Группа изобретений относится к авиации, а именно к винтокрылым летательным аппаратам, возможно применение ротора в ветроэнергетике.
Летательному аппарату (ЛА), тяжелее воздуха, подъемную силу, как правило, создают крылья или несущие винты. Несущий винт эффективно работает на малых скоростях полета, фиксированное крыло эффективно на больших. Использование только одного способа создания подъемной силы приводит к ограничению диапазона скоростей ЛА. Неудачное использование одновременно обоих приводит к сложению недостатков.
Несущий ротор с плоским кольцеобразным крылом предназначен для скоростных винтокрылых ЛА с вертикальным взлетом и посадкой (ВВП), где он используется, исключительно, для создания подъемной силы. В горизонтальном полете ротор работает на авторотации, внешнее крыло движется в воздушном потоке с положительным углом атаки и создает основную подъемную силу. Для продвижения по курсу используется маршевый винт или реактивный привод.
Из существующего уровня техники известен аналог (патент США US 006086016A от 11.07.2000, Gyro stabilized triple mode aircraft) «гиростабилизированный трехрежимный летательный аппарат», где вертолетный несущий винт усовершенствован добавлением кольцеобразного плоского крыла и описан ЛА с двумя такими соосными роторами.
На рисунках и в описании этого патента приведено осевое шарнирное крепление жестких вертолетных лопастей и с втулкой, и с кольцеобразным крылом. Управление ЛА производится механизацией фиксированных крыльев и хвостового оперения.
Недостатки данного технического решения:
1. Описанный ЛА заявлен, но не является гиростабилизированным. Плоскости вращения кольцеобразных крыльев и положение корпуса ЛА не имеют жесткой связи. Биплан с двумя непараллельными крыльями летать не сможет.
2. Винтокрылый ЛА, без управления общим и циклическим шагом лопастей несущего ротора - неуправляем. Использование автомата перекоса не упоминается, ни в формуле, ни на чертежах, ни в описании.
3. Шарнирное крепление лопастей к внешнему кольцеобразному крылу снижает прочность ротора, усложняет конструкцию, не исключает вредные крутильные колебания концов лопастей.
4. Низкий коэффициент полезного действия (КПД) ротора как винта. Ротор работает в трех режимах: вертолетном, самолетном и автожирном. Жесткие лопасти могут иметь лишь одну фиксированную крутку, а значит, на взлете и при авторотации, перегружены вершины лопастей.
Известен более поздний аналог (патент США US6845941 B2 от 25.01.2005, Rotary/fixed wing aircraft) «летательный аппарат с вращающимся/фиксированным крылом».
В нем заявлен ротор с одной втулкой и радиальными лопастями в кольцеобразном плоском крыле, где каждая лопасть имеет осевые шарниры или отклоняемые симметричные предкрылки и закрылки. ЛА с одним описанным ротором и механизмом его останова и фиксации в горизонтальном полете имеет две разные системы управления лопастями: в вертолетном режиме - с вращающимся ротором, и в самолетном - с фиксированным ротором. Основные недостатки данного технического решения:
1. Низкая аэродинамическая упругость и жесткость статического ротора в самолетной конфигурации. Конструкция подвержена флаттеру и дивергенции. Кольцеобразное крыло связано с единственной втулкой длинными лопастями, статичный ротор, не натянутый центробежными силами, теряет жесткость, поэтому, фиксируя втулку, невозможно жестко зафиксировать крыло.
2. Ротор имеет низкий КПД, как винт, и невысокое аэродинамическое качество, как фиксированное крыло. Жесткие лопасти имеют значительную толщину и неэффективный симметричный профиль.
3. Лопасти с отклоняемыми симметричными предкрылками-закрылками, а также система управления ротором в двух разных режимах избыточно сложны и ненадежны.
Аналоги используют несущий ротор, содержащий: одно плоское кольцеобразное крыло и одну втулку, соединенные, через осевые шарниры, радиальными жесткими лопастями с изменяемым шагом.
Замкнутое крыло ротора может отличаться от кольцеобразного, в патенте US 4560358 24.12.1985 «Gliding ring» приведены разные варианты его формы плана и сечения.
Задачей, на решение которой направлено изобретение, является построение оптимального несущего ротора, с высокими аэродинамическими и эксплуатационными характеристиками, а также создание экономичного гиростабилизированного ЛА.
Данная задача решается за счет того, что новый несущий ротор имеет ряд новых конструктивных элементов и связей:
1. Внешнее замкнутое крыло - одно, число лопастей и втулок - произвольное.
2. Внешнее замкнутое крыло - произвольной трехмерной формы, преимущественно осесимметричной, и произвольной конусности, от плоского до цилиндрического. Во всем диапазоне относительной ширины крыла, от узкого обода на концах длинных лопастей, до широкого крыла с небольшим внутренним импеллером.
3. Ротор может иметь одну, две и более втулок - узлов соединения лопастей.
4. Втулки могут иметь произвольную форму и размер. Плоскость крепления лопастей, может быть не одна, может не совпадать с плоскостью крыла.
5. Ротор имеет устройство управления общим и циклическим шагом лопастей. Единая система управления ротором универсальна для всех режимов полета.
6. Управление шагом лопастей возможно относительным положением втулок и крыла.
7. Лопасти, не строго радиальные, могут иметь разную стреловидность, сложную трехмерную форму, изгибы, расширения, расщепления, сужения, сопряжения, подкосы, отклоняемые предкрылки и закрылки.
8. Сечение лопасти имеет аэродинамический профиль, в широком диапазоне относительной толщины: от толстых, до экстремально тонких.
9. Возможен эффективный ротор с изменяемым шагом, где гибкие на кручение, торсионные лопасти имеют изменяемую геометрическую крутку.
10. Жесткость лопастей на кручение может быть переменная, например: плавно растет от комля к вершине и уменьшается в сочленении с крылом.
11. Тонкие гибкие лопасти могут изменять кривизну профиля, возможны лопасти с жестким фиксированным носком и отклоняемым закрылком.
12. Оптимальным является только бесшарнирное, то есть жесткое, упругое или упруговязкое крепление лопасти к крылу. В сочленении крыла и лопастей не используются осевые шарниры.
13. Возможно крепление одной лопасти к разным втулкам. Крепление лопастей к втулкам может быть: жесткое, упругое, упруговязкое, шарнирное. Конструктивно исполнено: непосредственно, через торсион, через осевые или смещенные осевые шарниры.
14. В складных и гибких вариантах ротора, возможно подвижное скользящие сочленения элементов, а также применение вертикальных и горизонтальных шарниров.
15. Замкнутое крыло может служить ротором двигателя электрического привода, генератора, магнитного тормоза.
16. Допустимо размещение во вращающемся роторе: топлива, аккумуляторов, топливных элементов, двигателей, реактивных сопел, панелей солнечных батарей, датчиков, антенн, балансиров, сигнальных огней, противообледенительных систем, сигнальных кабелей, силовой проводки и других элементов аппаратуры и конструкции.
Приведенная совокупность и комбинации признаков обеспечивает получение следующих технических результатов:
- Снижается акустический шум несущего ротора.
- Возрастает жесткость ротора, исчезает дисбаланс и вибрация.
- Полностью исключаются: земной резонанс, ряд опасных режимов в полете.
- Снимаются ограничения по размерам ротора. Выше масштабируемость.
- Снимаются конструктивные ограничения максимальной скорости, расширяется диапазон безопасных скоростей полета.
- Лопасти с изменяемой круткой имеют предельно высокий КПД, и на авторотации, и в вертолетном режиме.
- Тонкие лопасти с нулевой круткой имеют минимальное профильное сопротивление ротора в скоростном горизонтальном полете.
- Растет аэродинамическое качество ЛА, максимальная скорость, дальность полета и время дежурства. Снижается расход топлива, стоимость летного часа.
- Сбалансированный ротор используется как маховик - кинетический аккумулятор энергии, высокой мощности и емкости.
- Увеличивается грузоподъемность ЛА, весовое и энергетическое совершенство.
- Жесткий ротор с двумя втулками способен придать силовую гироскопическую стабилизацию ЛА. Снижаются потери аэродинамического качества на продольную и поперечную балансировку.
- Снижается чувствительность к атмосферной турбуленции в полете.
- Обеспечивается всепогодность. Надежный вертикальный взлет и вертикальная посадка возможны в сложных условиях.
- Ниже требования к мощности и надежности силовой установки.
- Упрощается пилотирование. Проще система управления и стабилизации. Появляется возможность полной автоматизации полета.
- Легкие гибкие лопасти снижают нагрузки в шарнирах и системе управления. Выше ресурс ротора и надежность системы управления.
- Новые простые варианты реализации автоматов шага/перекоса упрощают систему управления, единую и универсальную для всех режимов полета.
- Упрощается конструкция и ротора, и ЛА в целом. Улучшается технологичность. Снижается себестоимость.
Ротор с двумя втулками способен жестко фиксировать плоскость вращения замкнутого крыла, что делает ЛА гиростабилизированным. Конструкция ротора аналогична велосипедному колесу, где лопасти, как спицы, фиксируют плоскость обода - крыла. Далее патентуемый ротор, ввиду внешнего сходства, будем называть - воздушное колесо.
Вибрация - родовое проклятие винтокрылых летательных аппаратов. Это не только дискомфорт пассажиров и экипажа, но и увеличенный вес корпуса и трансмиссии ЛА, а самое главное - это ограниченный летный ресурс ротора и системы управления. Основная причина вибрации - неустранимый дисбаланс традиционных несущих винтов. Только жесткий в плане ротор может быть сбалансирован. Внешний плоский контур замыкает нагрузки и делает воздушное колесо жестким в плане. Вибрация исчезает. Многократно увеличивается ресурс ротора, его конструктивная предельная скорость, ограниченные у винтокрылов прочностью несущего винта и системы управления.
ЛА ВВП не привязаны к аэродромам, но не могут получить свободу, в том числе из-за высокой шумности. Любой вращающийся воздушный винт, в потоке, при неосевом обтекании, испытывает переменные нагрузки. Толстые прямые радиальные лопасти открытого несущего винта порождают в полете характерные хлопки, на концах лопастей образуются вихри. Множество тонких серповидных лопастей внутри замкнутого контура, с разной стреловидностью и угловым смещением значительно снижают амплитуду таких колебаний. Простое кольцо не способно их полностью сгладить. Бесшумность воздушного колеса в полете обеспечивает комплекс мер, в том числе и замкнутое крыло сложной осесимметричной формы.
Высокоскоростной массивный маховик способен аккумулировать и быстро выдавать большие объемы энергии непосредственно лопастям без двигателя, без сложной трансмиссии, без реактивного момента и без лишнего шума. Маховик обеспечивает высокую тяговооруженность и живучесть, в случае отказа двигателя, редуктора и других систем ЛА.
Сокращаются габариты несущего ротора, возрастает вес полезной нагрузки. Диаметр несущего винта у вертолета жестко связан с мощностью силовой установки и взлетным весом. Маховик снимает такую зависимость. Надежный скоростной вертикальный взлет возможен с ротором меньшего диаметра, и даже с туннельным вентилятором, независимо от мощности силовой установки или взлетного веса.
Массивное воздушное колесо пассивно, как силовой гироскоп, обеспечивает силовую продольную и поперечную стабилизацию. ЛА становится гиростабилизированным и устойчивым, исчезает чувствительность к атмосферной турбуленции. Возможна активная стабилизация по высоте управляемыми лопастями ротора с большой кинетической энергией маховика. Всепогодный летательный аппарат - реален.
Сущность изобретения поясняется иллюстрациями, где представлено:
Фиг.1. Четырехлопастное воздушное колесо в аксонометрической проекции.
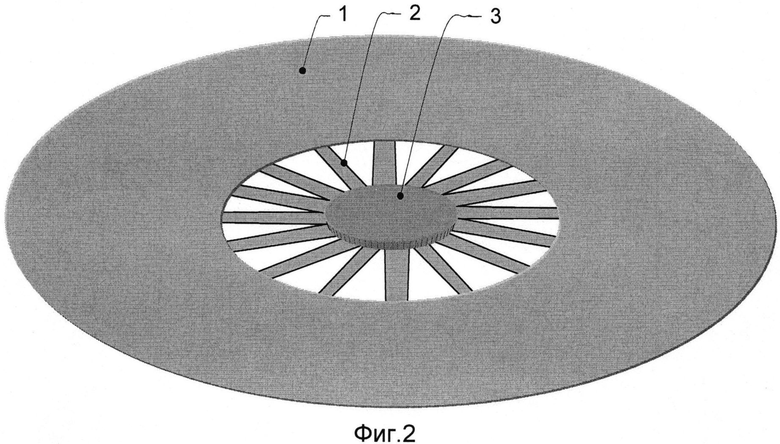
Фиг.2. Воздушное колесо - подъемный вентилятор в аксонометрической проекции.
