Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы для определения угловой ориентации летательных аппаратов (объектов) в пространстве и на плоскости.
Известен способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов (КА) (варианты) (Пат. РФ №2122217, МПК G01S 5/02, опубл. в бюл. №32, 1998). Способ основан на приеме сигналов от S КА двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с частотой Доплера, определении набега фаз за интервал времени измерения и определении углового положения объекта, в течение интервала времени измерения производят m измерений фазовых сдвигов между парами антенно-приемных устройств, а угловое положение объекта определяют путем решения системы уравнений.
Недостатками способа-аналога и его вариантов является низкая помехоустойчивость к воздействию преднамеренных помех, необходимость обеспечения неподвижности летательного аппарата (объекта) во время проведения измерений и значительные временные затраты. Кроме того, аналоги при измерении путевого угла (азимута) не учитывают угол сноса объекта.
Известен способ угловой ориентации объектов по сигналам КА глобальных навигационных спутниковых систем (Пат. РФ №2105319, МПК G01S 5/00, опубл. 20.02.98, бюл. №5). Способ основан на приеме сигналов от КА глобальных навигационных спутниковых систем (ГНСС) на антенную решетку (АР) из М, М ≥ 4, пространственно разнесенных антенных элементов (АЭ), расположенных в одной плоскости параллельно двум осям симметрии объекта, измерении фазового сдвига между принятыми в АЭ сигналами от каждого КА, однократном изменении углового положения плоскости антенной решетки и повторном измерении фазового сдвига между принятыми в АЭ сигналами, определении углового положения осей измеряемого объекта путем решения основной системы уравнений и дополнительной системы уравнений.
Способ-аналог позволяет по сигналам КА глобальных навигационных спутниковых систем достаточно точно измерять ориентацию объектов (азимут и крен).
Недостатком аналога являются низкая помехоустойчивость к воздействию преднамеренных помех, большие временные затраты на решение основной и дополнительной системы уравнений, последняя из которых является нелинейной. Кроме того, для определения углового положения объекта (АР) необходимо изменить угловое положение АР на произвольный угол, после чего вернуть антенны в исходное состояние (для обеспечения формирования дополнительной системы уравнений). Выполнение этого условия требует наличия на борту объекта устройства поворота АР или маневров самого объекта, что не всегда осуществимо. Другими недостатками аналога являются:
отсутствие возможности измерения угла тангажа;
при измерении путевого угла не учитывается (не измеряется) угол сноса объекта.
Наиболее близким по технической сущности к заявляемому является способ определения угловой ориентации летательных аппаратов (Пат. РФ №2374659, МПК G01S 5/00, опубл. 27.11.2009, бюл. №33). Способ основан на том, что на подготовительном этапе или в процессе полета летательного аппарата (ЛА) сферу над антенной решеткой равномерно разбивают на  элементарных зон привязки, где D и D0 соответственно площади сферы на удалении нескольких тысяч километров от центра АР и элементарной зоны привязки, каждой зоне привязки присваивают порядковый номер bp, р=1.2. …., Р, определяют координаты местоположения центров элементарных зон привязки, АР выполняют из М, М≥4, пространственно разнесенных антенных элементов, расположенных в одной плоскости параллельно двум осям симметрии ЛА, для каждой пары АЭ Аm0, m=1,2, …, М - 1 рассчитывают эталонные значения разностей фаз прихода сигналов относительно координат местоположения центров каждой элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где
элементарных зон привязки, где D и D0 соответственно площади сферы на удалении нескольких тысяч километров от центра АР и элементарной зоны привязки, каждой зоне привязки присваивают порядковый номер bp, р=1.2. …., Р, определяют координаты местоположения центров элементарных зон привязки, АР выполняют из М, М≥4, пространственно разнесенных антенных элементов, расположенных в одной плоскости параллельно двум осям симметрии ЛА, для каждой пары АЭ Аm0, m=1,2, …, М - 1 рассчитывают эталонные значения разностей фаз прихода сигналов относительно координат местоположения центров каждой элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где  - соответственно значения углов тангажа, крена и азимута АР, последовательно дискретно изменяют ориентацию АР на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmax), (βmin,βmах) и (θmin,θmax), (αmax-αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmax - θmin)/Δθ=L без изменения координат центра АР относительно центра элементарных зон привязки, для каждого положения АР
- соответственно значения углов тангажа, крена и азимута АР, последовательно дискретно изменяют ориентацию АР на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmax), (βmin,βmах) и (θmin,θmax), (αmax-αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmax - θmin)/Δθ=L без изменения координат центра АР относительно центра элементарных зон привязки, для каждого положения АР  и для каждого центра элементарных зон привязки рассчитывают и запоминают эталонные значения разностей фаз
и для каждого центра элементарных зон привязки рассчитывают и запоминают эталонные значения разностей фаз  , в процессе работы принимают сигналы от первого обнаруженного космического аппарата глобальной навигационной спутниковой системы, измеряют разности фаз принимаемых сигналов в антенных элементах АР Δϕизм.m0(α,β,θ), вычисляют разность между эталонными разностями фаз, соответствующими углами АР α0, β0, θ0 для bn-й элементарной зоны привязки, и измеренными разностями фаз сигналов первого КА с априорно известным местоположением
, в процессе работы принимают сигналы от первого обнаруженного космического аппарата глобальной навигационной спутниковой системы, измеряют разности фаз принимаемых сигналов в антенных элементах АР Δϕизм.m0(α,β,θ), вычисляют разность между эталонными разностями фаз, соответствующими углами АР α0, β0, θ0 для bn-й элементарной зоны привязки, и измеренными разностями фаз сигналов первого КА с априорно известным местоположением  измеренные разности фаз возводят в квадрат и суммируют по всем М-1 используемым в работе парам АЭ, результаты вычислений Δϕ1(α0, β0, θ0) запоминают, принимают сигналы других КА и определяют значения Δϕs(α0, β0, θ0) для всех S наблюдаемых КА, s=1,2, … S, результаты вычислений суммируют по всем S отмеченным в работе КА и запоминают в элементе r(1,1,1) трехмерной матрицы измерений R(α, β, θ), вычисляют значения
измеренные разности фаз возводят в квадрат и суммируют по всем М-1 используемым в работе парам АЭ, результаты вычислений Δϕ1(α0, β0, θ0) запоминают, принимают сигналы других КА и определяют значения Δϕs(α0, β0, θ0) для всех S наблюдаемых КА, s=1,2, … S, результаты вычислений суммируют по всем S отмеченным в работе КА и запоминают в элементе r(1,1,1) трехмерной матрицы измерений R(α, β, θ), вычисляют значения  для всех возможных углов ориентации АР
для всех возможных углов ориентации АР  i=0,1,2 …, I; j=0,1,2 …, J;
i=0,1,2 …, I; j=0,1,2 …, J;  а полученные результаты записывают в соответствующие элементы
а полученные результаты записывают в соответствующие элементы  трехмерной матрицы измерений R(α,β,θ), за измеренную ориентацию АР и ЛА принимают значения углов
трехмерной матрицы измерений R(α,β,θ), за измеренную ориентацию АР и ЛА принимают значения углов  соответствующие элементу
соответствующие элементу  матрицы измерений R(α, β, θ), имеющему минимальное значение.
матрицы измерений R(α, β, θ), имеющему минимальное значение.
Способ-прототип позволяет сократить временные затраты на измерение углов крена и азимута с учетом угла сноса и обеспечивает дополнительное измерение угла тангажа.
Однако прототипу и аналогам присущ общий недостаток, связанный с низкой их помехозащищенностью. Радиоприемная аппаратура сигналов ГНСС уязвима к воздействию преднамеренных помех различной структуры (см. Пат. РФ №№2525299, 2543078 и др.). Известно, что при повышении мощности помехи над сигналом на 40 дБ без применения специальных мер, происходит срыв синхронизации без последующего обнаружения спутниковых сигналов. В результате возникает необходимость в использовании одного из методов помехозащиты. Предельно достижимая эффективность применения известных методов помехозащиты ограничивается современным уровнем развития элементной базы и составляет 30-40 дБ (см. Никитченко В.В., Смирнов П.Л. Оценка пространственно-поляризационных параметров сигналов и помех приема излучений с псевдослучайной перестройкой рабочей частоты // Радиотехника и электроника, АН СССР, Наука, Т. 35, №4, 1990, С. 767-774). Одним из эффективных методов борьбы с преднамеренными помехами является пространственная фильтрация на основе адаптивных антенных решеток (ААР).
Целью заявляемого способа определения угловой ориентации летательных аппаратов является повышение его помехозащищенности в условиях воздействия преднамеренных помех благодаря использованию оптимизированной пространственной фильтрации при приеме сигналов ГНСС, основанной на минимизации выходной мощности.
В заявляемом способе поставленная цель достигается тем, что в известном способе определения угловой ориентации летательных аппаратов, включающем на подготовительном этапе или в процессе полета летательного аппарата равномерное разбиение сферы над антенной системой (АС) на  элементарных зон привязки, где D и D0 - соответственно площади сферы на удалении нескольких тысяч километров от центра АС и элементарной зоны привязки, присвоении каждой элементарной зоне привязки порядкового номера bp, р=1,2,…, Р, определении координат местоположения центров элементарных зон привязки (X,Y,Z)p, расчете для каждой пары антенных элементов АС Аm0 m=1,2,…, М - 1, М - количество использованных в АС антенных элементов (АЭ), эталонных значений разности фаз прихода сигналов относительно координат местоположения центров каждой р-й элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где - соответственно значения углов тангажа, крена и азимута АС, последовательном дискретном изменении ориентации АС на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmах), (βmin,βmах) и (θmin, θmах), (αmax - αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmах - θmin)/Δθ=L без изменения центра АС относительно центров элементарных зон привязки, расчете для каждого положения АС
элементарных зон привязки, где D и D0 - соответственно площади сферы на удалении нескольких тысяч километров от центра АС и элементарной зоны привязки, присвоении каждой элементарной зоне привязки порядкового номера bp, р=1,2,…, Р, определении координат местоположения центров элементарных зон привязки (X,Y,Z)p, расчете для каждой пары антенных элементов АС Аm0 m=1,2,…, М - 1, М - количество использованных в АС антенных элементов (АЭ), эталонных значений разности фаз прихода сигналов относительно координат местоположения центров каждой р-й элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где - соответственно значения углов тангажа, крена и азимута АС, последовательном дискретном изменении ориентации АС на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmах), (βmin,βmах) и (θmin, θmах), (αmax - αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmах - θmin)/Δθ=L без изменения центра АС относительно центров элементарных зон привязки, расчете для каждого положения АС  и для каждого центра элементарных зон привязки эталонных значений разности фаз
и для каждого центра элементарных зон привязки эталонных значений разности фаз  и запоминании их, приеме в процессе работы сигналов от первого обнаруженного космического аппарата глобальной навигационной спутниковой системы, измерении разности фаз принимаемых сигналов в антенных элементах АС Δϕизм.m0(α, β, θ)р, вычислении разности между эталонными разностями фаз, соответствующими углам АС α0, β0, θ0 для bр-й элементов зоны привязки с измеренными разностями фаз сигнала первого КА с априорно известным местоположением bp (X, Y, Z):
и запоминании их, приеме в процессе работы сигналов от первого обнаруженного космического аппарата глобальной навигационной спутниковой системы, измерении разности фаз принимаемых сигналов в антенных элементах АС Δϕизм.m0(α, β, θ)р, вычислении разности между эталонными разностями фаз, соответствующими углам АС α0, β0, θ0 для bр-й элементов зоны привязки с измеренными разностями фаз сигнала первого КА с априорно известным местоположением bp (X, Y, Z):  возведение в квадрат и суммирование по всем М - 1 используемым в работе парам АЭ измеренных разностей фаз:
возведение в квадрат и суммирование по всем М - 1 используемым в работе парам АЭ измеренных разностей фаз:
запоминании результатов вычислений Δϕ1(α0,β0,θ0), принятии сигналов от других S-1 КА и определении значений Δϕs(α0,β0,θ0) для всех S наблюдаемых s=1,2, …, S, суммировании результатов вычислений:
и запоминании в элементе r(1,1,1) трехмерной матрицы измерений R=(α,β,θ), вычислении значения  для всех возможных углов
для всех возможных углов  ориентации AC, i=0,1,2, …, I, j=0,1,2, …, J,
ориентации AC, i=0,1,2, …, I, j=0,1,2, …, J,  записывании полученных результатов в соответствующие элементы
записывании полученных результатов в соответствующие элементы  трехмерной матрицы измерений R=(α, β, θ), принятии за измеренную ориентацию АС и летательного аппарата значения углов
трехмерной матрицы измерений R=(α, β, θ), принятии за измеренную ориентацию АС и летательного аппарата значения углов  соответствующего элементу
соответствующего элементу  матрицы измерений R=(α, β, θ), имеющему минимальное значение, прием сигналов КА осуществляют на АС, содержащую М идентичных антенных решеток (АР), расположенных в плоскости приема нелинейно и содержащих по N, N≥2 идентичных ненаправленных АЭ, для каждой m-й АР формируют вектор весовых коэффициентов
матрицы измерений R=(α, β, θ), имеющему минимальное значение, прием сигналов КА осуществляют на АС, содержащую М идентичных антенных решеток (АР), расположенных в плоскости приема нелинейно и содержащих по N, N≥2 идентичных ненаправленных АЭ, для каждой m-й АР формируют вектор весовых коэффициентов 
 размерности N, принятые каждым n-м АЭ m-й АР сигналы
размерности N, принятые каждым n-м АЭ m-й АР сигналы  комплексно умножают на соответствующий ему элемент
комплексно умножают на соответствующий ему элемент  вектора весовых коэффициентов суммируют полученные значения в рамках каждой m-й АР, М значений которых используют для измерения разности фаз принимаемых сигналов Δϕизм.m0(α,β,θ)р и последующего уточнения значений
вектора весовых коэффициентов суммируют полученные значения в рамках каждой m-й АР, М значений которых используют для измерения разности фаз принимаемых сигналов Δϕизм.m0(α,β,θ)р и последующего уточнения значений  m=1,2, …, М, а эталонные разности фаз Δϕэт.m0(α0, β0, θ0)р рассчитывают в два этапа, на подготовительном этапе находят и запоминают расчетные разности фаз прихода сигнала из каждой р-й элементарной зоны привязки между опорным АЭ и всеми другими АЭ АС для всех возможных положений АС
m=1,2, …, М, а эталонные разности фаз Δϕэт.m0(α0, β0, θ0)р рассчитывают в два этапа, на подготовительном этапе находят и запоминают расчетные разности фаз прихода сигнала из каждой р-й элементарной зоны привязки между опорным АЭ и всеми другими АЭ АС для всех возможных положений АС  а в процессе работы полученные в рамках каждой АР расчетные разности фаз уточняют путем умножения на соответствующие им элементы
а в процессе работы полученные в рамках каждой АР расчетные разности фаз уточняют путем умножения на соответствующие им элементы  вектора весовых коэффициентов
вектора весовых коэффициентов  и суммируют, а эталонные разности фаз Δϕэт.m0(α0, β0, θ0)р определяют как разность суммарных фаз сигнала между антенными решетками.
и суммируют, а эталонные разности фаз Δϕэт.m0(α0, β0, θ0)р определяют как разность суммарных фаз сигнала между антенными решетками.
Благодаря новой совокупности существенных признаков в заявляемом способе устраняется негативное воздействие преднамеренных помех за счет пространственной фильтрации на основе использования ААР.
Известно устройство угловой ориентации объектов по сигналам КА глобальных навигационных спутниковых систем по Пат. РФ №2185637, МПК G01S 5/00, 5/02, опубл. 20.07.2002, бюл. №20.
Устройство-аналог содержит М, М≥4, идентичных приемных каналов из последовательно соединенных: антенного элемента, малошумящего усилителя, радиотракта и блока цифровой обработки, блок формирования опорных сигналов, первая группа выходов которого соединена со вторыми входами радиотрактов приемных каналов, вторая группа выходов соединена со вторыми входами блоков цифровой обработки приемных каналов, тактовый генератор, первый выход которого соединен со входом формирователя опорных сигналов, а второй выход подключен ко входу синхронизации вычислительного процессора, группы информационных входов которого соединены с соответствующими группами информационных выходов блоков цифровой обработки приемных каналов.
Недостатками устройства-аналога являются низкая помехоустойчивость к воздействию преднамеренных помех, значительные временные затраты на измерение углов крена и азимута, не учитывается угол сноса ЛА и требуется дополнительное измерение угла тангажа.
Наиболее близким по технической сущности к заявляемому устройству определения угловой ориентации летательных аппаратов является устройство по Пат. РФ №2374659, МПК G01S 5/00, опубл. 27.11.2009.
