Изобретение относится к области радиотехники, в частности к области антенной техники, и может использоваться в средствах радиомониторинга в составе панорамных радиоприемных устройств при контроле радиоэлектронной обстановки, в частности при обнаружении сигналов источников радиоизлучений и оценке их параметров.
Совершенствование радиоэлектронных средств, предназначенных для съема (извлечения) и передачи информации, и их широкое использование в разведывательных целях представляют серьезную угрозу военной и экономической безопасности страны. В этой связи важнейшими задачами радиомониторинга являются контроль загрузки эфира, обнаружение и анализ новых излучений, определение местоположения их источников, оценка их опасности и ценности, выявление непреднамеренных или организованных каналов утечки информации, см. например, Рембовский A.M., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства. / Под ред. A.M.Рембовского. - М.: Горячая линия - Телеком, 2006, стр.10-11. Таким образом, достоверная информация о параметрах сигналов и местоположении источников радиоизлучения является важной компонентой для анализа радиоэлектронной обстановки.
Известны адаптивные антенные системы (устройства) с возможностью управления шириной и положением главного лепестка диаграммы направленности (ДН) антенны для повышения точности оценивания пространственных параметров сигналов источников радиоизлучения (ИРИ).
Адаптивная антенная система, описанная в Р.А.Монзинго, Т.У.Миллер «Адаптивные антенные решетки. Введение в теорию». - М.: Радио и связь, 1986, с.148, содержит n антенных элементов, n линий задержки, n сумматоров, последовательно соединенные генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор и ведомый процессор, первый выход которого является выходом адаптивной антенной системы, причем выход генератора контрольного сигнала подключен к сигнальным входам всех линий задержки, выход каждой из которых подключен к первому входу соответствующего сумматора, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора, корректирующий выход которого подключен к второму входу блока определения разности. Данная адаптивная антенная система (ААС) обеспечивает управление шириной ДН и ориентированием главного лепестка ДН. Однако эта система имеет возможность формирования остронаправленного луча ДН в заданном направлении лишь при наличии априорной информации о местоположении ИРИ.
Наиболее близкой к заявляемой является «Адаптивная антенная система для панорамного радиоприемника» (Россия, патент на изобретение №2291458, МПК 7 H01Q, 21/00 (2006.01), содержащая n антенных элементов, n преселекторов, n линий задержки, n сумматоров, последовательно соединенные генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор и ведомый процессор, первый выход которого является выходом адаптивной антенной системы, блок определения пространственных параметров сигнала в дальней зоне, последовательно соединенные формирователь направляющего сигнала и первый коммутатор, выход которого подключен к соответствующим управляющим входам соответствующих линий задержки, причем второй вход первого коммутатора является входом начальной установки адаптивной антенной системы, а третий вход первого коммутатора является входом переключения режимов работы адаптивной антенной системы, выход генератора контрольного сигнала подключен к сигнальному входу каждой линии задержки, выход каждой из которых подключен к первому входу соответствующего сумматора, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора, корректирующий выход которого подключен к второму входу блока определения разности, выход каждого антенного элемента подключен к первому входу соответствующего преселектора, выход каждого из которых подключен к второму входу соответствующего сумматора и к соответствующему сигнальному входу ведомого процессора, вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов.
Данная ААС обеспечивает возможность формирования остронаправленного луча ДН ААС в направлении обнаруженного ИРИ с произвольным (заранее неизвестным) местоположением и, следовательно, увеличения коэффициента усиления ААС и повышения отношения сигнал/помеха + шум на выходе ААС при оценивании параметров сигналов.
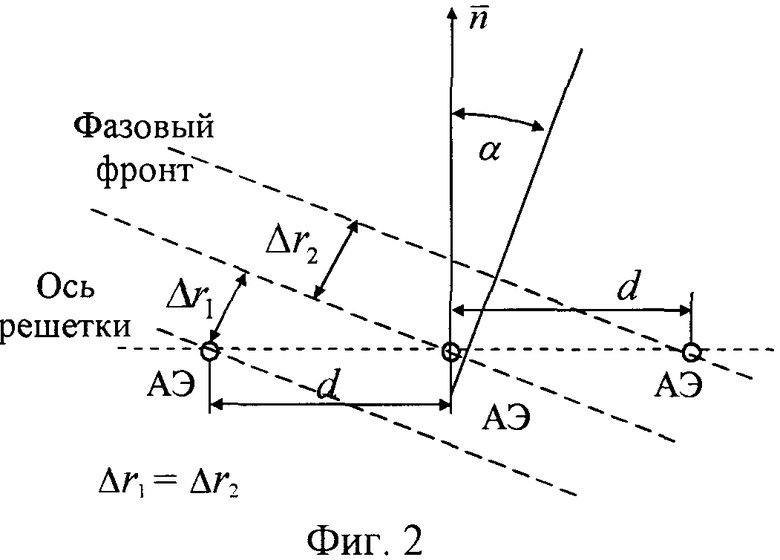
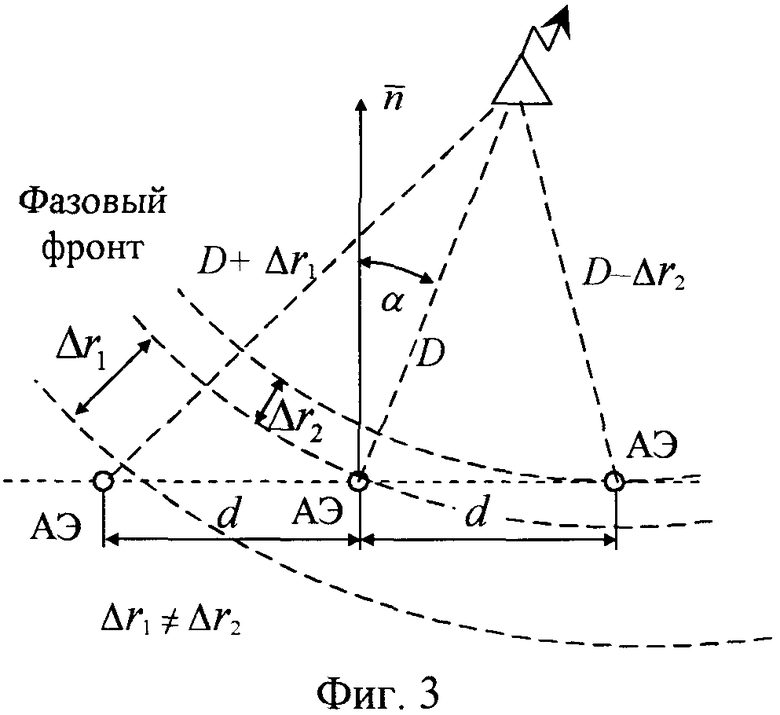
Управление шириной и положением главного лепестка диаграммы направленности в данной ААС осуществляется с использованием информации, заложенной в набеге (сдвиге) фазы выходных напряжений антенных элементов (АЭ) многоэлементной антенной системы, определяемом разностью хода электромагнитной волны до АЭ. Недостатком данной ААС является то, что она эффективно управляет шириной и положением главного лепестка диаграммы направленности только при обнаружении радиоэлектронных средств, находящихся на достаточно большом удалении, то есть когда фронт электромагнитной волны от этих РЭС можно считать плоским, см. фиг.2. Применение данной ААС для обнаружения сигналов в так называемой ближней зоне излучения, в которой сферичностью волны пренебречь нельзя, см. фиг.3, приводит к возникновению неприемлемо больших ошибок определения пространственных параметров обнаруживаемых РЭС вследствие того, что при нахождении РЭС в ближней зоне фазовые сдвиги сигнала на выходах антенных элементов ААС зависят от направления на излучающее РЭС и дальности до него (на фиг.2 и фиг.3 для упрощения рисунка угол места ε принят равным нулю). На фиг.2 и 3 приняты следующие обозначения:
d - расстояние между АЭ;
Δr1, Δr2 - разность хода волны между центральным и 1-м, 2-м АЭ, соответственно;
D - дальность до ИРИ от центрального АЭ;
α - азимут на ИРИ;
 - нормаль к линии расположения АЭ.
- нормаль к линии расположения АЭ.
