Изобретение относится к силовым гироскопическим устройствам и может быть использовано при преобразовании возвратно-поступательного движения с малой амплитудой и большой силой в непрерывное вращательное движение, например, для вращения ротора генератора, вырабатывающего электроэнергию на приливных электростанциях.
Известно электромеханическое устройство преобразования возвратно-поступательного движения во вращательное, содержащее магнитопровод с полюсами, между которыми размещен ротор с короткозамкнутой обмоткой (патент №1480028, H02K 7/06, 33/00, опубл. бюл. №18, 1989.05.15) - [1]. Его недостатком является низкий КПД работы в связи с наличием короткозамкнутой обмотки.
Наиболее близким к предлагаемому изобретению является источник планетарной инерционной энергии, содержащий гироскоп, включающий гиромотор, источник питания гиромотора, внутреннюю раму с полуосями и наружную раму в неподвижных полуосях, преобразователь мощности и средство повторной прецессии (Источник планетарной инерционной энергии и способ получения энергии от гироскопной системы, использующей вращение Земли. Заявка №95108325, G01C 19/00, опубл. 1996.11.27) - [2]. Когда Земля вращается, ротор гироскопа с фиксированной рамой прецессирует, приводя в движение генератор, установленный между элементами конструкции гироскопа, которые находятся в состоянии взаимного относительного движения. После каждого рабочего такта при минимальном подводе энергии средство повторяющейся прецессии переориентирует ротор в его первоначальную ориентацию, который плавно входит в следующий рабочий такт, обеспечивая выработку результирующей положительной энергии.
Его недостатком является необходимость затраты энергии для переориентации ротора и паузы в работе на переориентацию.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в получении непрерывного вращательного движения из возвратно-поступательного движения с малой амплитудой и большой силой.
Технический результат достигается тем, что в гироскопическом преобразователе возвратно-поступательного движения во вращательное, содержащем наружную раму, установленную на неподвижных опорах и имеющую опоры, в которых установлена внутренняя рама, ось которой является выходом гироскопического преобразователя возвратно-поступательного движения во вращательное, механически связанная со статором гиромотора, обмотка которого связана с токоподводящим узлом, и имеющая опоры, в которых установлен ротор гиромотора, новым является то, что в гироскопический преобразователь введен источник возвратно-поступательного движения, выполненный с возможностью воздействия на наружную раму моментом
М(φ)=F·l,
F>0, при 0°<φ<180°
создаваемым силой
F<0, при 180°<φ<360°
действующей на плече l,
где φ - угол между осью наружной рамы и вектором кинетического момента ротора гиромотора.
В гироскопический преобразователь возвратно-поступательного движения во вращательное введен датчик положения внутренней рамы, ротор которого механически связан с внутренней рамой, а его статор - с наружной рамой гироскопического преобразователя возвратно-поступательного движения во вращательное, и управляющее устройство, вход которого соединен с выходом датчика положения внутренней рамы, а выход - с входом источника возвратно-поступательного движения, кинематически связанного с наружной рамой.
Сущность заявленного изобретения поясняется на фиг.1, где представлен вариант реализации гироскопического преобразователя возвратно-поступательного движения во вращательное.
Предлагаемый гироскопический преобразователь возвратно-поступательного движения во вращательное имеет вал 1 статора гиромотора, подшипники 2 ротора гиромотора, статор 3 гиромотора с магнитопроводом и обмоткой, ротор гиромотора, состоящий из маховика 4 и обмотки 4.1, например, короткозамкнутого типа, внутреннюю раму 5, полуоси 6 внутренней рамы, подшипники 7 внутренней рамы, наружную раму 8, контактные кольца 9, щетки 10 со щеткодержателями и пружинами, гибкие токоподводы 11, изоляционную втулку 12, полуоси 13 наружной рамы, подшипники 14 наружной рамы, основание 15, исполнительный механизм 16, тяги 17, кинематически связанные с наружной рамой 8, ротор 18 датчика положения внутренней рамы, статора 19 датчика положения внутренней рамы, источник 20 возвратно-поступательного движения, управляющее устройство 21.