Устройство определения угловой ориентации летательных аппаратов, включает М, М≥4, идентичных приемных каналов из последовательно соединенных антенного элемента, малошумящего усилителя, радиотракта и блока цифровой обработки, предназначенного для преобразования аналогового сигнала в цифровую форму и разложения его на квадратуры, две группы выходов которого являются первой и второй группами информационных выходов соответствующего канала приема, блок формирования опорных сигналов, выход которого соединен со вторыми входами радиотрактов приемных каналов, тактовый генератор, S корреляторов, S блоков анализа, предназначенных для оценки качества принимаемых от космических аппаратов сигналов, S+1 коммутатор, блок начальной установки корреляторов, S блоков вычисления разности фаз, S блоков вычитания, блок памяти, вычислитель-формирователь, предназначенный для формирования трехмерной матрицы измерений R[α,β,θ), блок принятия решения, предназначенный для нахождения элемента трехмерной матрицы измерений с минимальным значением, блок управления, предназначенный для хранения координат центров элементарных зон привязки и сравнения этих координат с координатами обнаруженного космического аппарата, блок индикации, первую, вторую и третью входные установочные шины, радионавигатор и М+1-й антенный элемент, выход которого подключен ко входу радионавигатора, первый информационный выход которого соединен со входом управления блока начальной установки корреляторов, группы информационных входов которого объединены с соответствующими группами информационных входов корреляторов и соответствующими группами информационных выходов приемных каналов, тактовые входы которых объединены и соединены с тактовыми входами блоков цифровой обработки приемных каналов, выходом тактового генератора, входами синхронизации корреляторов, тактовыми входами блока управления, блоков вычисления разности фаз, блока памяти, блоков вычитания, вычислителя-формирователя, блока принятия решения, блока начальной установки корреляторов, S+1-го коммутатора, блоков анализа, вторые группы информационных выходов которых соединены с группами информационных входов соответствующих блоков вычисления разности фаз, первые выходы блоков анализа соединены со входами управления соответствующих коммутаторов, третьи группы выходов блоков анализа соединены с первыми группами информационных входов соответствующих коммутаторов, группы информационных входов блоков анализа соединены с группами информационных выходов соответствующих корреляторов, первые группы входов управления которых соединены с соответствующими первыми группами информационных выходов блока начальной установки корреляторов, вторые группы входов управления корреляторов соединены с группами выходов соответствующих коммутаторов, вторые группы информационных входов которых соединены с соответствующими вторыми группами информационных выходов блока начальной установки корреляторов, группы информационных выходов блоков вычисления разности фаз соединены с соответствующими группами входов S+1-го коммутатора, группа адресных входов которого соединена с группой адресных выходов блока начальной установки корреляторов, а S групп информационных выходов соединены с группами входов вычитаемого соответствующих блоков вычитания, группы входов уменьшаемого которых объединены и соединены с группой информационных выходов блока памяти, группа информационных входов которого является второй входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа адресных входов соединена с группой информационных выходов блока управления, вторая группа информационных входов которого является первой входной установочной шиной устройства определения угловой ориентации летательных аппаратов, первая группа информационных входов блока управления соединена со второй группой информационных выходов радионавигатора, S групп информационных входов вычислителя-формирователя соединены с группами информационных выходов соответствующих блоков вычитания, а группа информационных выходов вычислителя-формирователя соединена с первой группой информационных входов блока принятия решения, вторая группа информационных входов которого соединена с третьей входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа информационных выходов соединена с группой информационных входов блока индикации.
Устройство-прототип обеспечивает сокращение временных затрат на измерение углов крена и азимута с учетом угла сноса и дополнительное измерения угла тангажа. Однако прототипу также присущ недостаток. Устройство теряет свою работоспособность в условиях воздействия на него преднамеренных помех.
Целью заявляемого технического решения является разработка способа и устройства определения угловой ориентации летательных аппаратов, обеспечивающего повышение помехоустойчивости в условиях воздействия преднамеренных помех за счет использования оптимизированного подхода пространственной фильтрации на основе А АС.
В заявляемом устройстве определения угловой ориентации летательных аппаратов поставленная цель достигается тем, что в известном устройстве, состоящем из М, М≥3, идентичных приемных каналов из последовательно соединенных антенного элемента, малошумящего усилителя, радиотракта и блока цифровой обработки, предназначенного для преобразования аналогового сигнала в цифровую форму и разложения его на квадратуры, блок формирования опорных сигналов, выход которого соединен со вторыми входами радиотрактов приемных каналов, тактового генератора, S корреляторов, S блоков анализа, предназначенных для оценки качества принимаемых от космических аппаратов сигналов, S+1 коммутаторов, блока начальной установки корреляторов, S блоков вычисления разности фаз, S блоков вычитания, блока памяти, первого вычислителя-формирователя, предназначенного для формирования трехмерной матрицы измерений R(α, β, θ), блока принятия решения, предназначенного для нахождения элемента трехмерной матрицы измерений с минимальным значением, блока управления, предназначенного для хранения координат центров элементарных зон привязки и сравнения этих координат с координатами обнаруженного космического аппарата, блока индикации, первой и второй входных установочных шин, радионавигатора, первый информационный выход которого соединен со входом управления блока начальной установки корреляторов, группы информационных входов которого объединены с соответствующими группами информационных входов корреляторов, тактовые входы которых объединены и соединены с тактовыми входами блоков цифровой обработки приемных каналов, выходом тактового генератора, входами синхронизации корреляторов, тактовыми входами блока управления, блоков вычисления разности фаз, блока памяти, блоков вычитания, первого вычислителя-формирователя, блока принятия решения, блока начальной установки корреляторов, S+1-го коммутатора, блоков анализа, вторые группы информационных выходов которых соединены с группами информационных входов соответствующих блоков вычисления разности фаз, первые выходы блоков анализа соединены со входами управления соответствующих коммутаторов, третьи группы выходов блоков анализа соединены с первыми группами информационных входов соответствующих коммутаторов, группы информационных входов блоков анализа соединены с группами информационных выходов соответствующих корреляторов, первые группы входов управления которых соединены с соответствующими первыми группами информационных выходов блока начальной установки корреляторов, вторые группы входов управления корреляторов соединены с группами выходов соответствующих коммутаторов, вторые группы информационных входов которых соединены с соответствующими вторыми группами информационных выходов блока начальной установки корреляторов, группы информационных выходов блоков вычисления разности фаз соединены с соответствующими группами входов S+1-го коммутатора, группа адресных входов которого соединена с группой адресных выходов блока начальной установки корреляторов, a S групп информационных выходов соединены с группами входов вычитаемого соответствующих блоков вычитания, группы входов уменьшаемого которых объединены и соединены с группой информационных выходов блока памяти, группа адресных входов которого соединена с группой информационных выходов блока управления, вторая группа информационных входов которого является первой входной установочной шиной устройства определения угловой ориентации летательных аппаратов, первая группа информационных входов блока управления соединена со второй группой информационных выходов радионавигатора, группа информационных выходов первого вычислителя-формирователя соединена с первой группой информационных входов блока принятия решения, вторая группа информационных входов которого соединена с второй входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа информационных выходов соединена с группой информационных входов блока индикации, дополнительно введены (М - 1) × N идентичных приемных каналов, а все М × N приемных каналов разделены на М адаптивные антенные решетки, содержащие по N параллельно подключенных приемных каналов, каждый из которых дополнен умножителем, первая группа комплексных входов которого соединена с выходами соответствующего блока цифровой обработки, а каждая адаптивная антенная решетка дополнена сумматором и блоком формирования весовых коэффициентов, N групп выходов которого соединены со вторыми группами входов соответствующих умножителей, группы выходов которых соединены с соответствующими группами входов сумматора, группа выходов которого является первой группой выходов адаптивной антенной решетки (ААР) и подключена к соответствующей группе информационных входов блока начальной установки корреляторов, вторая группа выходов ААР соединена с выходами блока формирования вектора весовых коэффициентов, второй вычислитель-формирователь, предназначенный для расчета эталонных значений разностей фаз, М групп входов которого соединены с соответствующими вторыми группами выходов адаптивных антенных решеток, M+1-я группа входов соединена с первой входной установочной шиной устройства, M+2-я группа информационных входов является третьей входной установочной шиной устройства, предназначена для ввода координат антенных элементов адаптивных антенных решеток и взаимных расстояний между ними, группа информационных выходов второго вычислителя-формирователя соединена с группой информационных входов блока памяти, антенный вход радионавигатора соединен с первым выходом первой ААР, а входы синхронизации второго вычислителя-формирователя, умножителей и сумматоров соединены с выходом тактового генератора.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи позволяет достичь цели изобретения: обеспечить повышение помехозащищенности устройства от воздействия преднамеренных помех.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг. 1 - обобщенный алгоритм определения угловой ориентации летательных аппаратов;
на фиг. 2 - порядок выполнения операций:
а, б) - формирование элементарных зон привязки и присвоение им порядкового номера;
в) - определение координат центра элементарных зон привязки;
на фиг. 3 - алгоритм расчета вектора весовых коэффициентов;
на фиг. 4 - показаны пары АЭ, задействованные при нахождении расчетных разностей фаз;
на фиг. 5 - алгоритм нахождения:
а) расчетных разностей фаз;
б) эталонных разностей фаз;
на фиг. 6 - варианты формирования массивов:
а) расчетных значений разностей фаз Δϕрас.m0(α, β, θ)р;
б) эталонных значений разностей фаз Δϕэт.m0(α, β, θ)р;
на фиг. 7 - вариант формирования массива измеренных значений разностей фаз Δϕизм.m0(α,β,θ);
на фиг. 8 - очередность вычисления Δϕ(α0, β0, θ0) элемента r(1, 1,1) матрицы измерений R(a, β, θ) для соответствующего значения углов (α0, β0, θ0);
на фиг. 9 - вариант формирования трехмерной матрицы измерений R(α, β, θ);
на фиг. 10 - алгоритм формирования матрицы измерений R(α, β, θ);
на фиг. 11 - приведены результаты полу натурного моделирования:
а) структура ААС, используемая при выполнении анализа;
б) спектр входного и выходного сигнала ААС;
в) результаты оценки курсового угла α предлагаемым способом при воздействии широкополосной помехи;
на фиг. 12 - структурная схема заявляемого устройства определения пространственной ориентации летательных аппаратов;
на фиг. 13 - алгоритм работы блока принятия решения;
на фиг. 14 - алгоритм работы корреляторов;
на фиг. 15 - алгоритм работы блоков вычисления разности фаз;
на фиг. 16 - алгоритм работы блока анализа;
на фиг. 17 - алгоритм работы блока начальной установки корреляторов;
на фиг. 18 - структурная схема девятиканального устройства определения угловой ориентации летательных аппаратов.
Предлагаемый способ базируется на методе эталонной (эквивалентной) разности фаз, используемой в интерферометрах для решения широкого спектра задач (см. Давыденко А.С., Макаров С.Б. Применение метода эталонной разности фаз для пространственной ориентации объекта // Научно-технические ведомости СПбГПУ. Информатика. Телекоммуникации. Управление. - СПб.: СПбГПУ, 2013. №2 (169), С. 39-46). При формировании сигналов ГНСС используют расширение спектра с помощью псевдослучайных последовательностей. В результате огибающая сигналов ГНСС находится ниже уровня шума. Для подавления потребителей сигналов навигационных КА ГНСС используют непрерывные излучения с большей мощностью, чем у полезных сигналов. В этой ситуации для фильтрации таких помех целесообразно использовать алгоритмы, основанные на критерии минимума выходной мощности (МВМ) (см. Grecan A.S., Zoltowski M.D. Advanced adaptive null steering concept for GPS // IEEE Military Communications Conference: Vol.3, 1995, p. 1214-1218). Достоинство данного подхода состоит в том, что ослабление помехи инвариантно к форме огибающей полезного сигнала. Целевая функция  семейства алгоритмов МВМ имеет вид
семейства алгоритмов МВМ имеет вид

где Е[⋅] - символ математического ожидания,  - отсчеты выходного сигнала для N АЭ адаптивной антенной решетки в k-й момент времени,
- отсчеты выходного сигнала для N АЭ адаптивной антенной решетки в k-й момент времени,  - вектор весовых коэффициентов, Н - оператор Эрмитова сопряжения. Однако представленный в ряде изданий аналитический подход к минимизации целевой функции min для решения поставленной задачи не подходит по ряду причин:
- вектор весовых коэффициентов, Н - оператор Эрмитова сопряжения. Однако представленный в ряде изданий аналитический подход к минимизации целевой функции min для решения поставленной задачи не подходит по ряду причин:
требует накопления П отсчетов выходных сигналов  Аналитический алгоритм МВМ предполагает расчет максимального количества отсчетов max П входного сигнала, которые используют для нахождения ВВК. Последние составляют 2046 отсчетов при частоте дискретизации 2,046 МГц. Чем больше П, тем точнее оценка автокорреляционной матрицы для вычисления ВВК. Но при этом ухудшаются динамические свойства адаптивной антенной системы. В результате частота обновления ВВК может быть недостаточной. Задача определения углов ориентации ЛА подразумевает, что вектор-база АС находится в движении, а данный подход не может обеспечить регулярное обновление весовых коэффициентов;
Аналитический алгоритм МВМ предполагает расчет максимального количества отсчетов max П входного сигнала, которые используют для нахождения ВВК. Последние составляют 2046 отсчетов при частоте дискретизации 2,046 МГц. Чем больше П, тем точнее оценка автокорреляционной матрицы для вычисления ВВК. Но при этом ухудшаются динамические свойства адаптивной антенной системы. В результате частота обновления ВВК может быть недостаточной. Задача определения углов ориентации ЛА подразумевает, что вектор-база АС находится в движении, а данный подход не может обеспечить регулярное обновление весовых коэффициентов;
предполагает вычисление алгебраических дополнений для обратной автокорреляционной матрицы, что приводит к увеличению вычислительной сложности.
В рамках предлагаемого способа недостатки аналитического метода минимизации целевой функции (1) устраняются интерактивным способом (метода градиентного спуска). В результате получен рабочий алгоритм МВМ для ААР, функционирующий по сигналам ГНСС. Последний имеет вид
где n=2,3,…, N - номера АЭ, μ - шаг сходимости алгоритма, 0<μ<1.
Предлагаемый способ отличается от существующих способом вычисления эталонных разностей фаз. Последнюю определяют по сигналам двух ААР, а не по сигналам от двух АЭ. Дополнительно для правильного нахождения углов ориентации вектора-базы (летательного аппарата) необходимо учесть амплитудно- фазовое смещение, вносимое каждой ААР. С этой целью в расчетных разностях фаз учитывают значения вектора весовых коэффициентов (ВВК) соответствующих ААР.
Задача определения угловой ориентации объекта по сигналам ГНСС и задача пространственной фильтрации помех с помощью адаптивной антенной системы (ААС) основаны на принципе работы интерферометра. Но при этом требования к реализации антенной системы противоречивы. В случае оценки пространственных параметров сигналов требуется большая длина базы (несколько длин волн λ) для более точного определения углов ориентации ЛА. Более эффективное подавление помех ААС (для избегания появления побочных максимумов в диаграмме направленности ААС) предполагает длину базы не более 0,5λ. Названное противоречие устраняют благодаря реализации ААС в составе четырех ААР, взаимно разнесенных на значительное расстояние ~1 м и расположенных нелинейно. В свою очередь ААР выполняют, например, содержащими три АЭ. В результате использования предложенной структуры ААС обеспечивается одновременное измерение трех пространственных параметров сигналов КС ГНСС (α, β, θ) и подавление двух помеховых сигналов, приходящих с разных направлений.
Реализация заявленного способа поясняется следующим образом. На подготовительном этапе выполняют следующие операции. Сферу над ААС равномерно разбивают на Р=D/D0 элементарных зон привязки (см. фиг. 2 а). Размер элементарных зон привязки соответствуют предварительно заданной точности измерения угловой ориентации ЛА (точности измерения углов тангажа α, крена β и азимута θ адаптивной антенной системы). Сферу над ААС рассчитывают на удалении ~ 20 тыс.км (высоте полета КА ГНСС). Далее находят географические координаты центров элементарных зон привязки (X, Y,Z)p и каждой их них присваивают порядковый номер  (см. фиг. 2 б, в) из набора р=1,2, …, Р.
(см. фиг. 2 б, в) из набора р=1,2, …, Р.
На следующем этапе определяют с заданной точностью координаты АЭ в системе координат антенной системы (см. Пат. РФ №2553270, МПК G01S 5/00, опубл. 10.06.2015, бюл. №16).
После этого находят расчетные разности фаз прихода сигнала для каждой пары антенных элементов всех ААР (см. фиг. 4, 5 а, б) Δmn0, n=1,2, …,N, m=1,2, …, N, относительно координат местоположения центров каждой элементарной зоны привязки 
Порядок нахождения расчетных разностей фаз Δϕрас.nm0(α0,β0,θ0)р следующий. Вводят топологию АС объекта. Последняя включает взаимные расстояния между опорным и остальными АЭ Δdnm0 ААС и ее ориентацию. При проведении моделирования ААС условно размещают в центре исследуемого района на высоте предстоящих измерений, например, 2-3 км. В процессе расчета значений  моделируют размещение эталонного источника поочередно в центрах всех элементарных зон привязки bp, р=1,2, …, Р.
моделируют размещение эталонного источника поочередно в центрах всех элементарных зон привязки bp, р=1,2, …, Р.
Последовательно дискретно изменяют ориентацию ААС на заданные значения углов Δα,Δβ,Δθ в предварительно определенных пределах (αmin,αmax), (βmin,βmax) и (θmin,θmax), (αmах - αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmax - θmin)/Δθ=L без изменения координат центра ААС относительно центров элементарных зон привязки.
Для используемых комбинаций пар АЭ (фиг 4) и всех возможных углов  вычисляют значения разностей фаз
вычисляют значения разностей фаз  для каждой элементарной зоны привязки bр;
для каждой элементарной зоны привязки bр;

где 
расстояние между плоскими фронтами волн в mn-ом и нулевом антенных элементах, пришедшие из bр-той элементарной зоны привязки к ААС под углами γр в азимутальной и μр - в вертикальной плоскостях, хmn, ymn, zmn, х0, у0, z0 - координаты n-го АЭ m-ной ААР и нулевого (опорного) АЭ, с - скорость света, ƒs - частота сигнала s-го КА (см. фиг. 5 а).
Координаты местоположения АЭ для различных значений углов адаптивной антенной системы определяют следующим образом:
где хmn0, уmn0, zmn0 - координаты mn -го АЭ ААС при α=0, β=0 и θ=0, m=1,2, …, М, n=1,2, …, N-1.
Полученные в результате вычислений значения разностей фаз  оформляют в виде массива расчетных данных, вариант представления информации в котором показан на фиг. 6 а.
оформляют в виде массива расчетных данных, вариант представления информации в котором показан на фиг. 6 а.
В процессе работы при обнаружении сигналов от s-го КА ГНСС осуществляют прием его сигналов на ААС, которая содержит М идентичных адаптивных антенных решеток, расположенных в плоскости приема нелинейно и содержащих по N, N≥2 идентичных ненаправленных АЭ.