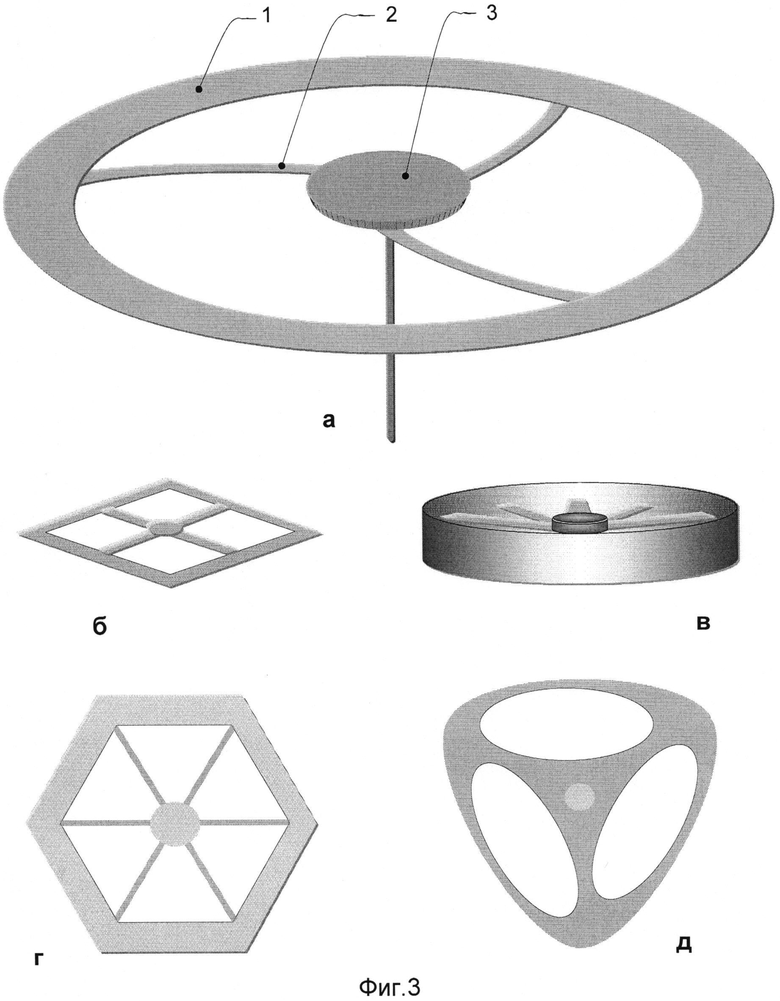
Фиг.3. Примеры вариантов воздушного колеса с одной втулкой.
а) Трехлопастное воздушное колесо с кольцеобразным крылом.
б) Четырехлопастное воздушное колесо с ломаным замкнутым крылом.
в) Воздушное колесо с цилиндрическим крылом - импеллер.
г) Шестилопастное воздушное колесо с плоским замкнутым крылом.
д) Трехлопастное воздушное колесо с осесимметричным крылом.
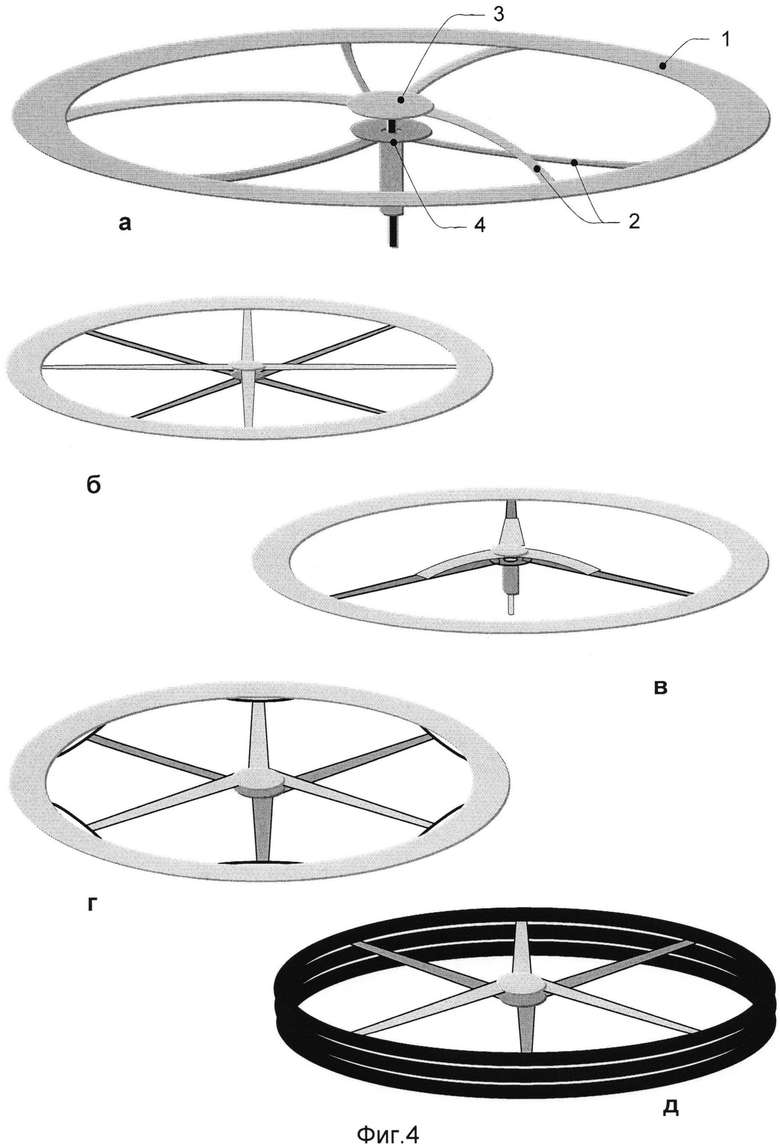
Фиг.4. Примеры вариантов воздушного колеса с двумя втулками в аксонометрической проекции.
а) Жесткое шестилопастное воздушное колесо с двумя втулками.
б) Жесткое восьмилопастное воздушное колесо с двумя втулками.
в) Нежесткое трехлопастное воздушное колесо с двумя втулками со скользящим продольным сочленением лопастей двух разнесенных втулок.
г) Нежесткое шестилопастное воздушное колесо с двумя втулками с подвижным упругим креплением вершины лопастей к внешнему крылу.
д) Воздушное колесо с двумя втулками в цилиндрическом внешнем крыле.
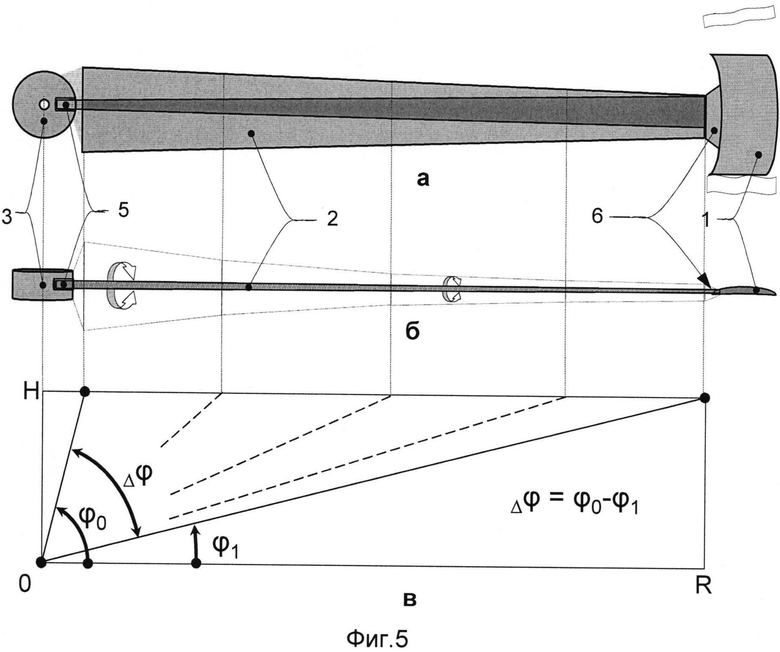
Фиг.5. Гибкая торсионная лопасть воздушного колеса с изменяемой круткой.
а) Вид сверху.
б) Вид сбоку.
в) Изменение угла установки сечения гибкой лопасти в зависимости от радиуса сечения.
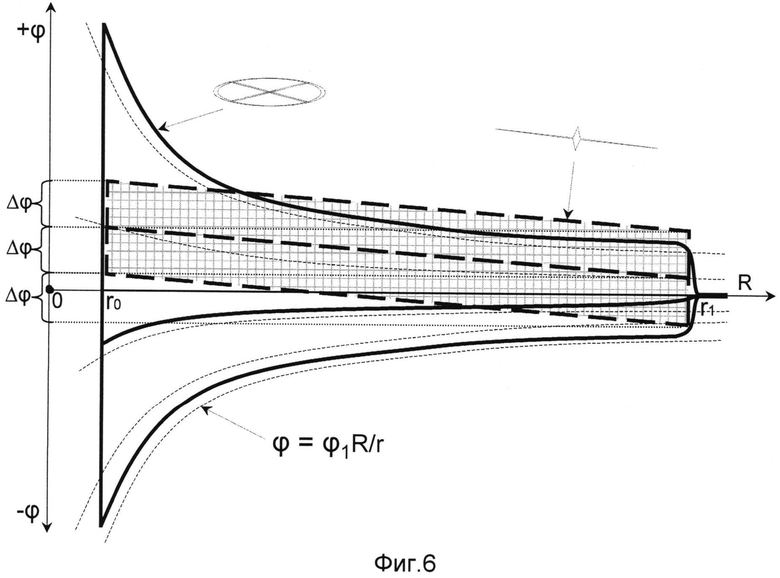
Фиг.6. Диаграмма сравнения изменения угла установки идеальной, гибкой и жесткой лопасти в зависимости от относительного радиуса сечения.
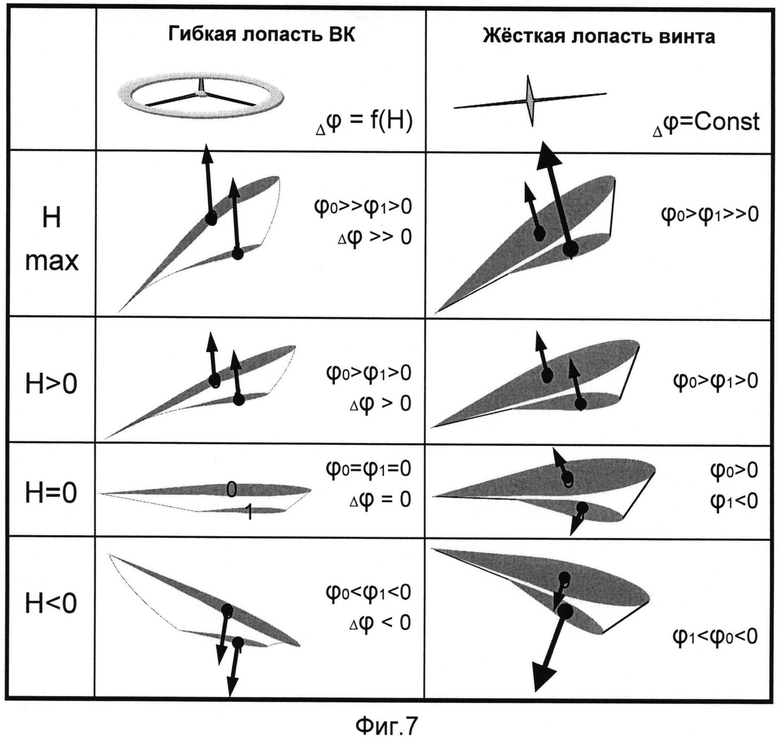
Фиг.7. Таблица сравнения режимов работы гибкой лопасти воздушного колеса и жесткой лопасти винта, где 0 - сечение комля, 1 - сечение конца.
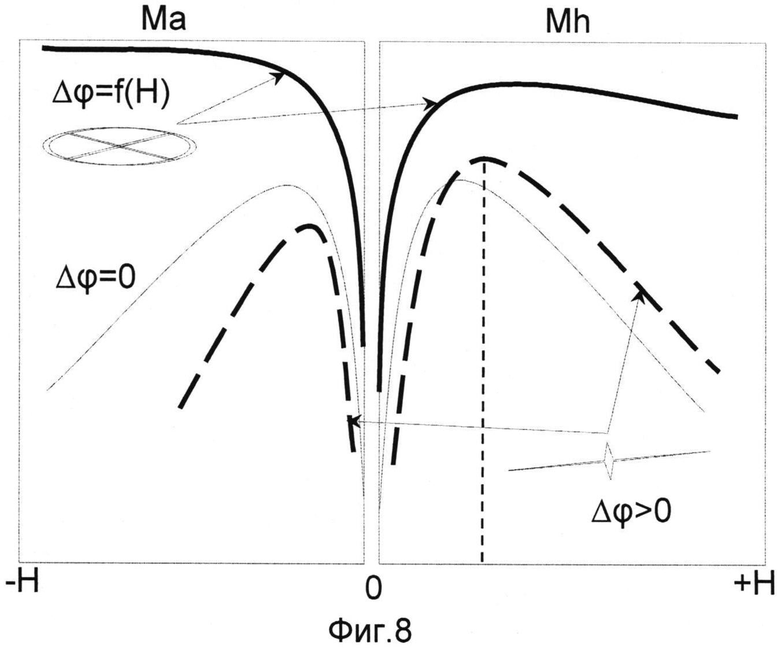
Фиг.8. Диаграмма сравнения совершенства воздушного колеса и винта,
изменение относительного КПД в зависимости от шага роторов.
