Изобретение относится к области радиотехники, в частности к области антенной техники, и может использоваться в составе панорамных радиоприемных устройств в ходе радиомониторинга радиоэлектронной обстановки и оценке параметров сигналов источников радиоизлучений.
Одной из важных задач, решаемых при проведении ряда мероприятий радиоэлектронного (радиотехнического) обеспечения, является оценка радиоэлектронной обстановки (РЭО) в некотором районе (секторе) пространства. При этом достаточно часто возникает необходимость оценивания параметров сигналов источников радиоизлучений (ИРИ). Известно, что достоверность и точность оценок зависят от отношения сигнал / (помеха + шум) (ОСПШ) на входе радиоприемника поста контроля РЭО, см. например В.И. Тихонов «Статистическая радиотехника» - М.: «Советское радио», 1966 г., стр. 486, 493, 500: соответственно, аналитические выражения, отражающие зависимости дисперсии оценки параметров сигналов от отношения сигнал/шум (ОСШ) для амплитуды - формула (12.2.10), для частоты - (12.2.27) и графики нормированной среднеквадратической ошибки измерения смещения частоты от ОСШ на рис. 12.4. В настоящее время для сбора, передачи и обработки информации широко используются радиоэлектронные средства (РЭС) различного назначения со значительно отличающимися энергетическими характеристиками, поэтому ОСПШ на входе радиоприемника контроля РЭО может изменяться в широких пределах. Известно, см. например «Защита от радиопомех» под ред. М.В. Максимова - М.: Советское радио, 1976 г., стр. 131, 146, 147, что одним из методов повышения ОСПШ является использование пространственной селекции интересующих ИРИ, т.е. применение антенных систем (АС) с узкими главными лепестками диаграмм направленности (ДН). Однако реализация этого метода осложняет
проведение контроля РЭО в большой области пространства. Кроме того, часто оказываются неизвестными (или изменяющимися) пространственные характеристики ИРИ, что приводит к сложностям применения остронаправленных АС из-за необходимости их переориентирования или сканирования в заданном диапазоне пространственных параметров.
Антенные системы панорамных радиоприемников должны удовлетворять разнообразным, а порой и противоречивым требованиям. Важнейшими из них являются следующие:
ширина главного лепестка ДН антенны должна быть такой, чтобы обеспечить прием сигналов из всего заданного сектора пространства, как правило, достаточно большого. Контроль радиоэлектронной обстановки ведется, как правило, в азимутальном секторе Δα от 90° и более, в угломестном - до 90°;
главный лепесток ДН антенны для увеличения ОСПШ в интересах повышения точности измерения параметров сигналов должен быть по возможности узким.
Эти требования могут быть выполнены на основе использования методов пространственной обработки сигналов, реализуемых адаптивными антенными системами.
Известны адаптивные антенные системы (устройства) с возможностью управления шириной и положением главного лепестка диаграммы направленности антенны:
Адаптивное антенно-фидерное устройство, описанное в В.В. Юдин «Адаптивное антенно-фидерное устройство с управляемой шириной диаграммы направленности» - Антенны. 2002, №1 (56) с. 25-28, состоящее из последовательно соединенных генератора СВЧ сигнала, модулятора, оптического разветвителя, интегрально-оптических линий задержки, объединителя и модулей антенной решетки, а также гетеролазера, выход которого подключен ко второму входу модулятора, обеспечивает управление формой ДН и сканированием луча кольцевой АР, посредством переключения
фотодиодов за счет параллельной работы блоков временного смещения -работы схемы параллельного сканирования. При этом результирующая ДН является линейной композицией секторных, т.е. зависит от количества подключенных антенных элементов (АЭ). Недостатком этого устройства является то, что время коммутации таких систем может достигать единиц секунд, а возможности управления шириной главного лепестка и положением его максимумов зависят от количества АЭ и их характеристик направленности.
В антенной системе, описанной в Л.Д. Бахрах, Д.Ф. Зайцев «Системы сканирования фазированных антенных решеток на базе аналоговой фотоники» - Антенны. 2004, №2 (81), с. 3-15, состоящей из n - элементной кольцевой антенной решетки, к входам которой через корректирующие четырехполюсники подключены выходы блока n×n размерной матрицы Батлера, к входам которого, в свою очередь, подключены блоки дополнительных матриц Батлера, обеспечивающие формирование секторных диаграмм. В этой антенной системе с помощью блока матриц Батлера формируется система лучей, перекрывающая соответствующий подсектор, формирование диаграммы направленности с требуемыми показателями осуществляется за счет выбора параметров (установок) матриц Батлера. Сканирование ДН осуществляется за счет переключения оптических линий задержки. Данной устройство предназначено для исключения взаимных помех множества обслуживаемых корреспондентов в некотором секторе пространства, имеет сложную конструкцию, а управление положением главного лепестка ДН осуществляется только на основе априорной информации о местоположении источников радиоизлучения, то есть задача формирования главного лепестка ДН в направлении ИРИ, местоположение которого заранее неизвестно, не решается.
В адаптивной антенной системе (ААС), описанной в Р.А. Монзинго, Т.У. Миллер «Адаптивные антенные решетки. Введение в теорию». - М.: Радио и связь, 1986, с. 148, содержащей n антенных элементов, n линий
задержки, n сумматоров, последовательно соединенные генератор контрольного сигнала, блок определения разности, вспомогательный адаптивный процессор и ведомый процессор, первый выход которого является выходом ААС, причем выход генератора контрольного сигнала подключен к сигнальным входам всех линий задержки, выход каждой из которых подключен к первому входу соответствующего сумматора, выход каждого из которых подключен к соответствующему входу вспомогательного адаптивного процессора, корректирующий выход которого подключен к второму входу блока определения разности. Такая ААС обеспечивает управление шириной ДН и ориентированием главного лепестка ДН. Однако она имеет возможность формирования остронаправленного луча ДН в заданном направлении лишь при наличии априорной информации о местоположении ИРИ. Поэтому при использовании этой ААС в составе панорамного радиоприемника (ПРП) оценивание параметров обнаруженного сигнала с неизвестным местоположением может производиться только при широком главном лепестке ДНА АС.
Наиболее близкой к заявляемой является адаптивная антенная система (ААС), патент РФ на изобретение №2339132, содержащая n антенных элементов, n преселекторов, блок формирования диаграммы направленности, причем выход каждого из преселекторов соединен с соответствующим входом блока формирования диаграммы направленности, выход каждого антенного элемента соединен с первым входом соответствующего преселектора, а вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов, при этом (n+1)-й вход блока формирования диаграммы направленности является входом переключения режимов работы адаптивной антенной системы, (n+2)-й вход является входом начальной установки адаптивной антенной системы, (n+3)-й вход является входом кода частоты, а первый выход блока формирования диаграммы направленности является выходом адаптивной антенной системы.
Данная ААС обеспечивает управление шириной ДН и
ориентированием главного лепестка ДН. Однако эта система имеет возможность формирования лишь одного остронаправленного луча ДН в направлении одного обнаруженного ИРИ, в то время как в полосе пропускания преселектора может находиться несколько сигналов. При использовании этой ААС в составе панорамного радиоприемника (ПРП) при фиксированном времени настройки на частоту оценивание параметров может производиться только одного обнаруженного сигнала, а для оценивания параметров всех сигналов необходимо увеличивать время настройки на частоту. И в первом и во втором случае снижается пропускная способность панорамного радиоприемника.
Задача изобретения - повышение пропускной способности панорамного радиоприемника с адаптивной антенной системой за счет пространственной селекции нескольких сигналов, т.е. обеспечения возможности формирования нескольких (узких) остронаправленных лучей ДН ААС в направлении обнаруженных одновременно работающих ИРИ с произвольным местоположением в пределах заданного сектора пространства.