Для каждой m-ной, m=1,2, …, М, ААР формируют вектор весовых коэффициентов 
 размерности N. Принятые n-ным АЭ m-ной ААР сигналы
размерности N. Принятые n-ным АЭ m-ной ААР сигналы  комплексно умножают на соответствующий им элемент
комплексно умножают на соответствующий им элемент  вектора весовых коэффициентов
вектора весовых коэффициентов  Далее полученные значения суммируют в рамках каждой m-ной ААР, которые используют для измерения разности фаз принимаемых сигналов
Далее полученные значения суммируют в рамках каждой m-ной ААР, которые используют для измерения разности фаз принимаемых сигналов  между ААР адаптивной антенной системы и последующего уточнения значения ВВК
между ААР адаптивной антенной системы и последующего уточнения значения ВВК  Результаты оформляют в виде массива данных, вариант представления которых представлен на фиг. 7.
Результаты оформляют в виде массива данных, вариант представления которых представлен на фиг. 7.
Здесь представлены значения  для всех возможных сочетаний пар ААР М-1и заданного числа КА S. Количество последних S обычно определяется возможностями измерителя и наличием в зоне видимости в данном районе в заданное время минимально необходимого КА и др.
для всех возможных сочетаний пар ААР М-1и заданного числа КА S. Количество последних S обычно определяется возможностями измерителя и наличием в зоне видимости в данном районе в заданное время минимально необходимого КА и др.
В ААР используется взвешенная обработка входных сигналов, а весовые коэффициенты ВВК являются комплексными множителями. В результате к спутниковым сигналам на выходе ААР добавляется фазовый сдвиг, зависящий от значений ВВК и направления прихода полезного сигнала. Поэтому использование ААС предполагает учет фазовых сдвигов при расчете эталонных значений разностей фаз  С этой целью расчетные разности фаз Δϕрас.m0(α, β, θ)р умножают на соответствующие им элементы
С этой целью расчетные разности фаз Δϕрас.m0(α, β, θ)р умножают на соответствующие им элементы  вектора весовых коэффициентов
вектора весовых коэффициентов  и суммируют в рамках соответствующих АР. Эталонные разности фаз Δϕэт.m0(α, β, θ)р определяют как разность суммарных фаз сигналов между АР.
и суммируют в рамках соответствующих АР. Эталонные разности фаз Δϕэт.m0(α, β, θ)р определяют как разность суммарных фаз сигналов между АР.
Кроме того, для нахождения эталонных разностей фаз (одного измерения фазы, s-го КА) на выходе ААС требуется как минимум один период сигнала. Поэтому период получения измеренных и эталонных разностей фаз составляет примерно 1 мс (длительность одного периода псевдослучайной последовательности КА). Следовательно, при использовании ААС в расчетах эталонных разностей фаз необходимо использовать ВВК, усредненный на интервале получения соответствующей измеренной разности фаз. Алгоритм расчета эталонной разности фаз приведен на фиг. 5 б.
Полученные в результате вычислений эталонные значения разности фаз  оформляют в виде массива, вариант представления информации в котором показан на фиг. 6 б.
оформляют в виде массива, вариант представления информации в котором показан на фиг. 6 б.
На следующем этапе реализации заявляемого способа вычисляют разность между эталонными разностями фаз, соответствующими углам ААС α0, β0, θ0 для bр-ной элементарной зоны привязки (для зоны, где обнаружен первый из КА глобальной навигационной спутниковой системы с известными координатами (х, у, z)p и измеренными разностями фаз  :
:

Информация о местоположении КА поступает с его борта на частоте ƒs. На основе последней принимают решение о текущем номере элементарной базы привязки, в которой находится КА.
Аналогичные операции выполняют с сигналами всех S используемых в работе КА.
На следующем этапе значения  возводят квадрат и накапливают
возводят квадрат и накапливают

На фиг. 8 иллюстрируется порядок вычисления сумм Δϕ(α0,β0,θ0) для исходного положения ААС. Операция возведения в квадрат (7) необходима для того, чтобы полученные в выражении (6) разности, имеющие разный знак не компенсировали друг друга в результате выполнения операции сложения. Полученное значение Δϕ(α0, β0, θ0) запоминается в элементе r(1,1,1) трехмерной матрицы измерений R[α, β, θ).
Аналогичные операции (выражения 6, 7) выполняются для всех возможных углов  ориентации ААС: i=0,1,2,…, I, j=0,1,2,…,J,
ориентации ААС: i=0,1,2,…, I, j=0,1,2,…,J,  На основе полученных значений
На основе полученных значений  формируют трехмерную матрицу измерений R(α,β,θ), размерность которой определяется выражением (I+1] × (J+1] × [L+1). Данную операцию реализуют путем записи в элементы
формируют трехмерную матрицу измерений R(α,β,θ), размерность которой определяется выражением (I+1] × (J+1] × [L+1). Данную операцию реализуют путем записи в элементы  матрицы измерений R(α, β, θ) соответствующих значений
матрицы измерений R(α, β, θ) соответствующих значений  (см. фиг. 9, 10). За измеренную ориентацию ААС и объекта принимают значения углов
(см. фиг. 9, 10). За измеренную ориентацию ААС и объекта принимают значения углов  соответствующие элементу матрицы
соответствующие элементу матрицы  измерений R(α,β,θ), имеющему минимальное значение. Обобщенный алгоритм определения угловой ориентации ЛА приведен на фиг. 1.
измерений R(α,β,θ), имеющему минимальное значение. Обобщенный алгоритм определения угловой ориентации ЛА приведен на фиг. 1.
Таким образом, в предлагаемом способе обеспечивается повышение помехоустойчивости к воздействию преднамеренных помех благодаря использованию для приема сигналов адаптивной антенной системы из совокупности в М адаптивных антенных решеток. Предложенная ААС позволила реализовать противоречивые требования, предъявляемые к ее структуре при решении задач помехозащиты и оценивании пространственных параметров летательного аппарата.
Проведено полунатурное моделирование прототипа и предлагаемого способа с использованием ААР на основе записей реальных сигналов ГНСС GPS. Последняя проводилась в условиях прямой видимости спутниковых сигналов и в присутствии широкополосной помехи (1 МГц).
Для определения трех углов пространственной ориентации (α, β, θ) необходимо иметь как минимум две неколлинеарных вектора-базы. Для этого приемные АЭ группируются в три антенные решетки по три АЭ в каждой (см. фиг. 11а). Соседние АЭ каждой решетки разнесены друг от друга на λ/2=90 мм, а сами ААР разнесены на расстояние d=900 мм. Все АЭ расположены в одной плоскости на горизонтальной платформе, вращающейся вокруг своей оси.
На основе выполненных практических испытаний можно сделать следующие выводы:
Использование ААС из трех трехэлементных ААР для пространственной фильтрации помех позволяет избавиться от двух широкополосных помех, приходящих с различных направлений, с отношением мощности помехи к сигналу до 40 дБ. На фиг. 11б приведены периодограммы сигналов до и после ААС.
Известно, что более высокая помехозащита может быть достигнута совместным использованием нескольких методов помехозащиты (см. Никитченко В.В., Смирнов П.Л. Комбинированные методы помехозащиты (использование адаптивных антенных систем и сигналов с псевдослучайной перестройкой частоты) // Зарубежная радиоэлектроника, 1988, №5, С. 24-31).
Предложенному адаптивному тракту приема требуется до 25 мкс для вычисления ВВК. Нахождение ВВК позволяет осуществить взвешенную комплексную обработку принимаемых сигналов, на основе которой становится возможным прием сигналов КА ГНСС для получения пространственных измерений ЛА.
На фиг. 11в изображены результаты оценки курсового угла α предлагаемым способом при воздействии широкополосной помехи мощностью 40 дБ при вращении горизонтальной платформы. Отмечались в работе сигналы 5 КА ГНСС. Как видно из фиг. 11в оценка курсового угла α полностью совпадает с показаниями положения поворотного устройства. В названных условиях способ-прототип неработоспособен.
Заявленное устройство определения угловой ориентации летательных аппаратов содержит М, М≥3, идентичных приемных каналов из последовательно соединенных антенного элемента 1.1.3.1-1.1.3.М, малошумящего усилителя 1.1.4.1-1.1.4.M, радиотракта 1.1.5.1-1.1.5.M и блока цифровой обработки 1.1.6.1-1.1.6.М, предназначенного для преобразования аналогового сигнала в цифровую форму и разложения его на квадратуры, блок формирования опорных сигналов 2, выход которого соединен со вторыми входами радиотрактов приемных каналов, тактовый генератор 3, S корреляторов 4.1-4.S, S блоков анализа 5.1-5.S, предназначенных для оценки качества принимаемых от космических аппаратов сигналов, S+1 коммутаторов 6.1-6.S и 8, блок начальной установки корреляторов 7, S блоков вычисления разности фаз 12.1-12.S, S блоков вычитания 13, блок памяти 14, первый вычислитель-формирователь 17, предназначенный для формирования трехмерной матрицы измерений R(α,β,θ), блок принятия решения 18, предназначенный для нахождения элемента трехмерной матрицы измерений с минимальным значением, блок управления 11, предназначенный для хранения координат центров элементарных зон привязки и сравнения этих координат с координатами обнаруженного космического аппарата, блок индикации 19, первую 15 и вторую 20 входные установочные шины, радионавигатор 9, первый информационный выход которого соединен со входом управления блока начальной установки корреляторов 7, группы информационных входов которого объединены с соответствующими группами информационных входов корреляторов 4.1-4.S, тактовые входы которых объединены и соединены с тактовыми входами блоков цифровой обработки приемных каналов 1.1.5.1-1.1.5.S, выходом тактового генератора 3, входами синхронизации корреляторов 4.1-4.S, тактовыми входами блока управления 11, блоков вычисления разности фаз 12.1-12.S, блока памяти 14, блоков вычитания 13, первого вычислителя-формирователя 17, блока принятия решения 18, блока начальной установки корреляторов 7, S+1-го коммутатора 8, блоков анализа 5.1-5.S, вторые группы информационных выходов которых соединены с группами информационных входов соответствующих блоков вычисления разности фаз 12.1-12.S, первые выходы блоков анализа 5.1-5.S соединены со входами управления соответствующих коммутаторов 4.1-4.S, третьи группы выходов блоков анализа 5.1-5.S соединены с первыми группами информационных входов соответствующих коммутаторов 6.1-6.S, группы информационных входов блоков анализа 5.1-5.S соединены с группами информационных выходов соответствующих корреляторов 4.1-4.S, первые группы входов управления которых соединены с соответствующими первыми группами информационных выходов блока начальной установки корреляторов 7, вторые группы входов управления корреляторов 4.1-4.S соединены с группами выходов соответствующих коммутаторов 6.1-6.S, вторые группы информационных входов которых соединены с соответствующими вторыми группами информационных выходов блока начальной установки корреляторов 7, группы информационных выходов блоков вычисления разности фаз 12.1-12.S соединены с соответствующими группами входов S+1-го коммутатора 8, группа адресных входов которого соединена с группой адресных выходов блока начальной установки корреляторов 7, а S групп информационных выходов соединены с группами входов вычитаемого соответствующих блоков вычитания 13, группы входов уменьшаемого которых объединены и соединены с группой информационных выходов блока памяти 14, группа адресных входов которого соединена с группой информационных выходов блока управления 11, вторая группа информационных входов которого является первой входной установочной шиной 15 устройства определения угловой ориентации летательных аппаратов, первая группа информационных входов блока управления 11 соединена со второй группой информационных выходов радионавигатора 9, группа информационных выходов первого вычислителя-формирователя 17 соединена с первой группой информационных входов блока принятия решения 18, вторая группа информационных входов которого соединена с второй входной установочной шиной 20 устройства определения угловой ориентации летательных аппаратов, а группа информационных выходов соединена с группой информационных входов блока индикации 19, дополнительно введены (М - 1) × N идентичных приемных каналов, а все М × N приемных каналов разделены на М адаптивные антенные решетки 1.1-1.М, содержащие по N параллельно подключенных приемных каналов, каждый из которых дополнен умножителем 1.1.6.1-1.1.6.3, первая группа комплексных входов которого соединена с выходами соответствующего блока цифровой обработки 1.1.5.1-1.1.5.3, а каждая адаптивная антенная решетка 1.1-1.M дополнена сумматором 1.1.7 и блоком формирования весовых коэффициентов 1.1.1, N групп выходов которого соединены со вторыми группами входов соответствующих умножителей 1.1.6.1-1.1.6.3, группы выходов которых соединены с соответствующими группами входов сумматора 1.1.7, группа выходов которого является первой группой выходов адаптивной антенной решетки 1.1-1.М и подключена к соответствующей группе информационных входов блока начальной установки корреляторов 7, вторая группа выходов ААР 1.1-1.М соединена с выходами блока формирования вектора весовых коэффициентов 1.1.1-1.1.М, второй вычислитель-формирователь 16, предназначенный для расчета эталонных значений разностей фаз, М групп входов которого соединены с соответствующими вторыми группами выходов адаптивных антенных решеток 1.1-1.М, M+1-я группа входов соединена с первой входной установочной шиной устройства определения угловой ориентации летательных аппаратов 15, M+2-я группа информационных входов является третьей входной установочной шиной 10 устройства определения угловой ориентации летательных аппаратов, предназначена для ввода координат антенных элементов адаптивных антенных решеток 1.1-1.М и взаимных расстояний между ними, группа информационных выходов второго вычислителя-формирователя 16 соединена с группой информационных входов блока памяти 14, антенный вход радионавигатора 9 соединен с первым выходом первой ААР 1.1, а входы синхронизации второго вычислителя-формирователя 16, умножителей 1.1.6.1-1.1.6.3 и сумматоров 1.1.7 соединены с выходом тактового генератора 3.
На подготовительном этапе по аналогии с прототипом сфера над антенной системой, находящаяся на удалении ~20 тысяч километров, равномерно разбивается на D элементарных зон привязки (см. фиг. 2). Площадь элементарной зоны привязки D0 определяется заданной по шине 20 точностью измерения углов тангажа Δα, крена Δβ и азимута Δθ. Определяют координаты местоположения центров элементарных зон привязки (X, Y, Z)p, которые поступают на входы блоков 11 и 16 по первой входной шине 15. Каждой элементарной зоне присваивают порядковый номер bр, р=1,2, …, Р (см. фиг. 2).
После этого в блоке 16 определяют расчетные значения разностей фаз прихода сигналов для каждой пары адаптивных АЭ Аmn0, m=0,1,2, …, М-1, n=0,1,2, …, N относительно координат местоположения центров каждой элементарной зоны привязки Δϕрас.mn0(α0,β0,θ0)р (см. фиг. 4, 5). Выполнение данной операции предполагает значительные временные затраты. Однако их выполнение возможно на подготовительном этапе. В последующем в процессе работы потребуется лишь уточнение Δϕрас.mn0(α0,β0,θ0)р для того, чтобы их можно было использовать в качестве эталонных значений Δϕэт.mn0(α0,β0,θ0)р. Для этого предварительно осуществляют описание пространственных характеристик ААС. По шине 10 вводят координаты АЭ [X, Y,Z)mn, взаимные расстояния между назначенных нулевым АЭ и другими АЭ ААС dmn0. Последовательно дискретно изменяют ориентацию ААС на заданные по шине 10 значения углов Δα, Δβ, Δθ в предварительно определенных пределах (αmin, αmах), (βmin, βmах) и (θmin, θmах) без изменения координат центра ААС относительно центров элементарных зон привязки. Для каждого положения ААС  и для каждого центра элементарных зон привязки в соответствии с (3) и (4) определяют расчетные значения разностей фаз
и для каждого центра элементарных зон привязки в соответствии с (3) и (4) определяют расчетные значения разностей фаз  . Данные операции реализуются во втором вычислителе-формирователе 16 в соответствии с алгоритмом, представленном на фиг. 5а. Для этого в блок 16 дополнительно по входной шине 15 поступают значения координат центров элементарных зон привязки (X, Y, Z)p. Результаты выполнения названных операций (формулируют в виде массива данных (см. фиг. 6 а). Выполнение этих операций на подготовительном этапе позволяет существенно сократить временные затраты на вычисление эталонных разностей фаз в процессе полета ЛА.
. Данные операции реализуются во втором вычислителе-формирователе 16 в соответствии с алгоритмом, представленном на фиг. 5а. Для этого в блок 16 дополнительно по входной шине 15 поступают значения координат центров элементарных зон привязки (X, Y, Z)p. Результаты выполнения названных операций (формулируют в виде массива данных (см. фиг. 6 а). Выполнение этих операций на подготовительном этапе позволяет существенно сократить временные затраты на вычисление эталонных разностей фаз в процессе полета ЛА.
В процессе работы устройства АЭ 1.1.2.1 - 1.M.2.N принимают высокочастотные сигналы от первого обнаруженного на частоте fs = 1575,42 МГц КА и усиливают в соответствующих малошумящих усилителях 1.1.3.1-1.M.3.N (см. фиг. 12). Далее они поступают на входы соответствующих радиотрактов 1.1.4.1-1.M.1.N М⋅N каналов приема. В блоках 1.1.4.1-1.1.4.N осуществляют преобразование обнаруженных сигналов в электрические сигналы промежуточной частоты, их усиление на 20 dB и избирательность по соседним каналам приема. Полоса пропускания блоков 1.1.4.1-1.M.4.N согласуется с максимально возможным доплеровским сдвигом частоты сигнала КА. Значение промежуточной частоты определяют исходя из характеристик аналого-цифровых преобразователей (АЦП) блоков 1.1.5.1-1.M.S.N и составляют, например 90,42 МГц.
Сигналы промежуточной частоты дискретизируют и квантуют в блоках цифровой обработки сигналов 1.1.5.1-1.M.5.N. Интервал дискретизации выбирают в соответствии с теоремой отсчетов (см. Введение в цифровую фильтрацию. Под ред. Р. Богнера и А. Константидиса. - М.: Мир, 1976, стр. 26-27).
