УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству формирования изображения и способу управления для него, а более точно, к устройству формирования изображения, которое является пригодным для копировального аппарата, лазерного принтера и факса и предназначено для облучения электростатического носителя модулированным лазерным пучком из источника лазерного излучения для формирования на его поверхности информации в виде изображений, которая содержит, например, электростатические латентные изображения, и способу управления для него.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Традиционно для формирования изображения такое устройство формирования изображения инициирует электродвигатель для поворота многогранного зеркала и определяет положение сканирования лазерного луча, отраженного этим многогранным зеркалом, для определения начального положения сканирования в главном направлении сканирования. То есть для выявления положения сканирования лазерного луча датчик детектирования лазерного луча (в дальнейшем указываемый ссылкой как BD-датчик) расположен в зоне вне изображения. BD-датчик освещается лазерным лучом для вывода сигнала детектирования лазерного луча (в дальнейшем указываемого ссылкой как BD-сигнала). Устройство определяет позицию начала записи изображения на основе результирующего BD-сигнала, таким образом формируя изображение. Лазерный луч, необходимый для получения BD-сигнала во время формирования изображения, испускается при стабильном времени цикла, потому что многогранное зеркало устойчиво поворачивается во время формирования изображения. Поэтому распространенная практика состоит в том, чтобы испускать лазерный луч в зоне вне изображения на стадии, предшествующей времени цикла, в течение которого ожидается, что должен быть получен BD-сигнал.
В качестве средства отклонения для отклонения светового луча от источника света предлагается гальваностереотипное зеркало, которое раскачивает вызывающую отклонение поверхность отражения. В последние годы также предложено так называемое микрозекрало, которое выполняет синусоидальное колебание посредством резонансной конструкции с использованием микромеханической технологии. Ожидается, что эти предложения должны уменьшить размеры оптических сканирующих устройств и значительно снизят образование полос вследствие вибрации, повышение температуры, шумы и потребляемую мощность.
Более того, при оптическом сканировании для выполнения возвратно-поступательного сканирования многолучевого типа выложенная заявка № 2002-311358 на патент Японии делает возможным устранение перекрытия линий сканирования и снижение колебания высоты изображения между интервалами линий сканирования на поверхности фоточувствительного элемента.
Лазерное возвратно-поступательное сканирование с использованием подвижного зеркала ставит следующую проблему. Вообще, линия сканирования, записанная на электростатической поверхности в направлении основного сканирования при повороте фоточувствительного элемента, отклоняется в направлении вспомогательного сканирования, хотя величина этого очень мала. Скорость вращения фоточувствительного элемента гораздо ниже, чем скорость основного сканирования, поэтому отклонение линии сканирования становится весьма небольшим. Однако при осуществлении возвратно-поступательного сканирования отклонение линии сканирования изменяется на противоположное при каждом сканировании. Это означает, что линии сканирования записываются на поверхности фоточувствительного элемента зигзагообразно. То есть происходит колебание высоты изображения между интервалами линий сканирования, при котором интервал линии сканирования, записанной на поверхности фоточувствительного элемента, изменяется в зависимости от высоты изображения в световом пятне, имеющее следствием неравномерную плотность или ухудшение в разрешении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения заключается в обеспечении устройства формирования изображения, которое предотвращает какую бы то ни было неравномерную плотность и ухудшение в разрешении при возвратно-поступательном лазерном сканировании с использованием подвижного зеркала.
Для решения вышеприведенной проблемы, согласно настоящему изобретению предусмотрено устройство формирования изображения, которое формирует изображение на фоточувствительном элементе посредством сканирования фоточувствительного элемента лазерным лучом, отражаемым подвижным зеркалом, с помощью возвратно-поступательного движения подвижного зеркала, угол поворота которого является изменяемым в соответствии с электрическим сигналом, содержащее средство детектирования направления вращения для выявления направления вращения подвижного зеркала и средство коррекции изображения для взвешивания, на основе направления поворота (против часовой стрелки)/(по часовой стрелке), выявленного средством детектирования направления вращения, данных изображения двух линий вдоль направления вспомогательного сканирования в соответствии с протяженностью сканирования после начала лазерного сканирования, чтобы линия сканирования лазера компенсировала изображение, которое должно быть сформировано с использованием подвижного зеркала.
Согласно настоящему изобретению предоставлен способ управления устройством формирования изображения, которое формирует изображение на фоточувствительном элементе посредством сканирования фоточувствительного элемента лазерным лучом, отражаемым подвижным зеркалом, с помощью возвратно-поступательного движения подвижного зеркала, угол поворота которого является изменяемым в соответствии с электрическим сигналом, содержащий этапы вычисления весового коэффициента, требуемого для взвешивания данных изображения каждой линии в направлении вспомогательного сканирования на основе скорости поворота подвижного зеркала, направления поворота подвижного зеркала и истекшего времени, измеренного таймером; и корректировки, посредством весового коэффициента, изображения, которое должно быть сформировано с использованием подвижного зеркала.
Как описано выше, согласно настоящему изобретению, при лазерном возвратно-поступательном сканировании с использованием подвижного зеркала данные изображения из двух смежных линий вдоль направления вспомогательного сканирования взвешиваются, с тем, чтобы предотвратить какую бы то ни было неравномерную плотность или ухудшение в разрешении, даже когда линии сканирования записываются на поверхности фоточувствительного элемента зигзагообразно.