Для решения поставленной задачи в известную адаптивную антенную систему, содержащую n антенных элементов, n преселекторов, блок формирования диаграммы направленности, причем выход каждого из преселекторов соединен с соответствующим входом блока формирования диаграммы направленности, выход каждого антенного элемента соединен с первым входом соответствующего преселектора, а вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов, при этом (n+1)-й вход блока формирования диаграммы направленности является входом переключения режимов работы адаптивной антенной системы, (n+2)-й вход является входом начальной установки адаптивной антенной системы, (n+3)-й вход является входом кода частоты, а выход блока формирования диаграммы направленности является выходом адаптивной антенной системы введены (m-1) блоков формирования диаграммы направленности, первые выходы которых являются выходами адаптивной антенной системы, вторые
выходы соединены с соответствующими входами контроллера, каждый из выходов которого соединен с (n+4)-м входом соответствующего блока формирования диаграммы направленности, при этом выходы каждого из преселекторов соединены с соответствующими входами блоков формирования диаграммы направленности, (n+1)-е входы блоков формирования диаграммы направленности являются входами переключения режимов работы адаптивной антенной системы, (n+2)-е входы являются входами начальной установки адаптивной антенной системы, (n+3)-и входы являются входами кода частоты, а выходы блоков формирования диаграммы направленности являются выходами адаптивной антенной системы.
Введение в известную ААС дополнительных блоков формирования диаграммы направленности (общее число которых равно т) и соответствующих связей позволит повысить пропускную способность панорамного радио-приемника, в составе которого применяется ААС. Это достигается за счет пространственной селекции нескольких сигналов (путем формирования нескольких остронаправленных лучей ДН ААС в направлении обнаруженных одновременно работающих ИРИ с произвольным местоположением в пределах заданного сектора пространства), увеличения коэффициента усиления ААС в направлении каждого из обнаруженных ИРИ и, следовательно, повышения отношения сигнал/помеха + шум на выходе ААС при оценивании параметров сигналов. Число лучей диаграммы направленности определяется количеством блоков формирования диаграммы направленности и равно т.
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена.
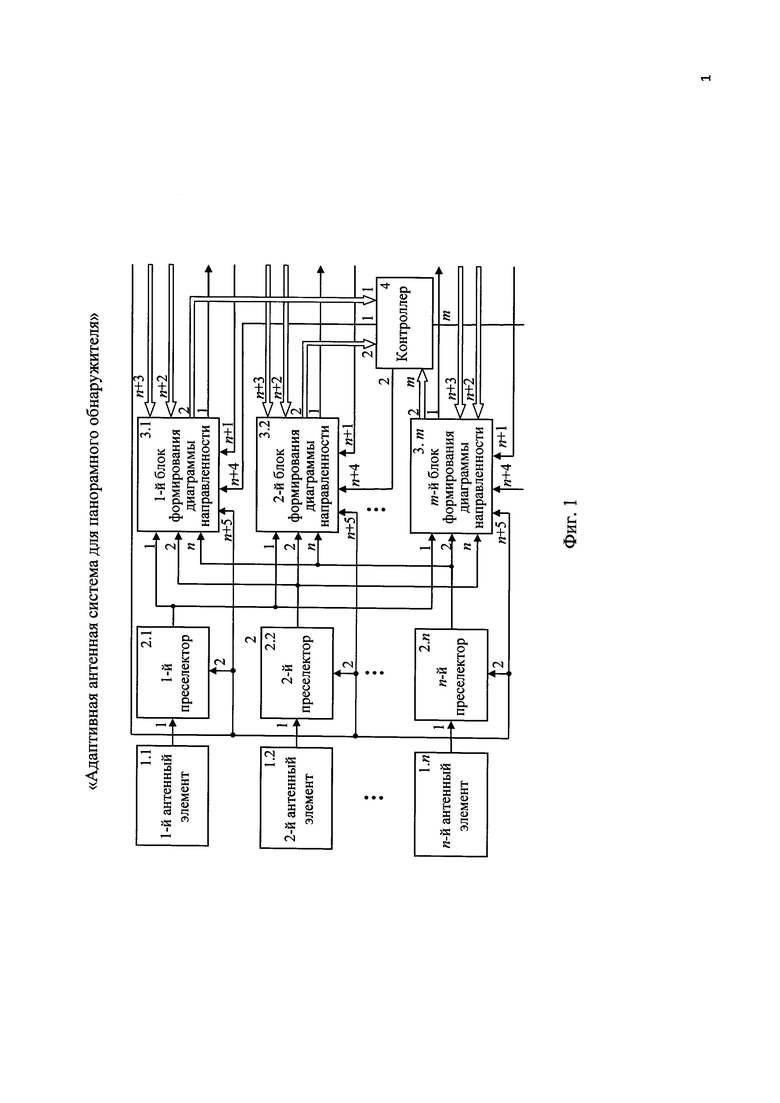
На фиг. 1 приведена структурная схема ААС для панорамного радиоприемника, на фиг. 2 - диаграммы направленности ААС в азимутальной плоскости, на фиг. 3 - структурная схема блока формирования диаграммы направленности, на фиг. 4 - структурная схема линии задержки, на фиг. 5 - структурная схема вспомогательного адаптивного процессора, на
фиг. 6 - структурная схема ведомого процессора, на фиг. 7 - структурная схема блока взвешенного сложения ведомого процессора, на фиг. 8 - структурная схема блока определения пространственных параметров сигналов, на фиг. 9 - структурная схема блока корреляционной матрицы сигнала (для упрощения рисунка при n=3), на фиг. 10 - структурная схема коррелятора, на фиг. 11 - структурная схема контроллера.
Заявляемая адаптивная антенная система для панорамного радиоприемника содержит антенные элементы 1.1…1. n, преселекторы 2.1…2. n, блоки формирования диаграммы направленности 3.1…3. m, контроллер 4, выходы которого подсоединены к (n+4)-м входам соответствующих блоков формирования диаграммы направленности 3, а к входам контроллера 4 подсоединены вторые выходы соответствующих блоков формирования диаграммы направленности 3, причем первый вход каждого из преселекторов 2 подключен к выходу соответствующего антенного элемента 1, вторые входы всех преселекторов 2 объединены и являются входом управления перестройкой преселекторов 2, а выход каждого из преселекторов 2 подключен к соответствующим входам каждого блока формирования диаграммы направленности 3, (n+1)-е входы блоков формирования диаграммы направленности 3 являются входами переключения режимов работы ААС, (n+2)-е входы блоков формирования диаграммы направленности 3 являются входами начальной установки ААС, (n+3)-е входы блоков формирования диаграммы направленности 3 являются входами кода частоты, (n+4)-е входы блоков формирования диаграммы направленности 3 являются управляющими входами, (n+5)-е входы всех блоков формирования диаграммы направленности 3 соединены с вторыми входами преселекторов, а первые выходы блоков формирования диаграммы направленности 3 являются выходами ААС.
На фиг. 2 приняты следующие обозначения:
α1…α4 - направления максимумов остронаправленных лучей ДН ААС в азимутальной плоскости;
Δα - ширина сектора контроля ДН ААС в азимутальной плоскости;
αири - направление максимума остронаправленного луча ДН ААС в азимутальной плоскости в направлении на обнаруженный ИРИ.
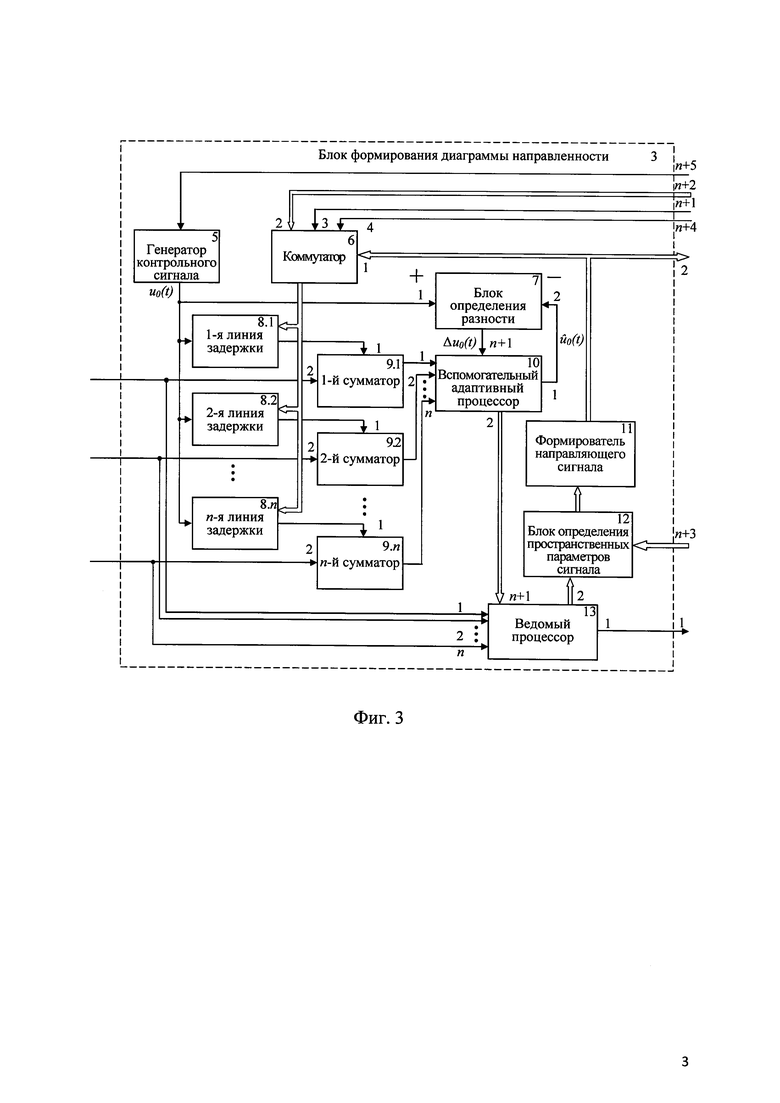
На фиг. 3 приняты следующие обозначения:
генератор контрольного сигнала 5;
коммутатор 6;
блок определения разности 7;
линии задержки 8.1…8.n;
сумматоры 9.1…9. n;
вспомогательный адаптивный процессор 10;
формирователь направляющего сигнала 11;
блок определения пространственных параметров сигнала 12;
ведомый процессор 13.