Большинство алгоритмов обработки сигналов рассчитаны на работу с комплексными сигналами. Для перехода от действительных к комплексным сигналам применяют квадратурные преобразования. В результате на выходах каждого из М⋅N блоков цифровой обработки формируют две последовательности отсчетов Imn и Qmn, сдвинутые друг относительно друга на 90 градусов. Синхронизацию работы элементов блоков 1.1.5.1-1.M.5.N осуществляют сигналы тактового генератора 3. Аналогично принимают, оцифровывают и раскладывают на квадратуры сигнала от всех S КА.
Найденные 1.1.5.1-1.М.5.N значения Imn и Qmn поступают на первую группу входов соответствующего умножителя 1.1.6.1-1.M.6.N. На вторую группу его входов поступает соответствующее ему значение элемента  вектора весовых коэффициентов
вектора весовых коэффициентов  . В результате выполнения этой операции обеспечивается взвешенная обработка входного сигнала в рамках каждого mn-го приемного канала, результаты которой поступают на соответствующую группу входов сумматора 1.m.7 m-ой ААР.
. В результате выполнения этой операции обеспечивается взвешенная обработка входного сигнала в рамках каждого mn-го приемного канала, результаты которой поступают на соответствующую группу входов сумматора 1.m.7 m-ой ААР.
Полученные М значений сумм на первых выходах ААР далее используют для измерения разности фаз принимаемых сигналов Δϕизм.mn0(α, β, θ)р и последующего уточнения значений ВВК  В свою очередь значения ВВК
В свою очередь значения ВВК  со второй группы выходов ААР поступают на соответствующую группу входов блока 16 и используются для уточнения расчетных значений разностей фаз Δϕpac.mno (α, β, θ)р.
со второй группы выходов ААР поступают на соответствующую группу входов блока 16 и используются для уточнения расчетных значений разностей фаз Δϕpac.mno (α, β, θ)р.
Космические аппараты глобальных навигационных спутниковых систем используют сигналы фазовой манипуляции, например BPSK, которые могут приниматься лишь когерентно (см. Григорьев В.А. Передача сообщений по зарубежным информационным сетям. - Л.: ВАС, 1989, стр. 98-102). Когерентное детектирование заключается в сравнении фазоманипулированного сигнала с опорным напряжением Uоп(t), которое синхронно и синфазно с несущей и получается обычно путем обработки самого принимаемого сигнала.
Известно, что с помощью устройства GPS U-blox (в заявляемом устройстве блок 9) принимают сигналы КА глобальной навигационной спутниковой системы с интервалом в 1 секунду, которые содержат следующие параметры:
текущее положение объекта (X, Y, Z)s;
время GPS (TOW);
эфемериды (для каждого обнаруженного спутника).
По этим данным для каждого спутника определяют его номер, положение в пространстве и доплеровское смещение частоты Fдопл. Последнее связано с тем, что спутник и объект находятся в движении. Практические испытания показали, что изменение Fдопл составляет примерно 1 Гц за 1 с. Само изменение происходит монотонно, но скорость этого изменения зависит от положения спутника (чем меньше угол места, тем больше скорость «ухода»). Опытным путем было определено, что параметр Fдопл необходимо обновлять не реже, чем 1 раз в 20 мс, а с борта КА значение Fдопл поступает лишь 1 раз в секунду. Данная задача в предлагаемом устройстве (по аналогии с прототипом) решается следующим образом. С помощью блока 9 и первой ААР 1.1 принимаются сигналы КА. Радионавигатор 9 определяет номер обнаруженного спутника s, вычисляет значение доплеровского смещения частоты  на данный спутник и его местоположение в пространстве [X, Y,Z)s. Знание номера спутника s необходимо в связи с тем, что все КА излучают индивидуальные псевдослучайные последовательности. Последние используют далее для корреляционной свертки принимаемых от КА сигналов ƒs.
на данный спутник и его местоположение в пространстве [X, Y,Z)s. Знание номера спутника s необходимо в связи с тем, что все КА излучают индивидуальные псевдослучайные последовательности. Последние используют далее для корреляционной свертки принимаемых от КА сигналов ƒs.
С первого выхода блока 9 (стык RS232) на вход управления блока начальной установки корреляторов 7 последовательно поступает информация о номерах обнаруженных спутников s и соответствующих им доплеровских сдвигах частоты Fдопл. В функции блока 7 входит определение позиции максимума функции корреляции между опорным и оцениваемым сигналами всех обнаруженных КА. В качестве опорного сигнала используют выборку ПСПs длиной в один период (2046 точек), формируемую блоком 7 в соответствии с номером s обнаруженного спутника. В качестве оцениваемого сигнала используется выборка точек длиной в два периода ПСШ (4092 точек), принятая одним из приемных каналов и записанная в блок 7. Одновременно с вычислением корреляционной функции осуществляют поиск позиции ее максимального значения Ks. Следует отметить, что операции записи оцениваемого сигнала в блоке 7 предшествует уточнение частоты сигнала ƒs s-го спутника на значении  В результате на группе информационных выходов блока начальной установки корреляторов 7 присутствуют данные о позиции максимума Ks корреляционной функции, значение
В результате на группе информационных выходов блока начальной установки корреляторов 7 присутствуют данные о позиции максимума Ks корреляционной функции, значение  и номер спутника s. Указанные величины параллельно (каждая по своей шине) поступают на первую группу входов управления первого коррелятора 4.1. Исключение составляет значение Ks, которое поступает на вторую группу управляющих входов блока 4.1 через коммутатор 6.1. Кроме того, номер обнаруженного спутника s поступает на соответствующий адресный вход блока 8. При обнаружении сигналов очередных КА в блоках 9 и 7 выполняются аналогичные операции, а результаты вычислений Ks и значения Fдопл и s поступают на управляющие входы следующих корреляторов 4.2-4.S. Данная настройка корреляторов 4.1-4.S выполняется один раз на этапе инициализации. В дальнейшей работе устройства проводится только подстройка корреляторов 4.1-4.S с помощью блоков 5.1-5.S. Значения Fдопл и s (сформированные блоком 9) в блоке настройки корреляторов 7 дешифрируют и направляют на раздельные управляющие входы корреляторов 4.1-4.S (см. фиг. 9).
и номер спутника s. Указанные величины параллельно (каждая по своей шине) поступают на первую группу входов управления первого коррелятора 4.1. Исключение составляет значение Ks, которое поступает на вторую группу управляющих входов блока 4.1 через коммутатор 6.1. Кроме того, номер обнаруженного спутника s поступает на соответствующий адресный вход блока 8. При обнаружении сигналов очередных КА в блоках 9 и 7 выполняются аналогичные операции, а результаты вычислений Ks и значения Fдопл и s поступают на управляющие входы следующих корреляторов 4.2-4.S. Данная настройка корреляторов 4.1-4.S выполняется один раз на этапе инициализации. В дальнейшей работе устройства проводится только подстройка корреляторов 4.1-4.S с помощью блоков 5.1-5.S. Значения Fдопл и s (сформированные блоком 9) в блоке настройки корреляторов 7 дешифрируют и направляют на раздельные управляющие входы корреляторов 4.1-4.S (см. фиг. 9).
Назначение корреляторов 4.1-4.S состоит в постоянном вычислении корреляционных функций сигналов соответствующих спутников s=1,2,3, …, S. Количество корреляторов как правило соответствует числу наблюдаемых спутников S. Каждый коррелятор содержит М идентичных каналов обработки по числу каналов приема и настраивается на сигналы «своего» КА. В общем случае чем больше количество наблюдаемых КА, а соответственно и корреляторов, тем точнее оцениваются угловые параметры объекта α, β и θ. Однако при этом возрастает сложность реализации устройства и временные затраты на выполняемые операции.
В корреляторах 4.1-4.S предварительно осуществляют комплексное понижение частоты сигнала ƒs на соответствующее значение  Далее по аналогии с блоком 7 реализуют вычисление корреляционной функции, длина которой составляет 2046 символов. На этапе начальной установки выделяют позиции с максимальным значением функций корреляции Ks (определенные блоком 7) для всех S наблюдаемых КА. Дополнительно с каждой позицией Ks в корреляционных функциях выделяют соседние точки (например пять с обеих сторон). Например, если Ks=100, то в блоке 4.S выделяют позиции с 95 по 105. Это необходимо для отслеживания смещения корреляционного максимума блоками 5.1-5.S в процессе работы устройства из-за отсутствия синхронизации приемной и передающей частей. В результате на выходе каждого из корреляторов 4.1-4.S с интервалом 1 мс формируют значения 11⋅М квадратур сигналов, соответствующие максимальным и соседним значениям функции корреляции. Последние поступают на входы соответствующих блоков анализа 5.1-5.S. Здесь осуществляют анализ качества принимаемых от КА сигналов. Для этого на основе поступивших значений квадратур принятых сигналов вычисляют абсолютные значения элементов соответствующих функций корреляции
Далее по аналогии с блоком 7 реализуют вычисление корреляционной функции, длина которой составляет 2046 символов. На этапе начальной установки выделяют позиции с максимальным значением функций корреляции Ks (определенные блоком 7) для всех S наблюдаемых КА. Дополнительно с каждой позицией Ks в корреляционных функциях выделяют соседние точки (например пять с обеих сторон). Например, если Ks=100, то в блоке 4.S выделяют позиции с 95 по 105. Это необходимо для отслеживания смещения корреляционного максимума блоками 5.1-5.S в процессе работы устройства из-за отсутствия синхронизации приемной и передающей частей. В результате на выходе каждого из корреляторов 4.1-4.S с интервалом 1 мс формируют значения 11⋅М квадратур сигналов, соответствующие максимальным и соседним значениям функции корреляции. Последние поступают на входы соответствующих блоков анализа 5.1-5.S. Здесь осуществляют анализ качества принимаемых от КА сигналов. Для этого на основе поступивших значений квадратур принятых сигналов вычисляют абсолютные значения элементов соответствующих функций корреляции

и далее определяют максимальные значения  Если качество сигнала отвечает заданным требованиям
Если качество сигнала отвечает заданным требованиям  включается механизм подстройки соответствующих корреляторов (к работе подключается необходимый блок 5.S). На первых выходах этих блоков 5.15.S формируются управляющие сигналы, которые поступают на управляющие входы коммутаторов 6.1-6.S переводя их во второе устойчивое положение. В результате вторые группы информационных выходов блока 7, несущие сведения о позиции максимума функции корреляции Ks, отключаются от вторых групп входов управления корреляторов 4.1-4.S, а вместо них подключаются к ним соответствующие группы выходов блоков анализа 5.1-5.S. Номера позиций максимума функции корреляции Ks через соответствующие коммутаторы 6.1-6.S поступают на управляющие входы корреляторов 4.1-4.S. Одновременно квадратуры сигналов, соответствующих максимальному значению
включается механизм подстройки соответствующих корреляторов (к работе подключается необходимый блок 5.S). На первых выходах этих блоков 5.15.S формируются управляющие сигналы, которые поступают на управляющие входы коммутаторов 6.1-6.S переводя их во второе устойчивое положение. В результате вторые группы информационных выходов блока 7, несущие сведения о позиции максимума функции корреляции Ks, отключаются от вторых групп входов управления корреляторов 4.1-4.S, а вместо них подключаются к ним соответствующие группы выходов блоков анализа 5.1-5.S. Номера позиций максимума функции корреляции Ks через соответствующие коммутаторы 6.1-6.S поступают на управляющие входы корреляторов 4.1-4.S. Одновременно квадратуры сигналов, соответствующих максимальному значению  со вторых групп выходов блоков анализа 5.1-5.S поступают на группы входов соответствующих блоков вычисления разности фаз 12.1-12.S.
со вторых групп выходов блоков анализа 5.1-5.S поступают на группы входов соответствующих блоков вычисления разности фаз 12.1-12.S.
Если имеет место невыполнение пороговых условий  квадратуры сигналов с выходов соответствующих корреляторов блокируются блоками анализа и не поступают на входы блоков вычисления разности фаз 15.1-15.S.
квадратуры сигналов с выходов соответствующих корреляторов блокируются блоками анализа и не поступают на входы блоков вычисления разности фаз 15.1-15.S.
Блоки 12.1-12.S обеспечивают вычисление разности фаз между сигналами, принятыми в нулевом и других М-1 ААР:

Результаты вычислений с выходов блоков 12.1-12.S поступают на соответствующие группы входов S+1-го коммутатора 11 и далее на соответствующие входы вычитаемого блоков вычитания 13.1-13.S. Здесь очередным тактовым импульсом блока 3 их записывают в соответствующие буферные регистры (см. фиг. 7). Одновременно в блоке управления 11 выполняют операцию сравнения хранящихся в его перепрограммируемой памяти координат центров элементарных зон привязки [X, Y,Z)p и поступивших на его первую группу информационных входов координат КА [X, Y,Z)s (со второй группы информационных выходов радионавигатора 9). В результате на выходах блока управления 11 формируют код числа р (соответствующий номеру элементарной зоны привязки, в которой в данный момент времени находится s-й КА), поступающий на адресные входы блока памяти 14 (см. фиг. 12). С приходом очередного тактового импульса блока 3 значения эталонных разностей фаз  для р-й элементарной зоны привязки поступают на группы входов уменьшаемого блоков вычитания 13.1-13.S. В функции S+1-го коммутатора 8 входит обеспечение прохождения измеренной разности фаз (9) только от блока 12.S. Последние соответствуют сигналам s-го КА, находящегося в данный момент времени в р-й элементарной зоне привязки. Текущая информация о номере спутника s поступает на группу адресных входов блока 8 с адресных выходов блока 7. Аналогичные операции с помощью блоков 9, 7, 11, 8, 12.1-12.S и 13.1-13.S выполняются по всем S обнаруженным спутникам. Результаты вычислений (выражение 6, фиг. 8) поступают на соответствующие группы информационных входов первого вычислителя-формирователя 17.
для р-й элементарной зоны привязки поступают на группы входов уменьшаемого блоков вычитания 13.1-13.S. В функции S+1-го коммутатора 8 входит обеспечение прохождения измеренной разности фаз (9) только от блока 12.S. Последние соответствуют сигналам s-го КА, находящегося в данный момент времени в р-й элементарной зоне привязки. Текущая информация о номере спутника s поступает на группу адресных входов блока 8 с адресных выходов блока 7. Аналогичные операции с помощью блоков 9, 7, 11, 8, 12.1-12.S и 13.1-13.S выполняются по всем S обнаруженным спутникам. Результаты вычислений (выражение 6, фиг. 8) поступают на соответствующие группы информационных входов первого вычислителя-формирователя 17.
Основной задачей первого вычислителя-формирователя 17 является формирование трехмерной матрицы измерений R(α, β, θ). С этой целью полученные в блоках 13.1-13.S разности разностей фаз возводят в квадрат и суммируются (выражение 7). Аналогичные операции выполняют над сигналами всех используемых в работе КА. Полученные результаты (см. фиг. 8 и 9) запоминают в качестве элемента трехмерной матрицы измерений R(α,β,θ). В функции блока принятия решения 18 входит нахождение элемента  трехмерной матрицы измерений R(α, β, θ) с минимальными значениями, которому однозначно соответствуют оцениваемые угловые параметры объекта
трехмерной матрицы измерений R(α, β, θ) с минимальными значениями, которому однозначно соответствуют оцениваемые угловые параметры объекта  Результаты измерений в заданной форме отображаются в блоке 19.
Результаты измерений в заданной форме отображаются в блоке 19.
В устройстве, реализующем предложенный способ, используются известные элементы и блоки, описанные в научно-технической литературе. Блоки с 1.1.2.1 по 1.1.5.1, с 2 по 14, с 17 по 19 реализуются аналогично соответствующим блокам прототипа.
Варианты реализации антенных элементов 1.1.2.1-1.M.2.N, широко рассмотрены в литературе (см. Саидов А.С. и др. Проектирование фазовых автоматических радиопеленгаторов. - М: Радио и связь, 1997). Могут быть реализованы на антеннах С576 (см. E-mail:support@novatel.com. Web:www.novatel.com US&Canada). Антенные элементы настроены на частоту 1575,42 МГц. В случае использования ААР из четырех АЭ расположенных в одной плоскости в углах квадрата расстояние между соседними элементами может составлять 5-10 см. В свою очередь ААР располагают на удалении ~1 м. В общем случае плоскость ААС может быть произвольно ориентирована относительно осей симметрии объекта. В данном случае вносится склонение по углам α, β и θ в эталонные значения (блок 16) или в блок принятия решения 18. Выполненное макетирование заявляемого устройства показало, что последний сохраняет свою работоспособность при М=3 и N=2.
Малошумящие усилители 1.1.3.1-1.М.3.N выполняют функции предварительной избирательности по соседним каналам приема и усиления. Могут быть реализованы из последовательно подключенных PAW-фильтра 801-RF1575.42M-D и усилителя на базе MGA53543. Полоса пропускания фильтра около 1 МГц.
Радиотракты 1.1.4.1-1.M.4.N предназначены для обеспечения основной избирательности по соседним каналам приема, усиления и преобразования частоты сигнала 1575,42 МГц в частоту 90,42 МГц. Каждый из радиотрактов содержит последовательно соединенные первый PAW-фильтр, усилитель, второй PAW-фильтр, смеситель и усилитель промежуточной частоты. Первый и второй PAW-фильтры соответственно могут быть реализованы на элементах 801-RF1575.42M-G. Усилитель реализуют на микросхеме MGA53543. Смеситель может быть реализован по трансформаторной схеме. Усилитель промежуточной частоты может быть реализован из последовательно подключенных двух усилителей на базе элементов 2SC5551, в нагрузке которых находятся LC-фильтры.
Реализация блока формирования опорных напряжений 2 широко известна и трудностей не вызывает. Его назначение - сформировать гармоническое колебание с частотой, например 1485,42 МГц. Блок 2 может быть реализован на основе генератора управляемого напряжения UMS-1000 и синтезатора LMY2306.