Так как настоящее изобретение использует отклоняющее средство для выполнения возвратно-поступательного сканирования, предоставлена возможность использования микрозеркала уменьшенного размера. Согласно настоящему изобретению также достигается высокоскоростная запись, исключая высокоскоростную вибрацию из-за возвратно-поступательного сканирования, таким образом значительно снижая образование полос вследствие вибрации, повышение температуры, шумы и потребляемую мощность.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - вид в поперечном сечении, показывающий конструктивный пример устройства формирования изображения согласно варианту осуществления изобретения;
фиг.2 - вид в поперечном сечении, показывающий конструктивный пример узла управления экспонированием в устройстве формирования изображения согласно варианту осуществления изобретения;
фиг.3 - принципиальная схема, показывающая пример компоновки схемы управления лазером согласно варианту осуществления изобретения;
фиг.4 - структурная схема, показывающая управление в главном направлении сканирования согласно варианту осуществления изобретения;
фиг.5 - временная диаграмма, показывающая пример формирования ШИМ-сигнала изображения узлом модуляции согласно варианту осуществления;
фиг.6А - структурная схема, показывающая пример компоновки узла управления приводным электродвигателем подвижного зеркала согласно варианту осуществления изобретения;
фиг.6В - структурная схема, показывающая пример детализированной компоновки узла 86 расчета весов данных изображения по фиг. 6А;
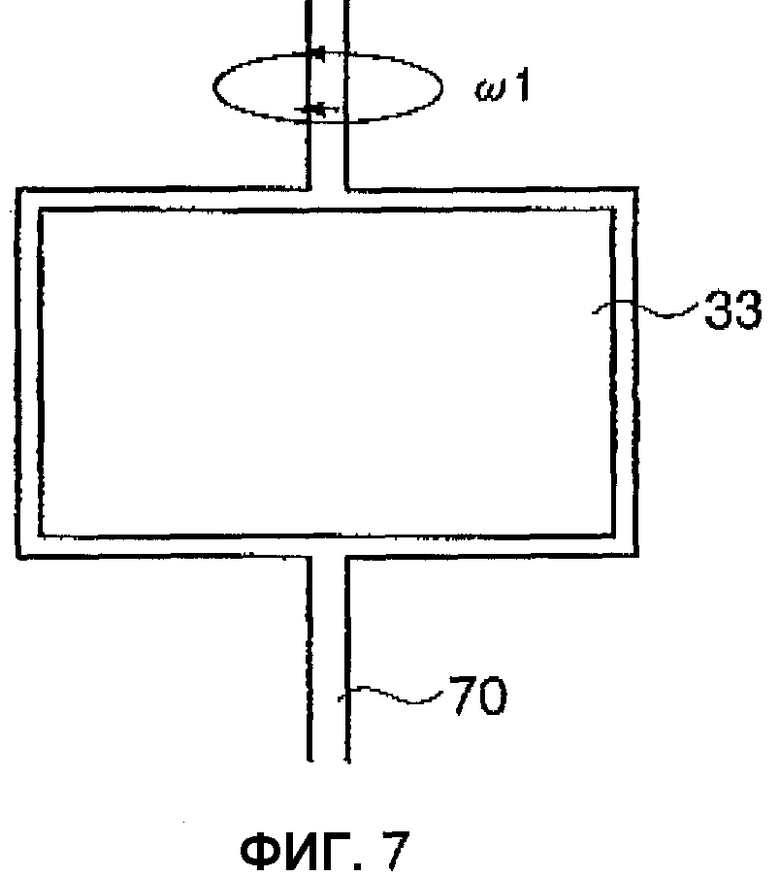
фиг.7 - вид, показывающий конструктивный пример подвижного зеркала согласно варианту осуществления изобретения;
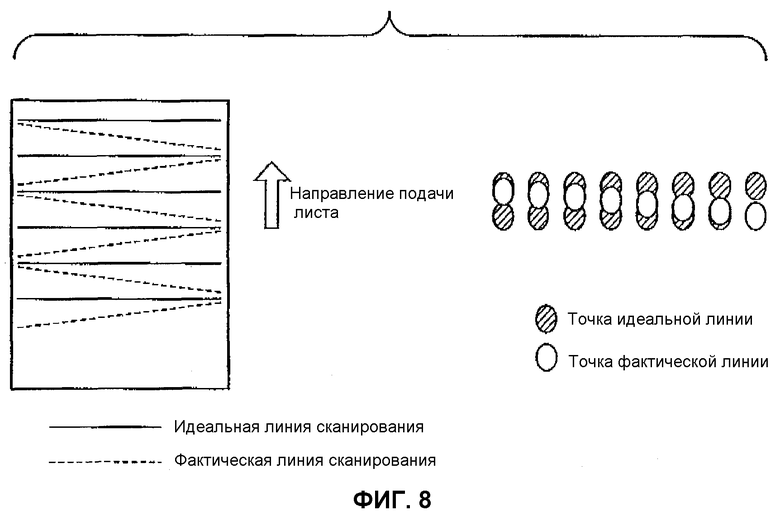
фиг.8 - вид, показывающий способ компенсации изображения согласно варианту осуществления изобретения;
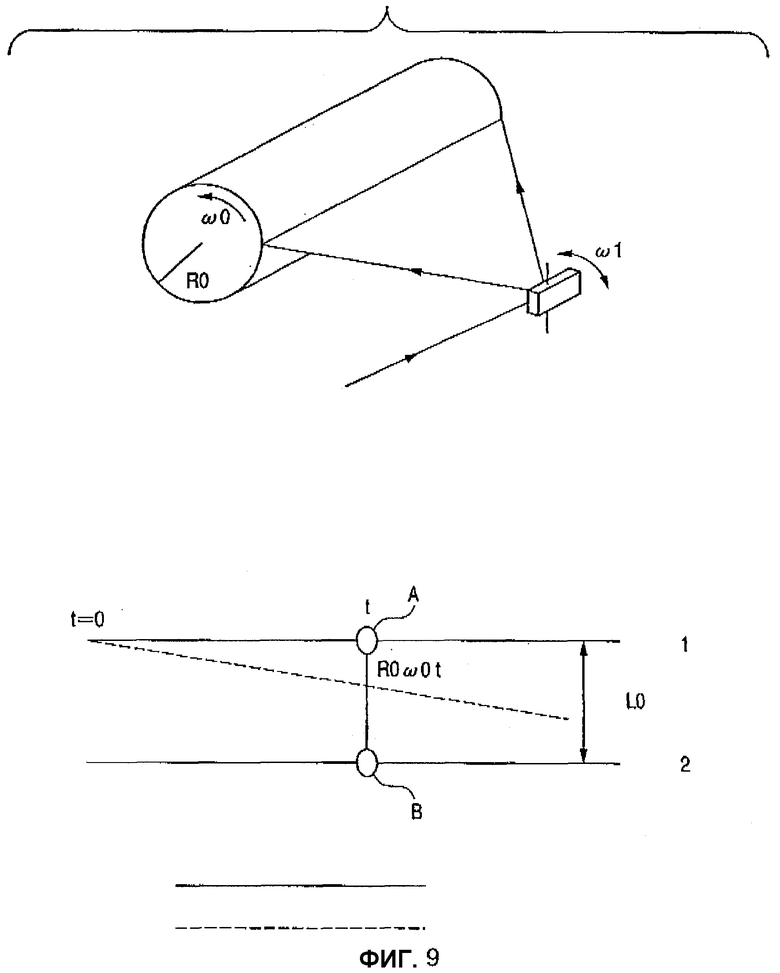
фиг.9 - вид, иллюстрирующий сканирование относительно фоточувствительного элемента и взвешивание двух линий в направлении вспомогательного сканирования;
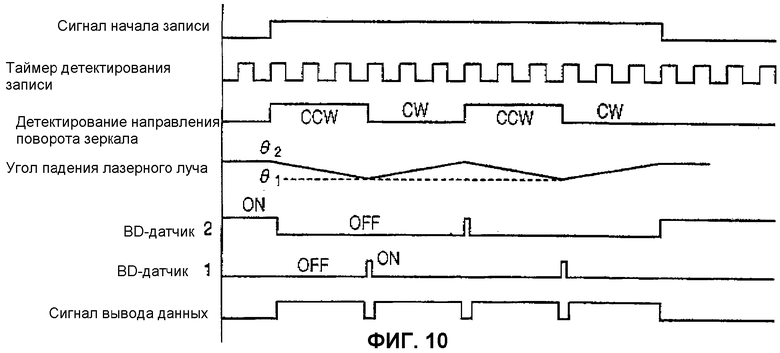
фиг.10 - временная диаграмма, показывающая вывод данных изображения во время возвратно-поступательного сканирования согласно варианту осуществления изобретения;
фиг.11 - блок-схема последовательности операций способа, показывающая вывод данных изображения во время возвратно-поступательного сканирования согласно варианту осуществления изобретения; и