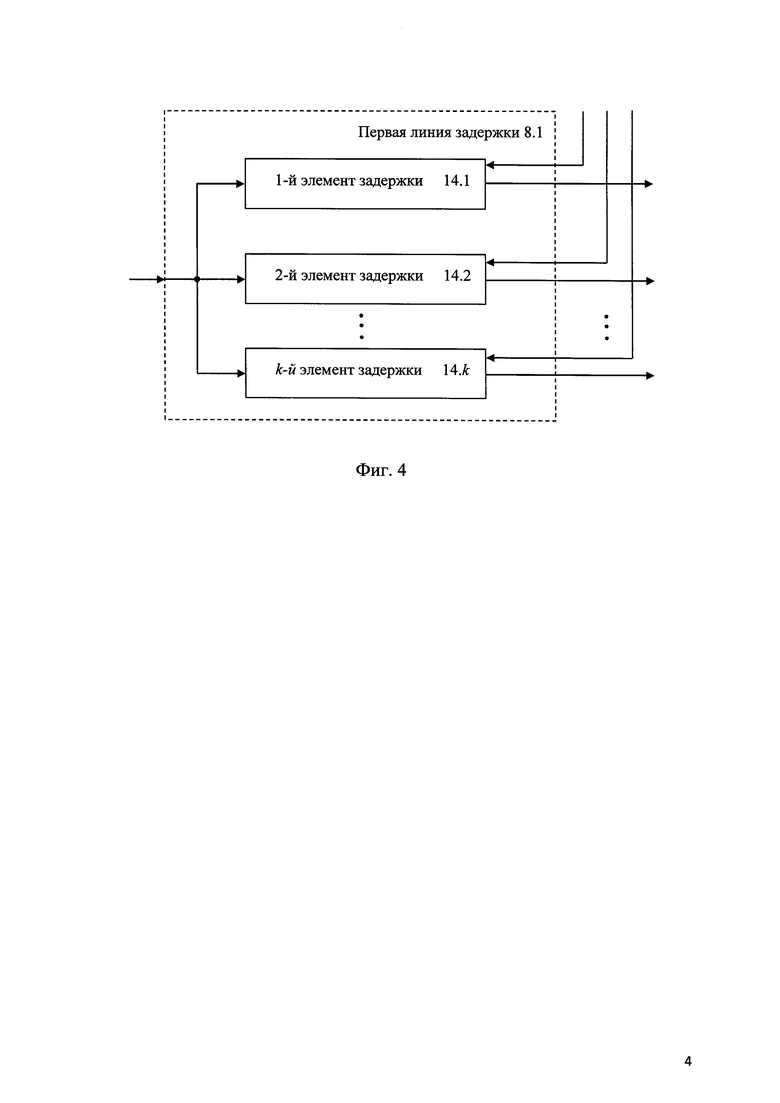
На фиг. 4 приняты следующие обозначения:
14.1…14. n - элементы задержки.
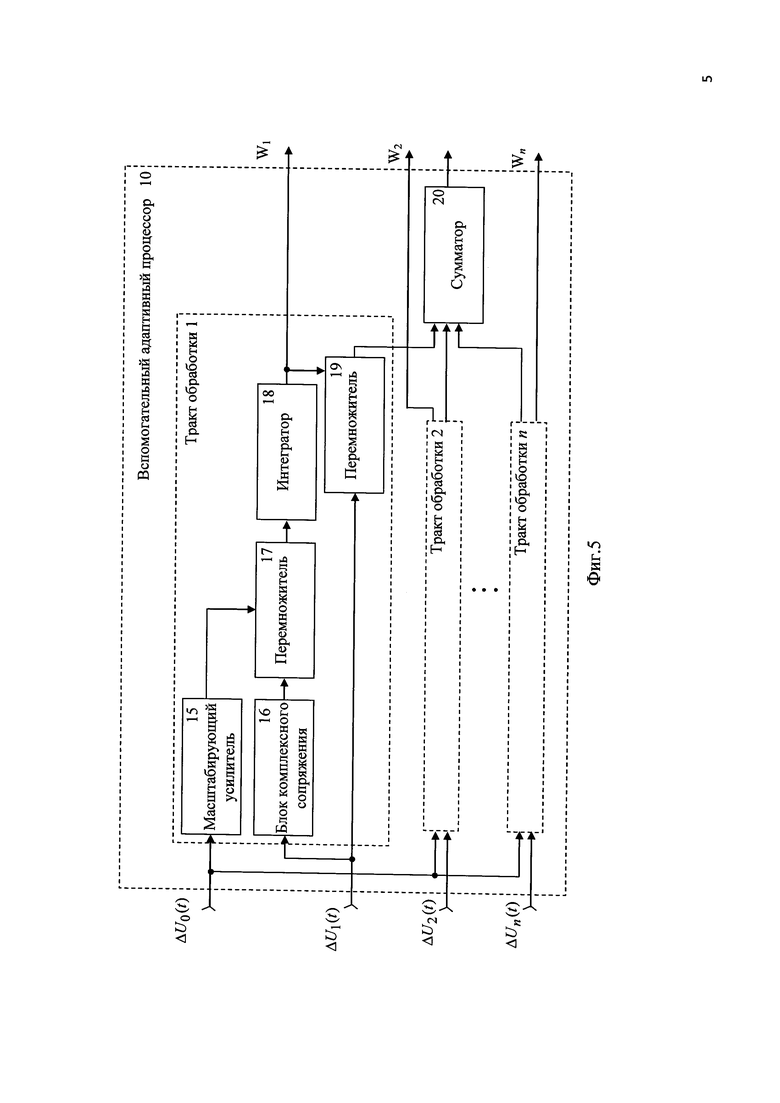
На фиг. 5 приняты следующие обозначения:
15 - масштабирующий усилитель;
16 - блок комплексного сопряжения;
17 - перемножитель;
18 - интегратор;
19 - перемножитель;
20 - сумматор.