Реализация блоков цифровой обработки 1.1.5.1-1.М.5.N известна и трудностей не вызывает. Блок 1.1.5.1-1.M.5.N предназначен для преобразования аналогового сигнала, поступающего с выхода блоков 1.1.4.1 -1.M.4.N, в цифровую форму и разложение их на квадратуры. На фиг. 8 описания устройства-прототипа (см. Пат. РФ №2374659) приведен вариант реализации блока цифровой обработки, который содержит аналого-цифровой преобразователь, цифровой генератор, первый и второй умножители соответственно, фазовращатель, первый и второй фильтры нижних частот.
В случае использования в ААР четырех каналов приема блоки цифровой обработки могут быть реализованы с помощью двух комплектов стандартных плат: субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Share ADSP-21062 (см. Руководство пользователя. E-mail:insys@arc.ru www-сервер www.insys.ru). Наиболее предпочтительным является вариант реализации блоков 1.1.5.1-1.M.5.N на базе ADC микросхем LTC2208 (аналого-цифровой преобразователь) в совокупности с использованием программируемой логической интегральной схемой FPGA фирмы Xilinx Virtex4SX35 (см. FPGA-Virtex4: http://www.xil-inx.com/products/silicon_solutions/fpgas/virtex/virtex4/index/htm).
Построение тактового генератора 3, обеспечивающего генерацию сигналов с частотой 120 МГц, известно и широко освещено в литературе (Радиоприемные устройства: учебное пособие по радиотехнике. Спец. ВУЗов / Ю.Т. Давыдов и др.; - М.: Высшая школа, 1989. - 342 с.; Функциональные узлы адаптивных компенсаторов помех: Часть 2. В.В. Никитченко. - Л.: ВАС - 1990. - 176 с.; Вениаминов Д.Р. и др. Микросхемы и их применение. - М.: Радио и связь, 1989. - 240 с.).
Реализация корреляторов 4.1-4.S известна и широко освещена в научно-технической литературе (см. B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Сетевые спутниковые радионавигационные системы. Под. ред. B.C. Шебшаевича - М.: Радио и связь 1993; Рэд Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Известно, что сигналы КА BPSK модулируются индивидуальными ПСП, называемые дальномерными кодами. Поэтому для измерения разности фаз сигналов предварительно необходимо снять априорно известную модуляцию ПСП, учесть доплеровский сдвиг частоты и задержку сигнала при его распространении. Эти задачи решаются с помощью блоков 4.1-4.S в совокупности с блоками 5.1-5.S и 7. В функции блоков 4.1-4.S входит учет (смещение) частоты принятого сигнала на значение  а также снятие ПСП-модуляции путем построения функции корреляции. Поступающая управляющая информация с блоков 7 и 5.1-5.S позволяет выделить позицию максимума функции корреляции Ks, а следовательно определить задержку сигнала при его распространении.
а также снятие ПСП-модуляции путем построения функции корреляции. Поступающая управляющая информация с блоков 7 и 5.1-5.S позволяет выделить позицию максимума функции корреляции Ks, а следовательно определить задержку сигнала при его распространении.
Все блоки корреляторов 4.1-4.S выполнены идентично и содержат цифровой генератор, генератор ПСП, М трактов обработки. Каждый тракт обработки содержит два смесителя, два умножителя соответственно, фазовращатель, два блока памяти.
Работа корреляторов подробно рассмотрена в Пат. РФ №2374659. Целесообразно блоки 4.1-4.S реализовывать на программируемой логической интегральной схеме фирмы Хilinх типа Virtex 45X35. На базе одной FPGA возможно реализовать до 16 корреляторов (см. FPGA-Virtex4: http://www.xilinx.com/products/silicon_solu-tions/fpgas/virtex/virtex4/index/htm). Алгоритм работы корреляторов приведен на фиг. 14.
Блоки 5.1-5.S предназначены для анализа качества принимаемых от КА сигналов и на его основе принимают решение о трансляции квадратур сигналов (соответствующих позициям Ks) на входы блоков вычисления разности фаз 12.1-12.S. Блоки анализа 5.1-5.S выполняют идентично, а вариант реализации одного из них приведен на фиг. 13 описания устройства-прототипа (см. Пат. РФ №2374659).
Блоки анализа могут быть реализованы с использованием сигнального процессора TMS320c6416 (см. TMS320c6416: http.//focus/ti/com/docs/prod/folders/print/TMS320c6416.html). Алгоритм работы блока анализа 8.5 приведен на фиг. 16.
Реализация коммутаторов 6.1-6.S широко известна и трудностей не вызывает (см. Справочник по интегральным микросхемам / Б.В. Тарабкин, С.В. Якубовский, Н.А. Барканов и др.; Под ред. Б.В. Тарабкина. - 2-е изд., перераб. и доп. - М.: Энергия, 1980. - 816 с.). Они имеют два устойчивых состояния и обеспечивают коммутацию выходных сигналов со значениями Ks блока 7 (вторая группа входов) и блоков 5.1-5.S (первая группа входов) соответствующей разрядности. Управляются сигналами с первого выхода блоков 5.1-5.S (потенциалами ТТЛ-го уровня).
Блок 7 предназначен для поочередной настройки корреляторов 4.1-4.S на сигналы обнаруженных КА. Блок начальной настройки корреляторов 7 содержит два дешифратора, блок сравнения, счетчик импульсов, S идентичных трактов анализа в составе двух блоков элементов И, цифрового генератора, генератора псевдослучайной последовательности, двух смесителей, фазовращателя, четырех умножителей, сумматора, блока извлечения квадратного корня и блока поиска максимума (см. фиг. 15 описания устройства-прототипа, Пат. РФ №2374659). Работа блока 7 подробно освещена там же (стр. 33-34).
Целесообразно блок начальной установки корреляторов 7 выполнить на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html). Алгоритм работы блока 7 приведен на фиг. 17.
Блок 8 (S+1-й коммутатор) предназначен для поочередного (по командам блока 7) подключения выходов блоков 12.1-12.S с результатами вычислений (выражение 6) ко входам вычитаемого соответствующих блоков вычитания 13.1-13.S. Может быть выполнен с помощью 5 блоков элементов И. Первые входы поблочно объединяют и соединяют с соответствующим адресным выходом блока 7. На вторые входы блоков подают значения  с выходов соответствующих блоков 12.1-12.5. Реализация блоков элементов И известна и трудностей не вызывает.
с выходов соответствующих блоков 12.1-12.5. Реализация блоков элементов И известна и трудностей не вызывает.
Реализация радионавигатора 9 известна и широко освещена в литературе (см. U-blox: http://www.u-blox.com/customersupport/antaris4_doc.html).
Блок управления 11 выполняет две основные функции:
хранение координат центров элементарных зон привязки (X, Y,Z)p;
сравнение значений (X, Y, Z)p с координатами обнаруженного КА (X, Y, Z)s.
Реализация первой функции осуществляют с помощью перепрограммируемого блока памяти, в который на подготовительном этапе записывают значения (X, Y, Z)p. Адреса размещения (X, Y, Z)p соответствуют номерам «p» элементарных зон привязки, р=1,2, …, Р.
Реализация блока 11 известна и широко освещена в литературе (см. Пат. РФ №2374659, фиг. 16). Легко реализуется на дискретных элементах, например на микросхемах с ТТЛ-уровнями сигналов 555, 1533 и др. серий.
Блоки измерения разности фаз 12.1-12.S обеспечивают вычисление разности фаз (выражение 9) между сигналами, принятыми в нулевой и других МЛ ААР. Все 5 блоков измерения разности фаз 12.1-12.S выполняются идентично. Реализация блоков 12.1-12.S известна и трудностей не вызывает (см. Пат. РФ №2283505, МПК6 G01S 13/46, опубл. 10.09.2006 г. бюл. №25). Алгоритм работы блоков 12.1-12.S представлен на фиг. 15.
Реализация S блоков вычитания 13.1-13.S известна и трудностей не вызывает. С помощью блоков 13.1-13.S осуществляется вычисление в соответствии с выражением 6. Блоки 13.1-13.S могут быть выполнены на дискретных элементах (элементарной логики) по известным схема (Рэд Э. Справочное пособие по высокочастотной схемотехнике: Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок 14 предназначен для хранения эталонных значений разностей фаз  которые записываются в него с выхода блока 16. Номера ячеек памяти, в которые записаны значения
которые записываются в него с выхода блока 16. Номера ячеек памяти, в которые записаны значения  и номера элементарных зон привязки р находятся в строгом соответствии. Емкость G блока памяти 14 определяется выражением:
и номера элементарных зон привязки р находятся в строгом соответствии. Емкость G блока памяти 14 определяется выражением:

Реализация блока 14 известна и трудностей не вызывает (см. Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.; Большие интегральные микросхемы запоминающих устройств: Справочник / А.Ю. Гордонов и др.; Под ред. А.Ю. Гордонова и Ю.Н. Дьякова. - М.: Радио и связь, 1990. - 288 с.).
Первый вычислитель-формирователь 17 предназначен для формирования трехмерной матрицы измерений R(α, β, θ) размерности (I+1) ⋅ (J+1) ⋅ (L+1). Предварительно рассчитывают значения элементов  матрицы измерений R(α, β, θ). С этой целью измеренные блоками 13.1-13.5 разности фаз
матрицы измерений R(α, β, θ). С этой целью измеренные блоками 13.1-13.5 разности фаз  возводят в квадрат и суммируют в соответствии с (7) (см. фиг. 8). Найденные значения элементов
возводят в квадрат и суммируют в соответствии с (7) (см. фиг. 8). Найденные значения элементов  записывают в трехмерный массив матрицы измерений R(α, β, θ) по адресу
записывают в трехмерный массив матрицы измерений R(α, β, θ) по адресу  (см. фиг. 9). В качестве адреса записи выступают значения углов
(см. фиг. 9). В качестве адреса записи выступают значения углов  которые хранят в блоке 14 совместно с эталонными разностями фаз и сопровождают их в процессе вычислений в блоках 13.1-13.S. В связи с тем, что на блок 17 приходится значительная часть временных затрат устройства, последний целесообразно реализовать на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/fold-ers/print/TMS320c6416.html). Алгоритм формирования матрицы измерений R(α, β, θ) приведен на фиг. 10.
которые хранят в блоке 14 совместно с эталонными разностями фаз и сопровождают их в процессе вычислений в блоках 13.1-13.S. В связи с тем, что на блок 17 приходится значительная часть временных затрат устройства, последний целесообразно реализовать на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/fold-ers/print/TMS320c6416.html). Алгоритм формирования матрицы измерений R(α, β, θ) приведен на фиг. 10.
Блок принятия решения 18 предназначен для определения элемента матрицы измерений R(α, β, θ) с адресом  (ячейки памяти запоминающего устройства из состава блока 17) с минимальной суммой
(ячейки памяти запоминающего устройства из состава блока 17) с минимальной суммой  соответствующей искомым угловым параметрам антенной решетки (объекта)
соответствующей искомым угловым параметрам антенной решетки (объекта) 
Структурная схема блока принятия решения 18 приведена на фиг. 21 описания устройства прототипа, а описание его работы - на страницах 39-40 (там же). Блок 18 также целесообразно реализовать на сигнальном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html). Алгоритм работы блока принятия решения приведен на фиг. 13.
Реализация блока индикации 19 известна и трудностей не вызывает (см. Быстрое А.Ю. и др. Сто схем с индикаторами / Быстрое А.Ю. и др. - М.: Радио и связь, 1990. - 112 с.; Пароль Н.В., Кайдалов С.А. Знакосинтезирующие индикаторы и их применение: Справочник. - М.: Радио и связь. 1998. - 128 с.).
Второй вычислитель-формирователь 16 предназначен для вычисления эталонных разностей Δϕэт.m0(α,β,θ)р для всех элементарных зон привязки bp, р=1,2, …, Р и всех возможных углов ориентации (α, β, θ) ЛА. Данная функция блоком 16 выполняется в два этапа. На подготовительном этапе находят расчетные разности фаз Δϕpac.mn0(α, β, θ)р для всех пар АЭ mn0, m=1,2, …, М, n=1,2, …, N, всех элементарных зон привязки и всех возможных углов (α, β, θ) ориентации ААС (ЛА). В процессе работы найденные значения Δϕpac.mn0(α, β, θ)р уточняют с использованием соответствующих значений ВВК  Для выполнения названных функций по первой входной шине 15 на вход блока 16 поступают значения координат центров элементарных зон привязки (X, Y,Z)p. По третьей входной шине 21 на вход блока 16 поступают координаты АЭ (X,Y,Z)mn, расстояние между АЭ dmn, углы поворота ААС (ЛА), диапазон измерений пространственных углов (αmin,αmах), (βmin, βmах) и (θmin, θmах). Кроме того, на входы блока 16 поступают текущие значения ВВК
Для выполнения названных функций по первой входной шине 15 на вход блока 16 поступают значения координат центров элементарных зон привязки (X, Y,Z)p. По третьей входной шине 21 на вход блока 16 поступают координаты АЭ (X,Y,Z)mn, расстояние между АЭ dmn, углы поворота ААС (ЛА), диапазон измерений пространственных углов (αmin,αmах), (βmin, βmах) и (θmin, θmах). Кроме того, на входы блока 16 поступают текущие значения ВВК  m=1,2, …, М, для всех М ААР 1.1-1.М. В связи с тем, что блоком 16 выполняется большой объем вычислений, его целесообразно реализовать на плате цифровой обработки сигналов Packet 8 (TMS 320С6455 CTZ Texas Instruments), алгоритм работы которого представлен на фиг. 5а, б.
m=1,2, …, М, для всех М ААР 1.1-1.М. В связи с тем, что блоком 16 выполняется большой объем вычислений, его целесообразно реализовать на плате цифровой обработки сигналов Packet 8 (TMS 320С6455 CTZ Texas Instruments), алгоритм работы которого представлен на фиг. 5а, б.