На валу 1 статора установлены подшипники 2 ротора и статор 3 с магнитопроводом и обмоткой. Ротор 4 опирается на подшипники 2 и отделен от статора 3 малым рабочим зазором. Вал 1 статора установлен во внутренней раме 5, механически связанной с полуосями 6 внутренней рамы. Они опираются на подшипники 7, установленные в наружной раме 8. С наружной рамой 8 механически связаны полуоси 13 наружной рамы, опирающиеся на подшипники 14 наружной рамы. Они установлены в основании 15. На наружной раме 8 установлен корпус исполнительного механизма 16, вал которого механически связан с полуосью 6 внутренней рамы. С наружной рамой 8 связаны тяги 17, которые кинематически соединены с источником 20 возвратно-поступательного движения, выполненного с возможностью воздействия на наружную раму 8 в направлении, зависящем от положения внутренней рамы 5 относительно наружной 8.
На правой полуоси 6 внутренней рамы расположена изоляционная втулка 12, на которой укреплены контактные кольца 9. К ним пружинами прижаты щетки 10 со щеткодержателями. Со щетками соединены гибкие токоподводы 11, подключенные к источнику электроэнергии. Ротор 18 датчика положения внутренней рамы механически связан с левой полуосью 6 внутренней рамы, а его статор 19 - с наружной рамой 8. Вал 1 статора перпендикулярен полуосям 6 внутренней рамы, которые перпендикулярны полуосям 13 наружной рамы. Вал 1 статора и правая полуось 6 внутренней рамы выполнены полыми для проводников, соединяющих контактные кольца 9 с зажимами обмотки статора 3. Контактные кольца 9 и изоляционная втулка 12, конструктивно принадлежащие внутренней раме 5, а также щетки 10 со щеткодержателями и пружинами и гибкие токоподводы 11, конструктивно расположенные на наружной раме 8, образуют токоподводящий узел для питания гиромотора.
Выход датчика положения внутренней рамы подключен к входу управляющего устройства 21. Выход управляющего устройства 21 связан с входом источника 20 возвратно-поступательного движения, механические выходы которого кинематически связаны с тягами 17.
Гироскопический преобразователь возвратно-поступательного движения во вращательное работает следующим образом.
На гибкие токоподводы 11 подается многофазная система напряжений (обычно трехфазная), которые через щетки 10, контактные кольца 9 и проводники внутри правой полуоси 6 внутренней рамы поступают на зажимы обмотки статора 3. Получается вращающийся магнитный поток, который, взаимодействуя с током ротора 4.1 гиродвигателя, раскручивает ротор 4 до заданной угловой скорости Ω. Ротор 4 приобретает кинетический момент
H=JΩ,
где J - осевой момент инерции ротора.
Для успешного запуска вал 1 статора расположен вначале под некоторым углом к оси наружной рамы 8 (например, 90°).
Источник 20 возвратно-поступательного движения через тяги 17 воздействует на наружную раму парой сил величиной F, показанных на фиг.1 сплошными (положительное направление) и штриховыми стрелками.
Так как ось ротора 4 не параллельна полуоси 13 наружной рамы, то в результате к внутренней раме 5 через наружную раму 8 будет приложен момент (показан сплошной стрелкой)
М(φ)=F·l,
создаваемый силой, F>0, при 0°<φ<180°, действующей на плече l,
где φ - угол между осью наружной рамы и вектором кинетического момента ротора гиромотора.
Под действием этого момента начнется прецессия ротора 4 в сторону совмещения вектора кинетического момента  с вектором момента пары сил
с вектором момента пары сил  с угловой скоростью
с угловой скоростью
 ,
,
направленной на фиг.1 влево (сплошная стрелка).