Границы ближней зоны простираются до расстояния D=2L2/λ, где L - максимальный линейный размер апертуры антенны, λ - длина волны, см. например Справочник по радиолокации. Под ред. М.Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общ. ред. К П.Трофимова, т.2. Радиолокационные антенные устройства. Под ред. П.И.Дудника. - М.: Сов. радио. 1977, с.59. Данная формула, а также фиг.3 показывают, что граница ближней зоны не является фиксированной и зависит от длины волны и расстояния между крайними антенными элементами.
Задача изобретения - расширение области применения и функциональных возможностей адаптивной антенной системы для панорамного радиоприемника за счет обеспечения возможности определения пространственных параметров сигналов обнаруженных РЭС в ближней зоне, причем совокупность этих параметров однозначно характеризует местоположение этих средств.
Для решения поставленной задачи в известную адаптивную антенную систему для панорамного радиоприемника, содержащую n антенных элементов, n преселекторов, n линий задержки, n сумматоров, последовательно соединенные генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор и ведомый процессор, первый выход которого является выходом адаптивной антенной системы, первый блок определения пространственных параметров сигнала, последовательно соединенные формирователь направляющего сигнала и первый коммутатор, выход которого подключен к соответствующим управляющим входам соответствующих линий задержки, причем второй вход первого коммутатора является входом начальной установки адаптивной антенной системы, а третий вход первого коммутатора является входом переключения режимов работы адаптивной антенной системы, выход генератора контрольного сигнала подключен к сигнальному входу каждой линии задержки, выход каждой из которых подключен к первому входу соответствующего сумматора, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора, корректирующий выход которого подключен к второму входу блока определения разности, выход каждого антенного элемента подключен к первому входу соответствующего преселектора, выход каждого из которых подключен к второму входу соответствующего сумматора и к соответствующему сигнальному входу ведомого процессора, вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов, введены последовательно соединенные блок сравнения, вход которого подключен ко второму выходу ведомого процессора, первый блок ИЛИ, второй коммутатор, второй вход которого подключен к второму выходу ведомого процессора, блок определения пространственных параметров сигнала в ближней зоне и второй блок ИЛИ, второй вход которой подключен к выходу блока определения пространственных параметров сигнала в дальней зоне, а выход соединен с входом формирователя направляющего сигнала, второй выход второго коммутатора подключен к первому входу блока определения пространственных параметров сигнала в дальней зоне, при этом вторые входы блоков определения пространственных параметров сигнала в дальней зоне и в ближней зоне являются входами кода частоты.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
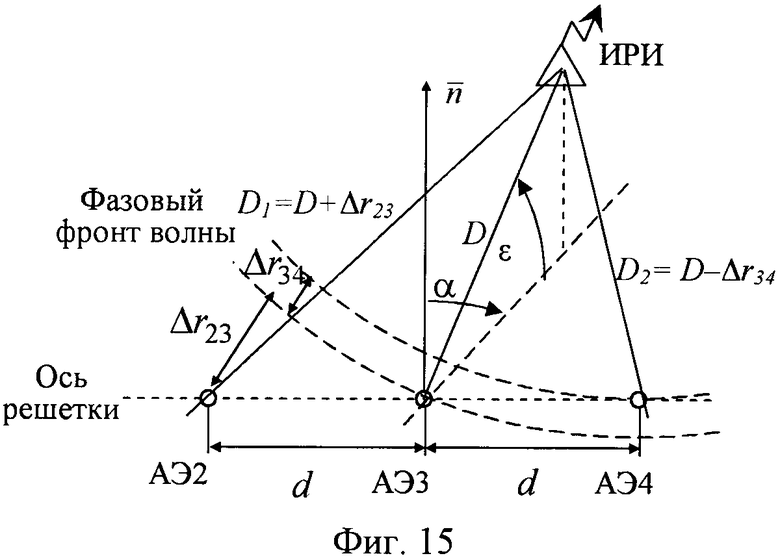
На фиг.1 приведена структурная схема адаптивной антенной системы для панорамного радиоприемника, на фиг.2 - иллюстрация основных соотношений в АЭ, составляющих линейную антенную решетку для плоского фронта волны; на фиг.3 - иллюстрация основных соотношений в АЭ, составляющих линейную антенную решетку для сферического фронта волны, на фиг.4 - схема расположения антенных элементов в заявляемом изобретении, на фиг.5 - диаграммы направленности ААС в азимутальной плоскости, на фиг.6 - структурная схема ведомого процессора, на фиг.7 - структурная схема блока взвешенного сложения ведомого процессора, на фиг.8 - структурная схема линии задержки, на фиг.9 - структурная схема вспомогательного адаптивного процессора, на фиг.10 - структурная схема блока определения пространственных параметров сигналов в дальней зоне, на фиг.11 - структурная схема блока корреляционной матрицы сигнала, фиг.12 - структурная схема коррелятора, входящего в состав блока корреляционной матрицы сигналов, на фиг.13 - структурная схема блока определения пространственных параметров сигналов в ближней зоне, на фиг.14 - структурная схема блока определения пространственных параметров сигналов в ближней зоне в секторе Δα=[0°...120°], на фиг.15 - иллюстрация для определения фазовых сдвигов напряжений сигнала на выходах АЭ в линейной антенной решетке для сферического фронта волны.
Заявляемая адаптивная антенная система для панорамного радиоприемника содержит n антенных элементов 6.1...6.n, n преселекторов 7.1...7.n, n линий задержки 4.1...4.n, n сумматоров 8.1...8.n, последовательно соединенные генератор контрольного сигнала 1, блок определения разности 3, вспомогательный адаптивный процессор 9 и ведомый процессор 14, первый выход которого является выходом адаптивной антенной системы, блок определения пространственных параметров сигнала в дальней зоне 11, последовательно соединенные формирователь направляющего сигнала 5 и первый коммутатор 2, выход которого подключен к соответствующим управляющим входам соответствующих линий задержки 4.1...4.n, причем второй вход первого коммутатора 2 является входом начальной установки адаптивной антенной системы, а третий вход первого коммутатора 2 является входом переключения режимов работы адаптивной антенной системы, выход генератора контрольного сигнала 1 подключен к сигнальному входу каждой линии задержки 4.1...4.n, выход каждой из которых подключен к первому входу соответствующего сумматора 8.1...8.n, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора 9, корректирующий выход которого подключен ко второму входу блока определения разности 3, выход каждого антенного элемента 6.1...6.n подключен к первому входу соответствующего преселектора 7.1...7.n, выход каждого из которых подключен ко второму входу соответствующего сумматора 8.1...8.n и к соответствующему сигнальному входу ведомого процессора 14, вторые входы всех преселекторов 7.1...7.n объединены и являются входом управления перестройкой преселекторов 7.1...7.n, последовательно соединенные блок сравнения 15, вход которого подключен ко второму выходу ведомого процессора 14, первый блок ИЛИ 16, второй коммутатор 13, второй вход которого подключен ко второму выходу ведомого процессора 14, блок определения пространственных параметров сигнала в ближней зоне 12 и второй блок ИЛИ 10, второй вход которой подключен к выходу блока определения пространственных параметров сигнала в дальней зоне 11, а выход соединен с входом формирователя направляющего сигнала 5, второй выход второго коммутатора 13 подключен к первому входу блока определения пространственных параметров сигнала в дальней зоне 11, при этом вторые входы блоков определения пространственных параметров сигнала в дальней зоне и в ближней зоне 11 и 12 являются входами кода частоты.