Реализация блоков вычисления ВВК 1.1.1-1.1.M предполагает использование многоразрядных умножителей, сумматоров, таблицы истинности, регистров. Управление этапами работы всех составляющих блоков 1.1.1-1.1.M предполагает использование конечного автомата. С этой целью также удобно использовать аппаратные модули DSP 48Е1, входящие в состав ПЛИС FPGA производства Xilinx (см. DPS 48 Micro v. 3.0 Logi CORE IP Product Guide). Работа последних осуществляется в соответствии с алгоритмом, приведенном на фиг. 3. Для реализации вычисления комплексного ВВК одной ААР из m АЭ требуется 2+2m блоков DSP 48Е1. Два блока используют для вычисления действительной и мнимой части отсчета выходного сигнала ААР, а остальные 2 m - для нахождения весовых коэффициентов. На фиг. 18 представлена структурная схема девятиканального устройства определения угловой ориентации летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2374659C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| Способ контроля излучения источника в заданном направлении | 2019 |
|
RU2713514C1 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2015 |
|
RU2595565C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |

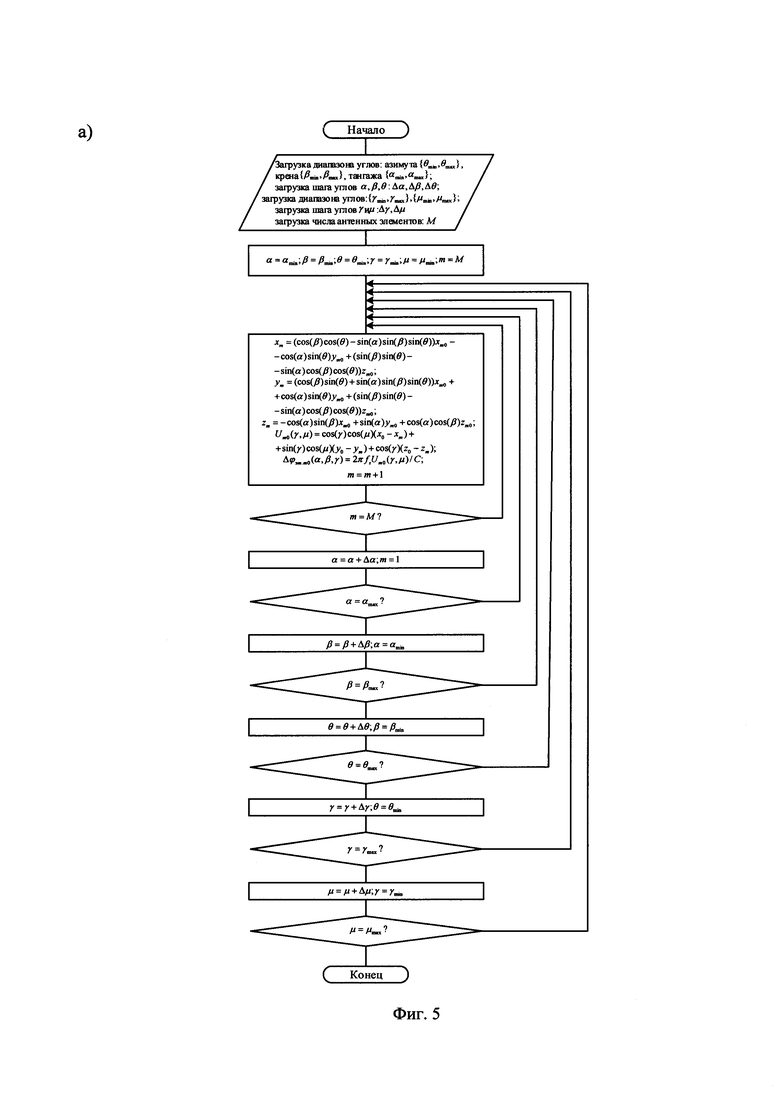
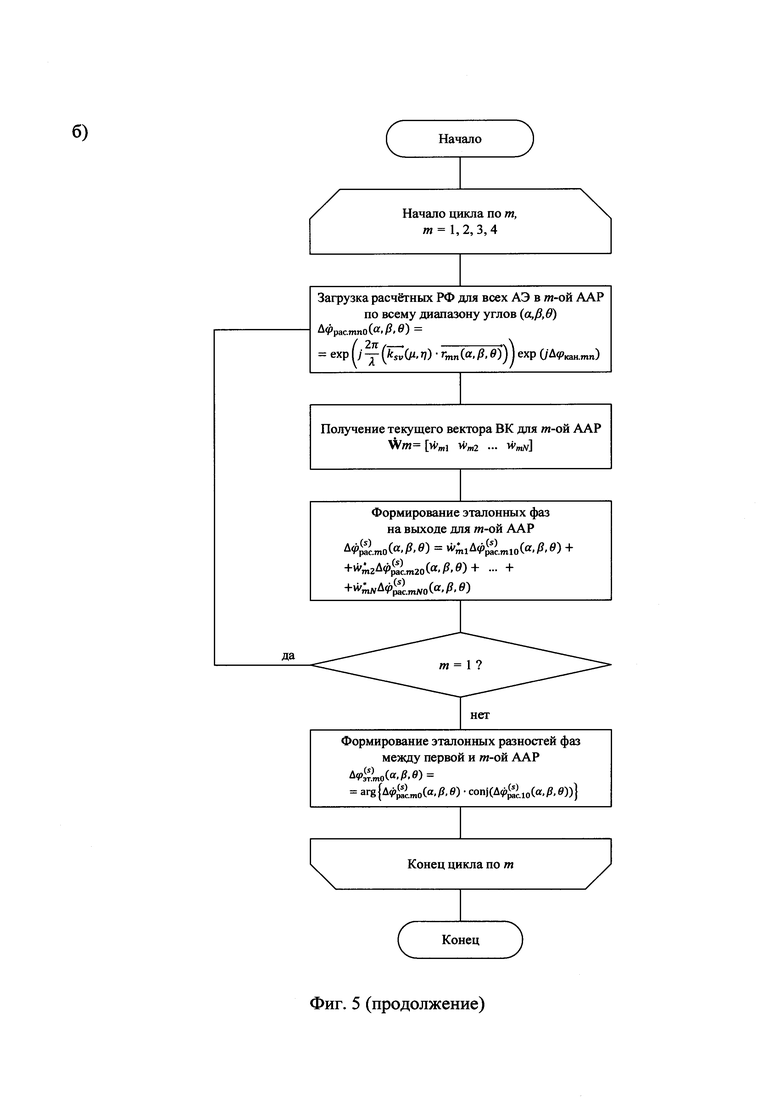
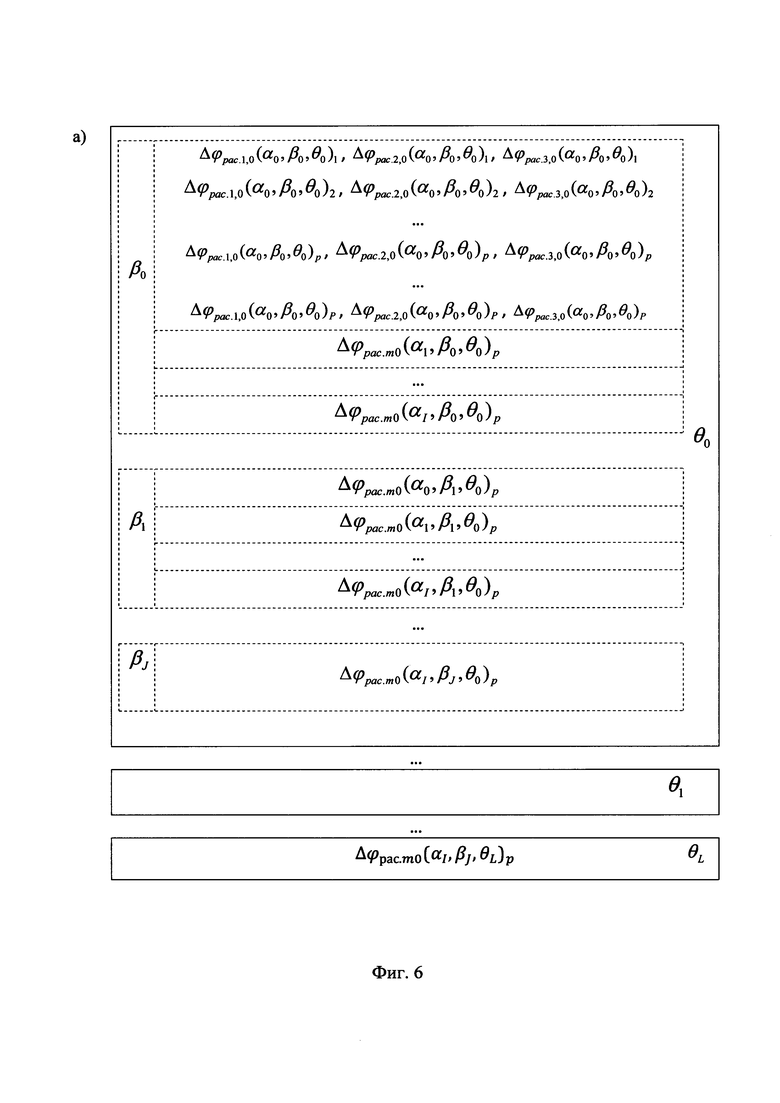
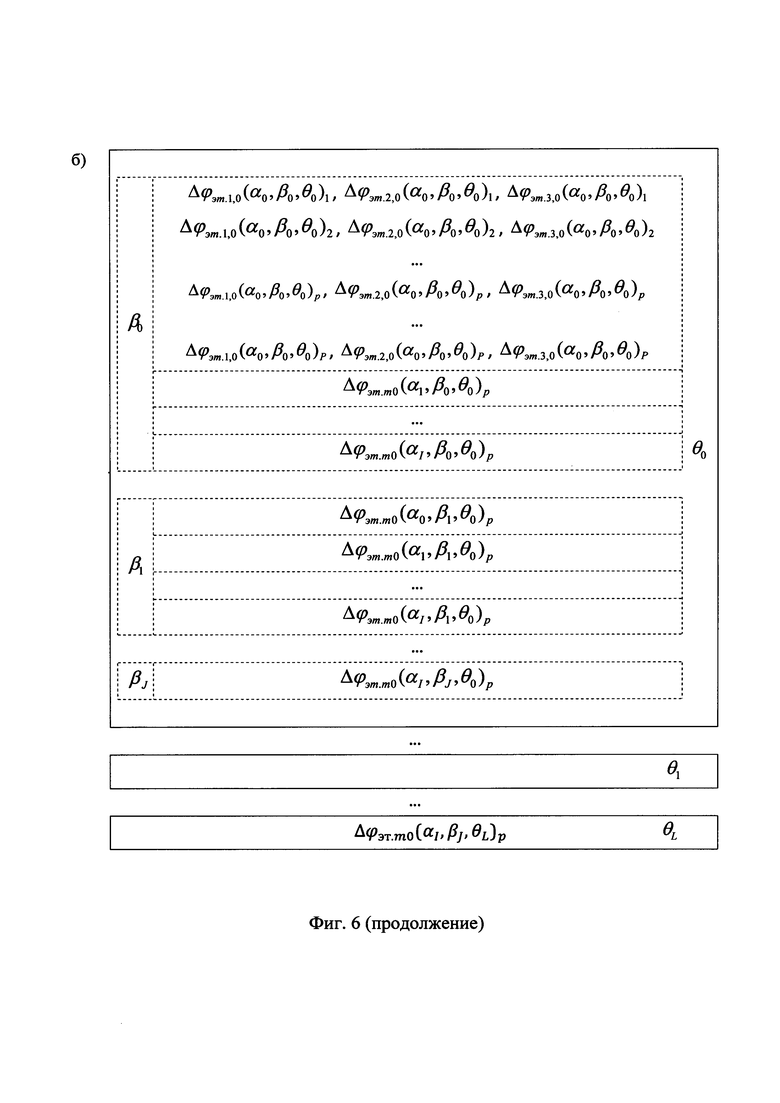
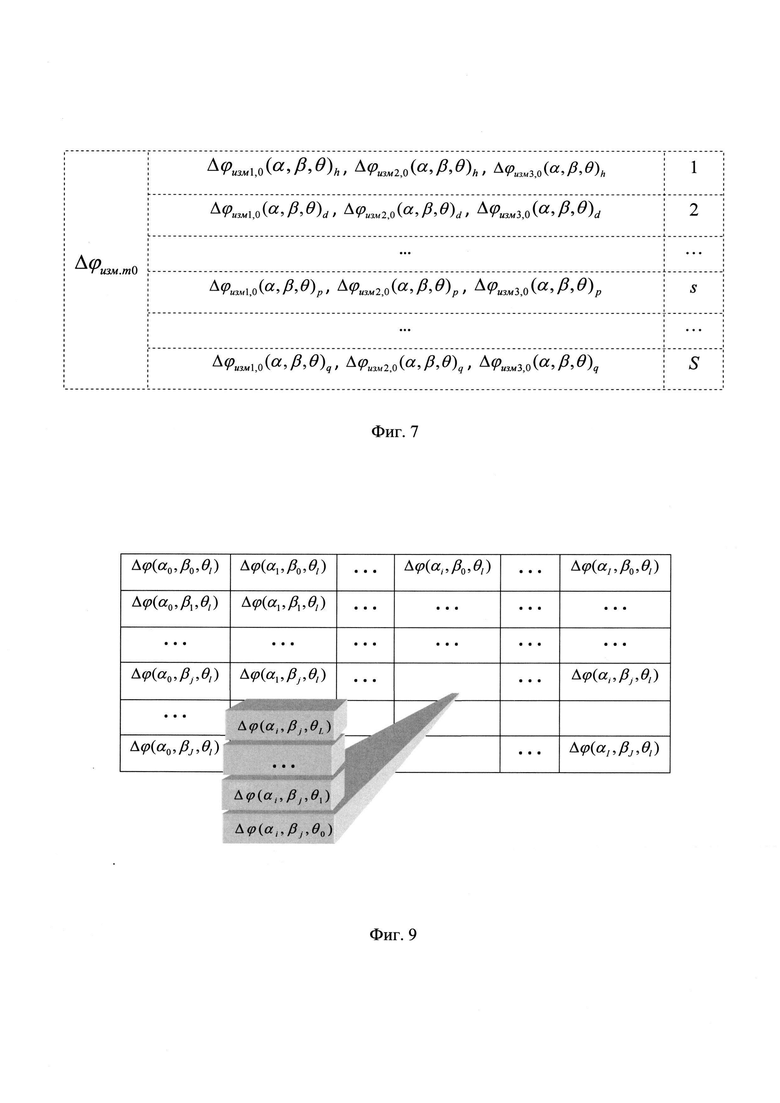

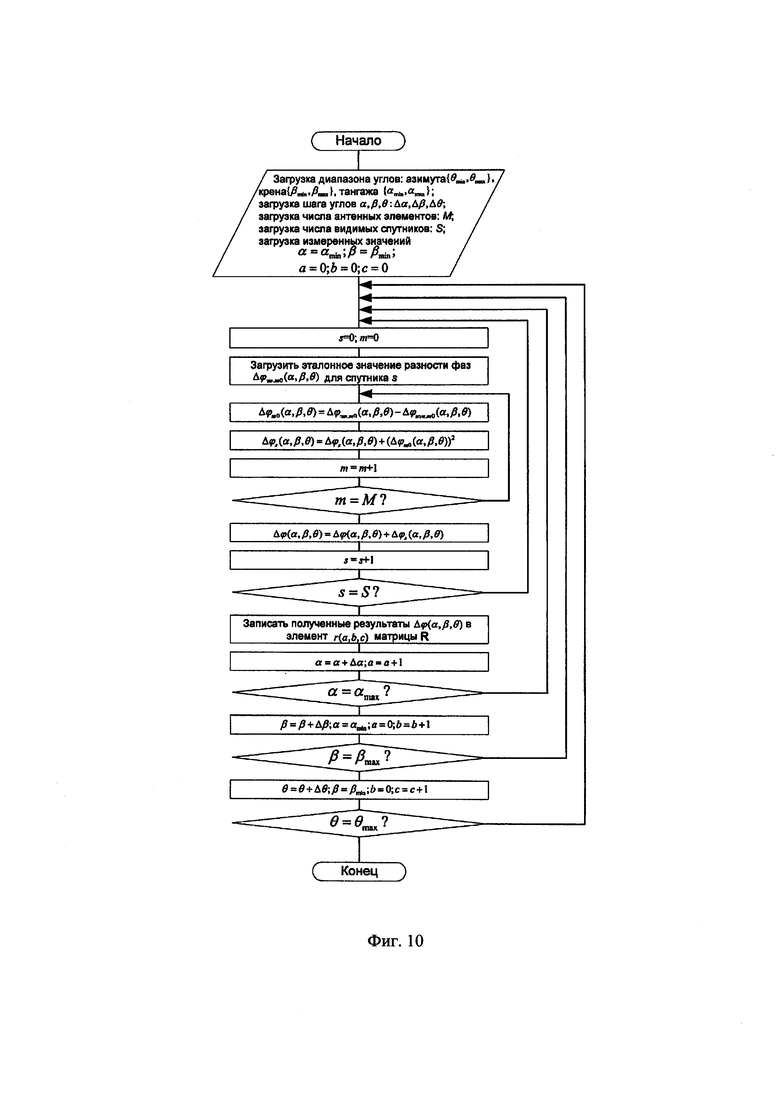
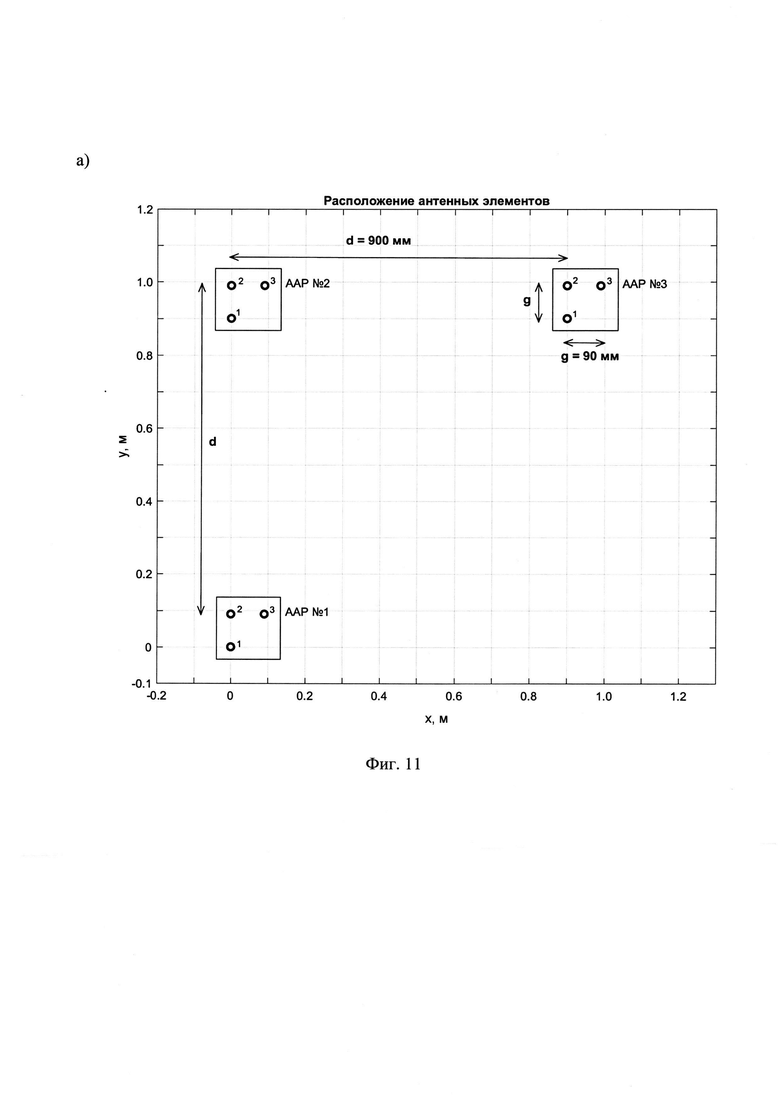
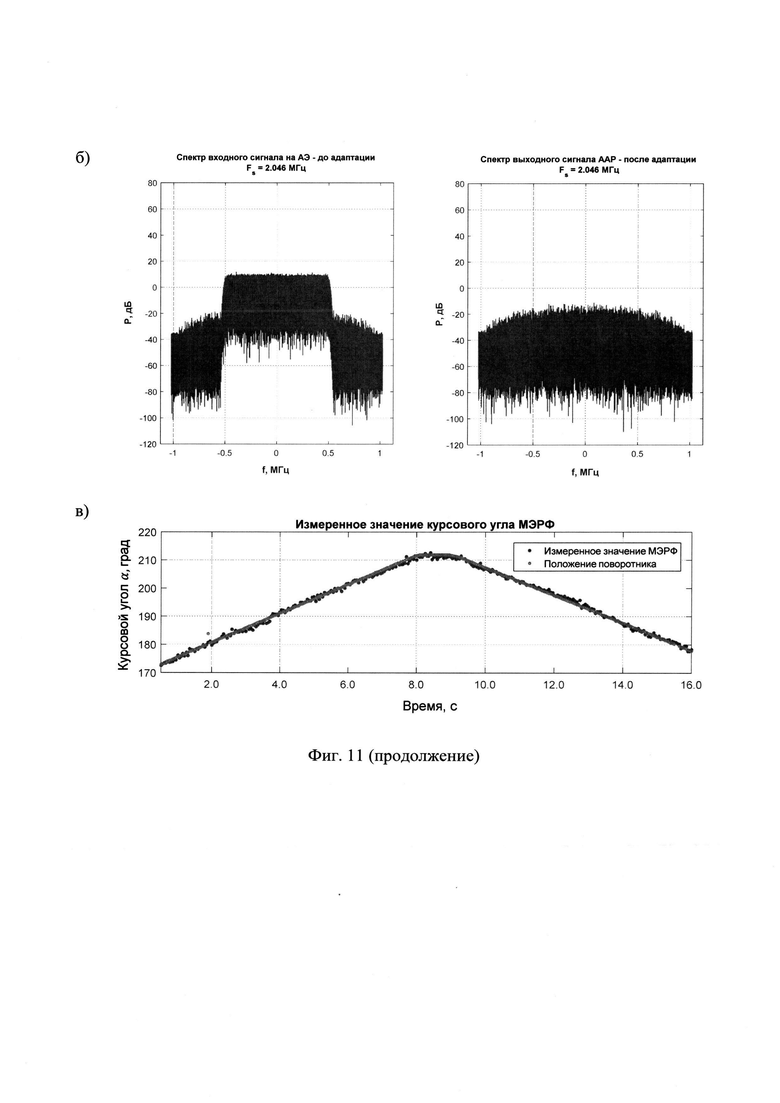
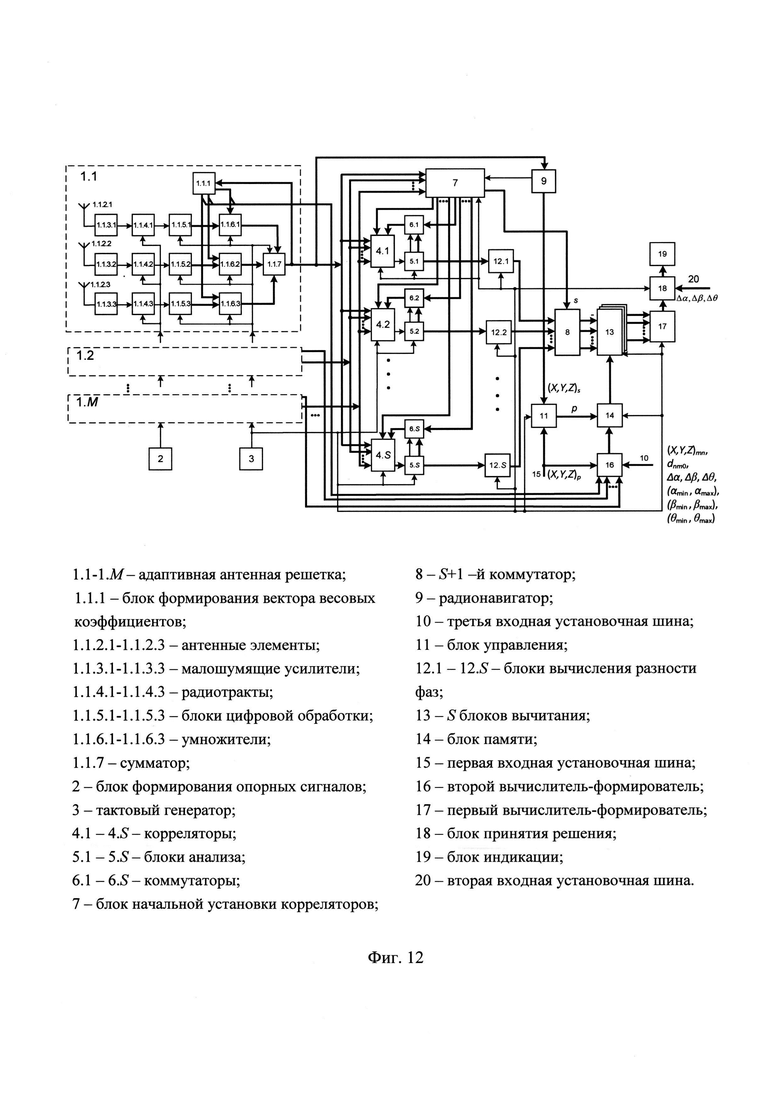
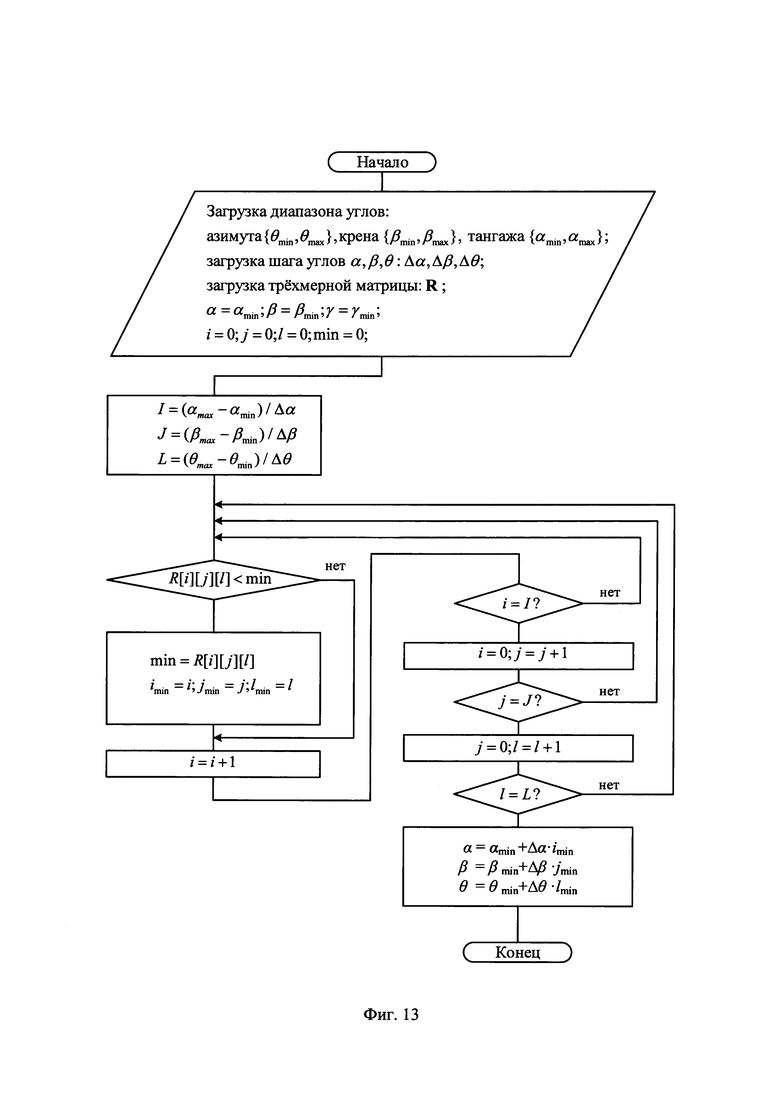
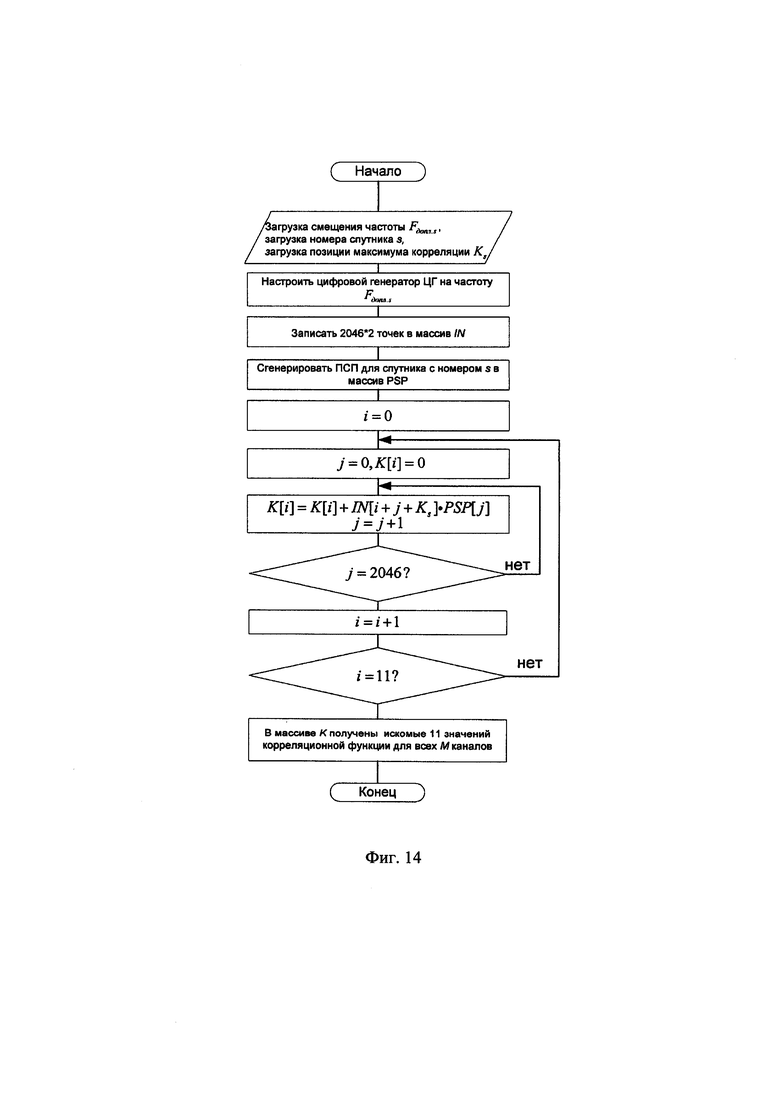
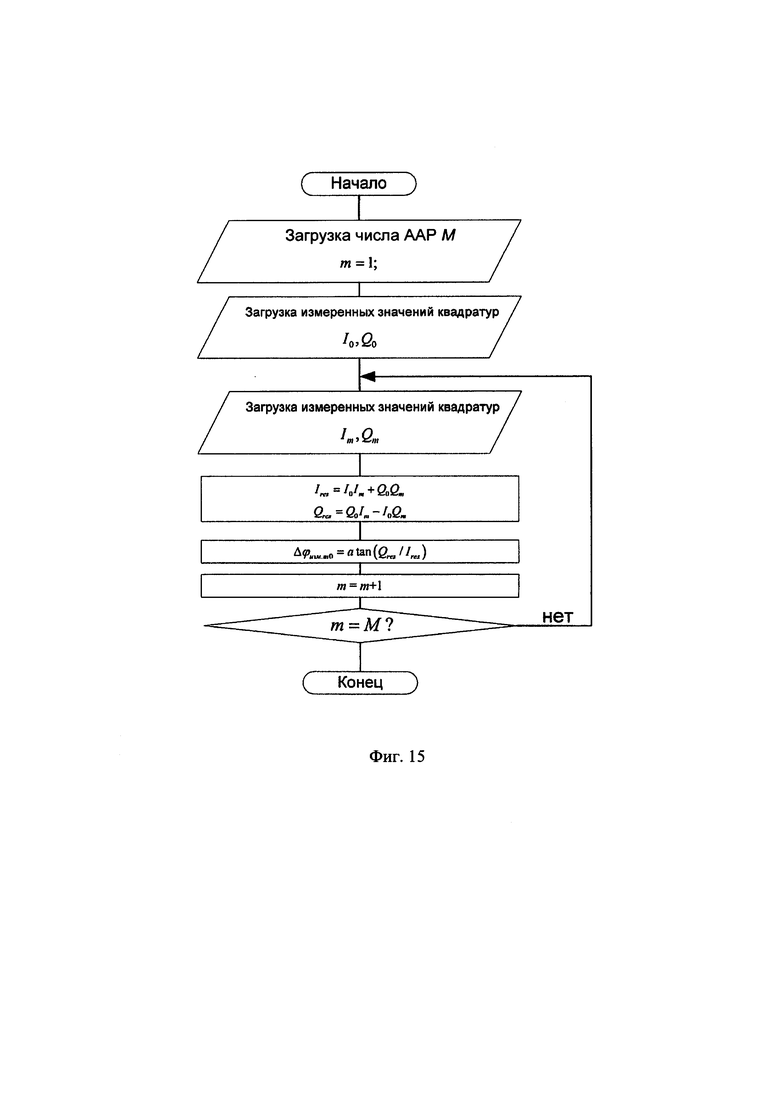
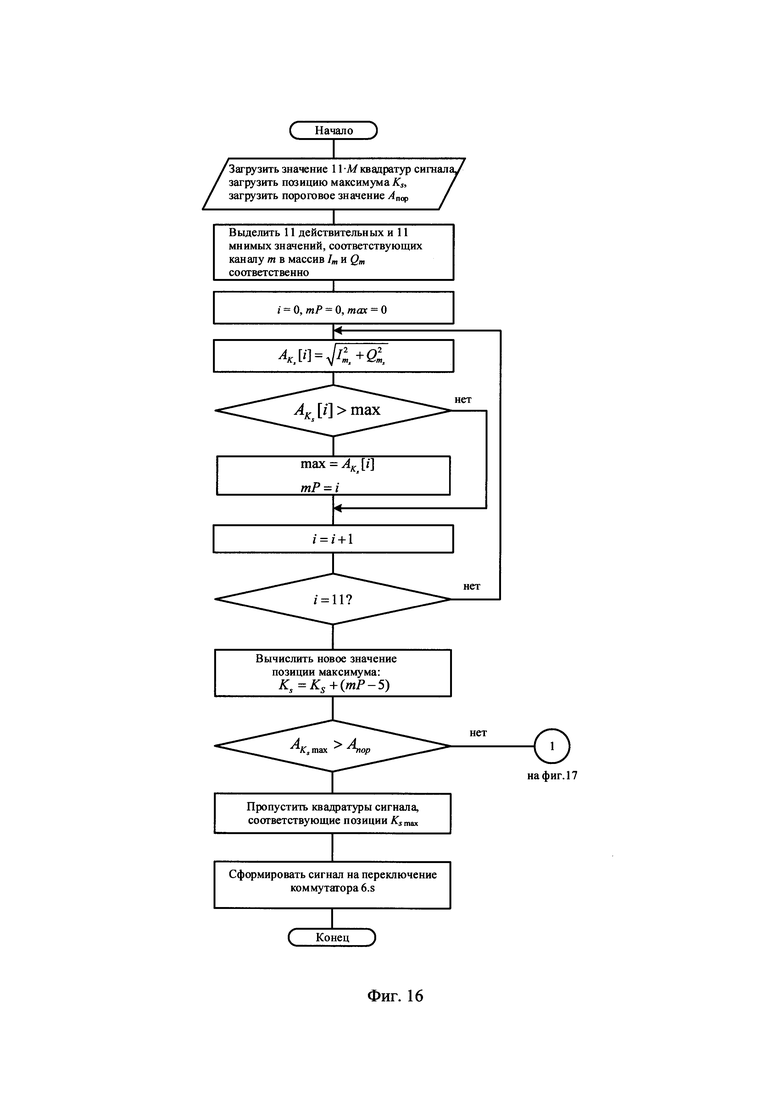
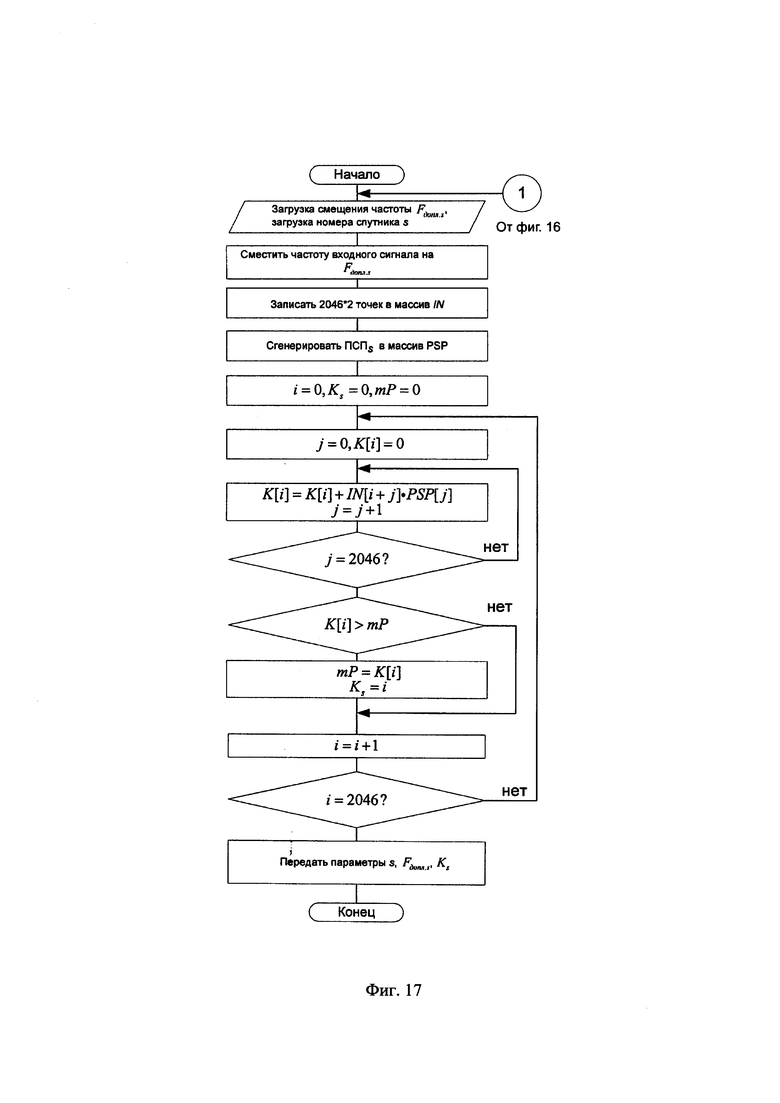
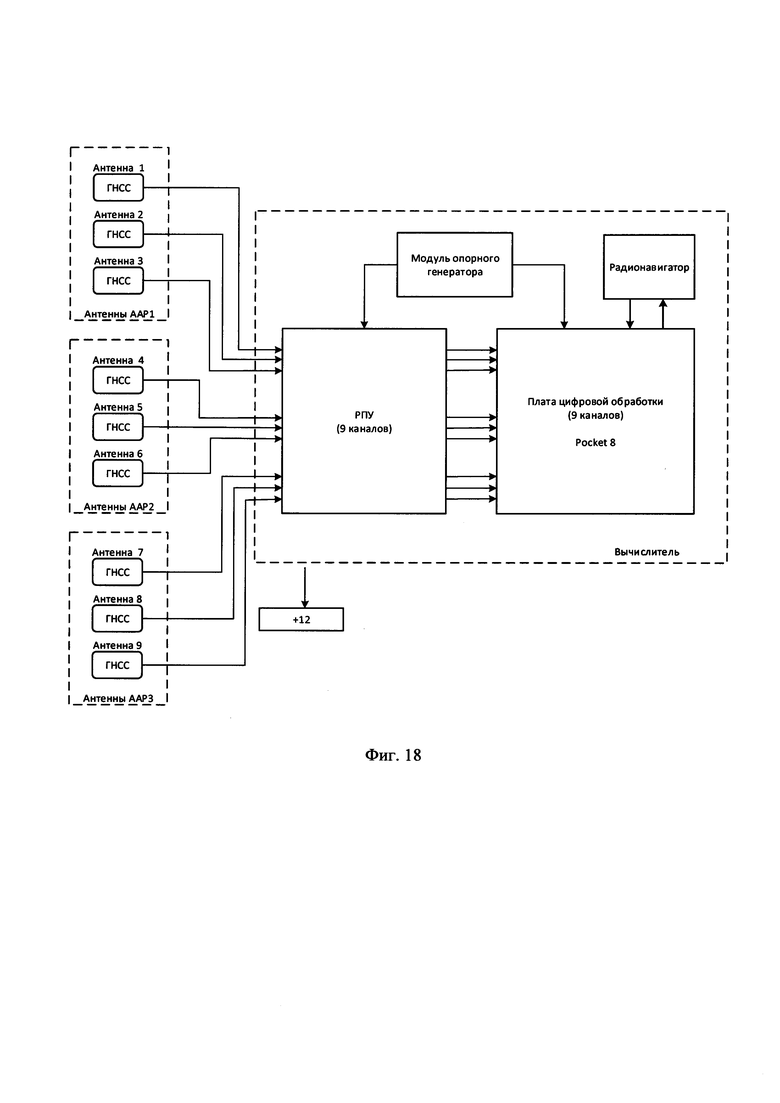
Группа изобретений относятся к радиотехнике и может быть использована для определения угловой ориентации летательных аппаратов (ЛА) в пространстве и на плоскости. Техническим результатом является повышение помехоустойчивости к воздействию преднамеренных помех. В способе определение угловой ориентации летательных аппаратов осуществляют с использованием оптимизированной пространственной фильтрации при приеме сигналов космических аппаратов (КА) глобальной навигационной спутниковой системы (ГНСС), основанной на критерии минимума выходной мощности. Способ отличается от известных вычислением эталонных разностей фаз Δϕэт. Значения Δϕэт определяют по разности сигналов двух адаптивных антенных решеток (ААР), при этом учитывается амплитудно-фазовое смещение, вносимое каждой ААР. С этой целью в расчетных разностях фаз учитывают значения вектора весовых коэффициентов (ВВК) соответствующих ААР. Устранено противоречие при реализации адаптивной антенной системы, связанное с одновременным выполнением пространственной фильтрации помех и угловой ориентации ЛА путем замены М антенных элементов на М ААР. Устройство определения угловой ориентации ЛА, реализующее способ, содержит М идентичных ААР из N антенных элементов, М≥3, N≥2, блок формирования опорных сигналов, тактовый генератор, S корреляторов, S блоков анализа, S+1 коммутаторов, блок начальной установки корреляторов, S блоков вычитания, блок памяти, первый и второй вычислители-формирователи, блок принятия решения, блок управления, блок индикации, три входные установочные шины, радионавигатор, определенным образом соединенные между собой. 2 н.п. ф-лы, 18 ил.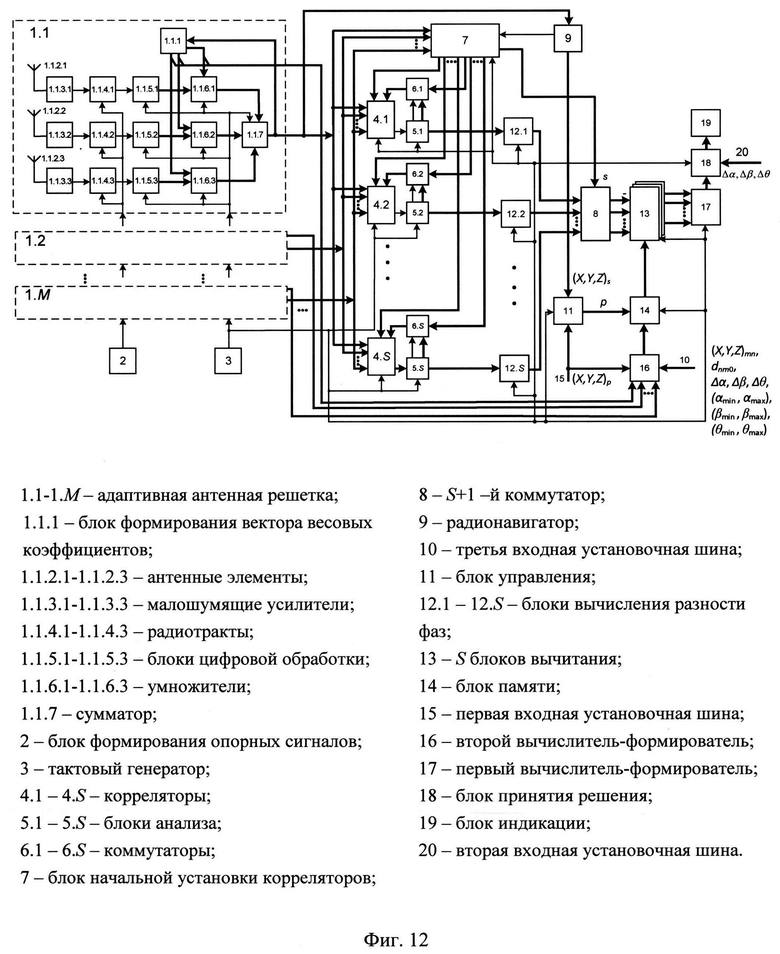
1. Способ определения угловой ориентации летательных аппаратов, основанный на том, что на подготовительном этапе или в процессе полета летательного аппарата сферу над антенной системой (АС) равномерно разбивают на  элементарных зон привязки, где D и D0 - соответственно площади сферы на удалении нескольких тысяч километров от центра АС и элементарной зоны привязки, присваивают каждой элементарной зоне привязки порядковый номер bp, р=1,2, …, Р, определяют координаты местоположения центров элементарных зон привязки (X, Y, Z)p, рассчитывают для каждой пары антенных элементов АС Аm0, m=1,2, …, М - 1, М - количество использованных в АС антенных элементов (АЭ), эталонные значения разности фаз прихода сигналов относительно координат местоположения центров каждой р-й элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где
элементарных зон привязки, где D и D0 - соответственно площади сферы на удалении нескольких тысяч километров от центра АС и элементарной зоны привязки, присваивают каждой элементарной зоне привязки порядковый номер bp, р=1,2, …, Р, определяют координаты местоположения центров элементарных зон привязки (X, Y, Z)p, рассчитывают для каждой пары антенных элементов АС Аm0, m=1,2, …, М - 1, М - количество использованных в АС антенных элементов (АЭ), эталонные значения разности фаз прихода сигналов относительно координат местоположения центров каждой р-й элементарной зоны привязки Δϕэт.m0(α0,β0,θ0)р, где  - соответственно значения углов тангажа, крена и азимута АС, последовательно дискретно изменяют ориентацию АС на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmах), (βmin, βmax) и (θmin, θmах), (αmax - αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmax - θmin)/Δθ=L без изменения центра AC относительно центров элементарных зон привязки, для каждого положения АС