Вместе с ротором 4 будет прецессировать внутренняя рама 5. По инерции она проскочит положение, при котором ось ротора 4 параллельна полуоси 13 наружной рамы (φ=180°), и одновременно произойдет поворот наружной рамы 8 вокруг своих полуосей 13 на некоторый угол. После этого сигнал uφ с датчика положения внутренней рамы, поступающий на управляющее устройство 21, с помощью сигнала uy изменяет направление сил F (показаны штриховыми стрелками) F<0, при 180°<φ<360° и соответственно направление вектора момента  (показан также штриховой стрелкой), а прецессия ротора 4 будет происходить в прежнем направлении (направление угловой скорости прецессии ω показано штриховой стрелкой).
(показан также штриховой стрелкой), а прецессия ротора 4 будет происходить в прежнем направлении (направление угловой скорости прецессии ω показано штриховой стрелкой).
Отметим, что наружная рама 8 совершает небольшие колебания вокруг своих полуосей 13 относительно нейтрального положения с амплитудой 5-20 градусов. Внутренняя рама 5 вращается непрерывно вокруг своих полуосей подвеса 6 в одном направлении.
Средняя мощность, передаваемая гироскопическому преобразователю, определяется выражением
где ν(t) - скорость движения тяги; Т - период движения.
В качестве источника 20 возвратно-поступательного движения могут быть применены гидро- или пневмоцилиндры, поступление рабочего тела (жидкости или газа) в которые регулируется электроклапанами, питающимися от управляющего устройства 21, которое может быть выполнено в виде фазочувствительного выпрямителя и усилителя напряжения.
В качестве датчика положения внутренней рамы может быть использован синусно-косинусный вращающийся трансформатор.
В качестве исполнительного механизма 16 может быть применен электрический генератор, вырабатывающий электроэнергию на приливных электростанциях.
Таким образом, получен гироскопический преобразователь возвратно-поступательного движения с малой амплитудой и большой силой в непрерывное вращательное движение. Отметим высокий коэффициент полезного действия преобразователя, поскольку гиромотор работает вхолостую, преодолевая лишь моменты трения в подшипниках и аэродинамический момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновая электростанция | 2018 |
|
RU2694712C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