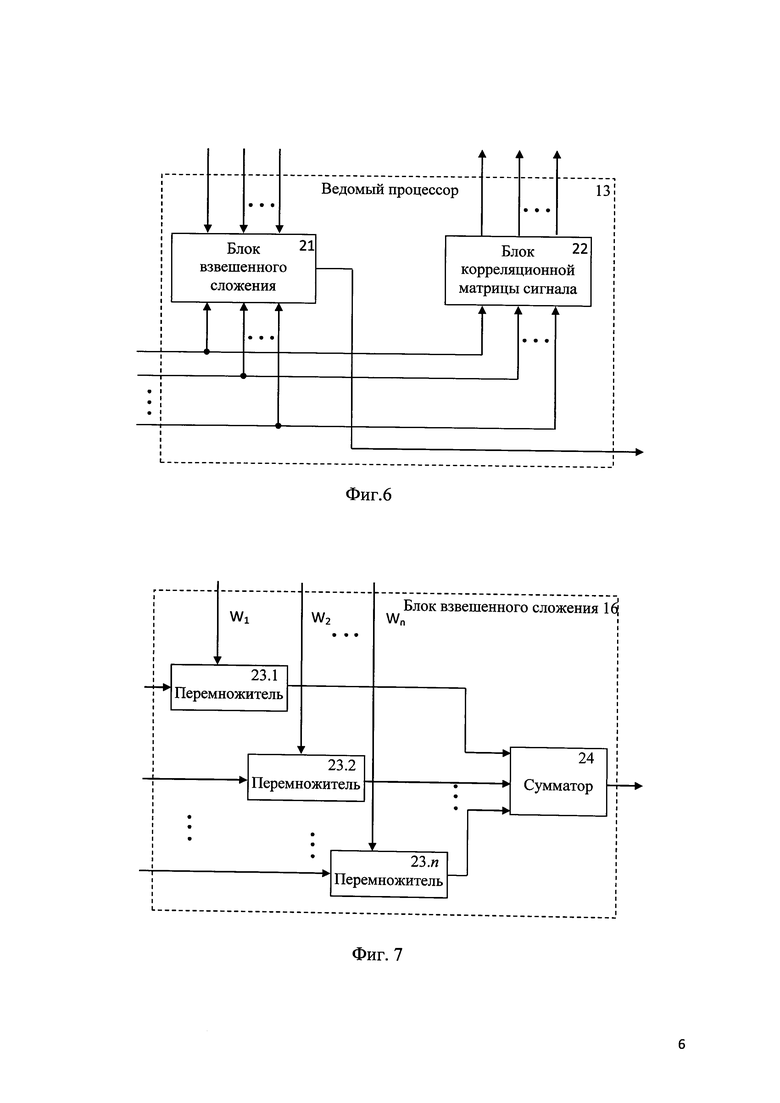
На фиг. 6 приняты следующие обозначения:
21 - блок взвешенного сложения;
22 - блок корреляционной матрицы сигнала (KMC).
На фиг. 7 приняты следующие обозначения:
23.1…23. n - перемножители;
24 - сумматор.
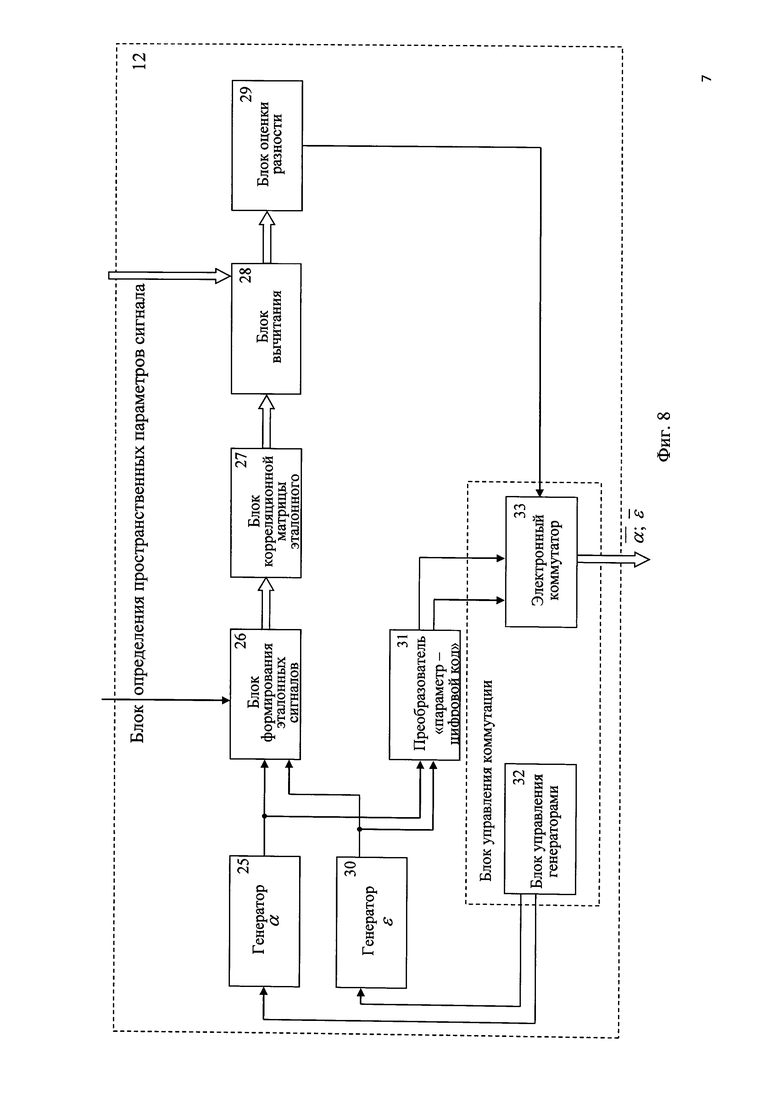
На фиг. 8 приняты следующие обозначения: 25;
30 - генераторы значений параметров;
26 - блок формирования эталонных сигналов;
27 - блок корреляционной матрицы эталонного сигнала;
28 - блок вычитания;
29 - блок оценки разности;
31 - преобразователь «параметр - цифровой код»;
32 - блок управления генераторами;
33 - электронный коммутатор.
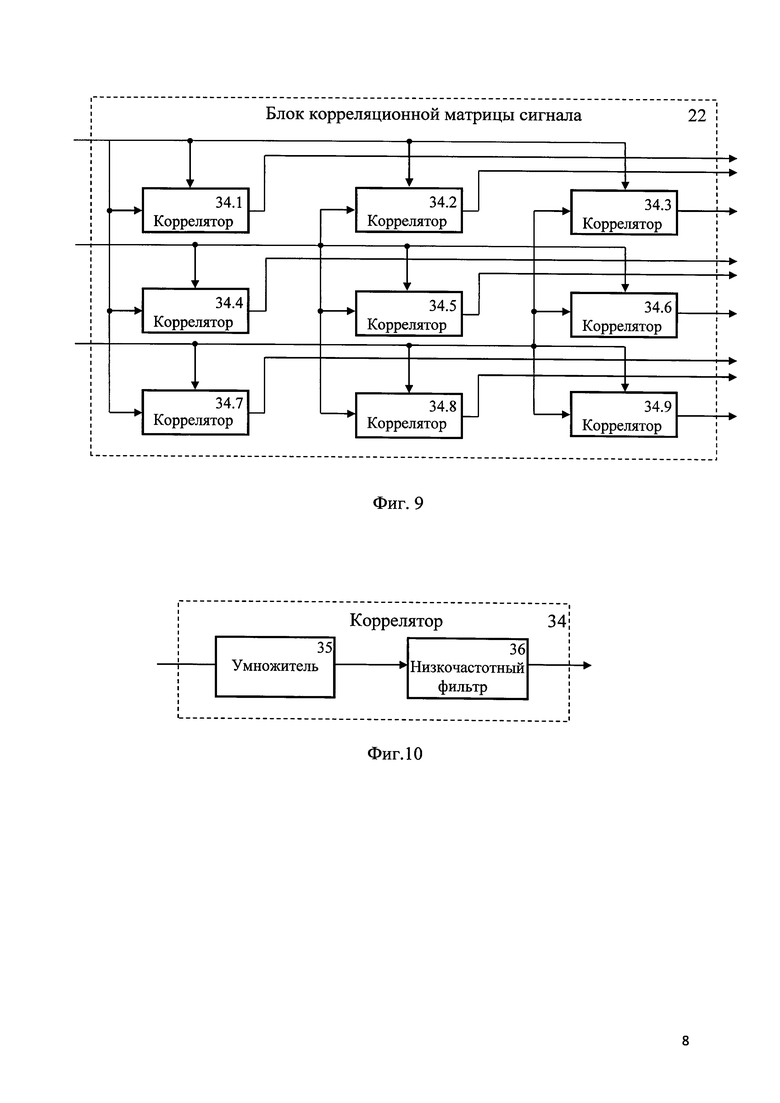
На фиг. 9 приняты следующие обозначения:
34.1 - 34.9 - корреляторы.
На фиг. 10 приняты следующие обозначения:
35 - умножитель;
36 - низкочастотный фильтр.