фиг.12 - вид, показывающий угол падения лазерного луча по отношению к подвижному зеркалу согласно варианту осуществления изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Вариант осуществления согласно настоящему изобретению будет описан ниже со ссылкой на прилагаемые чертежи.
<Конструктивный пример устройства формирования изображения согласно варианту осуществления изобретения>
Фиг.1 - вид в поперечном сечении, показывающий пример всего устройства формирования изображения, к которому применено настоящее изобретение. Основные операции будут описаны со ссылкой на фиг.1.
Оригиналы, сложенные на автоподатчике 1 документов, последовательно, один за другим, подаются на поверхность стеклянного стола 2 оригиналов. Когда оригинал подан, лампа 3 в секции сканнера включается, а сканерный узел 4 перемещается так, чтобы освещать оригинал. Свет, отраженный оригиналом, проходит через линзу 8, через зеркала 5, 6 и 7 и затем вводится в узел 9 датчика изображения. Сигнал изображения, введенный в узел 9 датчика изображения, сразу или временно сохраняется в блоке памяти изображения (не показан). После повторного считывания этот сигнал изображения вводится в узел 10 управления экспонированием.
Электростатическая среда 11 освещается светом, испускаемым узлом 10 управления экспонированием, для формирования на нем требуемого латентного изображения. Результирующее изображение проявляется проявочным узлом 13. Элемент переноса подается из узла 14 или 15 накопления элементов переноса наряду с синхронизацией его временных характеристик с вышеприведенным формированием латентного изображения. Вышеприведенное проявленное тонерное изображение передается на элемент переноса посредством узла 16 переноса. Переданное тонерное изображение фиксируется на элементе переноса узлом 17 фиксации, а затем элемент переноса выпускается наружу устройства узлом 18 выгрузки листов. Поверхность электростатической среды 11 после переноса очищается очистителем 25. Поверхность электростатической среды 11, которая была очищена очистителем 25, подвергается удалению заряда вспомогательным зарядным устройством 26, с тем, чтобы получать приемлемые заряды в основном зарядном устройстве 28. Любые остаточные заряды на электростатической среде 11 устраняются посредством лампы 27 предварительного экспонирования. Поверхность электростатической среды 11 заряжается основным зарядным устройством 28. Эти последовательности операций повторяются для формирования изображений на большом количестве листов.