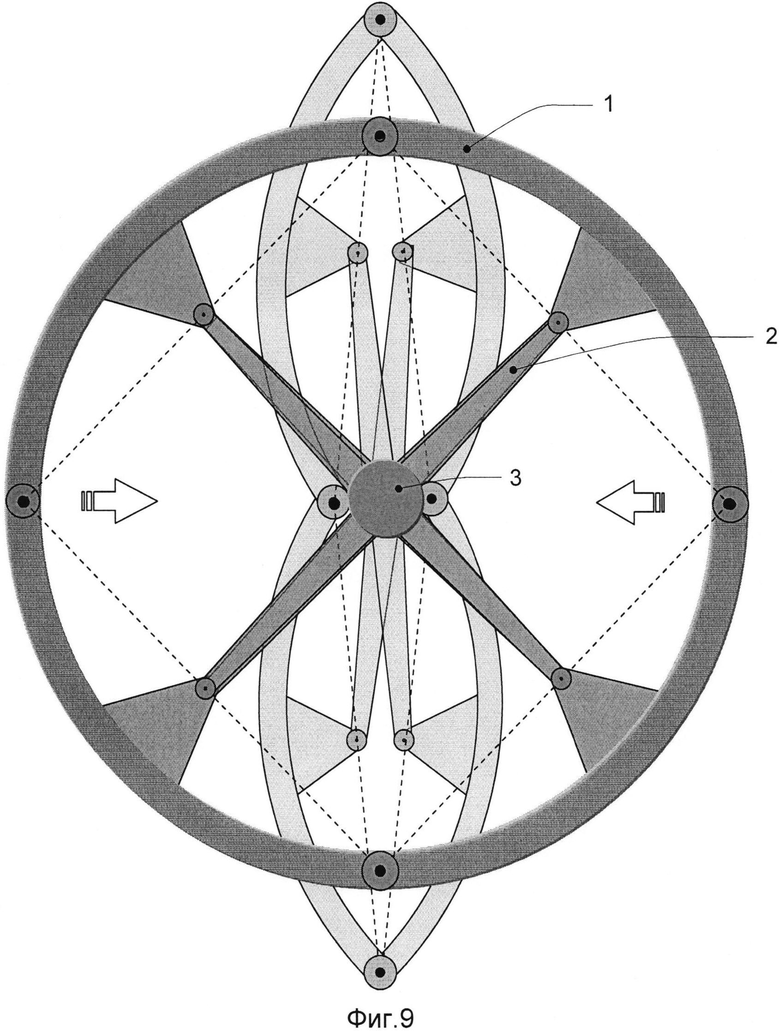
Фиг.9. Складное воздушное колесо с четырьмя втулками.
Вид сверху в сложенном и развернутом положении.
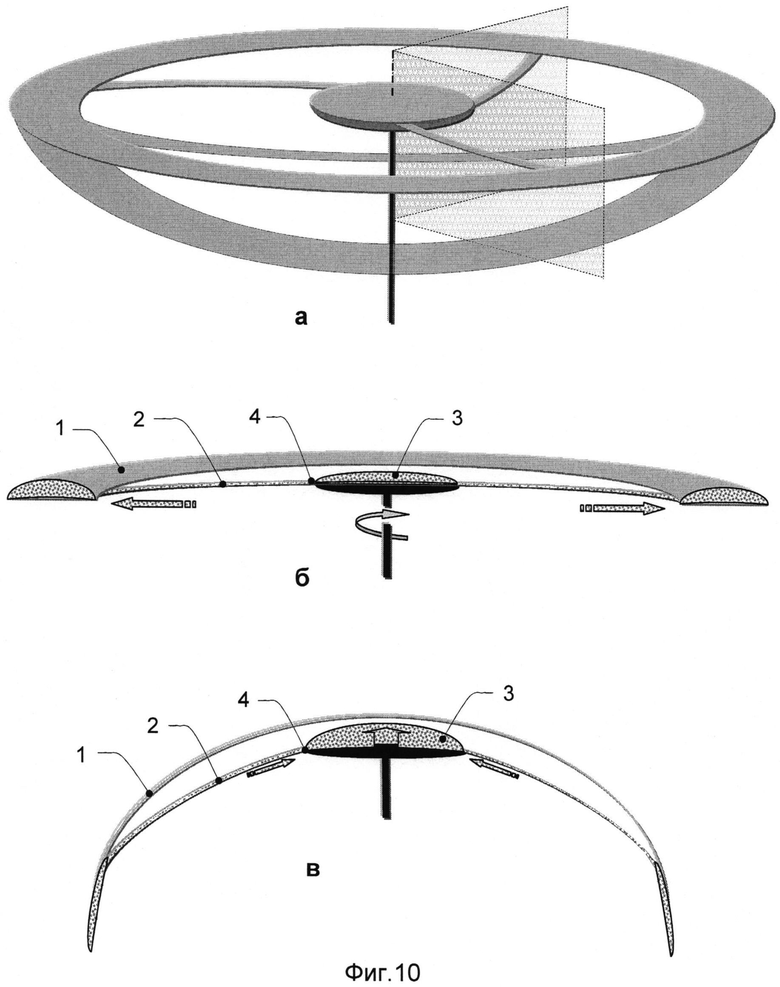
Фиг.10. Гибкое полое воздушное колесо с одной втулкой.
а) Общий вид в аксонометрической проекции.
б) Сечение гибкого воздушного колеса в полетном состоянии.
в) Сечение гибкого воздушного колеса в сложенном состоянии.
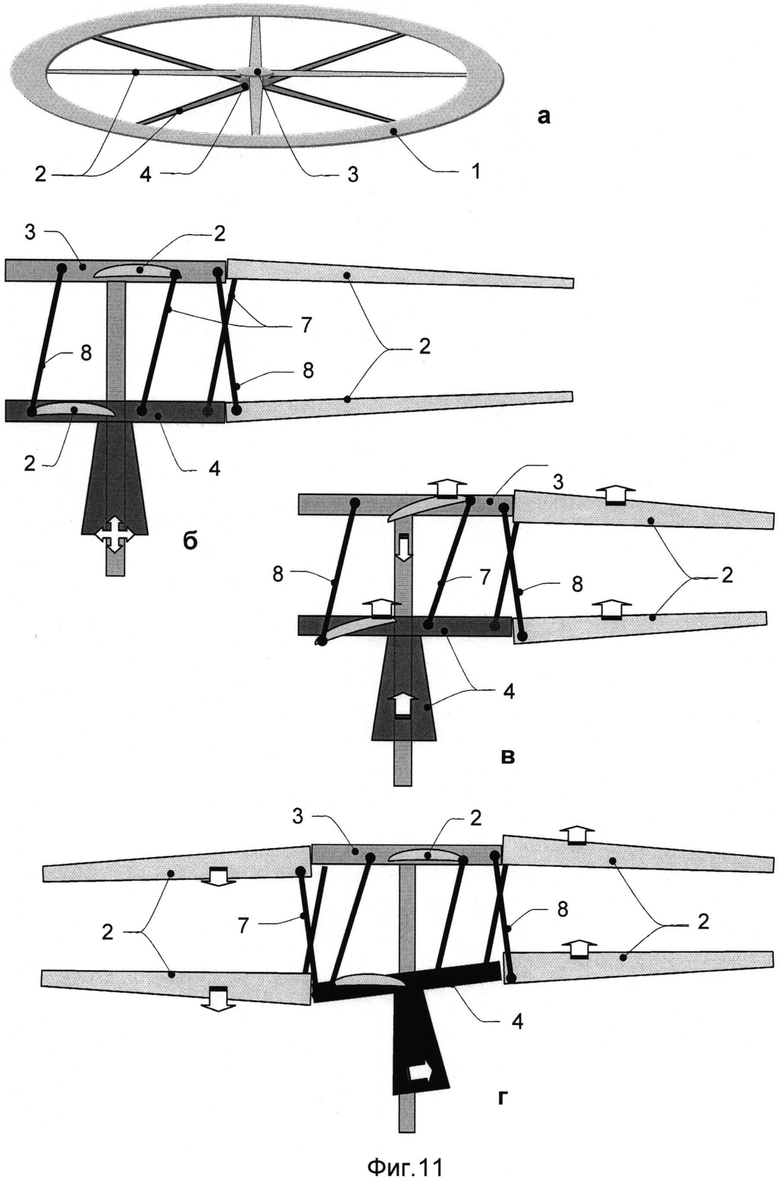
Фиг.11. Автомат перекоса №1 жесткого воздушного колеса с двумя втулками:
а) Общий вид в аксонометрии.
б) Исходное положение - нулевой шаг.
в) Управление общим шагом.
г) Управление циклическим шагом.
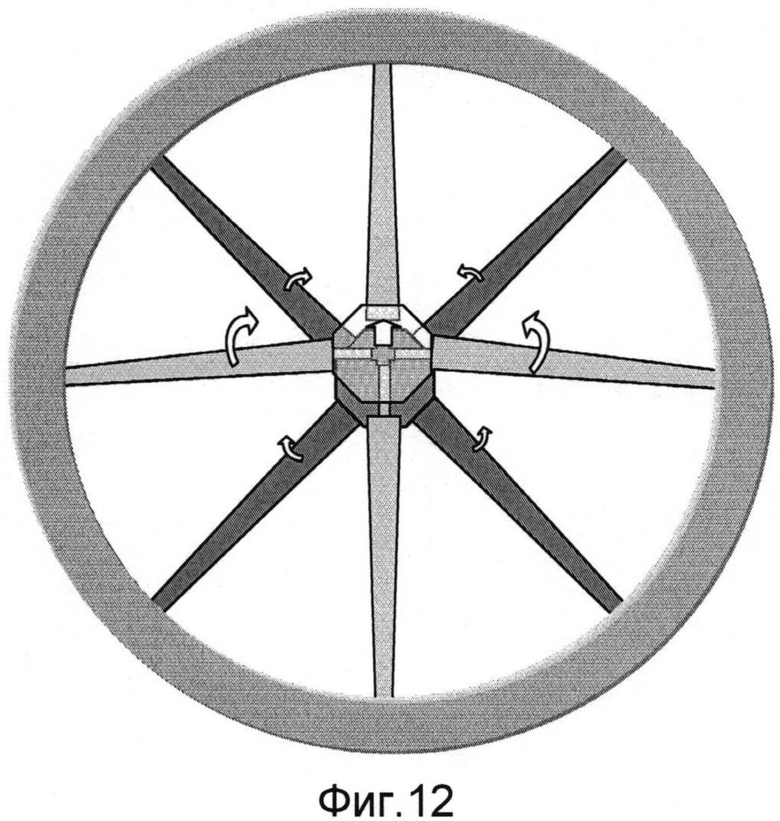
Варианты нежесткого воздушного колеса с двумя втулками вид сверху.
Фиг.12. Нежесткое воздушное колесо с двумя втулками с подвижным продольным осевым смещением лопастей относительно втулки.
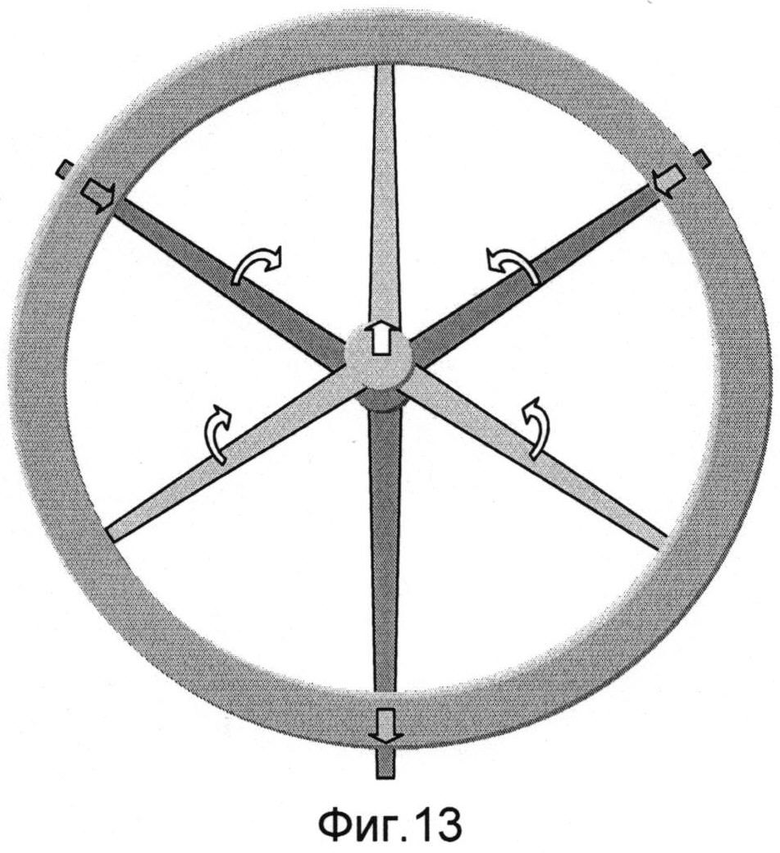
Фиг.13. Нежесткое воздушное колесо с двумя втулками со скользящим продольным креплением вершины лопастей к внешнему крылу.
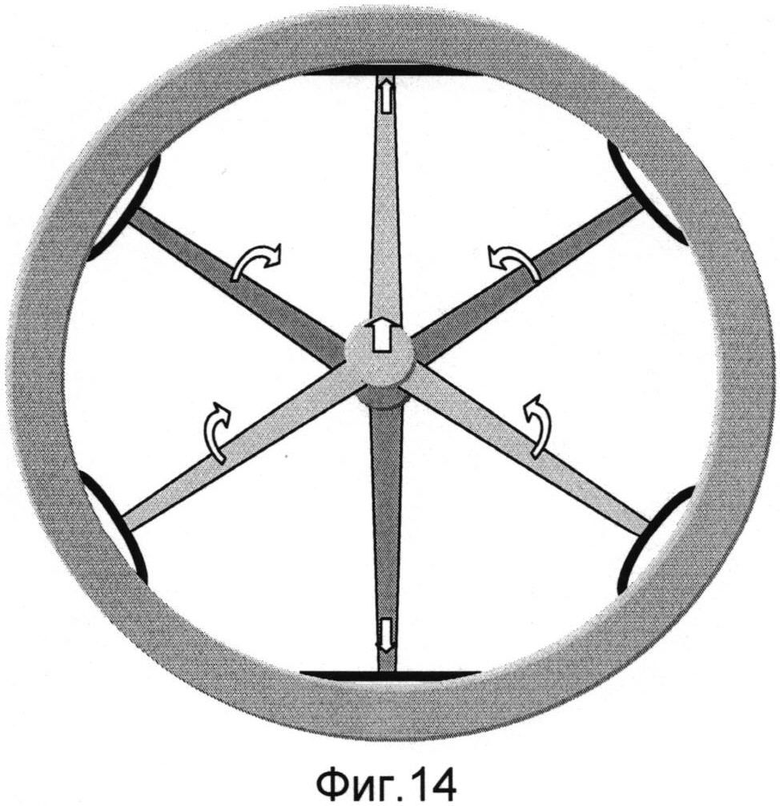
Фиг.14. Нежесткое воздушное колесо с двумя втулками с подвижным упругим креплением вершины лопастей к внешнему крылу.