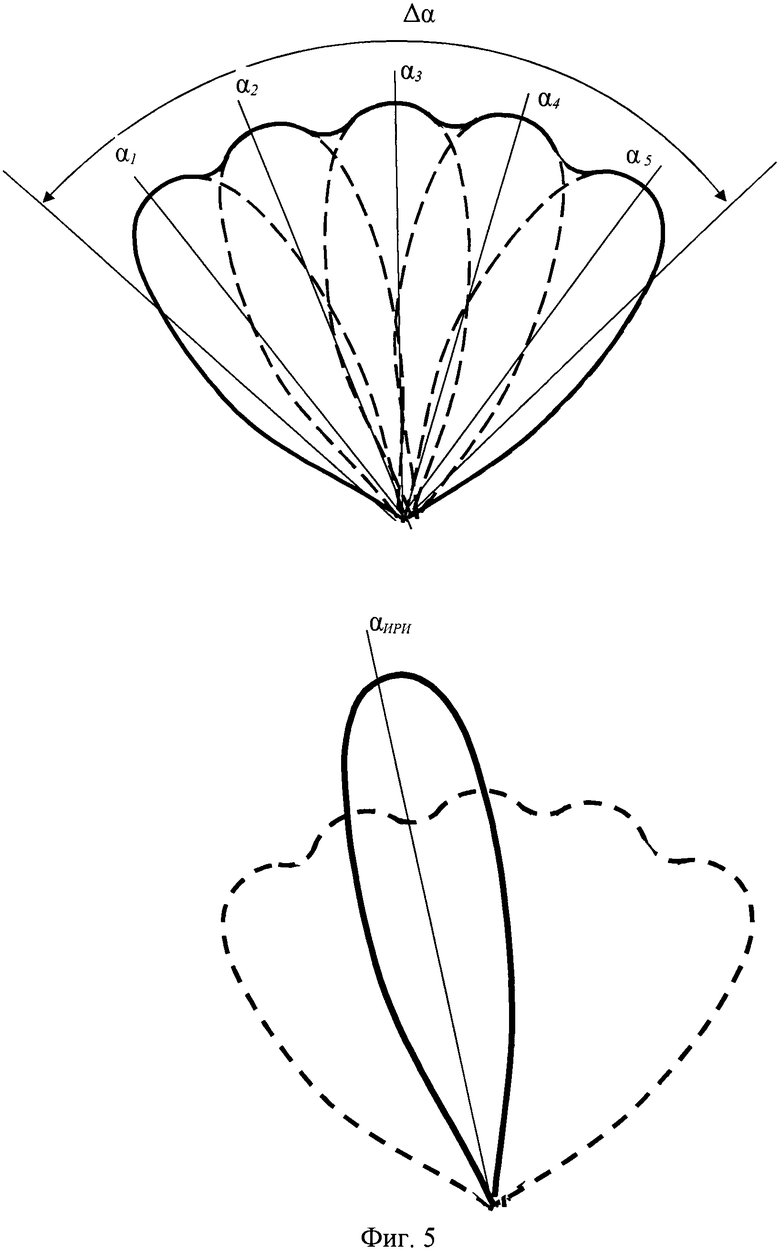
На фиг.5 приняты следующие обозначения:
α1...α5 - направления максимумов остронаправленных лучей ДН ААС в азимутальной плоскости;
Δα - ширина сектора контроля ДН ААС в азимутальной плоскости;
αири - направление максимума остронаправленного луча ДН ААС в азимутальной плоскости в направлении на обнаруженный ИРИ.
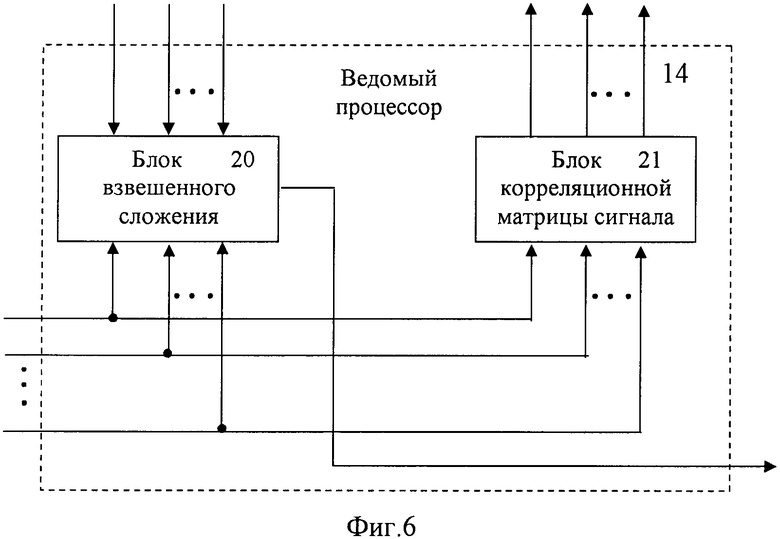
На фиг.6 приняты следующие обозначения:
20 - блок взвешенного сложения;
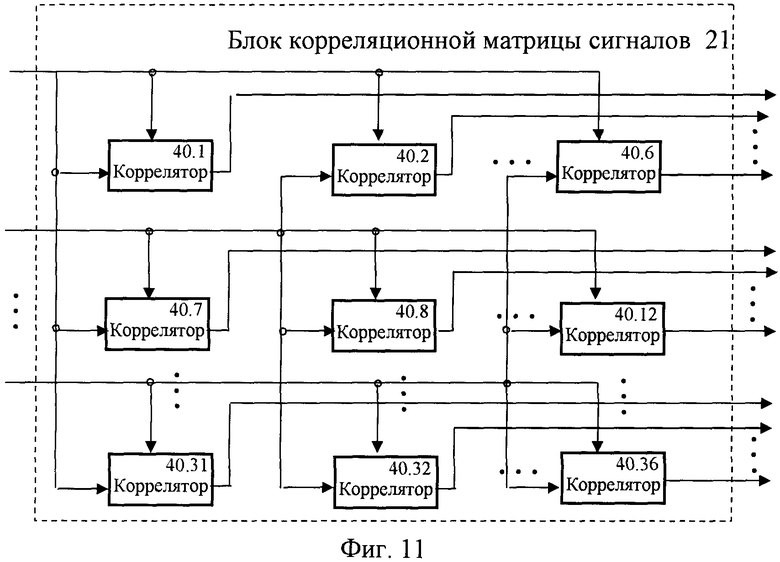
21 - блок корреляционной матрицы сигнала (КМС).
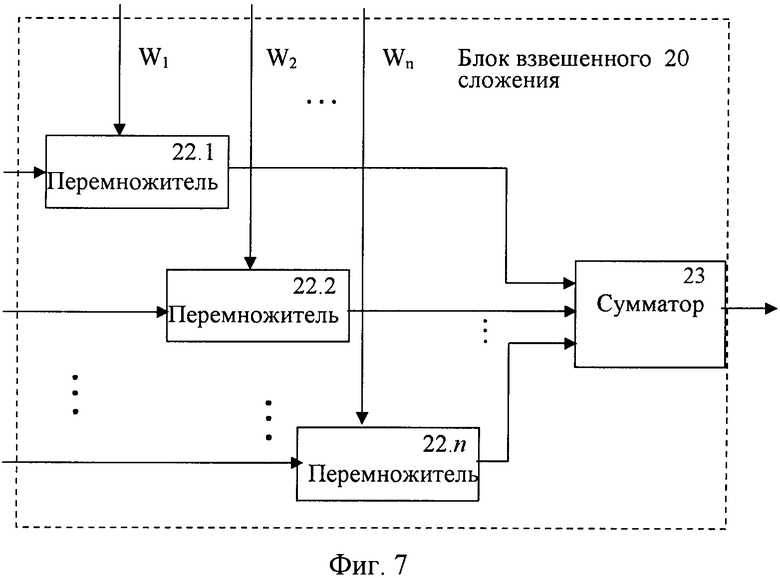
На фиг.7 приняты следующие обозначения:
22.1...22.n - перемножители;
23 - сумматор.
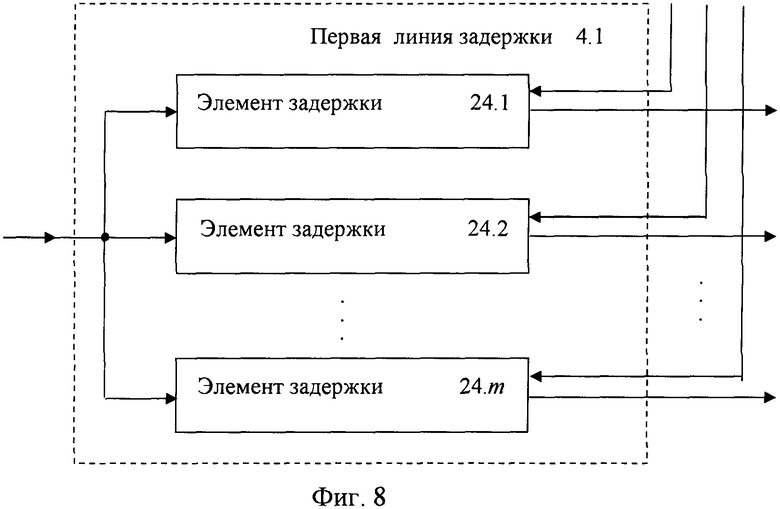
На фиг.8 приняты следующие обозначения:
24.1...24.m - элементы задержки.