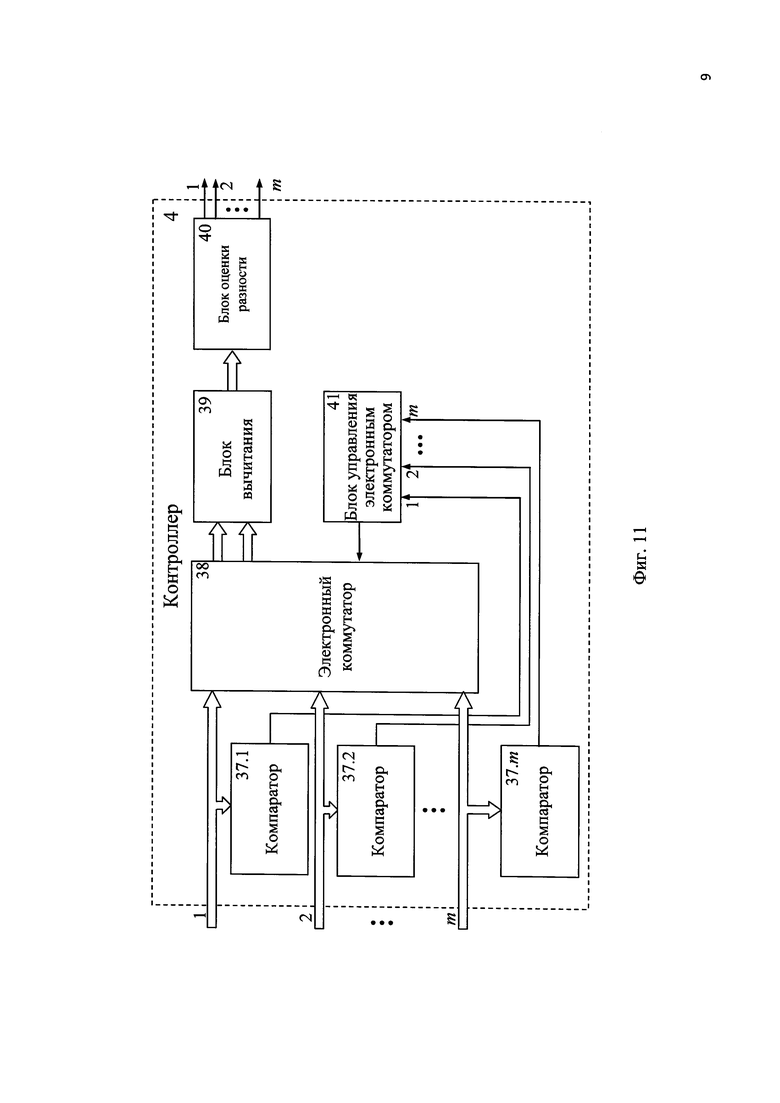
На фиг. 11 приняты следующие обозначения:
Блоки, используемые в заявляемой ААС, могут быть реализованы следующим образом.
Антенные элементы 1 представляют собой пассивные антенные элементы направленного действия.
Преселекторы 2 представляют собой полосовые фильтры с высокой избирательностью.
Блок формирования диаграммы направленности 3 может быть выполнен по схеме, приведенной на фиг. 3. Он содержит последовательно соединенные генератор контрольного сигнала 5, вход которого подключен ко вторым входу соответствующего преселектора 2 и является входом управления перестройкой генератора контрольного сигнала, а выход подключен к сигнальным входам всех линий задержки 8.1…8.n, выходы которых подключены к первым входам сумматоров 9.1…9. n. На вторые входы сумматоров 9.1…9. n подаются сигналы с выходов соответствующих преселекторов, а их выходы подключены к соответствующим входам вспомогательного процессора 10. Вспомогательный процессор 10 перестраивая весовые коэффициенты, формирует выходной сигнал, который
представляет собой оценку принимаемого сигнала  . Этот сигнал подается на второй вход блока определения разности 7, где он сравнивается с поступающим на первый вход сигналом от генератора контрольного сигнала 5. Разностный сигнал Δu0(t) с выхода блока определения разности 7 поступает на (n+1)-й вход вспомогательного процессора 10 и при равенстве разностного сигнала нулю сформированные вспомогательным процессором 10 весовые коэффициенты подаются на (n+1)-й вход ведомого процессора 13, который регулируя передаточные характеристики трактов, взвешивает поступающие на его первые n входов сигналы от соответствующих преселекторов, формируя диаграмму направленности ААС. Первый выход ведомого процессора 13 является выходом блока формирования диаграммы направленности 3, а второй подключен к блоку определения пространственных параметров сигнала 12, где вычисляются значения азимута и угла места сигнала, которые передаются на формирователь направляющего вектора сигнала 11. Сформированный направляющий вектор сигнала через коммутатор 6 поступает на вторые входы линий задержки 8.1…8. n, обеспечивая формирование узкого лепестка ДН в направлении источника обнаруженного сигнала. Коммутатор 6 обеспечивает переключение режимов работы, подключая ко вторым входам линий задержки 8.1…8. n поступающие на его второй вход сигналы начальной установки ААС (широкий лепесток ДН), или сформированный формирователем направляющего вектора сигнала 11 направляющий вектор сигнала (узкий лепесток ДН в направлении источника обнаруженного сигнала). Третий вход коммутатора 6 является входом переключения режимов работы адаптивной антенной системы, а четвертый - входом запрета переключения режимов работы в случае, когда поступающий на вход коммутатора направляющий вектор уже используется другим блоком формирования диаграммы направленности 3.
. Этот сигнал подается на второй вход блока определения разности 7, где он сравнивается с поступающим на первый вход сигналом от генератора контрольного сигнала 5. Разностный сигнал Δu0(t) с выхода блока определения разности 7 поступает на (n+1)-й вход вспомогательного процессора 10 и при равенстве разностного сигнала нулю сформированные вспомогательным процессором 10 весовые коэффициенты подаются на (n+1)-й вход ведомого процессора 13, который регулируя передаточные характеристики трактов, взвешивает поступающие на его первые n входов сигналы от соответствующих преселекторов, формируя диаграмму направленности ААС. Первый выход ведомого процессора 13 является выходом блока формирования диаграммы направленности 3, а второй подключен к блоку определения пространственных параметров сигнала 12, где вычисляются значения азимута и угла места сигнала, которые передаются на формирователь направляющего вектора сигнала 11. Сформированный направляющий вектор сигнала через коммутатор 6 поступает на вторые входы линий задержки 8.1…8. n, обеспечивая формирование узкого лепестка ДН в направлении источника обнаруженного сигнала. Коммутатор 6 обеспечивает переключение режимов работы, подключая ко вторым входам линий задержки 8.1…8. n поступающие на его второй вход сигналы начальной установки ААС (широкий лепесток ДН), или сформированный формирователем направляющего вектора сигнала 11 направляющий вектор сигнала (узкий лепесток ДН в направлении источника обнаруженного сигнала). Третий вход коммутатора 6 является входом переключения режимов работы адаптивной антенной системы, а четвертый - входом запрета переключения режимов работы в случае, когда поступающий на вход коммутатора направляющий вектор уже используется другим блоком формирования диаграммы направленности 3.
Контроллер 4 может быть выполнен по схеме, приведенной на фиг. 11. Он содержит компараторы 37.1…37.m, входы которых соединены с
соответствующими входами электронного коммутатора 38 и подключены к выходам соответствующих блоков формирования диаграммы направленности 3, а выходы подключены к блоку управления коммутатором 41; электронный коммутатор 38, управляемый блоком управления коммутатором 41; блока вычитания 39, к входам которого подключены выходы электронного коммутатора, а выход подключен к входу блока оценки разности 40, блок оценки разности 40, выходы которого подключены к (n+4)-м входам соответствующих блоков формирования диаграммы направленности 3.1…3m.
Компаратор представляет собой специализированный операционный усилитель с дифференциальным входом и одиночным или парофазным цифровым выходом. Вариант построения компаратора приведен на стр. 361 в Цифровые и аналоговые интегральные микросхемы: справочник / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С.В. Якубовского. - М.: Радио и связь, 1990. - 496 с. В табл. 5.9 на стр. 362, 363 представлены характеристики наиболее распространенных компараторов.
Электронный коммутатор 38 предназначен для осуществления управляемой передачи информации от входов контроллера 4 к входам блока вычитания 39. Промышленностью выпускается достаточно разнообразная номенклатура коммутаторов в виде интегральных микросхем. Характеристики наиболее широко используемых приведены на стр. 448-455 в справочнике Цифровые и аналоговые интегральные микросхемы. / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С.В. Якубовского. - М.: Радио и связь, 1990. - 496 с.