Изобретение относится к силовым гироскопическим устройствам и может быть использовано при преобразовании возвратно-поступательного движения с малой амплитудой и большой силой в непрерывное вращательное движение, например, для генерирования электроэнергии. Преобразователь имеет наружную раму 8, установленную на неподвижных опорах и имеющую опоры 7, в которых установлена внутренняя рама 5, которая механически связана со статором 3 гиромотора, обмотка которого связана с токоподводящим узлом. В опорах 2 внутренней рамы 5 установлен ротор 4 гиромотора. На полуоси 6 внутренней рамы расположен датчик положения внутренней рамы, который в зависимости от ее положения выдает сигнал на управляющее устройство 21, которое через источник возвратно-поступательного движения изменяет направление воздействия на наружную раму 8. Выходом преобразователя является ось 6 внутренней рамы, на которой установлен исполнительный механизм 16. Благодаря источнику возвратно-поступательного движения, выполненного с возможностью воздействия на наружную раму в направлении, зависящем от положения внутренней рамы, получен гироскопический преобразователь возвратно-поступательного движения с малой амплитудой и большой силой в непрерывное вращательное движение при высоком коэффициенте полезного действия. 1 з.п. ф-лы, 1 ил.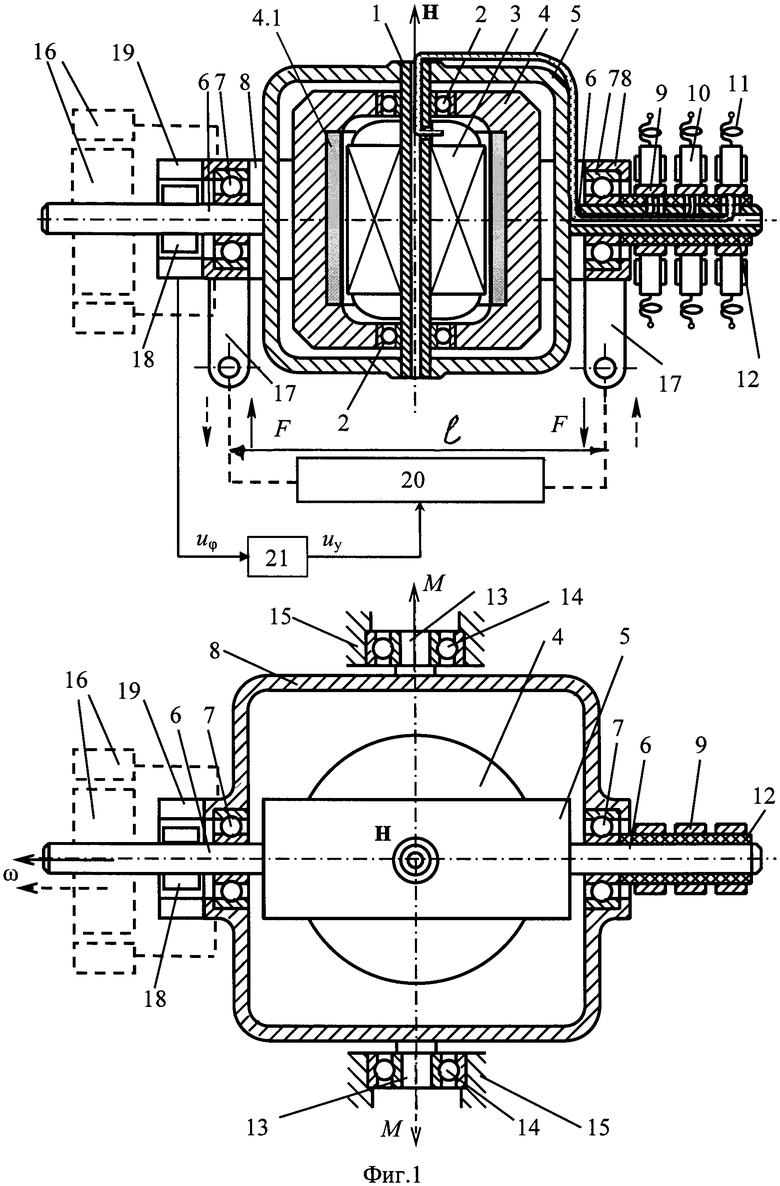
1. Гироскопический преобразователь возвратно-поступательного движения во вращательное, содержащий наружную раму, установленную на неподвижных опорах и имеющую опоры, в которых установлена внутренняя рама, ось которой является выходом гироскопического преобразователя возвратно-поступательного движения во вращательное, механически связанная со статором гиромотора, обмотка которого связана с токоподводящим узлом, и имеющая опоры, в которых установлен ротор гиромотора, отличающийся тем, что он содержит источник возвратно-поступательного движения, выполненный с возможностью воздействия на наружную раму моментом
M(φ)=F·l,
создаваемым силой
F>0 при 0°<φ<180°
F<0 при 180°<φ<360°,
действующей на плече l,
где φ - угол между осью наружной рамы и вектором кинетического момента ротора гиромотора.
2. Гироскопический преобразователь возвратно-поступательного движения во вращательное по п.1, отличающийся тем, что в него введены датчик положения внутренней рамы, ротор которого механически связан с внутренней рамой, а его статор - с наружной рамой гироскопического преобразователя возвратно-поступательного движения во вращательное, и управляющее устройство, вход которого соединен с выходом датчика положения внутренней рамы, а выход - с входом источника возвратно-поступательного движения, кинематически связанного с наружной рамой.
| RU 95108324 A1, 27.11.1996 | |||
| Электромеханическое устройство преобразования возвратно-поступательного движения во вращательное | 1987 |
|
SU1480028A1 |
| Электромагнитный преобразователь возвратно-поступательного движения во вращательное | 1991 |
|
SU1814748A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МОТОР-КОЛЕСО | 1991 |
|
RU2038984C1 |