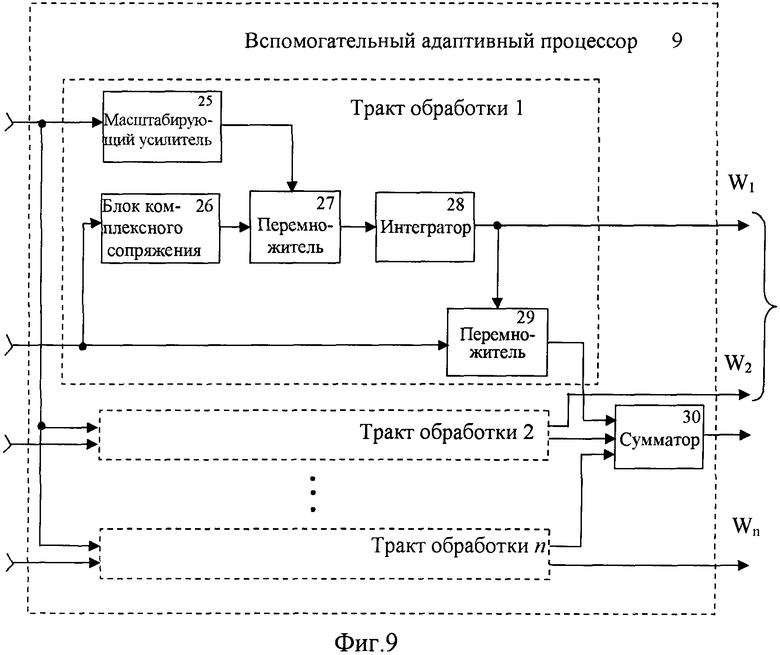
На фиг.9 приняты следующие обозначения:
25 - масштабирующий усилитель;
26 - блок комплексного сопряжения;
27, 29 - перемножители;
28 - интегратор;
30 - сумматор.
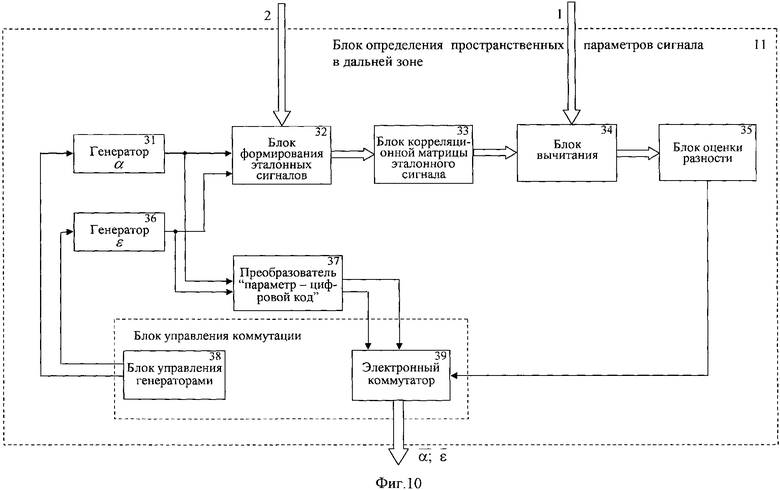
На фиг.10 приняты следующие обозначения:
31; 36 - генераторы значений параметров;
32 - блок формирования эталонных сигналов;
33 - блок корреляционной матрицы эталонного сигнала;
34 - блок вычитания;
35 - блок оценки разности;
37 - преобразователь "параметр - цифровой код";
38 - блок управления генераторами;
39 - электронный коммутатор.
На фиг.11 приняты следующие обозначения:
40.1...40.36 - корреляторы.
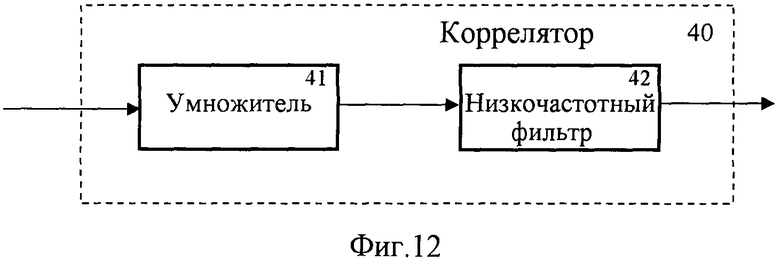
На фиг.12 приняты следующие обозначения:
41 - умножитель;
42 - низкочастотный фильтр.
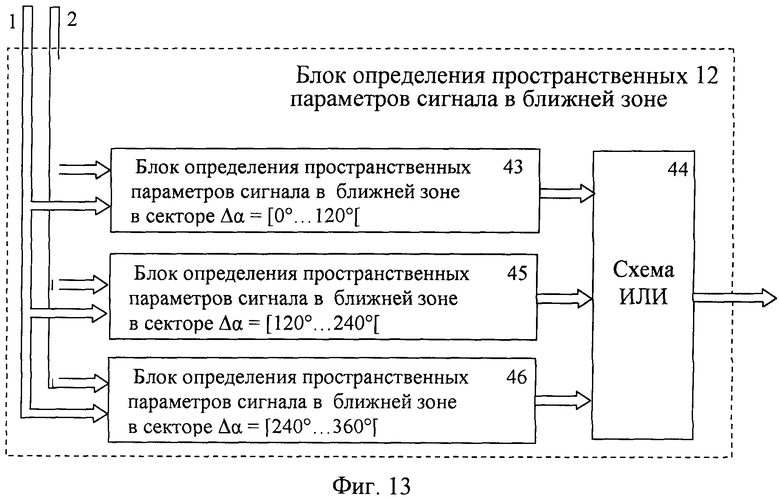
На фиг.13 приняты следующие обозначения:
43, 45, 46 - блоки определения пространственных параметров сигналов в ближней зоне в секторе Δα=[0°...120°], [120°...240°] и [240°...360°], соответственно;
44 - схема ИЛИ.
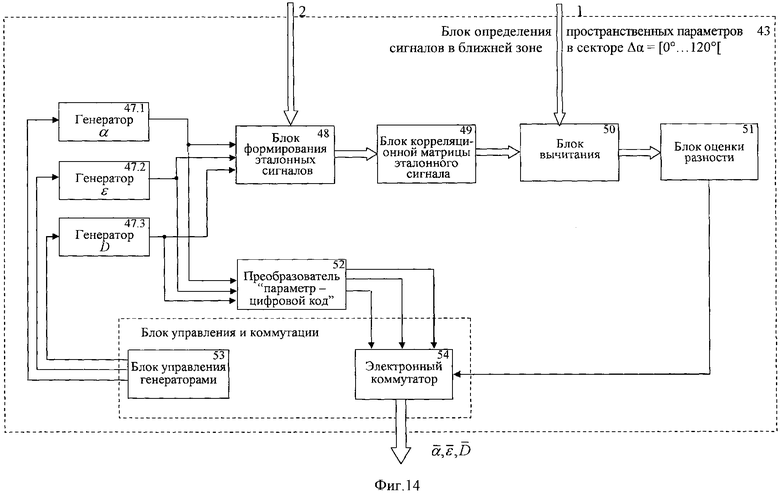
На фиг.14 приняты следующие обозначения:
47.1...47.3 - генераторы значений параметров;
48 - блок формирования эталонных сигналов;
49 - блок корреляционной матрицы эталонного сигнала;
50 - блок вычитания;
51 - блок оценки разности;
52 - преобразователь «параметр - цифровой код»;
53 - блок управления генераторами;
54 - электронный коммутатор.
Блоки, используемые в заявляемой ААС, могут быть реализованы следующим образом.
Генератор контрольного сигнала 1 представляет собой электронный генератор синусоидального напряжения.
Коммутаторы 2 и 13 представляют собой электронные коммутаторы, подключающие один из двух входов на выход коммутатора.
Блок определения разности 3 может быть реализован с использованием дифференциальных усилителей, реализующих операции вычитания сигналов.