(Пример компоновки узла 10 управления экспонированием)
Фиг.2 - вид, показывающий конструктивный пример узла 10 управления экспонированием.
Со ссылкой на фиг.2 позиция 31 обозначает узел возбуждения лазера; а 43 - полупроводниковый лазер. PD-датчик для частичного детектирования лазерного луча скомпонован внутри полупроводникового лазера 43 и выполняет APC (автоматическое регулирование мощности) для лазерного диода с использованием сигнала детектирования из PD. Лазерный пучок лучей, испускаемый лазером 43, коллимируется в почти параллельный пучок посредством коллиматорной линзы 35 и диафрагмы 32 и падает на подвижное зеркало 33 при предварительно определенном диаметре пучка. Подвижное зеркало 33 возвратно-поступательно поворачивается в направлении стрелки с постоянной угловой скоростью ω1. Наряду с возвратно-поступательным поворотом падающий луч света отражается будучи сформированными в отклоненные пучки, которые постоянно меняют свои углы отклонения. Отклоненные пучки света концентрируются линзами 34 f-θ. Одновременно линзы 34 f-θ осуществляют коррекции искаженной аберрации, с тем, чтобы гарантировать, что развертка будет линейной в течение некоторого времени, световые пучки комбинируются и последовательно сканируются по электростатической среде 11 в качестве носителя изображения с постоянной скоростью в направлении стрелки на фиг.2. Датчик 1 36 детектирования луча (в дальнейшем указываемого ссылкой как BD) детектирует свет, отраженный подвижным зеркалом 33. Сигнал детектирования из BD-датчика 1 36 используется в качестве сигнала синхронизации для синхронизации поворота подвижного зеркала 33 с записью данных. Так как подвижному зеркалу 33 предоставлена возможность двигаться согласно возвратно-поступательному сканированию, сигналам синхронизации для синхронизации записи данных необходимо детектироваться по меньшей мере в двух точках. Поэтому также есть необходимость в размещении BD-датчика 2 37.
Традиционно, чтобы удерживать определенное количество лазерного пучка лучей в течение одной постоянной сканирования, схема возбуждения лазера устройства формирования изображения этого типа приспособлена для способа детектирования лазерного луча, выводимого в интервале детектирования света в течение одного сканирования, и поддержания тока возбуждения лазера во время одного сканирования.
(Примеры компоновки и работы схемы возбуждения лазера)
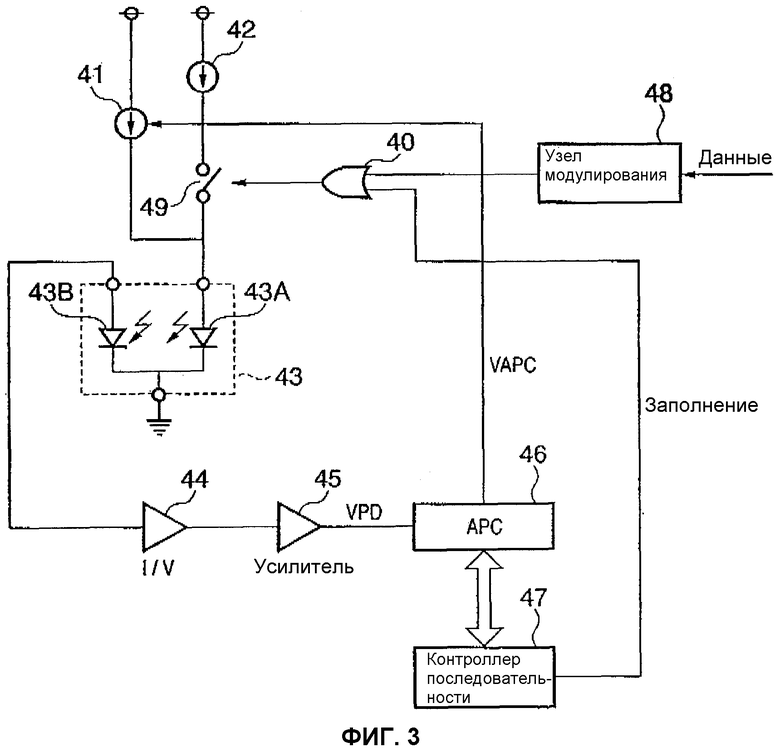
Способ управления током возбуждения лазера далее будет описан конкретно, со ссылкой на фиг.3.
Как показано на фиг.3, устройство формирования изображения этого типа использует микросхему 43 лазера, которая содержит один лазер 43А и один фотодиодный (в дальнейшем указываемый ссылкой как PD) датчик 43В. Предпринимается попытка использовать два источника тока, то есть источник 41 тока смещения и источник 42 импульсного тока к микросхеме 43 лазера, тем самым улучшая характеристики испускания лазера 43А. Для стабилизирования испускания луча лазера 43А выходной сигнал из PD-датчика 43В возвращается в источник 41 тока смещения, с тем, чтобы автоматически управлять величиной тока смещения. То есть логический элемент 40 выводит сигнал «Включения» на ключ 49 в ответ на сигнал полного «Включения» от контроллера 47 последовательности, с тем, чтобы общая сумма токов от источника 41 тока смещения и источника 42 импульсного тока подавалась в микросхему 43 лазера. Выходной сигнал из PD-датчика 43В в это время подается в преобразователь 44 тока/напряжения, усиливается усилителем 45 и подается в схему 46 APC. Получающийся в результате сигнал подается в качестве управляющего сигнала на источник 41 тока смещения из схемы 46 APC.