Блок вычитания 39 представляет собой набор функциональных узлов (количество которых определяется числом сигналов, составляющих вектор направляющего сигнала), и может быть реализован с использованием соответствующих дифференциальных усилителей, реализующих операции вычитания сигналов. Блок оценки разности 40 может быть реализован с использованием логических элементов. Блок управления электронным
коммутатором 41 может быть встроенным или выполнен с использованием логических элементов, обеспечивающих сравнение выходных уровней компараторов с установленным порогом и формирование управляющего сигнала на подключение пары соответствующих блоков формирования диаграммы направленности 3.1…3. m к входам блока вычитания 39.
Генератор контрольного сигнала 5 представляет собой электронный генератор синусоидального напряжения.
Коммутатор 6 представляет собой электронный коммутатор, подключающий один из двух входов (вход начальной установки или вход вектора направляющего сигнала) на выход коммутатора.
Блок определения разности 7 может быть реализован с использованием дифференциальных усилителей, реализующих операции вычитания сигналов.
Каждая линия задержки 8 представляет собой параллельно соединенные управляемые элементы задержки, которые могут быть реализованы на основе ультразвуковых управляемых линий задержки.
Сумматоры 9 могут быть реализованы с использованием дифференциальных усилителей, реализующих операции сложения сигналов.
Вспомогательный адаптивный процессор 10 может быть выполнен по структурной схеме, приведенной на фиг. 5. Он содержит n трактов обработки и сумматор 18. Каждый тракт обработки содержит масштабирующий усилитель 15, блок комплексного сопряжения 16, перемножители 17 и 19, интегратор 18.
Масштабирующий усилитель 15 вспомогательного адаптивного процессора 10 представляет собой электронный усилитель.
Блок комплексного сопряжения 16 каждого тракта обработки вспомогательного адаптивного процессора 10 формирует на своем выходе напряжение, комплексно сопряженное напряжению на его входе и может быть реализован с использованием полосно-задерживающих звеньев на основе Т-моста с усилителем напряжения или тока, см. например, «Справочник по теоретическим основам радиоэлектроники. Под ред. Б.Х.
Кривицкого в 2-х томах. Т. 2. М: Энергия, 1977.
Перемножители 17; 19, интегратор 18, сумматор 20 вспомогательного адаптивного процессора 10, перемножители 23, сумматор 24 блока взвешенного сложения 21 ведомого процессора 13 могут быть реализованы с использованием дифференциальных усилителей, реализующих соответствующие операции над сигналами. Варианты построения и основные характеристики перемножителей приведены на стр. 368-370 в Цифровые и аналоговые интегральные микросхемы: справочник / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова и др.; Под ред. С. В. Якубовского. - М.: Радио и связь, 1990. - 496 с.
Формирователь направляющего сигнала 11 предназначен для преобразования l-элементного двоичног кода на входе в k- элементный двоичный код на его выходе. Может быть создан на базе многофункциональных элементов цифровых структур, описанных на стр. 264 в Зельдин Е.А. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. - Л.: Энергоатомиздат, 1986. - 280 с.
Блок определения пространственных параметров сигналов 12 может быть выполнен по структурной схеме, приведенной на фиг. 8. Он содержит последовательно соединенные блок формирования эталонных сигналов 26, блок корреляционной матрицы эталонного сигнала 27, блок вычитания 28, блок оценки разности 29, электронный коммутатор 35, а также блок управления генераторами 32, генераторы значений параметров 25 и 30, входы которых соединены с соответствующими выходами блока управления генераторами 32, преобразователь «параметр - цифровой код» 31, входы которого соединены с соответствующими входами блока формирования эталонных сигналов 26 и выходами соответствующих генераторов значений параметров 25 и 30, а выходы соединены с соответствующими входами электронного коммутатора 33.
Ведомый процессор 13 может быть выполнен по схеме, представленной на фиг. 6. Он содержит блок взвешенного сложения 21 и
блок корреляционной матрицы сигнала 22.
Блок взвешенного сложения 21 может быть выполнен по схеме представленной на фиг. 7.
Блок корреляционной матрицы сигнала 22 ведомого процессора 13 представляет собой (n×n) корреляторов, выходные сигналы которых характеризуют корреляционную связь между сигналами в соответствующих антенных элементах, и может быть реализован по схеме, приведенной на фиг. 9. Входящие в состав блока KMC 22 корреляторы 34.1…34.9 широко используются в устройствах обработки сигналов многоканальных АС, например Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и связь, 1983, с. 235 рис. 10.10, с. 240, рис. 10.16, Венскаускас К.К. Компенсация помех в судовых радиотехнических системах. - Л.: Судостроение, 1989, с. 111, рис. 2.31 и могут быть реализованы по схеме, фиг. 10 в виде последовательно соединенных умножителя 35 и низкочастотного фильтра 36.
Таким образом, реализация предложенного устройства не вызывает сомнений, так как для его изготовления используются типовые радиотехнические устройства и элементы цифровой техники.
Заявляемая ААС предназначена для работы совместно с панорамным радиоприемником, осуществляющим последовательно-параллельный обзор заданного частотного диапазона.
Для достижения необходимого качества оценивания параметров обнаруживаемых сигналов ААС в процессе функционирования имеет возможность последовательного автоматического формирования двух ДН: широкой - при контроле РЭО (наблюдении и обнаружении сигналов в заданном секторе) и нескольких узких - при оценивании их параметров. Число узких ДН определяется количеством формирователей ДН.
В процессе работы ААС по командам ПРП осуществляется последовательная пошаговая перестройка одновременно всех преселекторов 2 от нижней до верхней границ заданного частотного диапазона в
соответствии с сеткой частот ПРП. При этом на каждом шаге при широкой ДНА ААС сначала осуществляется проверка наличия сигнала в полосе обзора, определяемой полосой пропускания преселектора 2 (в общем случае она может быть регулируемой для согласования с шириной спектра определенного класса сигналов). При появлении сигнала в полосе обзора он принимается антенными элементами (АЭ) 1 и через преселекторы 2, блоки формирования ДН 3 поступает на ПРП, где производится его энергетическое обнаружение, после чего по команде с ПРП один из блоков формирования ДН 3 ААС автоматически формирует узкую ДН в направлении на источник сигнала и далее ПРП производит оценивание параметров сигнала. Если в полосе преселекторов 2 находится несколько сигналов, то обнаруживается каждый из них, и по команде с ПРП другие блоки формирования ДН 3 ААС автоматически формируют узкие ДН в направлении на источники сигналов. Контроллер 4 предотвращает возможность использования одного направляющего вектора в нескольких блоках формирования ДН 3.
Диаграмма направленности ААС формируется следующим образом: С генератора контрольного сигнала 1 на сигнальные входы всех элементов задержки (ЭЗ) 14 всех линий задержки (ЛЗ) 8 подается синусоидальный сигнал. Каждая ЛЗ 8 представляет собой параллельно соединенные управляемые элементы задержки 14 (на фиг. 4 показана одна из них).
В работе ААС можно выделить два режима: контроля и оценивания.
Режим контроля начинается после каждой перестройки преселекторов 2 на очередную частоту (полосу обзора) заданного частотного диапазона, при этом коммутатор 6 по команде от ПРП устанавливается в такое положение, при котором на управляющие входы всех элементов задержки 14 всех ЛЗ 8 через коммутатор 6 подаются команды начальной установки, определяющие величину задержки каждого элемента задержки 14 каждой ЛЗ 8, обеспечивая управление шириной (Δα, Δε) и положением максимума главного лепестка широкой ДН. Для обеспечения возможности изменения ширины ДН
величины задержки каждого элемента задержки 14 при начальной установке задаются таким образом, чтобы на выходах соответствующих элементов задержки 14 всех линий задержки 8 формировались совокупности сигналов, соответствующие плоским волнам, пришедшим с различных направлений. Например, совокупность сигналов с выходов элементов задержки ЭЗ1ЛЗ1, ЭЗ1ЛЗ2, …, ЭЗ1ЛЗn соответствует плоской волне, пришедшей с первого направления (α1, ε1), совокупность сигналов с выходов элементов задержки ЭЗ2ЛЗ1, ЭЗ2ЛЗ2, …, ЭЗ2ЛЗn соответствует плоской волне, пришедшей со второго направления (α2, ε2) и т.д. Количество ЭЗ 14 (k) в каждой ЛЗ 8 (фиг. 4) определяет число возможных направлений, в которых ААС может сформировать максимумы ДН. На фиг. 2 в качестве примера иллюстрируется получение широкой результирующей ДН в азимутальной плоскости за счет формирования лучей в четырех направлениях. Управляя положениями максимумов каждого луча (α1, ε1; α2, ε2; α3, ε3; α4, ε4), можно обеспечить требуемую ширину ДН.