Каждая линия задержки 4 представляет собой параллельно соединенные управляемые элементы задержки, которые могут быть реализованы на основе ультразвуковых управляемых линий задержки.
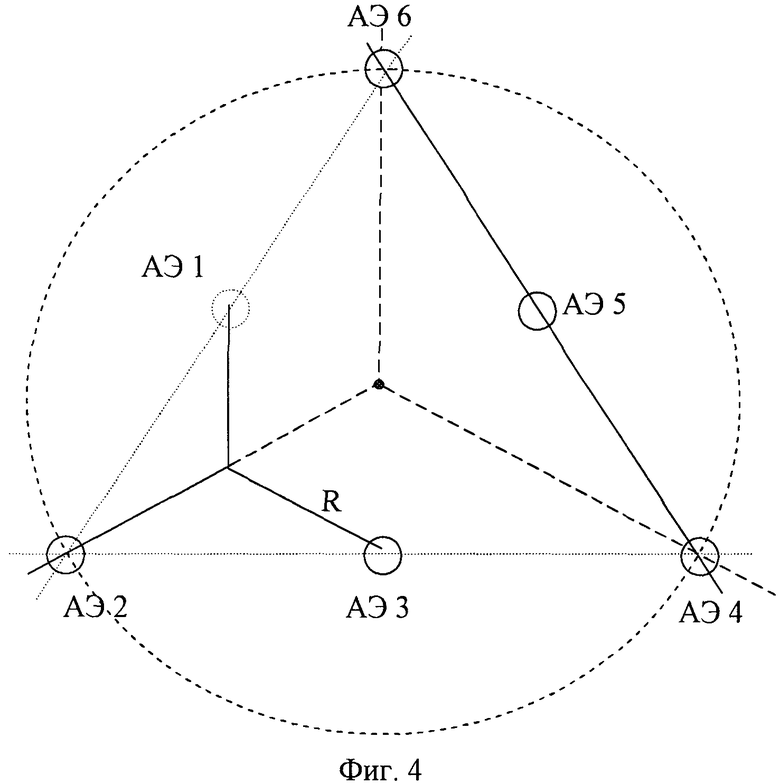
Для реализации функций определения пространственных параметров сигналов в дальней и ближней зонах в заявляемом устройстве используется шесть идентичных АЭ, расположенных в соответствии с фиг.4 (в общем случае возможно использование другого количества АЭ и иных вариантов их размещения). Антенные элементы 2, 4 и 6 образуют равносторонний треугольник, а антенные элементы 1, 3, 5 размещены так, что находятся в серединах сторон этого треугольника.
Используемое количество АЭ и их расположение обусловлено следующими факторами. Антенные элементы 1, 2 и 3 образуют плоскую антенную решетку (АР) и используются при обнаружении и определении пространственных параметров сигналов (азимут, угол места) РЭС, расположенных в дальней зоне (когда фронт электромагнитной волны от этих РЭС можно считать плоским). Группы антенных элементов 2-3-4, 4-5-6 и 6-1-2 образуют линейные АР, которые используются при обнаружении и определении пространственных параметров сигналов (азимут, угол места, дальность до источника радиоизлучения) РЭС, расположенных в ближней зоне.
Преселекторы 7 представляют собой полосовые фильтры с высокой избирательностью.
Сумматоры 8 могут быть реализованы с использованием дифференциальных усилителей, реализующих операции сложения сигналов.
Перемножитель 27, интегратор 28, сумматор 30 вспомогательного адаптивного процессора 9, перемножители 22, сумматор 23 блока взвешенного сложения 20 ведомого процессора 14 могут быть реализованы с использованием дифференциальных усилителей, реализующих соответствующие операции над сигналами. Масштабирующий усилитель 25 вспомогательного адаптивного процессора 9 представляет собой электронный усилитель.
Блок комплексного сопряжения 26 каждого тракта обработки вспомогательного адаптивного процессора 9 формирует на своем выходе напряжение, комплексно сопряженное напряжению на его входе, и может быть реализован с использованием полосно-задерживающих звеньев на основе Т-моста с усилителем напряжения или тока, см. например, «Справочник по теоретическим основам радиоэлектроники. Под ред. Б.Х.Кривицкого в 2-х томах. Т.2. М.: Энергия, 1977.
Блок корреляционной матрицы сигнала 21 ведомого процессора 14 представляет собой (n×n) корреляторов, выходные сигналы которых характеризуют корреляционную связь между сигналами в соответствующих антенных элементах, и может быть реализован по схеме, приведенной на фиг.11 (для упрощения рисунка n принято равным 3). Входящие в состав блока КМС 21 корреляторы 40.1...40.36 широко используются в устройствах обработки сигналов многоканальных АС, например Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и связь, 1983, с.235, рис.10.10, с.240, рис.10.16, Венскаускас К.К. Компенсация помех в судовых радиотехнических системах. - Л.: Судостроение, 1989, с.111, рис.2.31 и могут быть реализованы по схеме фиг.12 в виде последовательно соединенных умножителя 41 и низкочастотного фильтра 42.
Блок определения пространственных параметров сигналов в дальней зоне 11 может быть выполнен по структурной схеме, приведенной на фиг.10. Он содержит последовательно соединенные блок формирования эталонных сигналов 32, блок корреляционной матрицы эталонного сигнала 33, блок вычитания 34, блок оценки разности 35, электронный коммутатор 39, а также блок управления генераторами 38, генераторы значений параметров 31 и 36, входы которых соединены с соответствующими выходами блока управления генераторами 38, преобразователь "параметр - цифровой код" 37, входы которого соединены с соответствующими входами блока формирования эталонных сигналов 32 и выходами соответствующих генераторов значений параметров 31 и 36, а выходы соединены с соответствующими входами электронного коммутатора 39.
Блок определения пространственных параметров сигналов в ближней зоне 12 может быть реализован по схеме, приведенной на фиг.13. Блоки определения пространственных параметров сигналов в ближней зоне в секторе Δα=[0°...120°], [120°...240°] и [240°...360°] 43, 45 и 46, соответственно, входящие в состав блока определения пространственных параметров сигналов в ближней зоне 12, идентичны и отличаются только диапазоном генерации параметра азимута α. Структурная схема одного из этих блоков приведена на фиг.14. Реализация каждого из этих блоков аналогична блоку определения пространственных параметров сигналов в дальней зоне 11, за исключением того, что в их состав дополнительно входят генераторы значений параметра дальности.
Блоки ИЛИ 10, 16 реализуются на логических элементах.
Формирователь направляющего сигнала 5 представляет собой кодопреобразователь, преобразующий l - элементный двоичный код на входе в k - элементный двоичный код на его выходе.
Блок сравнения 15 может быть реализован в виде модулей (по числу линейных АР в составе многоэлементной АС 1) последовательно соединенных вычитающего устройства и блока оценки разности (по аналогии с блоками 34 и 35 в блоке определения частотных и пространственных параметров сигналов в дальней зоне 11).
Таким образом, реализация заявляемого устройства не вызывает сомнений, так для его создания используются типовые радиотехнические устройства и элементы цифровой техники.
Заявляемая ААС предназначена для работы совместно с панорамным радиоприемником (ПРП), осуществляющим последовательно-параллельный обзор заданного частотного диапазона.
Для достижения необходимого качества оценивания параметров обнаруживаемых сигналов ААС в процессе функционирования имеет возможность последовательного автоматического формирования двух ДН: широкой - при контроле РЭО (наблюдении и обнаружении сигналов в заданном секторе) и узкой - при оценивании их параметров.
В процессе работы ААС по командам ПРП осуществляется последовательная пошаговая перестройка одновременно всех преселекторов 7 от нижней до верхней границ заданного частотного диапазона в соответствии с сеткой частот ПРП. При этом на каждом шаге при широкой ДНА ААС сначала осуществляется проверка наличия сигнала в полосе обзора, определяемой полосой пропускания преселектора 7 (в общем случае она может быть регулируемой для согласования с шириной спектра определенного класса сигналов). При появлении сигнала в полосе обзора он принимается антенными элементами 6 и через преселекторы 7 и ведомый процессор 14 поступает на ПРП, где производится его энергетическое обнаружение, после чего по команде с ПРП ААС автоматически формирует узкую ДН в направлении на источник сигнала и далее ПРП производит оценивание параметров сигнала.
