвигатель введен маховик для изменения центра масс ротора, жестко связанный с ротором и имеющий с ним общую ось.
Маховик выполнен с возможностью, независимого от ротора, вращения, при этом ротор соединен с маховиком через центробежную фрикционную муфту.
Вслед за фрикционной муфтой расположен редуктор или вариатор для изменения скорости вращения маховика по сравнению со скоростью вращения ротора.
В ветродвигатель введены генератор электрической энергии, корпус которого закреплен на раме жесткости, при этом передача вращения от ротора к генератору осуществляется непосредственно от вала ротора или через фрикционную муфту, или через редуктор, и электродвигатель, соединенный с маховиком через электронный блок управления. Электроэнергия, полученная с генератора, поступает на электродвигатель, вращающий маховик, находящийся вне или внутри ротора. Управление скоростью электродвигателя осуществляется через электронный блок управления, позволяющий поддерживать необходимую скорость вращения маховика.
Ротор помещен в диффузор, закрепленный на раме жесткости.
В состав ветродвигателя входит самовращающийся ротор Савониуса, не имеющий концевых шайб, выходящих за пределы лопастей ротора (для уменьшения сил Магнуса), соединенный с рабочим валом дополнительной осью, позволяющей оси ротора отклоняться в направлении оси рабочего вала, и превращающий самовращающийся ротор в гироскоп с тремя степенями свободы. Рабочим движением данного ветроустройства является прецессия самовращающегося ротора-гироскопа вокруг рабочего вала за счет сил, действующих на ротор в направлении оси рабочего вала: силы лобового давления и силы гравитации.