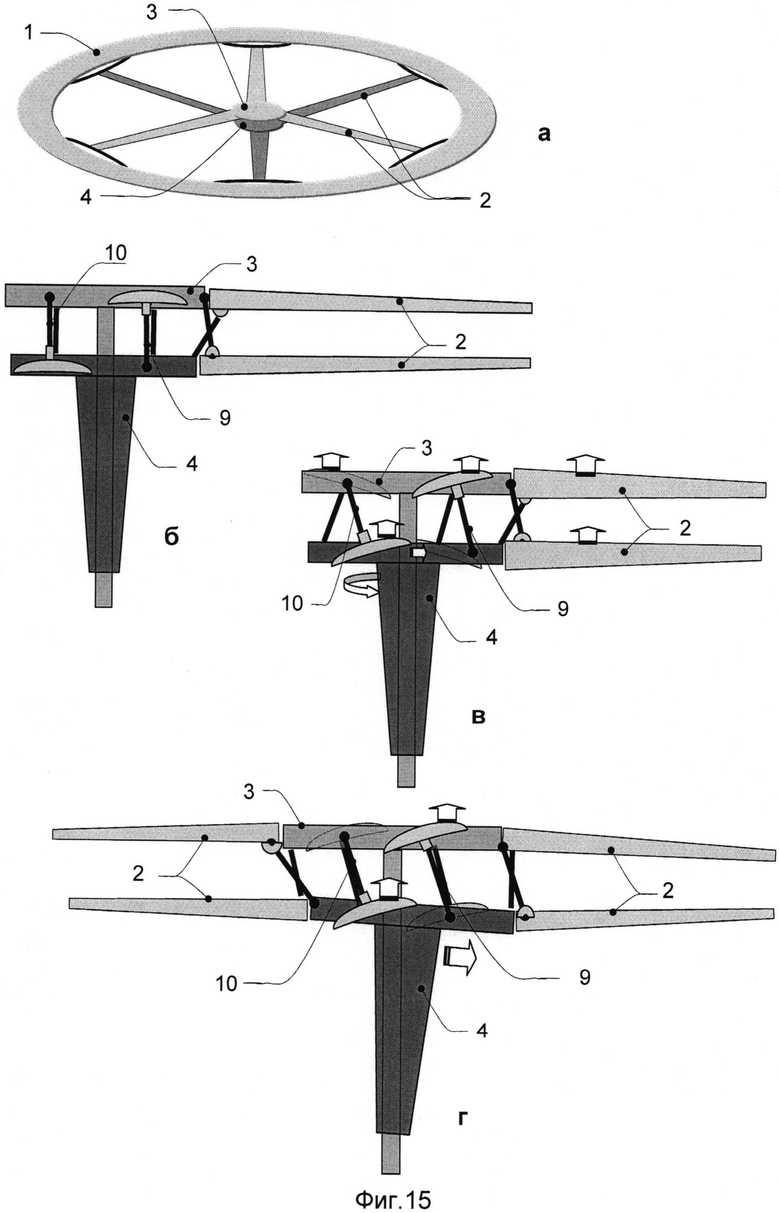
Фиг.15. Автомат перекоса №2 нежесткого воздушного колеса с двумя втулками.
а) Общий вид в аксонометрии. б) Исходное положение - нулевой шаг.
в) Управление общим шагом. г) Управление циклическим шагом.
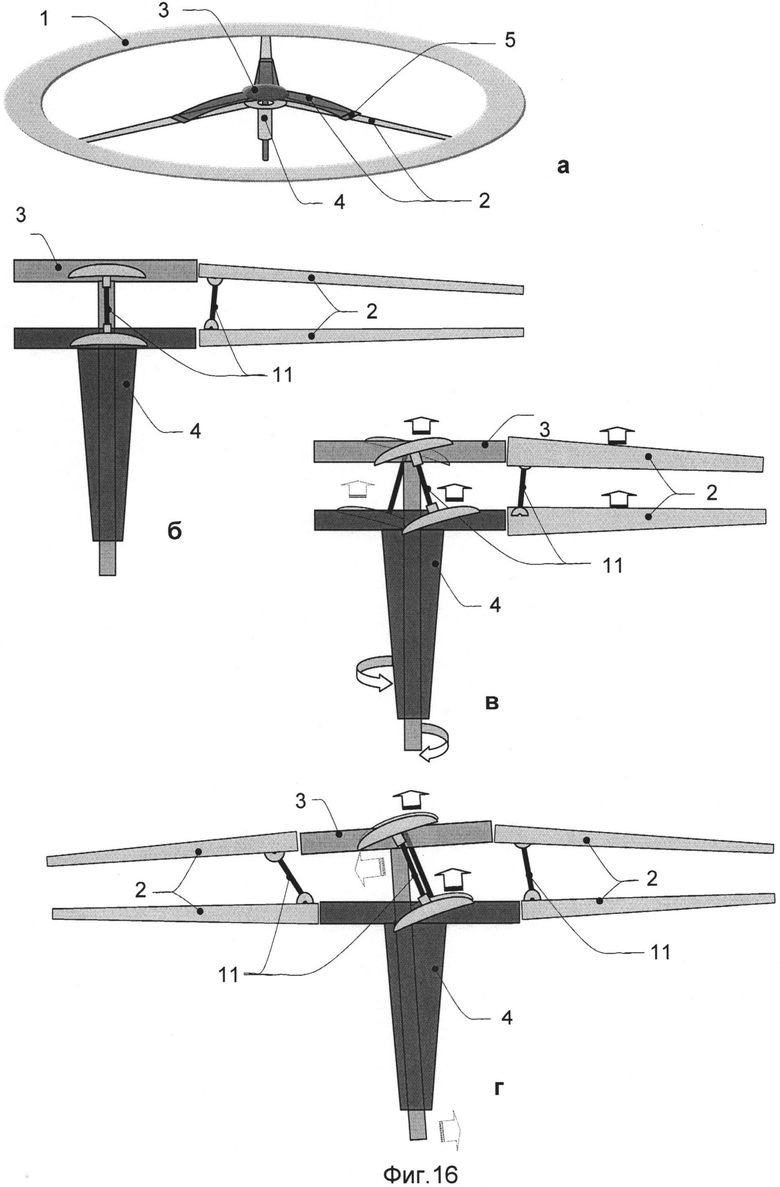
Фиг.16. Автомат перекоса №3 нежесткого воздушного колеса со скользящим продольным сочленением лопастей двух разнесенных втулок.
а) Общий вид в аксонометрии. б) Исходное положение - нулевой шаг.
в) Управление общим шагом. г) Управление циклическим шагом.
Варианты применения воздушного колеса.
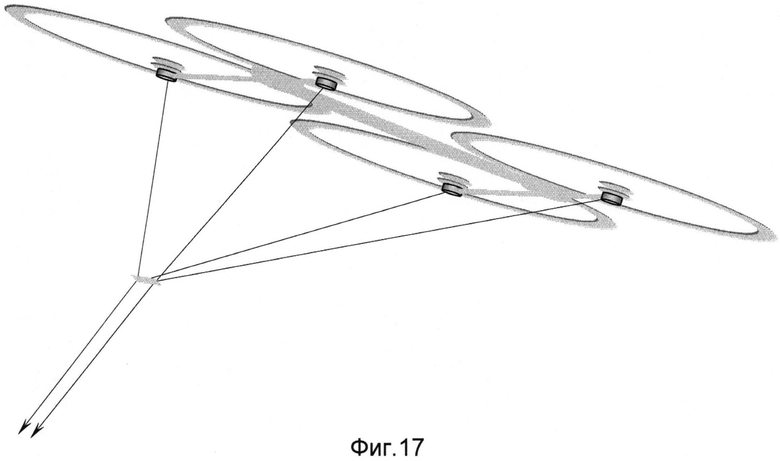
Фиг.17. Высотная ветроэнергетическая установка с воздушными колесами.
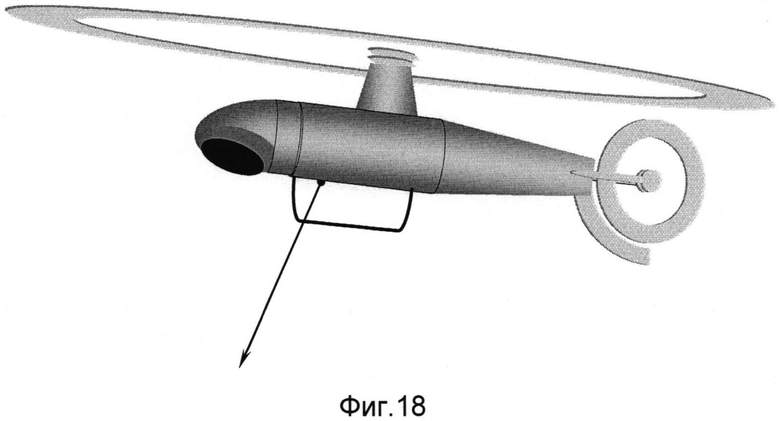
Фиг.18. Привязная высотная гиростабилизированная камера наблюдения.
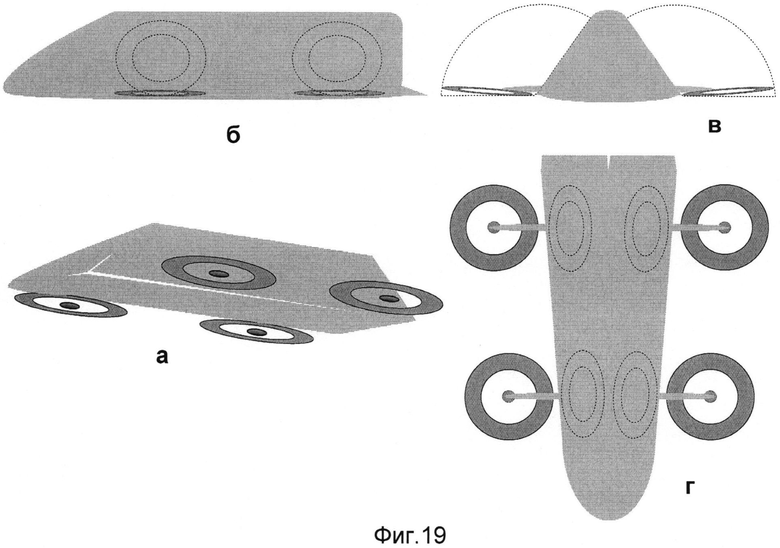
Фиг.19. Роторная система мягкой вертикальной посадки - «квадрокоптер».
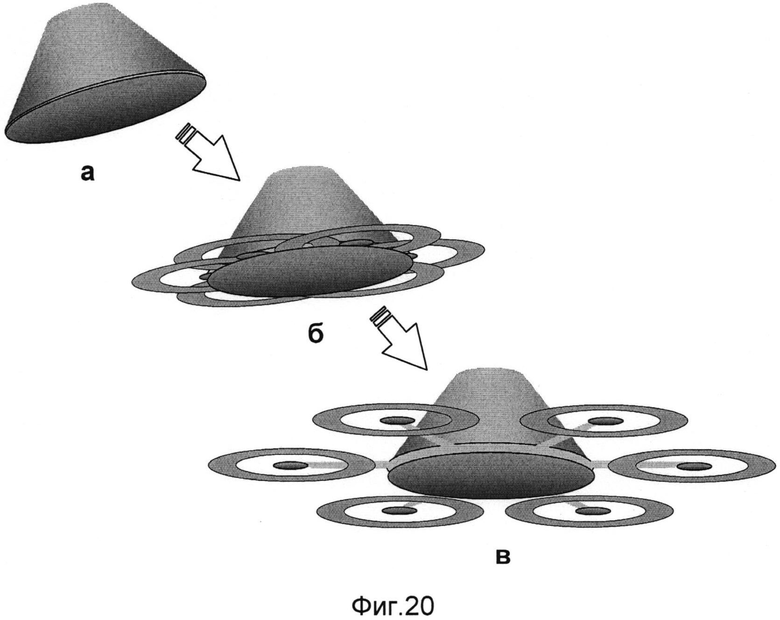
Фиг.20. Роторная система мягкой вертикальной посадки - «гексокоптер».
Гиролеты с несущим воздушным колесом.
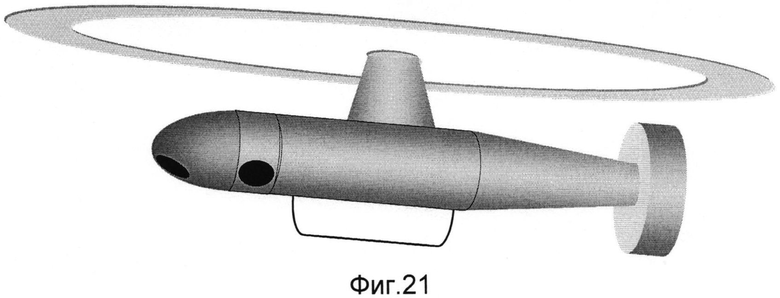
Фиг.21. Беспилотный гиролет с толкающим маршевым винтом.