Диаграмма направленности ААС формируется следующим образом:
С генератора контрольного сигнала 1 на сигнальные входы всех элементов задержки (ЭЗ) 24 всех линий задержки (ЛЗ) 4 подается синусоидальный сигнал. Каждая ЛЗ 4 представляет собой параллельно соединенные управляемые элементы задержки 24 (на фиг.8 показана одна из них).
В работе ААС можно выделить два режима: контроля и оценивания.
Режим контроля начинается после каждой перестройки преселекторов 7 на очередную частоту (полосу обзора) заданного частотного диапазона, при этом 1-й коммутатор 2 по команде от ПРП устанавливается в такое положение, при котором на управляющие входы всех элементов задержки 24 всех ЛЗ 4 через 1-й коммутатор 2 подаются команды начальной установки, определяющие величину задержки каждого элемента задержки 24 каждой линии задержки 4, обеспечивая управление шириной (Δα, Δε) и положением максимума главного лепестка широкой ДН. Для обеспечения возможности изменения ширины ДН величины задержки каждого элемента задержки 24 при начальной установке задаются таким образом, чтобы на выходах соответствующих элементов задержки 24 всех линий задержки 4 формировались совокупности сигналов, соответствующие плоским волнам, пришедшим с различных направлений. Например, совокупность сигналов с выходов элементов задержки ЭЗ1ЛЗ1, ЭЗ1ЛЗ2,..., ЭЗ1ЛЗn соответствует плоской волне, пришедшей с первого направления (α1, ε1), совокупность сигналов с выходов элементов задержки ЭЗ2ЛЗ1, ЭЗ2ЛЗ2,..., ЭЗ2ЛЗn соответствует плоской волне, пришедшей с второго направления (α2, ε2) и т.д. Количество ЭЗ 24 (m) в каждой ЛЗ 4 (фиг.8) соответствует числу возможных направлений, в которых ААС может сформировать максимумы ДН. Известно, что максимальное количество лучей, которое может сформировать ААС, на единицу меньше числа каналов обработки (см., например, Монзинго Р.А., Миллер Т.У. «Адаптивные антенные решетки. Введение в теорию». - М.: Радио и связь, 1986, с.47). На фиг.5 иллюстрируется получение широкой результирующей ДН в азимутальной плоскости за счет формирования лучей в пяти направлениях применительно к используемому количеству АЭ в заявляемом устройстве. Управляя положениями максимумов каждого луча (α1, ε1; α2, ε2; α3, ε3; α4, ε4; α5, ε5), можно обеспечить требуемую ширину ДН.
Вспомогательный адаптивный процессор 9 (фиг.9) представляет собой многоканальное (по числу антенных элементов) устройство, которое оценивает различия параметров сигналов, воздействующих на его сигнальные входы, и после их преобразования формирует управляющие напряжения, называемые весовыми коэффициентами, таким образом, чтобы разность ΔU0(t) между контрольным сигналом U0(t) и его оценкой U*0(t) на выходе вспомогательного адаптивного процессора 9 была минимальной для минимизации ошибки воспроизведения контрольного сигнала, а следовательно, и всех сигналов, приходящих с направлений, определяемых начальной установкой.
Таким образом, основным назначением вспомогательного адаптивного процессора 9 является выработка управляющих напряжений (весовых коэффициентов), соответствующих совокупности сигналов на его сигнальных входах и обеспечивающих формирование ДН ААС требуемой формы с заданным положением главного лепестка. Эту же функцию выполняют процессоры, широко используемые в ААС различного назначения, см., например, Р.А.Монзинго, Т.У.Миллер «Адаптивные антенные решетки. Введение в теорию». - М.: Радио и связь, 1986, с.97, рис.3.7, с.106, рис.3.9, с.231, рис.5.26, с.304, рис.8.11, Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и связь, 1983, с.236 рис.10.11, Венскаускас К.К. Компенсация помех в судовых радиотехнических системах. - Л.: Судостроение, 1989, с.72, рис.2.15, с.115, рис.2.34, с.125, рис.3.2, Адаптивная компенсация помех в каналах связи. / Ю.И.Лосев, А.Г.Бердников, Э.Ш.Гойхман, Б.Д.Сизов. / Под. ред. Ю.И.Лосева. - М.: Радио и связь, 1988, с.22, рис.1.8, с.35, рис.1.14, с.39, рис.1.17.
Масштабирующий усилитель 25 каждого тракта обработки вспомогательного адаптивного процессора 9 обеспечивает необходимый уровень выходного напряжения блока определения разности 3 на входе перемножителя 27. Параметры масштабирующего усилителя определяют размер интервала адаптации.
Блок комплексного сопряжения 26 каждого тракта обработки вспомогательного адаптивного процессора 9 формирует на своем выходе напряжение, комплексно сопряженное напряжению на его входе.
Сформированные во вспомогательном адаптивном процессоре 9 управляющие напряжения (называемые весовыми коэффициентами) подаются на ведомый процессор 14 (фиг.6) и определяют комплексные коэффициенты передачи в каждом канале блока взвешенного сложения 20 ведомого процессора 14. В результате взвешенного сложения сигналов в ведомом процессоре 14 максимальную результирующую амплитуду будут иметь те сигналы, которые приходят с направлений, определенных начальной установкой. Для сигналов, приходящих с других направлений, напряжения сигналов каждого из каналов в блоке взвешенного сложения 20 будут взаимокомпенсироваться, и их сумма будет минимальной. Таким образом, в режиме контроля ведомый процессор 14 выполняет роль пространственного фильтра, пропускающего на вход ПРП сигналы, приходящие с направлений, определенных начальной установкой, фиг.5.
Режим оценивания начинается с момента энергетического обнаружения сигнала панорамным радиоприемником.
Принятие решения об отнесении источника появившегося сигнала к ближней или дальней зоне в заявляемом устройстве производится путем оценки кривизны фазового фронта волны принимаемого сигнала. Для этой цели из совокупности АЭ используются три линейные АР, состоящие из групп антенных элементов 2-3-4, 4-5-6 и 6-1-2. Использование трех АР обусловлено следующими факторами.
1. При совпадении направления прихода волны с осью линейной АР фазовые сдвиги между сигналами в соответствующих АЭ равны, при этом возможность оценки кривизны фазового фронта отсутствует.
2. Каждая линейная АР чувствительна к изменению кривизны фазового фронта в некотором азимутальном секторе относительно нормали к оси АР, поэтому использование трех АР позволяет выровнять чувствительность многоэлементной АС 1 к изменениям параметров фазового фронта сигналов, приходящих со всех направлений в азимутальной плоскости.
Для оценки кривизны фазового фронта волны принимаемого сигнала и определения пространственных параметров сигнала используется корреляционная матрица сигнала блока корреляционной матрицы сигналов 21 ведомого процессора 14. Известно, что корреляционная матрица сигнала содержит полную информацию о внешних источниках, воздействующих на многоэлементную антенную систему. В случае плоского фронта волны принимаемого сигнала (РЭС в дальней зоне) диагональные элементы КМС дают информацию о мощности собственных и внешних шумов в парциальных каналах приема, остальные элементы КМС содержат информацию о длине волны (частоте) и о направлении прихода сигнала, см., например, Ямпольский В.Г., Фролов О.П. Антенны и ЭМС.- М.: Радио и связь, 1983, стр.227.
В случае сферического фронта волны (РЭС в ближней зоне) совокупность сигналов - элементов КМС, соответствующих функциям взаимной корреляции сигналов в соседних парах АЭ, образующих линейные АР (фиг.4), содержат информацию о длине волны (частоте), направлении прихода сигнала и дальности до РЭС, а диагональные элементы КМС также дают информацию о мощности собственных и внешних шумов в парциальных каналах приема.
На выходе каждого антенного элемента (АЭ) напряжения (отклики) одного и того же входного сигнала отличаются для идентичных АЭ фазовыми сдвигами, определяемыми разностью хода электромагнитной волны до АЭ.
Для извлечения информации, заложенной в набеге (сдвиге) фазы сигнала, необходимо получить корреляционную матрицу сигнала с выходов антенных элементов 6, диагональные элементы которой являются функциями автокорреляции, а остальные элементы - функциями взаимной корреляции сигнала в соответствующих антенных элементах 6.