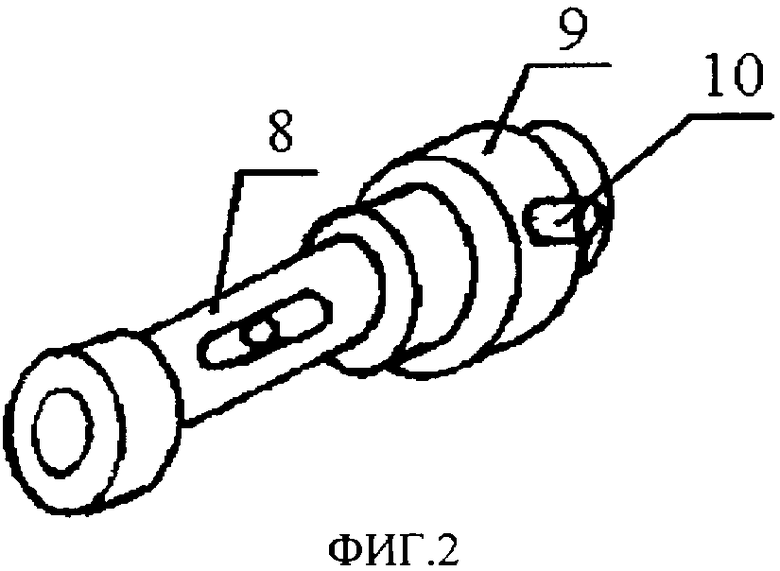
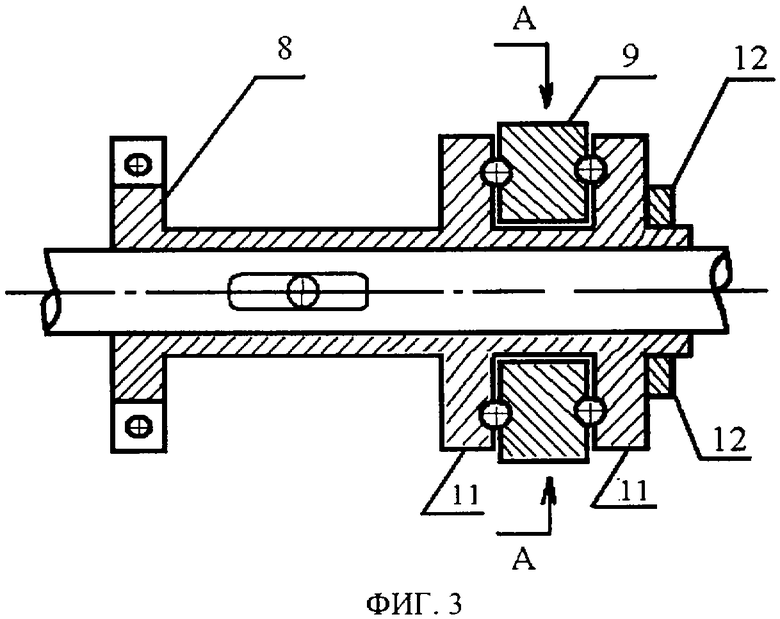
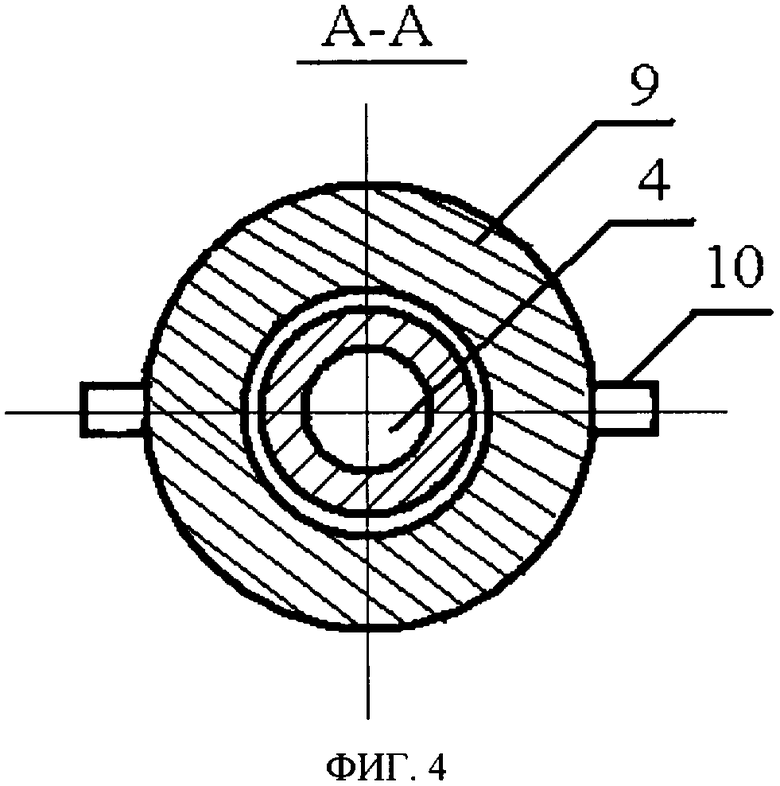
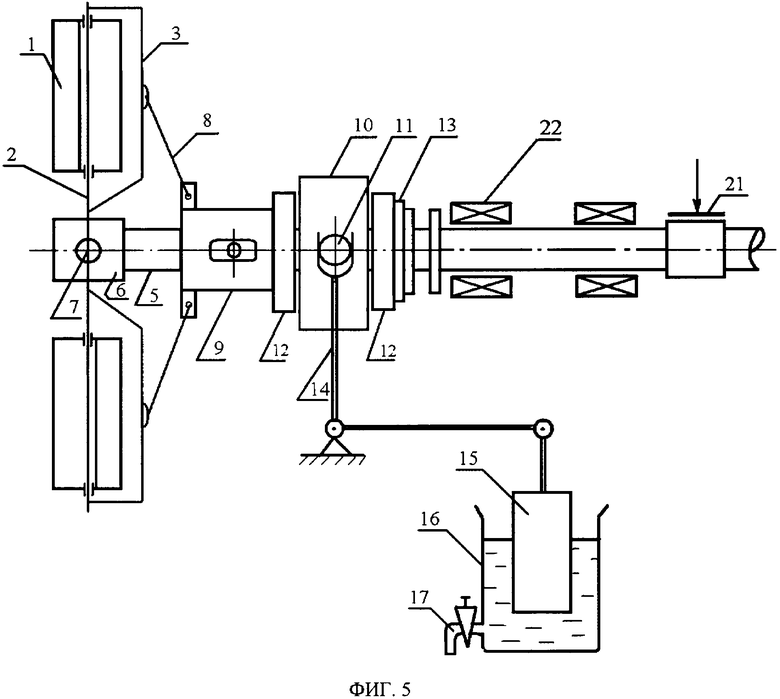
Изобретение поясняется чертежами, где на фиг.1 приведен общий вид ветродвигателя (сбоку), на фиг.2 - общий вид втулки со шпоночным соединением, на фиг.3 - разрез втулки со шпоночным соединением, на фиг.4 - сечение силового кольца, фиг.5 - роторное колесо с двумя роторами, на фиг.6 приведен общий вид сильфонного механизма изменения уровня жидкости в сосуде, на фиг.7 показан винтовой механизм подъема сосуда с жидкостью, где
1 - самовращающийся ротор, например вингротор (ротор Савониуса);
2 - вал ротора;
3 - рама жесткости ротора;
4 - противовес;
5 - рабочий вал;
6 - бобышка;
7 - дополнительная ось;
8 - тяга шарнирного механизма;
9 - втулка со шлицевым или шпоночным соединением и силовым кольцом;
10 - силовое кольцо с пальцами;
11 - пальцы;
12 - упорные кольца;
13 - стопорное кольцо;
14 - шарнирный механизм с вилкой зацепления;
15 - груз - поплавок;
16 - сосуд с жидкостью;
17 - выпускной кран;
18 - сильфон;
19 - накопительный бак;
20 - винтовой механизм подъема сосуда 16;
21 - тормозной механизм;
22 - упорно-радиальные подшипники рабочего вала.