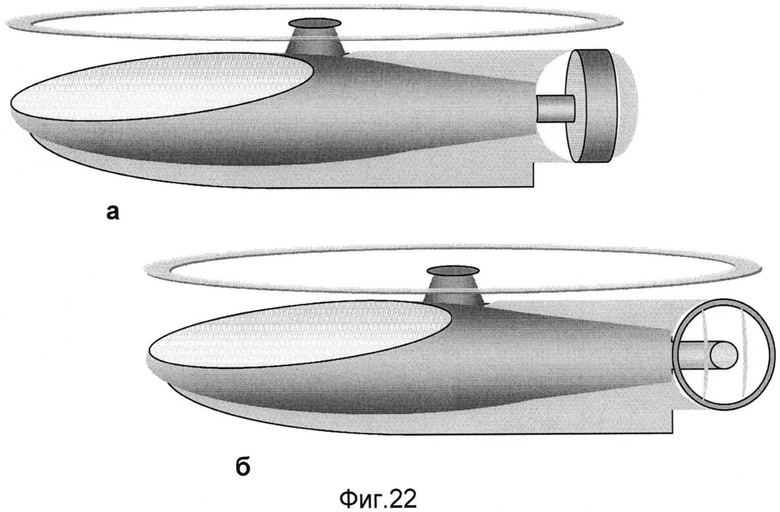
Фиг.22. Гиролет с поворотным толкающим маршевым винтом.
а) в горизонтальном полете; б) в вертолетном режиме.
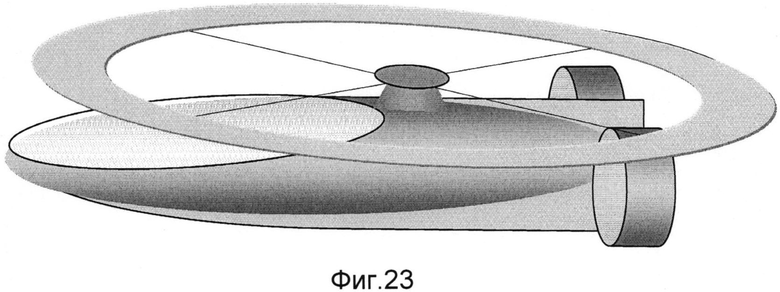
Фиг.23. Гиролет с двумя разнесенными маршевыми винтами.
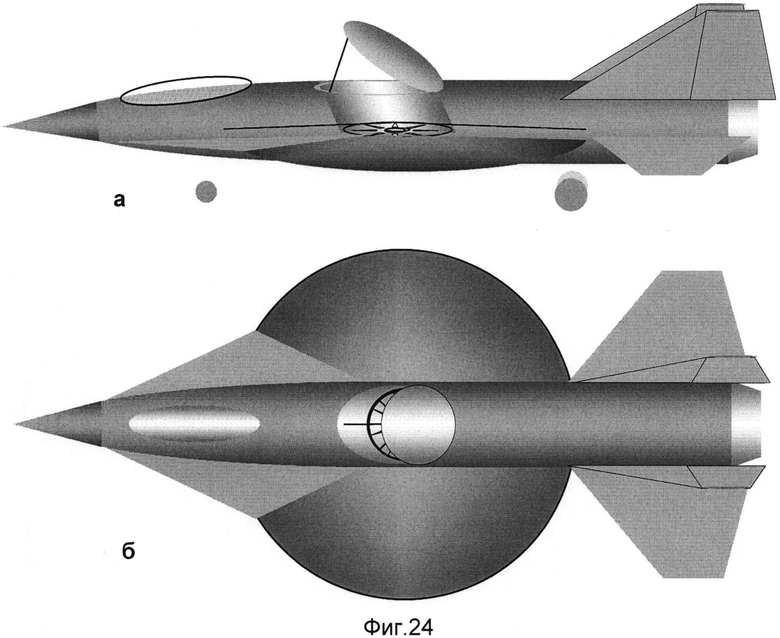
Фиг.24. Гиролет с подъемным туннельным вентилятором:
а) вид сбоку; б) вид сверху.
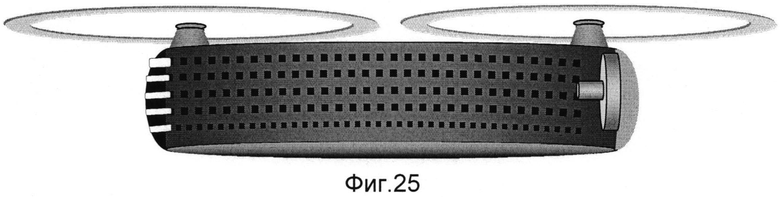
Фиг.25. Тяжелый гиролет с двумя воздушными колесами продольной схемы.
Воздушное колесо.
Воздушное колесо (фиг.1, 2, 3) состоит из замкнутого крыла 1, лопастей 2 и втулок 3. Замкнутое крыло имеет произвольную трехмерную форму, преимущественно осесимметричную (фиг.3), и произвольную конусность, от плоского (фиг.3а) до цилиндрического (фиг.3в). Гладкое кольцеобразное крыло имеет минимальное сопротивление формы. Возможны варианты с одной втулкой, с двумя (фиг.4) втулками 3, 4, до нескольких втулок на каждую лопасть. Воздушное колесо может иметь один или несколько коаксиальных валов.
Несущий ротор имеет профилированное крыло 1, с небольшой конусностью, которое соединяет концы лопастей 2 ротора и выполняет несколько функций:
1. Конструктивный элемент прочности несущего винта.
2. Массивный маховик, запасающий и выдающий энергию.
3. Крыло, создающее основную подъемную силу в скоростном полете.
4. Гироскоп, стабилизирующий ЛА.
Замкнутое крыло несущего воздушного колеса создает основную подъемную силу на высокой скорости полета, поэтому может иметь меньшую площадь и большее удлинение, чем крыло самолета. Моноблочное или монолитное крыло не имеет лонжерона и механизации, сильно натягивается центробежными силами, а потому: значительно тоньше фиксированного крыла, имеет меньшее профильное сопротивление и высокое аэродинамическое качество на больших скоростях. Тонкое вращающееся крыло обладает высокой жесткостью, динамической аэроупругостью, не подвержено флаттеру. Крыло и лопасти воздушного колеса могут быть исполнены из различных материалов, в том числе из тяжелой стали. Конусность и сложная осесимметричная форма крыла задается с учетом деформации от высоких центробежных нагрузок, для разгрузки крепления лопасти.
Втулка воздушного колеса избавлена от вертикальных и горизонтальных шарниров, может иметь значительный диаметр, для увеличения жесткости ротора. С этой целью воздушное колесо может иметь две разнесенные втулки (фиг.4а, б, в, г, д), при этом лопасти 2 комлем крепятся к разным втулкам 3, 4, а внешним концом на одно общее замкнутое крыло 1, как спицы велосипедного колеса. Конструкция получается легкая и жесткая.
Для снижения акустических шумов лопасти верхней и нижней втулки могут быть смещены по фазе, иметь разную стреловидность и изгибы. Возможен вариант с лопастями, имеющими подкосы или «расщепленную» комлевую часть с упругим или осевым шарнирным креплением к разным втулкам.
Жесткое в плане воздушное колесо всегда сбалансировано. В отличие от несущего винта с шарнирным креплением лопастей, при вращении не создает опасные вибрации, невозможен земной резонанс. Снимаются жесткие требования на изгибную и крутильную прочность лопастей, ниже нагрузки на трансмиссию, элементы управления, выше ресурс и надежность. Тонкие гибкие лопасти 2 воздушного колеса (фиг.5) натянуты как спицы, имеют бесшарнирное, упругое крепление 6 к крылу 1. Лишь в соединении втулки 3 и лопасти 2, при больших изменениях шага, возможен торсион, осевой или смещенный осевой шарнир 5. Лопасти с изменяемым шагом - торсионные, гибкие, с переменной круткой (фиг.6) и, возможно, с изменяемой кривизной профиля.
Винты не совершенны, являются компромиссным решением большого числа противоречивых требований. Несущие винты вертолета и автожира внешне схожи, но они принципиально отличаются направлением потока и соответственно геометрической круткой лопастей. Поэтому, вертолет плохо планирует, автожир трудно взлетает, оба имеют низкое аэродинамическое качество и проблемы с устойчивостью в скоростном полете. Жесткая, а потому толстая, лопасть любого винта может быть оптимизирована к одному конкретному шагу Н, и только в этом режиме имеет свой максимальный КПД (0.7-0.8 относительно идеального пропеллера). Малейшие изменения шага Н в одну или другую сторону увеличивают потери (Фиг.7) и еще более снижают невысокий КПД (Фиг.8).
Высокий КПД воздушного колеса, достигается комплексом мер.
Прежде всего, снижением профильного сопротивления, за счет уменьшения толщины профиля, применения несимметричных, совершенных профилей, а также высокой чистотой поверхности крыла и лопастей.
Бесшарнирное соединение 6 упругих лопастей 2 с внешним крылом 1 обеспечивает торсионным лопастям переменную крутку Δφ (Фиг.5). Если коэффициент жесткости лопастей на кручение постоянен вдоль радиуса, то крутка будет линейной. Возможно очень близкое приближение к идеальной гиперболической крутке лопастей на любых режимах, в очень широком диапазоне, и положительного, и отрицательного шага Н. Это обеспечивает переменную жесткость на кручение вдоль лопастей, когда она растет от комля к вершине, и резко уменьшается в сочленении с крылом (Фиг.6). Так как форма идеальной лопасти противоречит распределению жесткости вдоль радиуса, лопасть может быть выполнена из гибкого, пластичного материала с внутренним силовым лонжероном - профилированным торсионом или набором с переменным сечением и жесткостью (Фиг.5, 6).
Важное отличие воздушного колеса от винтов - возможность изменения шага лопастей в очень широком диапазоне отрицательных и положительных углов установки. Внешнее замкнутое крыло не только снижает концевые потери, но добавляя опору концам, позволяет торсионным лопастям иметь близкую к идеальной геометрическую крутку (Фиг.7), а значит, равномерное распределение нагрузки по длине лопасти. Удается получить предельно высокий КПД ротора на всех режимах (Фиг.8): и в пропеллерном, и на авторотации, и в режиме ветротурбины, при минимальном профильном сопротивлении в скоростном полете.
На доступных больших углах атаки, прямые тонкие профили не эффективны. У натянутых лопастей легко реализуются жесткие фиксированные носки и отклоняемые закрылки. Тонкая лопасть из гибкого пластичного материала с несколькими упругими лонжеронами заданной жесткости может сгибаться, меняя кривизну аэродинамического профиля (Фиг.7). Отсутствие горизонтальных и вертикальных шарниров упрощает возможность крепления одной лопасти к двум или нескольким разным подвижным втулкам.
Возрастает аэродинамическое качество ротора и в скоростном горизонтальном полете. Тонкое замкнутое крыло создает основную подъемную силу, уменьшает аэродинамическое сопротивление тонких лопастей, разгружает лопасти, позволяет снижать скорость вращения ротора, исключает условия образования волнового кризиса на наступающих и срыв потока на отступающих лопастях. Обтекаемое упруго-вязкое соединение лопастей с внешним крылом исключает крутильные колебания и флаттер концов, уменьшает акустический шум и потери от краевых эффектов.
Частный случай воздушного колеса - туннельный подъемный вентилятор (фиг.2). Сечение крыла приближено к равнопрочному диску имеет почти треугольный профиль: острый или закругленный тонкий внешний край и более широкий внутренний. Короткие лопасти могут быть жесткими, с переменным или фиксированным шагом. Плоскостей крепления лопастей и к втулке, и к внешнему крылу может быть несколько. Жесткая лопасть переменного шага имеет управляемый закрылок, или целиком вращается на оси (спице-торсионе), соединяющей втулку с крылом. Тяга ротора с фиксированными жесткими лопастями может регулироваться управляемым направляющим и спрямляющим аппаратом. Направление тяги может изменяться аэродинамическими щитками.
Воздушное колесо допускает размещение во вращающемся роторе: топлива, аккумуляторов, топливных элементов, двигателей, реактивных сопел, панелей солнечных батарей, датчиков, антенн, балансиров, сигнальных огней, противообледенительных систем и других элементов аппаратуры и конструкции.
Пожалуй, главный недостаток воздушного колеса - большие фиксированные габариты. Возможны разборные и складные варианты (фиг.9). Проблему решает плоское гибкое воздушное колесо (фиг.10а), которое позволяет сгибать ротор на земле. Ротор приобретает необходимую жесткость динамически, при вращении. Увеличивается жесткость воздушного колеса и при заполнении внутреннего объема полого крыла газом или жидкостью под высоким давлением (фиг.10б). При вращении ротора жидкость из бака по каналу вала, или из емкости 3 на втулке, через клапаны 4, по каналам 2 в лопастях поступает в крыло 1 под высоким центробежным давлением. Клапаны 4 сохраняют высокую жесткость воздушного колеса при любых оборотах в полете. На земле управляемый перепускной клапан 4 возвращает ротору гибкость (фиг.10в). В варианте колеса с двумя втулками, жесткость увеличивается при разнесении втулок.
Лопасти винта могут иметь саблевидную форму (фиг.3а) или смещенные осевые шарниры в плоскости вращения, но под углом к оси лопасти, что позволяет автоматически выравнивать плоскость вращения ротора относительно положения вала. Опущенный конец лопасти увеличивает угол атаки, а поднятый соответственно уменьшает. В итоге, снижается нагрузка на втулку и вал ротора.
Автоматы перекоса
Общий и циклический шаг несущих винтов задается автоматом перекоса (АП). Известны различные конструкции автоматов перекоса: кольцевого (тарельчатого) типа, типа «паук», кривошипного типа и др. Для воздушного колеса возможно использование практически всех известных типов АП. Для воздушных колес с двумя втулками (фиг.4), кроме известных, возможны и новые конструкции АП. Новые варианты основаны на управлении общим и циклическим углом атаки лопасти, без внешних тяг, исключительно положением двух разнесенных втулок (фиг.11, 15, 16), например:
Вариант АП №1. Управление шагом жесткого воздушного колеса (фиг.11).