Эта система цепей называется системой цепей APC (автоматическая регулировка мощности), которая в настоящее время общеизвестна как система цепей возбуждения лазера. Лазерный луч демонстрирует температурную характеристику, в которой чем выше температура, тем больше значение тока, требуемое для получения постоянного количества света. К тому же, так как лазер сам себя разогревает, просто питания постоянным током недостаточно для получения постоянного количества света. Эти факторы имеют огромное влияние на формирование изображения. Для решения этих проблем значение тока, которое должно подаваться в течение каждого сканирования, управляется с использованием вышеописанной системы цепей АРС для каждого сканирования, для поддержания характеристики испускания луча постоянной для каждого сканирования. Посредством включения/выключения ключа 49 изображение формируется из данных, полученных посредством принуждения узла 48 модулирования элементов изображения модулировать лазерный луч, величина которого управляется таким образом, чтобы быть постоянной.
(Пример компоновки узла 48 модуляции)
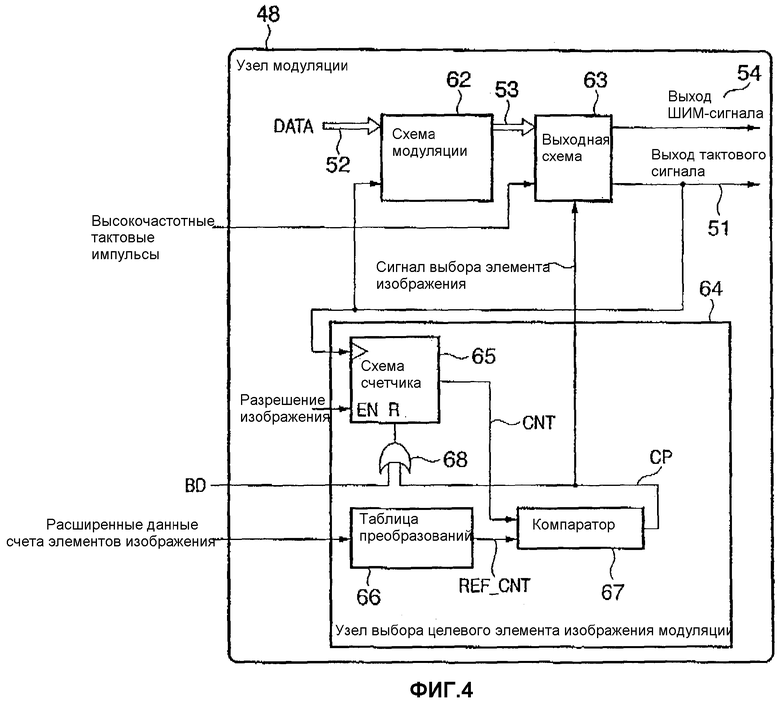
Фиг.4 - структурная схема, показывающая пример компоновки узла 48 модуляции по фиг.3.
Со ссылкой на фиг.4, высокочастотные тактовые импульсы, которые должны вводиться в выходную схему 63 узла 64 выбора элементов изображения, выводятся из PLL-схемы (логики с программируемыми соединениями) (не показана). Эти тактовые импульсы имеют частоту, N-кратную частоте основных тактовых импульсов. Схема 62 модуляции модулирует входные данные изображения (ДАННЫЕ). Для представления тональности лазерного луча время пребывания в состоянии «ВКЛ» в пределах единицы времени часто управляется посредством ШИМ-модуляции. Поэтому здесь будет описана ШИМ-модуляция (в частности цифровая ШИМ-модуляция).
Например, для осуществления ШИМ-модуляцию А-битных входных данных они преобразуются в 2-А битный широтно-импульсный сигнал. В это время связанная постоянная устанавливается, чтобы удовлетворять 2A=n. Схема 62 модуляции формирует широтно-импульсный сигнал из входных данных и передает этот сигнал в выходную схему 63. В соответствии с широтно-импульсным сигналом, полученным схемой 62 модуляции, выходная схема 63 выводит ШИМ-сигнал изображения и тактовый сигнал изображения, оба синхронизированные с выходом высокочастотных тактовых импульсов из PLL-схемы. ШИМ-сигнал изображения и тактовый сигнал изображения передаются в схему возбуждения лазера и узел обработки изображения, соответственно.