Устройство содержит рабочее колесо, которое может состоять из одного или нескольких роторов Савониуса 1, свободно вращающихся в подшипниках на валу роторов 2, который соединен с рабочим валом 5 через бобышку 6 посредством дополнительной оси 7. Если роторов больше двух, то каждой паре соответствует своя дополнительная ось, при этом дополнительные оси расположены вдоль оси рабочего вала последовательно друг за другом, с разворотом их относительно друг друга в радиальном направлении. На противоположном от бобышки 6 конце вала роторов 2 расположен противовес 4, жестко скрепленный с осью вала ротора 2. Рама жесткости 3 вместе с валом роторов 2 с помощью тяги 8 соединена шарниром со шлицевой втулкой 9. Дополнительная жесткость вала ротора обеспечивается за счет рамы жесткости 3, жестко связанной с валом роторов 2. Вал ротора 2 может поворачиваться вокруг дополнительной оси 7 в сторону оси рабочего вала 5. Бобышка 6 жестко связана с рабочим валом и вращается в радиально-упорных подшипниках 22 при вращении рабочего колеса (ротора 1). На валу вслед за бобышкой 6 расположена втулка со шлицевым или шпоночным соединением 9, которая может перемещаться в некоторых пределах вдоль рабочего вала 5, вращаясь вместе с ним. На внешней поверхности втулки 9 свободно вращается силовое кольцо с пальцами 10, осевое перемещение которого ограничивается упорными кольцами 12 и стопорным кольцом 13. На внешней поверхности силового кольца 10 расположены упорные пальцы 11, в которые входит вилка шарнирного механизма 14, связанная с грузом - поплавком 15, частично погруженным в сосуд с жидкостью 16. Сосуд с жидкостью 16 имеет сливной кран 17, винтовой механизм подъема сосуда 15 и накопительный бак 19.
На дальнем от бобышки 6 конце рабочего вала 5 расположен тормозной механизм 21, который может иметь любую конструкцию (колодочную или ленточную).
Таким образом, ротор представляет собой систему с тремя степенями свободы, единственной неподвижной точкой, которой является точка пересечения трех осей: оси вала роторов 2, дополнительной оси 7 и рабочего вала 5.
Если центр приложения внешних сил не совпадает с этой неподвижной точкой, то ротор начинает прецессировать вокруг оси рабочего вала 5.
Ветродвигатель работает следующим образом. Самовращающийся ротор 1 ориентируется "на ветер", то есть так, чтобы рабочий вал 5 был расположен в направлении ветра, рабочим колесом навстречу ветру. Рабочий вал 5 заторможен тормозом 21. Угол между рабочим валом 5 и валом роторов 2 устанавливается равным 90° за счет выставления уровня жидкости в сосуде 16. Это обеспечивается сливом излишней жидкости при помощи крана 17, что изменяет положение груза поплавка, и это изменение передается на вал роторов через систему шарнирного механизма с вилкой 14, через пальцы 11 силового кольца 10 и втулки 9 через шарнирную тягу 8, связанную с рамой жесткости 3 и валом роторов 2. Изменение уровня жидкости может также изменяться с использованием винтового механизма 20 (фиг.7) или сильфона 18 (фиг.6).
При раскручивании ротора и достижении заданной скорости w изменяют положение уровня жидкости в сосуде 16 с помощью крана 17, таким образом, чтобы векторная сумма сил лобового давления потока воздуха, действующего на ротор, силы тяжести G и архимедовой силы fa приняла заданное заранее значение F, и отпускается тормоз 21. При этом условии на ротор, вращающийся с угловой скоростью w и имеющий три степени свободы, будет действовать момент силы, равный произведению силы F на плечо а, равное расстоянию от точки пересечения трех осей: оси роторов 2, дополнительной оси 7 и оси рабочего вала 5 до точки приложения внешней силы F, определяемой положением конца тяги шарнирного механизма 8 на раме жесткости 3. Ротор, входящий в состав ветроколеса, начнет прецессировать вокруг оси рабочего вала 5 с угловой скоростью W=Fa/Iw (при условии, что w намного больше W).