В воздушном колесе с двумя втулками каждая лопасть 2 имеет осевой шарнир или упругое соединение с втулкой (на фигурах не показано) и тяги 5, 6, но не на внешнее управление, а на соседнюю втулку 3 или 4. Так, например (фиг.11б), если шарнирные тяги 7 соединяют переднюю часть лопасти верхней втулки с нижней втулкой 4, а тяга 8 - хвостовую часть лопасти нижней втулки с верхней втулкой 3, то положение втулок определяет угол атаки лопастей 2 и, соответственно, общий (фиг.11в) и циклический (фиг.11г) шаг ротора. Рычаги поворота лопастей близки к плоскости лопастей. Этот вариант похож и работает как традиционный тарельчатый автомат перекоса Юрьева.
Относительное угловое положение подвижных втулок может использоваться для изменения общего шага, или может быть фиксировано шлицевым соединением, промежуточной муфтой или другой связью. Возможно применение пружин гидравлического или электрического привода для развода втулок в механизме управления шагом лопастей.
Возможно изменение шага как упругой торсионной лопасти целиком, так и ее части, например, гибкого или сочлененного закрылка при фиксированном положении носка лопасти. Таким образом, реализуется изменение кривизны тонкого гибкого профиля лопасти. Отклонение закрылка позволяет задавать большее смещение для упреждающего управления циклическим шагом лопасти.
Воздушное колесо с двумя втулками может быть и «нежестким». Например:
- Крепление комля лопасти к втулке с подвижным продольным осевым смещением (фиг.12).
- Воздушное колесо со скользящим продольным креплением вершины лопастей к внешнему крылу (фиг.13).
- Воздушное колесо с подвижным упругим креплением вершины лопастей к внешнему крылу (фиг.14). Вариант наименее чувствительный к деформации крыла от центробежных нагрузок.
- Телескопические лопасти и т.д.
Подвижное соединение лопастей уменьшает жесткость воздушного колеса, что позволяет наклоном вала относительно перпендикуляра к плоскости крыла задавать циклический шаг лопастям с упреждением.
Вариант АП №2. Управление шагом нежесткого воздушного колеса с двумя втулками (фиг.15).
Похожий на первый вариант, но (фиг.15б) рычаги поворота лопастей 9 и 10 почти перпендикулярны плоскостям лопастей 2. Тяги 9 и 10 могут иметь две степени свободы в креплении с втулкой, и только одну в креплении с лопастью:
свободный наклон - вдоль лопасти, поворот - вместе с лопастью в осевом шарнире. Тяги могут быть телескопическими и наклонными. Смещение втулок 3, 4, поперечное осям лопастей, вызывает изменение угла атаки. Продольное смещение принимают различные варианты скользящего соединения. Общий шаг задается поворотом, относительным угловым положением втулок вокруг оси вращения (фиг.15в), а циклический шаг - горизонтальным смещением втулок (фиг.15г), разносом осей вращения втулок.
Вариант АП №3. Для нежесткого воздушного колеса (фиг.16а) со скользящим продольным сочленением 5 двух лопастей 2 от двух разнесенных втулок 3 и 4, количество тяг можно уменьшать вдвое, при соединении лопастей рычагами 11 напрямую (фиг.16б, в, г).
Циклический шаг винта, с упреждением, задает наклон вала и/или относительное горизонтальное смещение втулок (фиг.11г, 15г, 16г).
Управление общим шагом винта задается угловым положением втулок. Относительный поворот, отставание фазы верхней втулки относительно нижней увеличивает угол атаки всех лопастей и шаг ротора (фиг.11в, 15в, 16в). И наоборот, опережение фазы верхней втулки относительно фазы нижней уменьшает шаг.
Угловое положение разных втулок воздушного колеса связано через длинные гибкие лопасти и обладает значительной эластичностью, даже у жестких колес. Возможно применение разгрузочных пружин и гибких муфт, допускающих наклон втулок.
Очень просто управление общим шагом несущих и маршевых роторов, воздушное колесо задается угловым положением втулок через приводы коаксиальных валов. В этом случае подача большего крутящего момента на нижнюю втулку увеличивает общий шаг (фиг.15г, 16г), переводит несущий ротор из авторотации в вертолетный режим. И наоборот, торможение нижней втулки, или больший привод на верхнюю переводит ротор в режим ветротурбины. Подача крутящего момента одновременно на обе втулки раскручивает воздушное колесо с нулевым шагом и минимальным сопротивлением.
Вариант АП №4. Возможно автоматическое управление циклическим шагом и плоскостью вращения ротора, полностью без дополнительных элементов, с использованием лопастей со смещенным осевым шарниром. У воздушного колеса с двумя втулками, осевой шарнир в соединении втулки с лопастью, под углом к плоскости вращения, в ответ на поворот или смещение втулок изменяет углы атаки лопастей, без отдельных рычагов и тяг (фиг.12, 13, 14). В этом случае рычагом является внешний конец лопасти, не лежащий на оси осевого шарнира.
Области применения
Воздушное колесо с замкнутым крылом большой конусности может иметь широкое применение как воздушный маршевый винт - импеллер или ротор ветротурбины. В воде такое колесо работает как малошумный гребной винт или прочный ротор гидротурбины.
Например: ветроэнергетическая установка может использовать воздушное колесо с цилиндрическим крылом и горизонтальным валом. В данном варианте обод позволяет многократно увеличить диаметр ротора и единичную мощность, при этом снизить шум, вес и стоимость ветроэнергетической установки. Замкнутое крыло в качестве ротора генератора позволяет полностью избавиться от редуктора и опустить тяжелый статор генератора с башни на землю. Управляемые лопасти облегчают пуск, позволяют поддерживать стабильную частоту вращения, независимо от нагрузки и силы ветра.
Воздушное колесо с плоским замкнутым крылом малой конусности наиболее эффективно как несущий ротор в режиме авторотации, например:
Возможно применение воздушного колеса в качестве несущего ротора привязной высотной ветроэнергетической установки (фиг.17). Преимущества в сравнении с прототипом, US 6781254 В2 от 24.08.2004 ″Windmill kite″ - летающим генератором с винтами традиционной конструкции:
- Возможность увеличения диаметра ротора и единичной мощности.
- Выше КПД, высота полета, производительность, ресурс и надежность.
- Шире рабочий диапазон по силе ветра. Всепогодность.
- Меньше акустический шум.
- Высокая стабильность параметров тока при порывах ветра.
- Гироскопическая стабилизация платформы.
- Надежный вертикальный запуск и мягкая вертикальная посадка.
- Более низкая стоимость ротора и ветроэнергетической установки.
- Замкнутое крыло может служить ротором электрогенератора, что избавляет от механических редукторов и снижает вес установки.
Высокое аэродинамическое качество несущего воздушного колеса, с узким замкнутым крылом большого удлинения допускает возможность построения ЛА без силовой установки - гиропланера (gyrorlider). Гиропланер может быть привязным и свободнолетающим, микроскопическим и сверхтяжелым.
Беспилотный привязной гиропланер (фиг.18) имеет два ротора: несущий и рулевой, надежно гиростабилизирован в двух плоскостях. Он стартует от наземного пускового устройства стартовой раскрутки ротора, внешнего источника энергии или бортовых аккумуляторов. На высоте получает энергию от авторотирующего воздушного колеса, а по длинному легкому оптоволоконному кабелю ведет передачу данных и принимает сигналы управления. Высокоскоростной, надежный канал связи полностью защищен. Диэлектрический оптоволоконный кабель не подвержен атмосферным разрядам. Всепогодный, бесшумный, автономный ЛА предельно прост и надежен, не нуждается в пилотировании, автоматически следует за мобильным пользователем, транспортным средством, судном. Не имеет проблем с возвратом и посадкой. На высоте, где не бывает длительного полного штиля, время дежурства такого БПЛА связи и/или наблюдения неограниченно.
Применение воздушного колеса в качестве ротошюта - бескупольной системы посадки модулей космических аппаратов (фиг.19, 20) и десантируемых грузов, имеет явные преимущества над другими системами посадки в атмосфере:
- Возможность маневра и точная вертикальная посадка в заданное место.
- Всепогодность, надежность мягкой посадки. Силовая гироскопическая стабилизация спускаемого аппарата упрощает систему управления.
- Минимальный вес и компактность при высокой нагрузке на ротор.
Самое широкое применение воздушного колеса возможно в качестве несущего ротора летательных аппаратов вертикального взлета и посадки (ЛА ВВП). Так как термин ″гироплан″ используется как синоним автожира, введем сокращенное название для гиростабилизированных летательных аппаратов, использующих воздушное колесо - гиролет.
Гиролет
Гиролет - ЛА ВВП, разновидность винтокрылов (англ. compound helicopter). Вместо единой несущей и движущей системы (у вертолета) гиролет имеет две: одна - несущий ротор, исключительно, для создания подъемной силы, вторая - маршевая для продвижения (фиг.21-25). На взлете, при посадке и на малых скоростях подъемную силу создают лопасти воздушного колеса. В скоростном горизонтальном полете, основную подъемную силу создает крыло, но не фиксированное прямое, а вращающееся замкнутое.
Гиролет конструктивно имеет:
- Воздушное колесо, как несущий ротор или туннельный вентилятор, одно или несколько.
- Обтекаемый несущий фюзеляж с развитой боковой проекцией.
- Силовую установку, с постоянным приводом на один или несколько маршевых винтов, и подключаемым приводом на воздушное колесо.
- Управляемое вертикальное и горизонтальное хвостовое оперение.
- Посадочное устройство: колесное или полозковое шасси, баллоны и пр.
Вал вращения воздушного колеса установлен вертикально, на подшипниках крепится к фюзеляжу (рамс). Управление гиролетом по курсу производится рулем направления в потоке маршевого винта (фиг.22а), поворотным маршевым винтом (фиг.22б) или парой разнесенных маршевых винтов (фиг.23). Повороты происходят с аэродинамическим внешним скольжением на развитой боковой проекции фюзеляжа.
Двигатель напрямую (или через небольшой понижающий редуктор) связан с маршевым винтом, а также имеет подключаемый привод (механический вариатор, гидропривод, электрический привод, реактивный привод), для раскрутки воздушного колеса. Силовая установка гиролета может иметь:
- электрический привод - для сверхлегких электрогиролетов;
- поршневой двигатель - для легких и экономичных гиролетов;
- газотурбинный двигатель - для тяжелых и скоростных ЛА ВВП;
- гибридный привод, разный привод для маршевых и несущих винтов.
В варианте электрогиролета рационально размещение аккумуляторов или топливных элементов на крыле воздушного колеса. Такой вариант размещения:
снижает вес ЛА, увеличивает удельную емкость аккумуляторов на 45 КДж/кг и более, обеспечивает хорошее охлаждение, одновременно является противообледенительной защитой несущего ротора.
Жесткое воздушное колесо допускает прямой электрический привод к массивному крылу, без промежуточных валов и редукторов. Наиболее рационален такой привод в двухротороной поперечной схеме, и для миниатюрных, и для сверхтяжелых гиролетов.
Возможен шумный реактивный привод воздушного колеса. Сжатый воздух от компрессора, через полые вал и лопасти, подается к соплам, или к камерам сгорания на периферии ротора.
Замкнутое крыло ротора можно использовать для хранения топлива - сжиженного газа. Размещение в полости крыла жидкого топлива сопряжено с проблемой его извлечения, возможно в случае остановки ротора, или размещения там же топливных элементов, или при реактивном приводе с дожиганием топлива.
На малых скоростях подъемную силу и управляемость лучше обеспечивает винт, на больших - эффективнее крыло. В зависимости от относительной ширины крыла, воздушное колесо больше винт (фиг.1) или крыло (фиг.2), и соответственно, гиролет ближе к винтокрылам, или к самолетам. В качестве меры близости можно использовать коэффициент заполнения, как отношение площади ротора к сметаемой площади, отношение внутреннего диаметра к внешнему, или удлинение замкнутого крыла. Рассмотрим крайние варианты.
Узкое кольцо образует крыло с максимальным удлинением, что подходит легким маломощным автожирам. Кольцо замыкает нагрузки, укрепляет конструкцию несущего винта, повышает безопасность, надежность и ресурс. Повышается аэродинамическое качество ротора и максимальная допустимая скорость. Легкое крыло не влияет на маневренность, управление возможно без автомата перекоса, непосредственно наклоном плоскости вращения ротора. Легкое кольцо позволяет автожиру осуществлять прыжковый взлет, более массивное крыло обеспечивает ему полноценный вертикальный подъем. Высота взлета пропорциональна относительной массе маховика.
Максимальное увеличение относительной ширины крыла превращает воздушное колесо в плоское дискообразное вращающееся крыло с вентилятором внутри (фиг.2), что наиболее подходит скоростным самолетам вертикального взлета и посадки. По такой схеме может быть реализован среднеплан с туннельным вентилятором внутри фюзеляжа, вблизи центра масс (фиг.24). Скоростью звука ограничена линейная скорость лопастей вентилятора, а линейная скорость периферии диска может ее многократно превышать, ограничена прочностью материала. В этом случае крыло выполняется намоткой из металлической проволоки, лент, или композитных волокнистых неметаллических материалов. Использование кевлара и графитоволокна позволяет достигать скоростей более 1000 м/с. На высоких скоростях следует учитывать кинетический нагрев ротора.
Большой запас энергии и располагаемой мощности дает возможность быстрого вертикального взлета с использованием одного небольшого вентилятора. Вращающийся ротор при взлете и посадке обеспечивает аппарату надежную силовую продольную и поперечную устойчивость, без сложных систем управления и стабилизации. Тяга регулируется изменением шага лопастей вентилятора, и/или подвижными направляющим и спрямляющим аппаратами. Холодный поток не прожигает площадку или палубу. После взлета самолета, для повышения маневренности, ротор может быть остановлен и зафиксирован. Перед посадкой, встречный напор и двигатель повторно раскручивают ротор. Реактивный момент, при авторотации и реактивном приводе ротора - не создастся, а при механической раскрутке в полете парируется стабилизатором и отклонением вектора тяги маршевого двигателя. Полное устранение реактивного момента возможно применением двух роторов противоположного вращения, с продольным, поперечным или соосным размещением.