Вспомогательный адаптивный процессор 10 (фиг. 5) представляет собой многоканальное (по числу антенных элементов) устройство, которое оценивает различия параметров сигналов, воздействующих на его сигнальные входы и после их преобразования формирует управляющие напряжения, называемые весовыми коэффициентами, таким образом, чтобы разность Δu0(t) между контрольным сигналом u0(t) и его оценкой  на выходе вспомогательного адаптивного процессора 10 была минимальной для минимизации ошибки воспроизведения контрольного сигнала, а, следовательно, и всех сигналов, приходящих с направлений, определяемых начальной установкой.
на выходе вспомогательного адаптивного процессора 10 была минимальной для минимизации ошибки воспроизведения контрольного сигнала, а, следовательно, и всех сигналов, приходящих с направлений, определяемых начальной установкой.
Таким образом, основным назначением вспомогательного адаптивного процессора 10 является выработка управляющих напряжений (весовых коэффициентов), соответствующих совокупности сигналов на его сигнальных входах и обеспечивающих формирование ДН ААС требуемой формы с заданным положением главного лепестка. Эту же функцию
выполняют процессоры, широко используемые в ААС различного назначения, см. например Р.А. Монзинго, Т.У. Миллер «Адаптивные антенные решетки. Введение в теорию». - М.: Радио и связь, 1986, с. 97, рис. 3.7, с. 106, рис. 3.9, с. 231, рис. 5.26, с. 304, рис. 8.11, Ямпольский В.Г., Фролов О.П. Антенны и ЭМС.- М.: Радио и связь, 1983, с. 236 рис. 10.11, Венскаускас К.К. Компенсация помех в судовых радиотехнических системах. - Л.: Судостроение, 1989, с. 72, рис. 2.15, с. 115, рис. 2.34, с. 125, рис. 3.2, Адаптивная компенсация помех в каналах связи / Ю.И. Лосев, А.Г. Бердников, Э.Ш. Гойхман, Б.Д. Сизов / под. ред. Ю.И. Лосева. - М.: Радио и связь, 1988, с. 22, рис. 1.8, с. 35, рис. 1.14, с. 39, рис. 1.17.
Масштабирующий усилитель 15 каждого тракта обработки вспомогательного адаптивного процессора 10 обеспечивает необходимый уровень выходного напряжения блока определения разности 7 на входе перемножителя 17. Параметры масштабирующего усилителя определяют размер интервала адаптации.
Блок комплексного сопряжения 16 каждого тракта обработки вспомогательного адаптивного процессора 10 формирует на своем выходе напряжение, комплексно сопряженное напряжению на его входе.
Сформированные во вспомогательном адаптивном процессоре 10 управляющие напряжения (весовые коэффициенты) подаются на ведомый процессор 13 (фиг. 6) и определяют комплексные коэффициенты передачи в каждом канале блока взвешенного сложения 21 ведомого процессора 13. В результате взвешенного сложения сигналов в ведомом процессоре 13 максимальную результирующую амплитуду будут иметь те сигналы, которые приходят с направлений, определенных начальной установкой. Для сигналов, приходящих с других направлений, напряжения сигналов каждого из каналов в блоке взвешенного сложения 21 будут взаимокомпенсироваться, и их сумма будет минимальной. Таким образом, в режиме контроля ведомый процессор 13 выполняет роль пространственного фильтра, пропускающего на вход ПРП сигналы, приходящие с направлений, определенных начальной
установкой, фиг. 2.
Режим оценивания начинается с момента энергетического обнаружения сигнала панорамным радиоприемником. При этом в блоке определения пространственных параметров сигнала 12 каждого из задействованных блоков формирования диаграммы направленности 3 определяется направление прихода (азимута и угла места) обнаруженного сигнала, а ПРП выдает на коммутатор 6 команду, по которой он подключает выход формирователя направляющего сигнала 11 к входам всех элементов задержки 14 всех линий задержки 8.
В заявляемом устройстве для определения пространственных параметров сигнала используется корреляционный метод, реализующий алгоритм пространственной обработки сигналов: наведенные в каждом антенном элементе 1 ААС напряжения подвергаются корреляционной обработке.
Результаты корреляционной обработки выходных сигналов многоэлементных антенных систем удобно представлять в виде корреляционной матрицы (КМ) сигналов. Известно, что корреляционная матрица сигналов содержит полную информацию о внешних источниках, воздействующих на антенную систему. Диагональные элементы КМ дают информацию о мощности собственных и внешних шумов в парциальных каналах приема, остальные элементы КМ содержат информацию о направлениях прихода сигналов, см. например Ямпольский В.Г., Фролов О.П. Антенны и ЭМС. - М.: Радио и связь, 1983, стр. 227.
Для извлечения информации, заложенной в набеге (сдвиге) фазы сигнала на выходах антенных элементов 1, в блоке корреляционной матрицы сигнала (KMC) 22 ведомого процессора 13 (фиг. 6; 10) формируется корреляционная матрица сигналов, диагональные элементы которой являются функциями автокорреляции, а остальные элементы - функциями взаимной корреляции сигналов в соответствующих АЭ 1.
Для получения элементов КМ в блоке KMC 22 ведомого процессора 13 (фиг. 9) производится перемножение и низкочастотная фильтрация выходного напряжения каждого АЭ 1 с выходными напряжениями всех остальных АЭ 1. Корреляторы 34 в блоке KMC 22 идентичны.
Таким образом, в результате корреляционной обработки напряжений с выходов антенных элементов 1 формируются сигналы (являющиеся элементами KMC), фазы которых содержат информацию об азимуте α и угле места ε сигнала (волны, падающей на антенные элементы 1 ААС).
Определение параметров сигнала α и ε в блоке определения пространственных параметров сигнала 12 (фиг. 8) каждого блока формирования диаграммы направленности 3 осуществляется следующим образом. Блок управления генераторами 32 для заданных (установленных пользователем) границ поиска по азимуту αmin, αmax и углу места εmin, εmax и соответствующих значений разрешения по азимуту и углу места Δα, Δε управляет соответствующими генераторами 25 и 30, формирующими множество вариантов сочетаний напряжений, пропорциональных соответственно значениям азимута и угла места (в град.). В блоке формирования эталонных сигналов 26 имитируются сигналы с антенных элементов 1 ААС для текущих сочетаний значений а; е. Блок корреляционной матрицы эталонного сигнала 27 в блоке определения пространственных параметров сигнала 12, идентичен блоку KMC 22 ведомого процессора 13 и выполняет те же функции. В блоке оценки разности 29 определяется точность совпадения корреляционной матрицы принимаемого ААС сигнала и корреляционной матрицы сформированных копий (эталонных сигналов) по заданному пороговому значению. При отсутствии сигнала на входе блока определения пространственных параметров сигнала 12, значение напряжения выходного сигнала блока оценки разности 29 равно нулю. Если разность корреляционных матриц сигналов на выходе блока вычитания 28 не превышает порогового значения
(т.е. эталонный сигнал максимально совпал с сигналом на выходе блока KMC 22 ведомого процессора 13 и параметры которого надо определить), то на выходе блока оценки разности 29 появляется сигнал высокого уровня (логическая единица). Этот сигнал открывает электронный коммутатор 33. При этом сигналы с выходов генераторов значений параметров α; ε 25 и 30, присутствующие на входе электронного коммутатора 33 в виде кода азимута и угла места (в результате аналогово-цифрового преобразования в преобразователе «параметр - цифровой код» 31) поступают на выход блока определения пространственных параметров сигнала 12 каждого блока формирования диаграммы направленности 3. После завершения оценивания параметров сигналов логическая единица с входа коммутатора снимается и в блоках формирования диаграммы направленности 3 вновь формируется широкая диаграмма направленности.