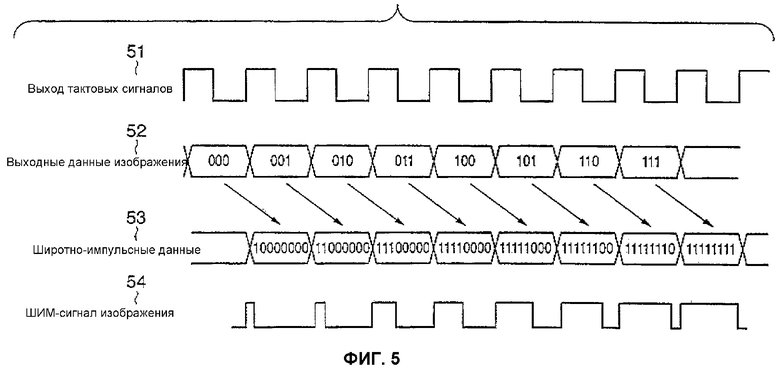
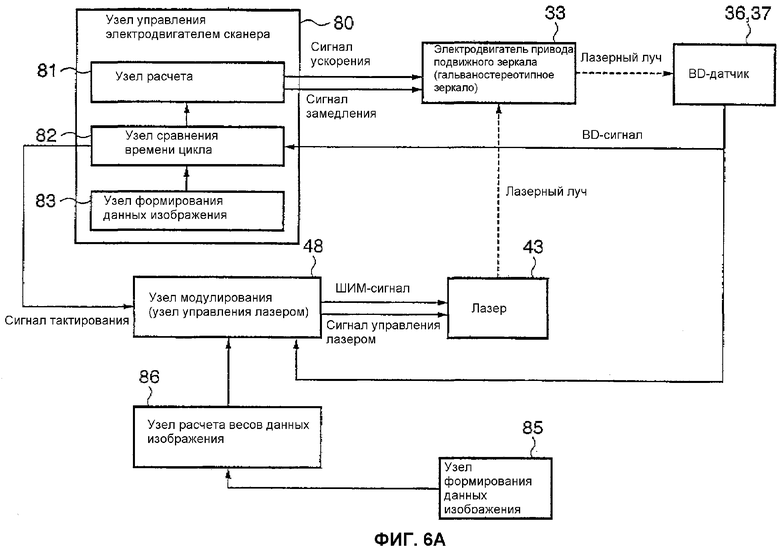
Фиг.5 показывает пример формирования ШИМ-сигнала изображения узлом 48 модуляции. Фиг.5 показывает следующее состояние. В качестве входных данных изображения (ДАННЫХ) 52 3-битные данные вводятся в схему 62 модулирования. Получающиеся в результате данные выводятся в виде 8-битных ШИМ-данных 53. ШИМ-сигнал 54 изображения выводится из выходной схемы 63 на основе ШИМ-данных 53. Основные операции подвижного зеркала 33 будут описаны далее, со ссылкой на фиг.2 и 6А.
Электродвигатель (не показан) предоставляет подвижному зеркалу 33 возможность возвратно-поступательного вращения с предварительно определенной скоростью поворота (угловой скоростью ω1). Способ приведения в действие не всегда требует использование электродвигателя и может использовать приведение в движение посредством статического электричества или приведение в движение посредством электромагнитной силы. Операции этого электродвигателя включают в себя сравнение времен цикла BD-сигналов с эталонным временем цикла. BD-сигналы детектируются поочередно BD-датчиком 36 и BD-датчиком 37 для каждой линии. Эталонное время цикла формируется узлом 83 формирования эталонного времени цикла. Для сопоставления результирующего времени цикла с целевым временем цикла узел 81 расчета осуществляет управление для устойчивого вращения электродвигателя посредством вывода сигнала ускорения/замедления.
Конструкция подвижного зеркала 33 здесь будет описана со ссылкой на фиг.7. Подвижное зеркало 33 возвратно-поступательно поворачивается вокруг шарнира зеркала (центральной оси зеркала) 70 в качестве центра. Недавно было разработано подвижное зеркало, которое является монолитным, без приводного вала.
Способ компенсации изображения согласно варианту осуществления изобретения будет описан далее, со ссылкой на фиг.8.
Когда электростатическая среда 11 возвратно-поступательно сканируется лазерным лучом с использованием подвижного зеркала 33, и линии сканирования на его поверхности двумерно распространяются, данные изображения сдвигаются в направлении, обратном направлению подачи от краевой части, как указано пунктирными линиями на фиг. 8. Является естественным, что линии сканирования слегка наклоняются, потому что электростатическая среда 11 вращается. Поскольку лазерное сканирование посредством традиционной многогранной схемы с использованием многогранного зеркала использует однонаправленное сканирование вместо возвратно-поступательного сканирования, все линии сканирования наклонены единообразно независимо от угла наклона. Более того, так как скорость лазерного сканирования значительно выше, чем скорость вращения электростатической среды 11, наклон линий сканирования является визуально незначительным. Однако при возвратно-поступательном сканировании, как в этом варианте осуществления изобретения, данные могут демонстрировать заметные изменения плотности, так как направление сканирования разворачивается для каждой линии, имея следствием повреждение изображения.
Для решения этой проблемы два смежных элемента данных вдоль направления вспомогательного сканирования взвешиваются для каждой линии на основе истекшего времени и длины поворотного движения электростатической среды 11. Узел 86 расчета весов данных изображения согласно фиг.6А осуществляет взвешивание данных, сформированных узлом 85 формирования данных изображения.
(Пример компоновки узла 86 расчета весов данных изображения)
Фиг.6В - структурная схема, показывающая пример компоновки, в котором узел 86 расчета весов данных изображения реализован микрокомпьютером. Такие же ссылочные позиции, как на других чертежах, обозначают идентичные функциональные компоненты на фиг. 6В. Как показано на фиг. 6В, узел 86 расчета весов данных изображения может быть реализован программным обеспечением, либо аппаратными средствами.
Со ссылкой на фиг.6В узел 86 расчета весов данных изображения содержит ЦП 861 (центральный процессор, CPU), который используется для управления арифметическим устройством и имеет в распоряжении таймер 861а для измерения времени. Узел 86 расчета весов данных изображения дополнительно содержит программу 862а, постоянные параметры и ПЗУ (постоянное запоминающее устройство, ROM) 862. Программа 862а указывает процедуру расчета весов данных изображения. Постоянные параметры служат в качестве составляющих компонентов, необходимых для расчета весов данных изображения. ПЗУ 862 хранит уравнение. Постоянные параметры включают в себя радиус R0 электростатической среды 11, расстояние R1 сканирования от подвижного зеркала 33 до поверхности электростатической среды 11 и длину L1 одной линии сканирования между BD-датчиками 36 и 37. В качестве уравнения хранится нижеследующее уравнение компенсации данных изображения.