Применение воздушного колеса универсально для ЛА ВВП, от безмоторных гиропланеров до реактивных сверхзвуковых самолетов, масштабируемо, от электрических миниатюрных беспилотных ЛА до сверхтяжелых многороторных транспортных гиролетов.
Теоретический предел грузоподъемности одновинтовых вертолетов около 35 тонн, а практически, это вертолет МИ-26, который поднимает 25 тонн. Первое ограничение - диаметр несущего винта, длинные лопасти свисают до земли и до хвостовой балки. Второе ограничение - предел мощности редуктора и двигателей в единой силовой установке. Воздушное колесо не имеет таких ограничений, потому может иметь на одном роторе более 100 тонн грузоподъемности. Гиролет с двумя роторами может быть продольной, поперечной и сосной схемы. В разнесенных многороторных схемах воздушным колесам не нужны мощные синхронизирующие валы, ниже требования к мощности редукторов, проще распределенная силовая установка (фиг.25). Прямой электромагнитный привод на крыло воздушного колеса избавляет ЛА от механических редукторов и трансмиссии.
Наземное пусковое устройство
Взлет любого ЛА - наиболее энергозатратный этап полета. Горизонтальному взлету самолета предшествует разгон по длинной взлетной полосе. Вертикальному взлету гиролета предшествует раскрутка массивного ротора. Это значительно проще и безопаснее, но тоже требует энергозатрат. На воздушное колесо ″закачивается″ большой объем энергии, в широком диапазоне скоростей вращения.
Для разгона маховика до линейной скорости 300 м/с, на каждые 80 кг массы, требуется не менее 1 кВт ч (3,6 МДж) энергии, без учета потерь. Двигатель мощностью 60 кВт совершает эту работу за одну минуту, но чем дольше разгон, тем выше аэродинамические потери. Для быстрой передачи этой энергии на воздушное колесо требуется мощный механический или гидравлический вариатор, коробка передач или мощный электромотор.
Целесообразно, не только ускорить запуск, сэкономить топливо, сберечь ресурс редуктора, но, что очень важно, сделать взлет менее шумным. Наземное пусковое устройство помогает быстро и бесшумно раскрутить массивный ротор. Для запуска безмоторных гиропланеров, такое устройство необходимо. Внешнее наземное/палубное пусковое устройство накапливает энергию, преобразует и передает воздушному колесу.
В населенных пунктах, на оборудованных площадках, как правило, доступен универсальный источник энергии - электросеть. Накопитель энергии позволяет сгладить большие пиковые нагрузки. Возможны произвольные варианты наземного (палубного) пускового устройства, в зависимости от способа накопления энергии, оно может быть: механическим, гидропневматическим, электрическим и прочим, например:
- Электродвигатель - маховик - вариатор - гиролет;
- Электрогидронасос - гидропневматический аккумулятор - гидромотор - гиролет;
- Зарядное устройство - конденсаторы - преобразователь - один или несколько мощных электродвигателей - гиролет.
Возможна раскрутка воздушного колеса без валов и редукторов, напрямую бегущим магнитным полем линейного двигателя. В этом случае замкнутое крыло является ротором электрического двигателя.
Для гиролетов с реактивным приводом ротора возможен запуск от пневматического аккумулятора. Запуск легких гиропланеров возможен вручную.
Наземное/палубное пусковое устройство может иметь систему управления, датчики заряда и скорости. Может производить наземную транспортировку гиролета, выполнять операции предполетного и послеполетного обслуживания, очистку, контроль, балансировку, противообледенительную обработку, нагрев ротора и прочее.
Вертикальный взлет
Лучше вертикального взлета может быть только - экономичный, всепогодный, устойчивый, безопасный, быстрый и бесшумный вертикальный подъем. Именно такой взлет обеспечивает воздушное колесо. Гиролету для старта не нужна ни взлетная полоса, ни мощный и шумный газотурбинный двигатель. Инерциальный привод не создает реактивного момента, поэтому не нужен рулевой винт - источник опасности и высокочастотных колебаний. Воздушное колесо - мощный кинетический накопитель, отличается от винта отсутствием вибрации и шума. До момента взлета тонкие лопасти установлены на нулевой шаг и принимают нулевую крутку, создают минимальные потери и шум. Крыло предотвращает провисание лопастей на стоянке и свист концов при вращении.
Предварительная раскрутка воздушного колеса происходит на земле, возможна как автономная раскрутка от силовой установки гиролета, так и от внешнего источника энергии. Рационально применение стационарного наземного (палубного) пускового устройства. Такой способ старта экономичен и наиболее бесшумен, что позволит использовать гиролет в населенных пунктах. Тише гиролета могут взлететь только некоторые типы аэростатов.
При автономном старте, двигатель силовой установки гиролета мощностью 100 кВт быстрее чем за минуту раскручивает несущий ротор массой 100 кг. Реактивный момент принимают шасси или опорные лыжи. Стартовая раскрутка может производиться до больших линейных скоростей u0=300 м/с, при полетных u1=100 м/с. Тонкие лопасти с правильной круткой имеют равномерную нагрузку и высокий КПД η не менее 0.75. При относительной массе маховика около 10% от взлетного веса М=1000 кг, запасенной энергии хватает для быстрого вертикального подъема на большую высоту, уже без участия двигателя и трансмиссии:

При неоптимальном темпе взлета растут потери на циркуляцию и сопротивление, реальная высота может быть ниже, но достаточна для надежного взлета в условиях высотной городской застройки.
Гиролет может исполнить еще один уникальный трюк. Кроме разгона сотни килограммов маховика, возможен и разгон нескольких тонн воздушного потока. Куб воздуха 10 м*10 м*10 м имеет массу более тонны (m=1249 кг, t=15°C, H=0). Перед стартом, воздушное колесо может создать мощный восходящий поток из перегретого у земли воздуха, а затем использовать его энергию для взлета. Растет высота взлета, скороподъемность и вертикальная перегрузка.
При взлете гиролета мощность, выдаваемая воздушным колесом, уже не ограничена, ни мощностью двигателя, ни надежностью редуктора и трансмиссии. Вся необходимая энергия для взлета закачивается в ротор на земле. Располагаемая взлетная мощность многократно превышает мощность силовой установки. Уникальная для гиролетов способность безмоторного взлета открывает дорогу для широкого применения бесшумных электрических силовых установок и экономичных топливных элементов.
Гиролет - устойчивый и всепогодный летательный аппарат.
Всепогодность обеспечивают не только большая располагаемая мощность и скороподъемность. Раскрученное воздушное колесо, как мощный силовой гироскоп, сохраняет стартовую плоскость вращения. Атмосферная турбулентность и порывы ветра не оказывают на нее заметного воздействия. Гиролет без проблем взлетает в сложных условиях: в шторм и в жару, в условиях высокогорья и с неподготовленных пыльных площадок.
На взлете нет сложных переходных режимов. Еще на земле, двигатель переключается на маршевый винт, вся его мощность используется, исключительно, для набора горизонтальной крейсерской скорости. При пологом взлете с крыши здания можно использовать избыток энергии несущего ротора.
Таким образом, гиролет в любую погоду, устойчиво и без лишнего шума, быстро набирает высоту и скорость для горизонтального полета.
Устойчивый горизонтальный полет
Гиролет обладает уникальной устойчивостью на всех режимах полета. Плоскость вращения воздушного колеса поддерживается с небольшим положительным углом атаки. В горизонтальном полете, воздушное колесо работает как плоское крыло, лопасти разгружены, действуют как управляющие плоскости, общий шаг близок к нулевому, циклический шаг и оперение поддерживают оптимальный угол атаки крыла. Изменяемый циклический шаг обеспечивает управляемость на малых скоростях полета. Повороты по курсу производятся рулем направления и поворотом вектора тяги, с внешним скольжением на развитой боковой поверхности.
Вращение ротора создает натяжение контура, что придает тонкому крылу необходимую жесткость и динамическую аэроупругость. Вращение воздушного колеса поддерживается частично авторотацией и частично двигателем, поэтому аппарат не является чистым автожиром, но он конструктивно близок к автожиру и к комбинированному вертолету с крылом и маршевыми винтами. Инерциальный привод и авторотация не создают реактивного момента, поэтому не нужны: ни рулевой винт, ни длинная хвостовая балка, ни сложная трансмиссия. Небольшой постоянный реактивный момент подкрутки одного воздушного колеса двигателем парируется рулем направления, или смещением вектора тяги, или распределением тяги на разнесенных маршевых винтах.
Время полной приемистости газотурбинного двигателя составляет 8-15 секунд, что ограничивает маневренные возможности вертолета. У гиролета мгновенная приемистость и высокая мощность на роторе, не зависящие от мощности силовой установки. Гиролет имеет наибольший диапазон скоростей, может летать со скоростью и экономичностью самолета, способен резко менять высоту, ускоряться и тормозить.
Гиролет превосходит вертолет в горизонтальной и мгновенной вертикальной скорости, но может проигрывать ему в горизонтальной маневренности. Повороты по курсу производятся не наклоном вектора тяги несущего винта, а поворотом вектора тяги маршевого винта с аэродинамическим внешним скольжением на развитой боковой поверхности. При вращающемся роторе невозможны перевороты и фигуры высшего пилотажа: петли, бочки и крутые виражи. Из шести степеней свободы гиролет имеет только три. Эта особенность радикально упрощает пилотирование данного ЛА.
Управление возможно и производится лишь по курсу, по высоте и по скорости. Простое и комфортное управление снижает требования к подготовке пилотов. Возможна простая автоматизация, что важно как для безопасности пилотируемых ЛА, так и для автономности беспилотных. Так, автоматически циклическим шагом воздушного колеса поддерживается плоскость вращения ротора, а общим - стабильная высота полета. Управление по курсу осуществляется рулем направления. Скорость определяется мощностью двигателя и шагом маршевого винта. Возможно активное торможение маршевым винтом, и экстренное торможение разворотом корпуса.
На всех режимах полета, гиролет имеет силовую продольную и поперечную гиростабилизацию. Нет балансировочных потерь аэродинамического качества. Атмосферная турбуленция не нарушают его устойчивость. Это качество делает гиролет исключительно комфортным и всепогодным. Устойчивость очень актуальна для беспилотных ЛА, особенно для миниатюрных, в условиях эффектов низких чисел Рейнольдса.
Гиролет вне конкуренции, если надежность и всепогодность транспортного средства, а также высокая безопасность и комфорт пассажиров, важнее возможности исполнения переворотов и фигур высшего пилотажа. Высокая устойчивость и стабильность в полете исключает возможность «воздушного хулиганства», а это важный аргумент разрешения полетов гиролетам над населенными пунктами.
Диапазон скоростей полета
Гиролет может иметь наибольший диапазон скоростей, среди ЛА, с той же мощностью силовой установки. Благодаря маховику, гиролет имеет более высокую скороподъемность. На всех режимах и скоростях полета ему обеспечена управляемость и высокая устойчивость.
Поворот вектора тяги маршевого винта против направления вращения несущего ротора превращает однороторный гиролет в вертолет нормальной схемы (фиг.22б). Так он может висеть, контролировать продольное и поперечное смещение автоматом перекоса, не меняя плоскость вращения ротора. Гиролет способен зависать на месте, без встречного ветра, при меньшей, чем у вертолета, мощности силовой установки, с отрицательным балансом энергии. Реверс тяги маршевых винтов позволяет выполнить полет хвостом вперед.
Максимальная горизонтальная скорость винтокрылых ЛА, при достаточной мощности силовой установки, ограничена тремя факторами: прочностью винта, его устойчивостью на высоких скоростях и высоким аэродинамическим сопротивлением ротора. Воздушное колесо снимает эти ограничения по скорости полета. Внешнее крыло замыкает нагрузки и делает винт прочным. Крыло создает основную подъемную силу, разгружает лопасти и задает им нулевую крутку, что исключает дисбаланс, срыв потока и образование волнового кризиса. Крыло рассекает поток, лопасти ротора находятся в аэродинамической тени крыла, движутся в приторможенной области следа. Тонкое воздушное колесо имеет малое профильное сопротивление, поэтому возможно получение высокого аэродинамического качества ротора и достижение высоких скоростей полета с поршневым или электрическим двигателем в качестве силовой установки (фиг.21-23).
Использование газотурбинного двигателя делает возможным полет на около- и сверхзвуковой скорости (фиг.24). Вентилятор небольшого диаметра, с относительно широким крылом, может обеспечить гиролету надежный и устойчивый взлет и посадку. Монолитный ротор тоньше фиксированного крыла самолета, имеет меньшее профильное сопротивление. Вращающийся массивный тонкий диск обладает высокой прочностью, динамической аэроупругостью и не подвержен флаттеру. Допустимо снижение скорости вращения и остановка ротора в скоростном маневренном полете. Гиролет может иметь значительный динамический потолок, но наиболее эффективен в тропосфере. Возможен всепогодный, сверхзвуковой ЛА с надежным и устойчивым вертикальным взлетом и посадкой.
Вертикальная посадка.
Вертикальная посадка гиролета - штатный способ, безопасна, надежна и малошумная. Для безопасной посадки не нужен двигатель. Снижение проходит на авторотации, посадка в вертолетном режиме. Возможна посадка без пробега, на любую неподготовленную площадку, соизмеримую с размерами самого аппарата, на крышу здания или на палубу судна. Уровень шума при посадке минимален, так как двигатель работает на малых оборотах или выключен. При снижении, горизонтальная скорость не растет, маховик воздушного колеса эффективно утилизирует всю потенциальную энергию ЛА. Плоское кольцо парашютирует, гасит прецессию и турбулентность концов лопастей. Переменная крутка тонких лопастей обеспечивает предельно высокий КПД воздушному колесу на режиме авторотации, исключает условия образования вихревого кольца. Чем выше нагрузка на площадь ротора, тем ниже чувствительность к атмосферной турбуленции, и выше скорость снижения на авторотации. Большой запас энергии в роторе позволяет ее гасить и перейти в вертолетный режим непосредственно перед мягкой посадкой. Перегрузка будет ощущаться короткое время, вихревое кольцо не успевает сформироваться.