Для получения элементов КМС производится перемножение и низкочастотная фильтрация выходного напряжения каждого АЭ с выходными напряжениями всех остальных АЭ в блоке КМС 21, схема которого приведена на фиг.11. Корреляторы в блоке КМС 21 идентичны.
Для рассматриваемого в заявляемом устройстве количества АЭ (фиг.4) корреляционная матрица принимаемого сигнала на выходе блока КМС 21 имеет вид
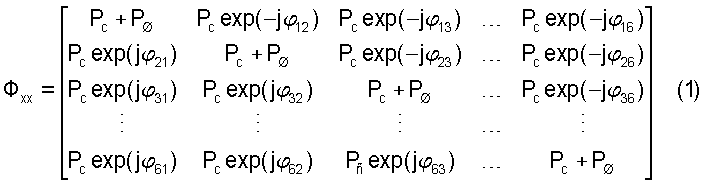
где
ϕ12=ϕ1-ϕ2 - набег фазы принимаемого сигнала в первом АЭ относительно второго;
ϕ13=ϕ1-ϕ3 - набег фазы принимаемого сигнала в первом АЭ относительно третьего;
ϕ21=ϕ2-ϕ1 - набег фазы принимаемого сигнала в третьем АЭ относительно второго и так далее.
Решение о нахождении ИРИ в дальней зоне принимается в случае, когда уровни сигналов элементов корреляционной матрицы, соответствующих функциям взаимной корреляции сигналов в соседних парах антенных элементов линейных АР, равны:
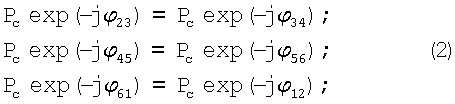
при этом набег фазы наводимых в АЭ напряжений относительно предыдущего из-за разности хода лучей одинаков для любой пары АЭ в линейной АР (см. фиг.4), что соответствует плоской волне.
Решение о нахождении ИРИ в ближней зоне принимается в случае неравенства уровней сигналов элементов корреляционной матрицы, соответствующих функциям взаимной корреляции сигналов в соседних парах антенных элементов хотя бы для одной линейной АР.
Таким образом, при обнаружении сигнала в блоке сравнения 15 производится сравнение уровней сигналов элементов корреляционной матрицы. В случае равенства уровней соответствующих сигналов элементов корреляционной матрицы на выходе блока сравнения 15 сигнал отсутствует, при этом на выходе 1-го блока ИЛИ 16 имеется напряжение низкого уровня (логический ноль), при котором 2-й коммутатор 13 подключает второй выход ведомого процессора 14 к входу блока определения частотных и пространственных параметров сигналов в дальней зоне 11. В случае неравенства уровней соответствующих сигналов элементов корреляционной матрицы хотя бы для одной линейной антенной решетки (фиг.4) на выходе блока сравнения 15 (и соответственно на первом (управляющем) входе 2-го коммутатора 13) появляется напряжение высокого уровня, при этом второй выход ведомого процессора 14 подключается к входу блока определения частотных и пространственных параметров сигналов в ближней зоне 12.
Таким образом, в зависимости от принадлежности обнаруженного РЭС к ближней или дальней зоне определение пространственных параметров сигнала производится в соответствующем блоке определения частотных и пространственных параметров сигналов 11 или 12.
В заявляемом устройстве для определения пространственных параметров сигнала используется корреляционный метод, реализующий алгоритм пространственной обработки сигналов: наведенные в каждом антенном элементе 6 напряжения подвергаются корреляционной обработке, в результате которой формируются сигналы (являющиеся элементами КМС). Фазы этих сигналов содержат информацию об азимуте α, угле места ε и длине волны λ (частоте), а в случае сферического фронта совокупность сигналов (являющихся элементами КМС), соответствующих функциям взаимной корреляции сигналов в соседних парах АЭ, образующих линейные АР, содержат информацию о длинах волн (частотах), направлениях прихода сигналов и дальности до ИРИ.
Как было отмечено выше, при обнаружении и определении пространственных параметров сигнала (азимут, угол места) РЭС, расположенных в дальней зоне, используются антенные элементы 1, 2 и 3, образующие плоскую АР, см. фиг.4, при этом на выходах этих АЭ напряжения (отклики) принимаемого сигнала имеют фазовые сдвиги ϕ1, ϕ2, ϕ3, величины которых определяются соотношением радиуса круга антенного массива R (для этих АЭ), длины волны сигнала λ (частоты f), а также направлением прихода электромагнитных волн, и определяются следующими формулами:
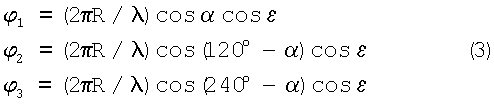
где α - азимут, ε - угол места источника радиоизлучения, характеризующие направление прихода сигнала, см., например, Германия, патент DE 4128191 А1, 1993, МПК7 G01S 3/46.
Определение параметров сигнала α и ε в блоке определения пространственных параметров сигнала в дальней зоне 11 (фиг.10) осуществляется следующим образом. Блок управления генераторами 38 для заданных (установленных пользователем) границ поиска по азимуту αmin, αmax и углу места εmin, εmax и соответствующих значений разрешения по азимуту и углу места Δα, Δε управляет соответствующими генераторами 31 и 36, формирующими множество вариантов сочетаний напряжений, пропорциональных соответственно значениям азимута и угла места (град). В блоке формирования эталонных сигналов 32 имитируются сигналы с антенных элементов 6 ААС для текущих сочетаний значений α; ε. При этом код значения частоты поступает с панорамного радиоприемника и соответствует частоте настройки преселекторов. Блок корреляционной матрицы эталонного сигнала 33 в блоке определения пространственных параметров сигнала 11 идентичен блоку КМС 21 ведомого процессора 14 и выполняет те же функции. В блоке оценки разности 35 определяется точность совпадения корреляционной матрицы принимаемого ААС сигнала и корреляционной матрицы сформированных копий (эталонных сигналов) по заданному пороговому значению. При отсутствии сигнала на входе блока определения пространственных параметров сигнала 11, значение напряжения выходного сигнала блока оценки разности 35 равно нулю. В случае если разность корреляционных матриц сигналов на выходе блока вычитания 34 не превышает порогового значения (т.е. эталонный сигнал максимально совпал с сигналом на выходе блока КМС 21 ведомого процессора 14 и параметры которого надо определить), на выходе блока оценки разности 35 появляется сигнал высокого уровня (логическая единица), который открывает электронный коммутатор 39, при этом сигналы с выходов генераторов значений параметров α, ε 31 и 36, присутствующие на входе электронного коммутатора 39 в виде кода азимута и угла места (в результате аналогово-цифрового преобразования в преобразователе "параметр-цифровой код 37), поступают на выход блока определения пространственных параметров сигнала 11.
Таким же образом (путем формирования множества эталонных сигналов и сравнения каждого из них с принятым многоэлементной антенной системой сигналом корреляционным методом) определяются пространственные параметры сигналов в малобазовом интерферометре, см. Германия, патент DE 4128191 A1, 1993, МПК 7 G01S 3/46.
Как было отмечено выше, при обнаружении и определении пространственных параметров сигналов (азимут, угол места, дальность) РЭС, расположенных в ближней зоне, в рассматриваемом примере используются группы антенных элементов 2-3-4, 4-5-6 и 6-1-2, образующие линейные АР. При этом для первой из этих АР разности хода волны между крайними и средним антенными элементами, см. фиг.15, равны
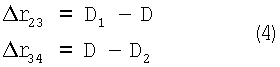
Дальности от АЭ до ИРИ могут быть определены из треугольников АЭ2-ИРИ-АЭЗ и АЭ3-ИРИ-АЭ4 по теореме косинусов
или

С учетом (7) выражение (9) принимает вид:

Решения уравнений (7) относительно разностей хода имеют вид
Тогда выражения для фазовых сдвигов принимают вид:
Аналогичным образом определяются фазовые соотношения для остальных линейных АР многоэлементной АС.