Узел 86 расчета весов данных изображения, кроме того, еще дополнительно содержит ОЗУ 863 (оперативное запоминающее устройство, RAM), которое временно сохраняет данные, необходимые для инициирования ЦП 861 выполнять программу 862а расчета весов данных изображения. ОЗУ 863 содержит области 863а-863j. Область 863а хранит направление поворота подвижного зеркала 33, детектированное датчиком 33b направления вращения подвижного зеркала. Область 863b хранит угловую скорость ω1 подвижного зеркала 33, измеренную датчиком 33а угловой скорости подвижного зеркала. Область 863с хранит угловую скорость ω0 электростатической среды 11, измеренную датчиком 11а угловой скорости фоточувствительного элемента. Область 863d хранит скорость вращения R0 × ω0 электростатической среды 11, рассчитанную по радиусу R0 и угловой скорости ω0 электростатической среды 11. Область 863е хранит скорость сканирования R1 × ω1 подвижного зеркала 33, рассчитанную по расстоянию R1 сканирования и угловой скорости ω1 подвижного зеркала 33. Область 863f хранит длину L перемещения в направлении вспомогательного сканирования в течение времени от начала записи до окончания записи для одной линии относительно поверхности электростатической среды 11. Область 863g хранит время t основного сканирования от начала записи для одной линии, измеренное таймером 861а. Область 863h хранит данные А элементов изображения линии, находящейся за две линии до текущей линии по направлению вспомогательного сканирования. Область 863i хранит данные B элементов изображения линии, находящейся за две линии до текущей линии по направлению вспомогательного сканирования. Область 863j хранит компенсированные данные Δ элементов изображения, рассчитанные по вышеприведенным численным значениям в соответствии с уравнением 862е компенсации данных изображения.
Узел 86 расчета весов данных изображения, кроме того, еще дополнительно содержит буфер 864 данных изображения, который буферизует, с использованием метода FIFO (первый вошел, первый обслужен) или LIFO (последним вошел, первым обслужен) в соответствии с направлением 863а поворота подвижного зеркала, данные, по меньшей мере, двух линий вдоль направления вспомогательного сканирования сверх данных изображения, сформированных узлом 85 формирования данных изображения.
Компенсированные данные Δ (863j) элементов изображения, в качестве результата расчета весов, полученных узлом 86 расчета весов данных изображения, выводятся в узел 48 модуляции.
Назначение для ПЗУ 862, ОЗУ 863 и буфера 864 данных изображения по фиг.6В является только примером и не ограничивается этим.
<Пример работы устройства формирования изображения согласно варианту осуществления изобретения>
(Способ взвешивания данных)
Способ взвешивания данных будет описан ниже, со ссылкой на фиг.9. Способ взвешивания данных реализован согласно примеру компоновки на фиг.6В.
Со ссылкой на фиг.9 пусть А и В будут данными элементов изображения двух идеальных элементов данных вдоль направления вспомогательного сканирования, которые становятся смежными, после истечения времени t с начала записи данных, а α(t) будет весовым коэффициентом в качестве функции истекшего времени.
Фактически записанные данные Δ(t) элементов изображения, принимая во внимание длину смещения в направлении вспомогательного сканирования, когда электростатическая среда 11 постоянно вращается, заданы согласно:
Δ(t)=A × (1-α(t))+B × α(t),
где α(t) представляет почти прямую линию как функцию времени t. Угловой коэффициент у α(t) задан как значение, полученное делением длины перемещения барабана за единицу времени на длину сканирования в основном направлении сканирования за единицу времени. То есть, допуская, что t0 будет временем сканирования для одной линии, взвешивание данных линии 1 является большим сразу после начала записи данных, а взвешивание данных линии 2 становится большим, когда время t приближается ко времени t0.
В качестве способа взвешивания, отличного от описанного выше, который показан на фиг.9, радиус и угловая скорость электростатической среды 11 установлены в R0 и ω0 соответственно, а расстояние между линиями установлено в L0. К тому же, время от начала записи данных установлено в t (0≤t≤t0, где t0 - время до окончания записи для одной линии). Данные элементов изображения двух идеальных элементов данных вдоль направления вспомогательного сканирования, которые становятся смежными после истечения времени t с начала записи данных, установлены для А и В.
Допуская, что Δ будет фактически записанными данными элементов изображения, принимая во внимание длину смещения в направлении вспомогательного сканирования, когда электростатическая среда 11 постоянно вращается, данные изображения компенсируются так, чтобы удовлетворять:
Δ=A × (L0-R0ω0t)/L0+B × R0ω0t/L0.
Однако это применяется к случаю, в котором положение начала записи изображения совпадает с таковой у первого элемента данных первой линии, а положение окончания записи совпадает с таковой у последнего элемента данных второй линии.
Следовательно, в целом, допуская, что L будет длиной перемещения в направлении вспомогательного сканирования в течение времени от начала записи данных до окончания записи данных, данные элементов изображения компенсируются скоростью сканирования зеркала и скоростью вращения электростатической среды 11, с тем, чтобы удовлетворять:
Δ=A × (L-R0ω0t)/L+B × R0ω0t/L.
Способ записи данных в этом случае выполняется согласно схеме FIFO (которая предоставляет возможность данным, считываемым в прямом направлении, выводиться в прямом направлении). Для управления синхронизацией начала записи данных производится управление началом операции записи после истечения предварительно определенного времени после того как BD-датчиком 36 (37) детектировался лазерный луч.