- соответственно значения углов тангажа, крена и азимута АС, последовательно дискретно изменяют ориентацию АС на заданные значения углов Δα, Δβ и Δθ в предварительно заданных интервалах (αmin, αmах), (βmin, βmax) и (θmin, θmах), (αmax - αmin)/Δα=I, (βmах - βmin)/Δβ=J, (θmax - θmin)/Δθ=L без изменения центра AC относительно центров элементарных зон привязки, для каждого положения АС  и для каждого центра элементарных зон привязки рассчитывают эталонные значения разности фаз
и для каждого центра элементарных зон привязки рассчитывают эталонные значения разности фаз  и запоминают их, а в процессе работы принимают сигналы от первого обнаруженного космического аппарата (КА) глобальной навигационной спутниковой системы, измеряют разности фаз принимаемых сигналов в антенных элементах АС Δϕизм.m0(α, β, θ)р, вычисляют разность между эталонными разностями фаз, соответствующими углам АС α0, β0, θ0 для bр-й элементов зоны привязки с измеренными разностями фаз сигнала первого КА с априорно известным местоположением bp(X,Y,Z):
и запоминают их, а в процессе работы принимают сигналы от первого обнаруженного космического аппарата (КА) глобальной навигационной спутниковой системы, измеряют разности фаз принимаемых сигналов в антенных элементах АС Δϕизм.m0(α, β, θ)р, вычисляют разность между эталонными разностями фаз, соответствующими углам АС α0, β0, θ0 для bр-й элементов зоны привязки с измеренными разностями фаз сигнала первого КА с априорно известным местоположением bp(X,Y,Z): 
 измеренные разности фаз возводят в квадрат и суммируют по всем М - 1 используемым в работе парам АЭ:
измеренные разности фаз возводят в квадрат и суммируют по всем М - 1 используемым в работе парам АЭ:
результаты вычислений Δϕ1(α0,β0,θ0) запоминают, принимают сигналы от других S-1 КА и определяют значения Δϕs(α0,β0,θ0) для всех S наблюдаемых s=1,2, …, S КА, результаты вычислений суммируют:
и запоминают в элементе r(1,1,1) трехмерной матрицы измерений R(α,β,θ), вычисляют значения  для всех возможных углов
для всех возможных углов  ориентации AC, i=0,1,2, …, I, j=0,1,2, …, J,
ориентации AC, i=0,1,2, …, I, j=0,1,2, …, J,  а полученные результаты записывают в соответствующие элементы
а полученные результаты записывают в соответствующие элементы  трехмерной матрицы измерений R(α,β,θ), а за измеренную ориентацию АС и летательного аппарата принимают значения углов
трехмерной матрицы измерений R(α,β,θ), а за измеренную ориентацию АС и летательного аппарата принимают значения углов  соответствующие элементу
соответствующие элементу  матрицы измерений R(α,β,θ), имеющему минимальное значение, отличающийся тем, что прием сигналов КА осуществляют на АС, содержащей М идентичных антенных решеток (АР), расположенных в плоскости приема нелинейно и содержащих по N, N≥2, идентичных ненаправленных АЭ, для каждой m-й АР формируют вектор весовых коэффициентов
матрицы измерений R(α,β,θ), имеющему минимальное значение, отличающийся тем, что прием сигналов КА осуществляют на АС, содержащей М идентичных антенных решеток (АР), расположенных в плоскости приема нелинейно и содержащих по N, N≥2, идентичных ненаправленных АЭ, для каждой m-й АР формируют вектор весовых коэффициентов 
 размерности N, принятый каждым n-м АЭ m-й АР сигнал
размерности N, принятый каждым n-м АЭ m-й АР сигнал  комплексно умножают на соответствующий ему элемент
комплексно умножают на соответствующий ему элемент  вектора весовых коэффициентов
вектора весовых коэффициентов  суммируют полученные значения в рамках каждой m-й АР, М значений которых используют для измерения разности фаз принимаемых сигналов Δϕизм.m0(α,β,θ)р и последующего уточнения значений
суммируют полученные значения в рамках каждой m-й АР, М значений которых используют для измерения разности фаз принимаемых сигналов Δϕизм.m0(α,β,θ)р и последующего уточнения значений  m=1,2, …, М, а эталонные разности фаз Δϕэт.m0(α0,β0,θ0)р рассчитывают в два этапа, на подготовительном этапе находят и запоминают расчетные разности фаз прихода сигнала из каждой р-й элементарной зоны привязки между опорным АЭ и всеми другими АЭ АС для всех возможных положений АС
m=1,2, …, М, а эталонные разности фаз Δϕэт.m0(α0,β0,θ0)р рассчитывают в два этапа, на подготовительном этапе находят и запоминают расчетные разности фаз прихода сигнала из каждой р-й элементарной зоны привязки между опорным АЭ и всеми другими АЭ АС для всех возможных положений АС  а в процессе работы полученные в рамках каждой АР расчетные разности фаз уточняют путем умножения на соответствующие им элементы
а в процессе работы полученные в рамках каждой АР расчетные разности фаз уточняют путем умножения на соответствующие им элементы  вектора весовых коэффициентов
вектора весовых коэффициентов  и суммируют, а эталонные разности фаз Δϕэт.m0(α0,β0,θ0)р определяют как разность суммарных фаз сигнала между антенными решетками.
и суммируют, а эталонные разности фаз Δϕэт.m0(α0,β0,θ0)р определяют как разность суммарных фаз сигнала между антенными решетками.