Определение параметров сигнала α, ε и D (дальности до радиоэлектронного средства) при нахождении РЭС в ближней зоне осуществляется в блоке определения пространственных параметров сигналов в ближней зоне 12 (фиг.14). В зависимости от азимута на обнаруженный ИРИ определение параметров сигнала производится в одном из блоков определения пространственных параметров сигналов в ближней зоне в секторе Δα=[0°...120°], [120°...240°] или [240°...360°] 43, 45 или 46, соответственно. Определение пространственных параметров сигналов в ближней зоне в этих блоках производится аналогичным образом, что и в блоке определения пространственных параметров сигналов в дальней зоне 11 с разницей в том, что блок управления генераторами 53 для заданных (установленных пользователем) границ поиска по азимуту αmin, αmax, углу места εmin, εmax и дальности до радиоэлектронного средства D, и соответствующих значений разрешения по азимуту, углу места и дальности Δα; Δε; ΔD управляет соответствующими генераторами 47.1...47.3, формирующими множество вариантов сочетаний напряжений, пропорциональных соответственно значениям азимута и угла места (град), дальности (в метрах). В блоке формирования эталонных сигналов 48 имитируются сигналы с антенных элементов с фазовыми сдвигами для текущих сочетаний значений α, ε, D в соответствии с выражением (9).
Таким образом, в режиме оценивания после определения пространственных параметров сигнала производится в соответствующем блоке определения частотных и пространственных параметров сигналов 11 или 12 (в зависимости от принадлежности обнаруженного РЭС к ближней или дальней зоне) ПРП выдает на 1-й коммутатор 2 команду, по которой он подключает выход формирователя направляющего сигнала 5 к входам всех элементов задержки 24 всех линий задержки 4.
Формирователь направляющего сигнала 5 (представляющий собой кодопреобразователь) ставит в соответствие величинам азимута α и угла места ε величины задержек контрольного сигнала в каждом элементе 24 каждой ЛЗ 4 таким образом, чтобы совокупность сигналов на выходе ЛЗ 4 соответствовала плоской волне, приходящей с направления обнаруженного сигнала. Таким образом, направляющий сигнал представляет собой совокупность управляющих напряжений в виде цифровых кодов для всех элементов 24 всех линий задержки 4. Вспомогательный адаптивный процессор 9 формирует новые весовые коэффициенты, которые подаются на ведомый процессор 14. Коэффициенты передачи в каналах ведомого процессора 14 устанавливаются таким образом, чтобы результат взвешенного сложения был максимальным для сигналов, приходящих с направления обнаруженного ИРИ, а напряжения сигналов с других направлений взаимокомпенсировались при сложении.
Таким образом, в режиме оценивания ведомый процессор 14 также выполняет роль пространственного фильтра, пропускающего на вход ПРП сигналы, приходящие с направления обнаруженного ИРИ в узком луче сформированной ДНА ААС (на фиг.5 с направления αири). Так как обнаружение сигналов в режиме контроля в соответствии с начальной установкой производится в пределах заданного сектора, то и узкий луч ДНА в режиме оценивания формируется в пределах этого сектора, поскольку за его пределами сигналы не обнаруживаются.
Применение заявляемого устройства расширяет область применения адаптивной антенной системы для панорамного радиоприемника за счет обеспечения возможности определения пространственных параметров сигналов обнаруженных РЭС в ближней зоне, а также расширяет функциональные возможности прототипа, так как позволяет определять местоположение обнаруженных РЭС в ближней зоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2005 |
|
RU2291458C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2007 |
|
RU2341024C1 |
| Адаптивная антенная система для панорамного радиоприемника | 2018 |
|
RU2679486C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2005 |
|
RU2292650C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2449472C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАДИОПЕРЕДАТЧИКА ПО ЕГО ИЗЛУЧЕНИЮ В БЛИЖАЙШЕЙ ЗОНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2364885C2 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2449473C1 |
| СПОСОБ СИНТЕЗА МНОГОЛУЧЕВОЙ САМОФОКУСИРУЮЩЕЙСЯ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ СПЕКТРА ПРОСТРАНСТВЕННЫХ ЧАСТОТ СИГНАЛОВ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2017 |
|
RU2659613C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2450422C1 |
Изобретение относится к области радиотехники. Технический результат заключается в расширении области применения и функциональных возможностей адаптивной антенной системы для панорамного радиоприемника за счет обеспечения возможности определения пространственных параметров сигналов обнаруженных РЭС в ближней зоне, причем совокупность этих параметров однозначно характеризует местоположение этих средств. Для этого система содержит n антенных элементов, n преселекторов, n линий задержки, n сумматоров, генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор, ведомый процессор, блок определения пространственных параметров сигнала в дальней зоне, формирователь направляющего сигнала, первый коммутатор. Также введен блок сравнения, вход которого подключен ко второму выходу ведомого процессора, первый блок ИЛИ, второй коммутатор, второй вход которого подключен ко второму выходу ведомого процессора, блок определения пространственных параметров сигнала в ближней зоне и второй блок ИЛИ, второй вход которой подключен к выходу блока определения пространственных параметров сигнала в дальней зоне, а выход соединен с входом формирователя направляющего сигнала, второй выход второго коммутатора подключен к первому входу блока определения пространственных параметров сигнала в дальней зоне, при этом вторые входы блоков определения пространственных параметров сигнала в дальней зоне и в ближней зоне являются входами кода частоты. 15 ил.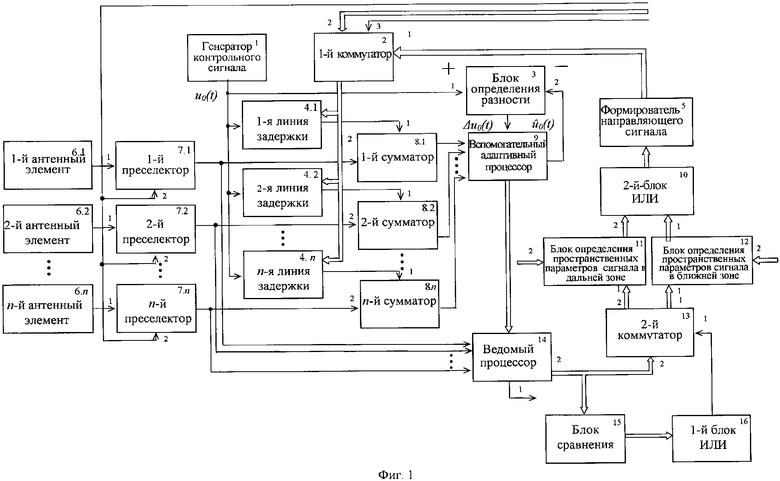
Адаптивная антенная система для панорамного радиоприемника, содержащая n антенных элементов, n преселекторов, n линий задержки, n сумматоров, последовательно соединенные генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор и ведомый процессор, первый выход которого является выходом адаптивной антенной системы, блок определения пространственных параметров сигнала в дальней зоне, последовательно соединенные формирователь направляющего сигнала и первый коммутатор, выход которого подключен к соответствующим управляющим входам соответствующих линий задержки, причем второй вход первого коммутатора является входом начальной установки адаптивной антенной системы, а третий вход первого коммутатора является входом переключения режимов работы адаптивной антенной системы, выход генератора контрольного сигнала подключен к сигнальному входу каждой линии задержки, выход каждой из которых подключен к первому входу соответствующего сумматора, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора, корректирующий выход которого подключен ко второму входу блока определения разности, выход каждого антенного элемента подключен к первому входу соответствующего преселектора, выход каждого из которых подключен ко второму входу соответствующего сумматора и к соответствующему сигнальному входу ведомого процессора, вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов, отличающаяся тем, что в нее введены последовательно соединенные блок сравнения, вход которого подключен ко второму выходу ведомого процессора, первый блок ИЛИ, второй коммутатор, второй вход которого подключен ко второму выходу ведомого процессора, блок определения пространственных параметров сигнала в ближней зоне и второй блок ИЛИ, второй вход которого подключен к выходу блока определения пространственных параметров сигнала в дальней зоне, а выход соединен с входом формирователя направляющего сигнала, второй выход второго коммутатора подключен к первому входу блока определения пространственных параметров сигнала в дальней зоне, при этом вторые входы блоков определения пространственных параметров сигнала в дальней зоне и в ближней зоне являются входами кода частоты.
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2005 |
|
RU2291458C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1995 |
|
RU2099837C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1980 |
|
SU957713A1 |
| WO 9312590, 24.06.1993 | |||
| GB 1475297, 01.06.1977. | |||