За счет сил трения в данном устройстве, а также при увеличении нагрузки на рабочий вал 5 под действием гироскопических сил, роторы вместе с рамой жесткости 3 начнут отклоняться в сторону рабочего вала 5, это отклонение передается через тягу шарнирного механизма 8, втулку 9, через силовое кольцо 10 и шарнирный механизм с вилкой зацепления 14 на груз - поплавок 15, который начнет погружаться в жидкость сосуда 16, что вызовет появление дополнительной архимедовой силы, направленной в противоположную сторону (вверх). Увеличение архимедовой силы компенсирует силу, возникающую при увеличении нагрузки на рабочий вал 5, таким образом, что векторная сумма сил, действующих на ось ротора, останется постоянной.
Использование генератора и электродвигателя (не показаны) позволяет изменять скорость вращения маховика, входящего в состав рабочего колеса, в заданных пределах независимо от скорости ветра.
Предложенный ветродвигатель, в отличие от известных, имеет три степени свободы, что определяет его особенности. Ветродвигатель данной конструкции является тихоходным (малооборотным) с большим крутящим моментом. Причем число оборотов рабочего вала практически не зависит от числа роторов. При увеличении числа роторов увеличивается только крутящий момент.
Изобретение относится к ветроэнергетике и может быть использовано для превращения энергии ветра, а также гравитационной энергии, в механическую. Ветродвигатель содержит горизонтальный рабочий вал, соединенный с валом, на котором установлен, по крайней мере, один самовращающийся ротор, а также механизм внешнего силового воздействия на самовращающийся ротор в направлении оси горизонтального вала с обратной связью, поддерживающей постоянство внешней силы при изменении внешних воздействий на ротор. Ротор соединен с рабочим валом дополнительной осью, позволяющей оси ротора отклоняться в направлении оси рабочего вала, и превращает самовращающийся ротор в гироскоп с тремя степенями свободы. Рабочим движением данного устройства является прецессия самовращающегося ротора-гироскопа вокруг рабочего вала за счет сил, действующих на ротор в направлении оси рабочего вала: силы лобового давления и силы гравитации. Ветродвигатель обеспечивает повышение эффективности за счет использования гироскопических сил прецессии при одновременном использовании аэродинамических сил и сил гравитации, действующих на рабочее колесо. 15 з.п. ф-лы, 7 ил.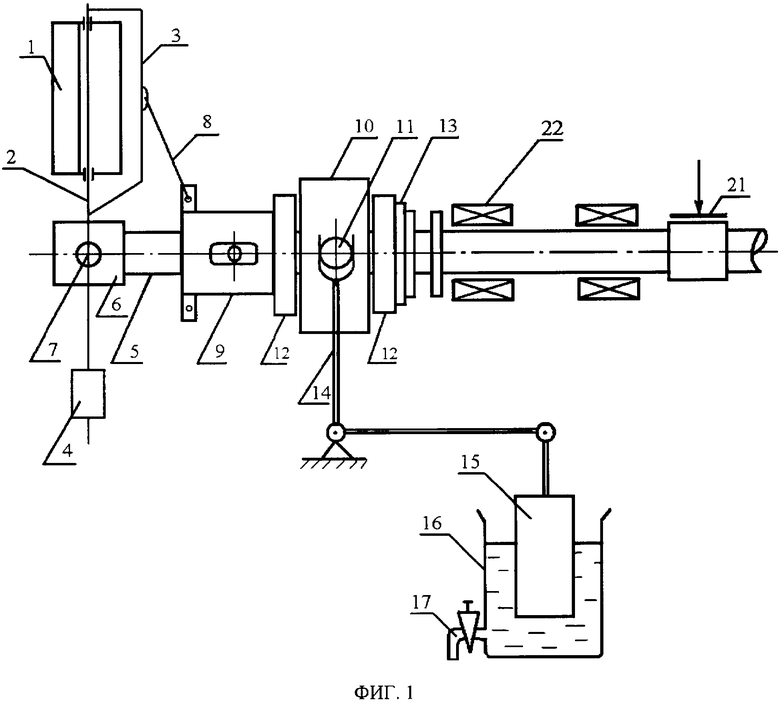
| ВЕТРОУСТАНОВКА С РОТОРАМИ МАГНУСА | 1993 |
|
RU2189494C2 |
| ВЕТРОДВИГАТЕЛЬ | 2001 |
|
RU2193687C2 |
| АВТОНОМНАЯ ВЕРТИКАЛЬНО-ОСЕВАЯ ВЕТРОУСТАНОВКА | 1992 |
|
RU2046997C1 |
| Энергетическая установка | 1991 |
|
SU1793098A1 |
| DE 3246694 A, 20.06.1984. | |||