При снижении, управление осуществляется автоматом перекоса: циклический шаг позволяет точно контролировать продольное и поперечное смещение, существенно не меняя плоскость вращения ротора, общий шаг задает скорость снижения и производит «подрыв ротора» перед мягким касанием. Реверс тяги маршевого винта применяется для гашения остаточной горизонтальной скорости. Запаса энергии маховика хватает, чтобы прервать посадку, зависнуть и перелететь на другое место. Посадка безопасна, надежна и тише, чем у автожира. Раскрученный маховик воздушного колеса стабилизирует крен и тангаж, что упрощает пилотирование при планировании и посадке, возможна полностью автоматическая посадка.
После посадки, гиролет сохраняет устойчивость, при сильном ветре, в отличие от вертолетов, способен прижаться к площадке или к качающейся палубе. Воздушному колесу не нужен тормоз, лопасти не свисают, не заденут людей, не отрубят хвостовую балку.
Дальность полета и экономичность.
Существует универсальная формула расчета дальности полета самолетов, вертолетов и любых ЛА тяжелее воздуха (Миль М.Л. и др. Вертолеты. Расчет и проектирование. М. Машиностр. 1967. Том 1. Стр.27):
где: Gt - вес топлива; G - вес ЛА (средний за время полета); Cy/Cx - аэродинамическое качество ЛА; Се - удельный расход топлива двигателя; η - КПД винта, ξ - коэффициент, учитывающий потери мощности в трансмиссии.
Из приведенной формулы видно, что дальность тем больше, чем больше доля топлива в весе ЛА, чем лучше его аэродинамическое качество, чем выше экономичность двигателя и КПД движителя, а также, чем ниже потери мощности в трансмиссии и вспомогательных устройствах.
Вертолет оптимизирован для длительного висения, в этом он превосходит другие ЛА тяжелее воздуха. Гиролет лучше взлетает и садится, а главное - экономичнее в полете, превосходит вертолет по всем параметрам, определяющим и скорость, и дальность:
- Гиролет конструктивно проще, имеет меньший вес конструкции - более высокое весовое совершенство и большую весовую отдачу.
- За счет маховика имеет больший взлетный вес, даже при меньшей мощности силовой установки и при меньшем диаметре ротора.
- Выше аэродинамическое качество несущего ротора и аппарата в целом. Обтекаемый несущий фюзеляж гиролета в горизонтальном полете создает подъемную силу. Корпус вертолета, его длинная хвостовая балка, рулевой винт - только паразитное сопротивление.
- Воздушное колесо обеспечивает переменную крутку лопастям и превосходит по КПД несущий винт с толстыми лопастями фиксированной крутки.
- Прямой привод на маршевый винт передает энергию без потерь мощности в редукторе и трансмиссии, без реактивного момента, без рулевого винта.
- Маршевый винт на крейсерской скорости, как движитель, имеет максимально высокий КПД, выше, чем большой несущий винт в режиме косого обтекания.
- В качестве силовой установки гиролета возможно использование двигателя, более экономичного, чем газотурбинный двигатель.
- Гиролет имеет минимальный расход топлива на взлете и при посадке, у вертолета и других ЛА на этих режимах расход топлива максимальный.
Дальность полета гиролета значительно больше, чем у вертолета и других ЛА вертикального взлета, не уступает дальности самолета. Самолет имеет наибольшую топливную эффективность при полетах на дальние расстояния в стратосфере. Для полетов в тропосфере, на короткие и средние расстояния, гиролет наиболее эффективен.
Дальность полета - определяющий параметр для полетов над морем и для самолетов аэродромного базирования, имеющих жесткие ограничения по условиям посадки. Для всепогодного ЛА с вертикальным взлетом и вертикальной посадкой, при использовании топлива развитой сети АЗС (автомобильных заправочных станций), большая дальность - всего лишь показатель высокой экономичности, и следовательно - экологичности.
Топливная экономичность определяет низкую стоимость летного часа, для пилотируемого гиролета, большой радиус действия и большую длительность дежурства, для беспилотных ЛА.
Надежность и безопасность
Пока не появится надежный, безопасный и простой в управлении летательный аппарат, авиация останется уделом только профессионалов и горстки экстремалов-любителей.
В конструкцию гиролета концептуально заложена безопасность и надежность. Моноблочное воздушное колесо безопаснее популярных двухлопастных роторов, и надежнее сложных многолопастных винтов с шарнирным креплением лопастей. Воздушное колесо не имеет ограничения по скорости полета. Прочность и ресурс моноблочного несущего ротора предельно высоки. Лопасти защищены кольцом от проводов, веток и прочих внешних помех. Маховик воздушного колеса обеспечивает безопасность при отказе двигателя, редуктора и других систем. Живучесть гиролета отменяет обязательность дублирования силовой установки и резервирования систем, что способствует снижению веса ЛА и повышает экономичность. Доступность материалов, простота и технологичность конструкции - условия низкой стоимости производства. Ниже требования и к мощности силовой установки - нет форсированных взлетных и чрезвычайных режимов. Двигатель всегда работает в номинальном, наиболее экономичном режиме с максимальным ресурсом. Для полетов в тропосфере, где гиролет наиболее эффективен, не требуется герметизация прочной кабины и сложное кислородное оборудование. Снижается стоимость ЛА, стоимость его обслуживания и цена летного часа.
Гиролет отличается безопасностью, не только среди ЛА, но и других видов транспорта, способен стать надежным и безопасным персональным средством передвижения. Пилотирование предельно упрощено, не требует высокой квалификации пилота, ошибки пилотирования не фатальны. Гиролет не имеет опасных режимов, невозможны: ни сваливание в штопор, ни разрушающие биения, ни силовые перевороты. Даже потеря скорости вращения ротора не приводит к складыванию лопастей, гиролет с воздушным колесом - парашютирует и садится.
Располагаемая мощность многократно превышает мощность силовой установки, а высокая скороподъемность дает возможность избежать столкновения с препятствиями, при полете на предельно низких высотах, в условиях ограниченной видимости.
Гиролет может иметь наиболее широкий диапазон безопасных скоростей, из всех ЛА он наименее чувствителен к атмосферной турбулентности. Стабильность вращающегося маховика делает его всепогодным и комфортным.
Гиролет способен объединить ценные качества разных ЛА:
- вертикальный взлет и посадка - вертолета,
- скорость, дальность и экономичность - самолета,
- простоту пилотирования и конструкции - автожира,
- малошумность безмоторного взлета - аэростата,
в сочетании с уникальными: всепогодностью, безопасностью и надежностью.
Эти качества, заложенные в гиролет, позволят строить экономичные автоматические персональные и многоместные ЛА для широкого применения.
Человек - слабое звено безопасности на транспорте. На современном уровне доступности точной навигации возможны надежные, полностью автоматические ЛА. Это значительно проще, дешевле и реалистичнее создания безопасного автоматического автомобиля. Возможна простая децентрализованная система безопасности интенсивного воздушного движения.
Гиролет - экологичное решение транспортных проблем, и удаленных неосвоенных территорий, и мегаполисов. Транспортная емкость воздушного пространства и его пропускная способность на много порядков превышает параметры дорожной сети. Умолчим стоимость уничтожаемой земли, стоимость строительства и содержания дорог, мостов, туннелей, путепроводов и парковок. Ресурсы расширения дорожной сети мегаполисов уже исчерпаны, что приводит к коллапсу их развития, с тяжелыми экологическими и макроэкономическими последствиями.
Земля, прежде всего - среда для комфортного обитания и безопасного передвижения людей, а не транспортных средств. Реально: вполовину разгрузить наземный график, сократить потери времени в пробках, сократить потери населения в транспортных катастрофах, улучшить экологию мегаполисов, получить свободу быстрого и безопасного автоматического передвижения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
| Архитектура "Топос" электрического привода воздушного винта | 2019 |
|
RU2786265C2 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
Группа изобретений относится к области авиации, в частности к конструкциям несущих винтов винтокрылых летательных аппаратов. Ротор с лопастями изменяемого шага и изменяемой крутки содержит замкнутое крыло, соединенное гибкими на кручение лопастями с одной или несколькими коаксиальными втулками, причем соединение лопастей с замкнутым крылом выполнено жестким, упругим или упруговязким. Ротор содержит устройство управления общим/циклическим шагом лопастей, которые задаются, частично или полностью, относительным положением (поворотом, наклоном, смещением) втулок. Гибкие на кручение лопасти имеют изменяемую вогнутость профиля, при этом жесткость лопастей, на кручение и/или поперечный изгиб, переменная вдоль лопасти. Лопасти имеют сложную трехмерную форму: изгибы, расширения, сужения, расщепления, сопряжения, подкосы, отклоняемые предкрылки и/или закрылки. Подвижное крепление лопастей к одной или нескольким втулкам выполнено через торсион, или через осевой, или смещенный осевой шарнир. Крепление лопастей к втулке может быть выполнено жестким, при этом лопасти имеют отклоняемый закрылок. Ротор может применяться в ветроэнергетической установке. Достигается увеличение скорости винтокрылого летательного аппарата. 4 н. и 11 з.п. ф-лы, 25 ил. 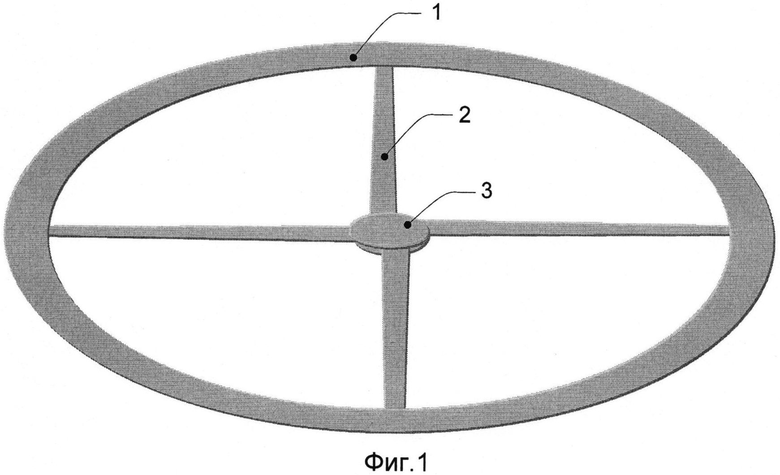
1. Ротор с лопастями изменяемого шага и изменяемой крутки, характеризующийся тем, что он содержит замкнутое крыло, соединенное гибкими на кручение лопастями с одной или несколькими коаксиальными втулками, причем соединение лопастей с замкнутым крылом выполнено жестким, упругим или упруговязким.
2. Ротор по п.1, отличающийся тем, что содержит устройство управления общим/циклическим шагом лопастей.
3. Ротор по п.1, отличающийся тем, что общий и/или циклический шаг лопастей задается, частично или полностью, относительным положением (поворотом, наклоном, смещением) втулок.
4. Ротор по п.1, отличающийся тем, что гибкие на кручение лопасти имеют изменяемую вогнутость профиля.
5. Ротор по п.1, отличающийся тем, что жесткость лопастей, на кручение и/или поперечный изгиб, переменная вдоль лопасти.
6. Ротор по п.1, отличающийся тем, что лопасти имеют сложную трехмерную форму: изгибы, расширения, сужения, расщепления, сопряжения, подкосы, отклоняемые предкрылки и/или закрылки.
7. Ротор по п.1, отличающийся тем, что подвижное крепление лопастей к одной или нескольким втулкам выполнено через торсион, или через осевой, или смещенный осевой шарнир.
8. Ротор по п.1, отличающийся тем, что крепление лопастей к втулке выполнено жестким, а лопасти имеют отклоняемый закрылок.
9. Ротор по п.1, отличающийся тем, что подвижное крепление лопасти или отклоняемого закрылка выполнено упруговязким или содержит демпфер колебаний.
10. Ротор по п.1, отличающийся тем, что лопасти и крыло выполнены гибкими и полыми, с возможностью наполнения полостей газом или жидкостью под избыточным давлением, для увеличения жесткости гибкого ротора.
11. Ротор по п.1, отличающийся тем, что он выполнен складным или разборным, состоит из нескольких шарнирно соединенных или разборных сегментов.
12. Ротор по п.1, отличающийся тем, что его замкнутое крыло выполнено с возможностью реализации функции ротора электрической машины (электрогенератора, электродвигателя, магнитного тормоза).
13. Гиростабилизированный летательный аппарат, характеризующийся тем, что он содержит один или несколько несущих роторов по любому из пп.1-12.
14. Ветроэнергетическая установка, характеризующаяся тем, что она содержит один или несколько роторов по любому из пп.1-12.
15. Пусковое устройство стартовой раскрутки ротора по любому из пп.1-12, характеризующееся тем, что оно выполнено наземным или палубным.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| GB 1429381 A, 24.03.1976 | |||
| US 6086016 A, 11.07.2000 | |||
| ЛОПАСТЬ ВИНТА И АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ЛОПАСТИ (ВАРИАНТЫ) | 1996 |
|
RU2145293C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ЛОПАСТЬ НЕСУЩЕГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093421C1 |
| Устройство для остановки поршня при движении паровоза без пара | 1927 |
|
SU13200A1 |
| Горизонтальный ветро-водяной двигатель | 1929 |
|
SU24788A1 |
| RU 2008119143 A, 20.11.2009 | |||
| ГИБРИДНЫЙ КОМПОЗИТНЫЙ ТОРСИОН ДЛЯ БЕСШАРНИРНОГО НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА (ВАРИАНТЫ) | 1995 |
|
RU2136542C1 |