Таким же образом (путем формирования множества эталонных сигналов и сравнения каждого из них с принятым многоэлементной антенной системой сигналом корреляционным методом) определяются пространственные параметры сигналов в малобазовом интерферометре, см. Германия, патент DE 4128191 A1, 1993, МПК 7 G01S 3/46.
Формирователь направляющего сигнала 11 (представляющий собой кодопреобразователь) каждого блока формирования диаграммы направленности 3, ставит в соответствие величинам азимута α и угла места β величины задержек контрольного сигнала в каждом элементе 14 каждой ЛЗ 8 таким образом, чтобы совокупность сигналов на выходе ЛЗ 8 соответствовала плоской волне, приходящей с направления обнаруженного сигнала. Таким образом, направляющий сигнал представляет собой совокупность управляющих напряжений в виде цифровых кодов для всех элементов 14 всех линий задержки 8. Вспомогательный адаптивный процессор 10 каждого блока формирования диаграммы направленности 3 формирует новые весовые коэффициенты, которые подаются на ведомый процессор 13 каждого блока формирования диаграммы направленности 3.
Коэффициенты передачи в каналах ведомого процессора 13 каждого блока формирования диаграммы направленности 3 устанавливаются таким образом, чтобы результат взвешенного сложения был максимальным для сигналов, приходящих с направления обнаруженного ИРИ, а напряжения сигналов с других направлений взаимокомпенсировались при сложении.
Сформированные формирователем направляющего сигнала каждого задействованного блока формирования диаграммы направленности 3 векторы подаются на соответствующие входы контроллера 4 для сравнения. Сравнение уровней элементов направляющего сигнала производится в блоке вычитания 39 контроллера 4, на который эти элементы подаются через компараторы 37.1…37.m. Компараторы 37 определяют, в каких блоках формирования диаграммы направленности 3 сформированы направляющие векторы и формируют сигналы в блок управления электронным коммутатором 41 для поочередного попарного подключения векторов направляющего сигнала к блоку вычитания 39. В случае равенства уровней соответствующих элементов вектора направляющих сигналов на выходах блока вычитания 38 сигналы отсутствуют и на его выходе имеется напряжение низкого уровня (логический ноль), при котором формируется сигнал в один из блоков формирования диаграммы направленности 3, запрещающий формирование узкого луча ДН.
Таким образом, заявляемая адаптивная антенная система в режиме оценивания обеспечивает формирование нескольких (до m) узконаправленных лучей диаграммы направленности в направлении нескольких одновременно работающих ИРИ с произвольным местоположением за счет того, что ведомый процессор 13 каждого блока формирования диаграммы направленности 3 выполняет роль пространственного фильтра, пропускающего на вход ПРП сигналы, приходящие с направления обнаруженного ИРИ в узком луче сформированной ДНА АС (на фиг. 2. с направления αири). Так как обнаружение сигналов в режиме контроля в соответствии с начальной
установкой производится в пределах заданного сектора, то и узкий луч ДНА в каждом блоке формирования диаграммы направленности 3 в режиме оценивания формируется в пределах этого сектора, поскольку за его пределами сигналы не обнаруживаются.
Применение заявляемого устройства позволит повысить пропускную способность панорамного радиоприемника, в составе которого применяется ААС за счет обеспечения возможности формирования нескольких остронаправленных лучей ДН ААС в направлении обнаруженных ИРИ с произвольным местоположением в пределах заданного сектора пространства, увеличения коэффициента усиления ААС и, следовательно, повышения отношения сигнал/помеха + шум на выходе каждого блока формирования диаграммы направленности 3 при оценивании параметров сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2005 |
|
RU2291458C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2007 |
|
RU2339132C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2005 |
|
RU2292650C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| АДАПТИВНАЯ ПРИЕМНАЯ АНТЕННАЯ СИСТЕМА СДВ-КВ ДИАПАЗОНА НА ОСНОВЕ ТЕХНОЛОГИИ SDR | 2021 |
|
RU2783989C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2012 |
|
RU2497285C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2010 |
|
RU2451373C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2066925C1 |

Изобретение относится к области радиотехники, в частности к области антенной техники, и может использоваться в составе панорамных радиоприемных устройств при контроле радиоэлектронной обстановки и оценке параметров сигналов источников радиоизлучений. Антенная система содержит n антенных элементов, n преселекторов, m блоков формирования диаграммы направленности. Причем выходы каждого из преселекторов соединены с соответствующими входами блока формирования диаграммы направленности. Выход каждого антенного элемента соединен с первым входом соответствующего преселектора, а вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов. При этом (n+1)-е входы блоков формирования диаграммы направленности являются входами переключения режимов работы адаптивной антенной системы, (n+2)-е входы являются входами начальной установки адаптивной антенной системы, (n+3)-и входы являются входами кода частоты, а первые выходы блоков формирования диаграммы направленности являются выходами адаптивной антенной системы. Входы контроллера соединены с вторыми выходами соответствующих блоков формирования диаграммы направленности. Каждый из выходов контроллера соединен с (m+4)-м входом соответствующего блока формирования диаграммы направленности, (n+5)-е входы блоков формирования диаграммы направленности соединены с вторыми входами преселекторов. Технический результат заключается в повышении пропускной способности панорамного радиоприемника, в увеличении коэффициента усиления ААС и в повышении отношения сигнал / помеха + шум на выходе каждого блока формирования диаграммы направленности при оценивании параметров сигналов. 11 ил.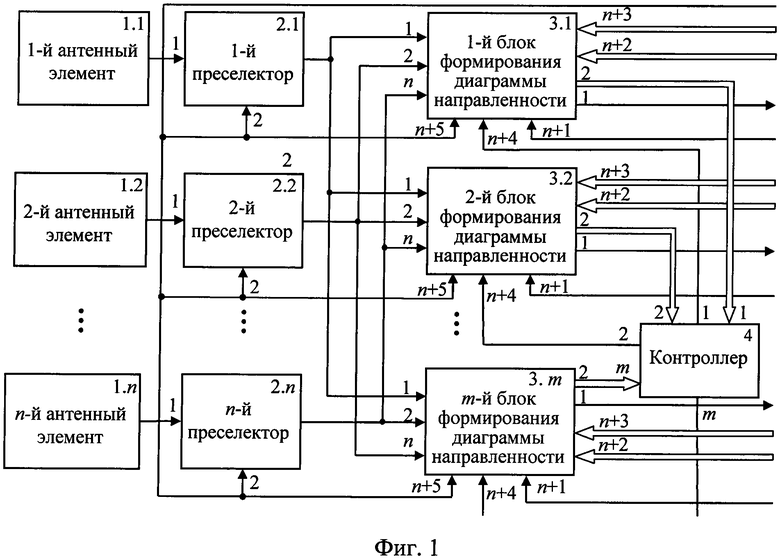
Адаптивная антенная система для панорамного радиоприемника, содержащая n антенных элементов, n преселекторов, блок формирования диаграммы направленности, причем выход каждого из преселекторов соединен с соответствующим входом блока формирования диаграммы направленности, выход каждого антенного элемента соединен с первым входом соответствующего преселектора, а вторые входы всех преселекторов объединены и являются входом управления перестройкой преселекторов, при этом (n+1)-й вход блока формирования диаграммы направленности является входом переключения режимов работы адаптивной антенной системы, (n+2)-й вход является входом начальной установки адаптивной антенной системы, (n+3)-й вход является входом кода частоты, а первый выход блока формирования диаграммы направленности является выходом адаптивной антенной системы, отличающийся тем, что в нее введены контроллер, (m-1) блоков формирования диаграммы направленности, первые выходы которых являются выходами адаптивной антенной системы, вторые выходы соединены с соответствующими входами контроллера, каждый из выходов которого соединен с (n+4)-м входом соответствующего блока формирования диаграммы направленности, при этом выходы каждого из преселекторов соединены с соответствующими входами блоков формирования диаграммы направленности, (n+1)-е входы блоков формирования диаграммы направленности являются входами переключения режимов работы адаптивной антенной системы, (n+2)-е входы являются входами начальной установки адаптивной антенной системы, (n+3)-и входы являются входами кода частоты, (n+5)-е входы соединены с вторыми входами преселекторов, а первые выходы блоков формирования диаграммы направленности являются выходами адаптивной антенной системы.
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2007 |
|
RU2339132C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2005 |
|
RU2291458C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1995 |
|
RU2099837C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1980 |
|
SU957713A1 |