2. Устройство определения угловой ориентации летательных аппаратов, включающее М, М≥3, идентичных приемных каналов из последовательно соединенных антенного элемента, малошумящего усилителя, радиотракта и блока цифровой обработки, предназначенного для преобразования аналогового сигнала в цифровую форму и разложения его на квадратуры, блок формирования опорных сигналов, выход которого соединен со вторыми входами радиотрактов приемных каналов, тактовый генератор, S корреляторов, S блоков анализа, предназначенных для оценки качества принимаемых от космических аппаратов сигналов, S+1 коммутаторов, блок начальной установки корреляторов, S блоков вычисления разности фаз, S блоков вычитания, блок памяти, первый вычислитель-формирователь, предназначенный для формирования трехмерной матрицы измерений R(α,β,θ), блок принятия решения, предназначенный для нахождения элемента трехмерной матрицы измерений с минимальным значением, блок управления, предназначенный для хранения координат центров элементарных зон привязки и сравнения этих координат с координатами обнаруженного космического аппарата, блок индикации, первую и вторую входные установочные шины, радионавигатор, первый информационный выход которого соединен со входом управления блока начальной установки корреляторов, группы информационных входов которого объединены с соответствующими группами информационных входов корреляторов, тактовые входы которых объединены и соединены с тактовыми входами блоков цифровой обработки приемных каналов, выходом тактового генератора, входами синхронизации корреляторов, тактовыми входами блока управления, блоков вычисления разности фаз, блока памяти, блоков вычитания, первого вычислителя-формирователя, блока принятия решения, блока начальной установки корреляторов, S+1-го коммутатора, блоков анализа, вторые группы информационных выходов которых соединены с группами информационных входов соответствующих блоков вычисления разности фаз, первые выходы блоков анализа соединены со входами управления соответствующих коммутаторов, третьи группы выходов блоков анализа соединены с первыми группами информационных входов соответствующих коммутаторов, группы информационных входов блоков анализа соединены с группами информационных выходов соответствующих корреляторов, первые группы входов управления которых соединены с соответствующими первыми группами информационных выходов блока начальной установки корреляторов, вторые группы входов управления корреляторов соединены с группами выходов соответствующих коммутаторов, вторые группы информационных входов которых соединены с соответствующими вторыми группами информационных выходов блока начальной установки корреляторов, группы информационных выходов блоков вычисления разности фаз соединены с соответствующими группами входов S+1-го коммутатора, группа адресных входов которого соединена с группой адресных выходов блока начальной установки корреляторов, a S групп информационных выходов соединены с группами входов вычитаемого соответствующих блоков вычитания, группы входов уменьшаемого которых объединены и соединены с группой информационных выходов блока памяти, группа адресных входов которого соединена с группой информационных выходов блока управления, вторая группа информационных входов которого является первой входной установочной шиной устройства определения угловой ориентации летательных аппаратов, первая группа информационных входов блока управления соединена со второй группой информационных выходов радионавигатора, группа информационных выходов первого вычислителя-формирователя соединена с первой группой информационных входов блока принятия решения, вторая группа информационных входов которого соединена со второй входной установочной шиной устройства определения угловой ориентации летательных аппаратов, а группа информационных выходов соединена с группой информационных входов блока индикации, отличающееся тем, что дополнительно введены (М - 1) × N идентичных приемных каналов, а все М × N приемных каналов разделены на М адаптивных антенных решеток (ААР), содержащих по N параллельно подключенных приемных каналов, каждый из которых дополнен умножителем, первая группа комплексных входов которого соединена с выходами соответствующего блока цифровой обработки, а каждая адаптивная антенная решетка дополнена сумматором и блоком формирования весовых коэффициентов, N групп выходов которого соединены со вторыми группами входов соответствующих умножителей, группы выходов которых соединены с соответствующими группами входов сумматора, группа выходов которого является первой группой выходов адаптивной антенной решетки и подключена к соответствующей группе информационных входов блока начальной установки корреляторов, вторая группа выходов ААР соединена с выходами блока формирования вектора весовых коэффициентов, второй вычислитель-формирователь, предназначенный для расчета эталонных значений разностей фаз, М групп входов которого соединены с соответствующими вторыми группами выходов адаптивных антенных решеток, М+1-я группа входов соединена с первой входной установочной шиной устройства, M+2-я группа информационных входов является третьей входной установочной шиной устройства, предназначена для ввода координат антенных элементов адаптивных антенных решеток и взаимных расстояний между ними, группа информационных выходов второго вычислителя-формирователя соединена с группой информационных входов блока памяти, антенный вход радионавигатора соединен с первым выходом первой ААР, а входы синхронизации второго вычислителя-формирователя, умножителей и сумматоров соединены с выходом тактового генератора.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2374659C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ ГЛОБАЛЬНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2578671C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| US 5296861 A, 22.03.1994 | |||
| СПОСОБ ПОДГОТОВКИ ПОЛИМЕТАЛЛИЧЕСКОЙ КОЛЧЕДАННОЙ РУДЫ К ФЛОТАЦИИ | 1970 |
|
SU420338A1 |
| US 6292132 B1, 18.09.2001 | |||
| US 5841370 A, 24.11.1998 | |||
| Конденсаторный микрофон | 1930 |
|
SU19666A1 |