Операции для записи данных второй и третьей линий управляются подобным образом, чтобы осуществлять запуск после истечения предварительно определенного времени после того как лазерный луч детектировался BD-датчиком 37 (36). Таймер (не показан) управляется для запуска одновременно с началом записи. Способ записи данных в этом случае выполняется посредством схемы LIFO (которая предоставляет возможность данным, считываемым в прямом направлении, выводиться в обратном направлении). Вывод данных управляется, чтобы выполняться посредством поочередного использования схем FIFO и LIFO для каждой линии. Вывод данных с использованием схем FIFO и LIFO управляется направлением поворота зеркала и направлением сканирования лазера. Отметим, что возвратно-поступательное сканирование лазерным лучом необходимо выполнять до тех пор, пока лазерный луч не детектируется BD-датчиком после окончания операции записи. Когда лазерный луч детектируется BD-датчиком, определяются следующие временные характеристики начала записи данных. Длина перемещения в направлении основного сканирования является функцией угловой скорости ω1 подвижного зеркала 33.
То есть узел 86 расчета весов данных изображения по фиг.6В всегда считывает данные изображения двух линий и выполняет расчет весовой интерполяции. Рассчитанные данные изображения выводятся посредством поочередного использования схем FIFO и LIFO для каждой линии. Весовая интерполяция узла 86 расчета весов данных изображения может быть реализована аппаратными средствами, либо программным обеспечением.
(Разъяснение временной диаграммы во время возвратно-поступательного сканирования)
Возвратно-поступательное сканирование с использованием подвижного зеркала 33 согласно этому варианту осуществления изобретения будет разъяснено ниже, со ссылкой на временную диаграмму согласно фиг.10.
При включении сигнала лазерной записи подвижное зеркало 33 начинает операцию поворота из условия, чтобы оно уходило от HP-датчика подвижного зеркала (не показан). BD-датчик 36 (37) также может служить в качестве HP-датчика подвижного зеркала. В это время направление поворота подвижного зеркала 33 может определяться его средством детектирования направления вращения. При повороте подвижного зеркала 33 и осуществлении BD-датчиком 1 36 детектирования лазерного луча выполняется управление для начала записи данных на электростатическую среду 11 после истечения предварительно определенного времени после детектирования лазерного луча. Время с того момента, когда BD-датчик 1 36 детектирует лазерный луч, до начала записи данных управляется с использованием таймера.
Как описано выше, данные, которые должны выводиться в этот момент, созданы так, чтобы иметь вид данных элемента изображения, полученных посредством взвешивания, в соответствии с положениями в направлении основного сканирования двух элементов изображения двух смежных линий вдоль направления вспомогательного сканирования. Тип вывода данных в этом случае определяется на основе направления поворота подвижного зеркала 33. Например, в случае по фиг.10 выполняется управление для вывода данных согласно схеме FIFO, если направлением поворота подвижного зеркала 33 является CCW, и согласно схеме LIFO, если направлением поворота подвижного зеркала 33 является CW. Соответствие между направлением поворота подвижного зеркала 33 и типом вывода данных является обратимым.
Когда запись данных первой линии является завершенной, управление для поворота подвижного зеркала 33 в обратном направлении, то есть направлении CW, в этом случае инициируется в результате детектирования лазерного луча. Выполняется управление, чтобы начинать запись данных второй линии на электростатическую среду 11 после истечения предварительно определенного времени после того как BD-датчик 2 детектировал лазерный луч. Тип вывода данных в этом случае управляется так, чтобы выводить данные согласно схеме, отличной от первой линии, то есть схеме LIFO. Посредством повторения вышеприведенных операций завершается запись данных изображения одного листа. Сигнал лазерной записи затем отключается.
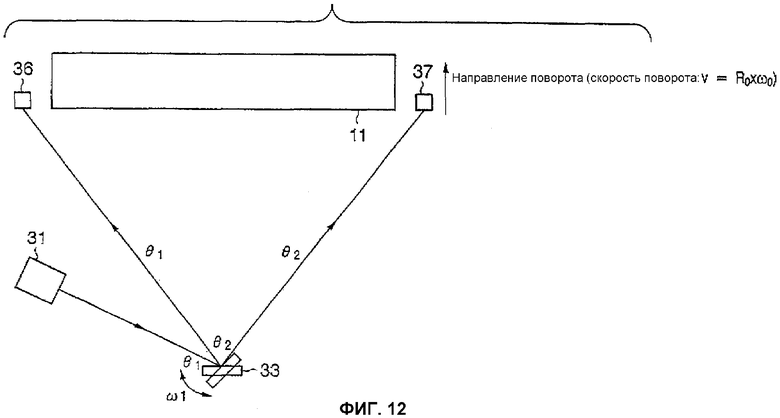
Заметим, что скорость поворота подвижного зеркала 33 регулируется для постоянной угловой скорости. Угловая скорость ω1 подвижного зеркала 33 устанавливается значительно большей, чем угловая скорость ω0 электростатической среды.
Как показано на фиг.12, угол 6 падения лазерного луча по отношению к подвижному зеркалу 33 попадает в диапазон θ1≤θ≤θ2. θ1 представляет угол падения луча относительно подвижного зеркала 33, когда его детектирует BD-датчик 1 36, а θ2 представляет угол падения луча относительно подвижного зеркала 33, когда его детектирует BD-датчик 2 37.
(Пример процедуры обработки выходных данных во время возвратно-поступательного сканирования)
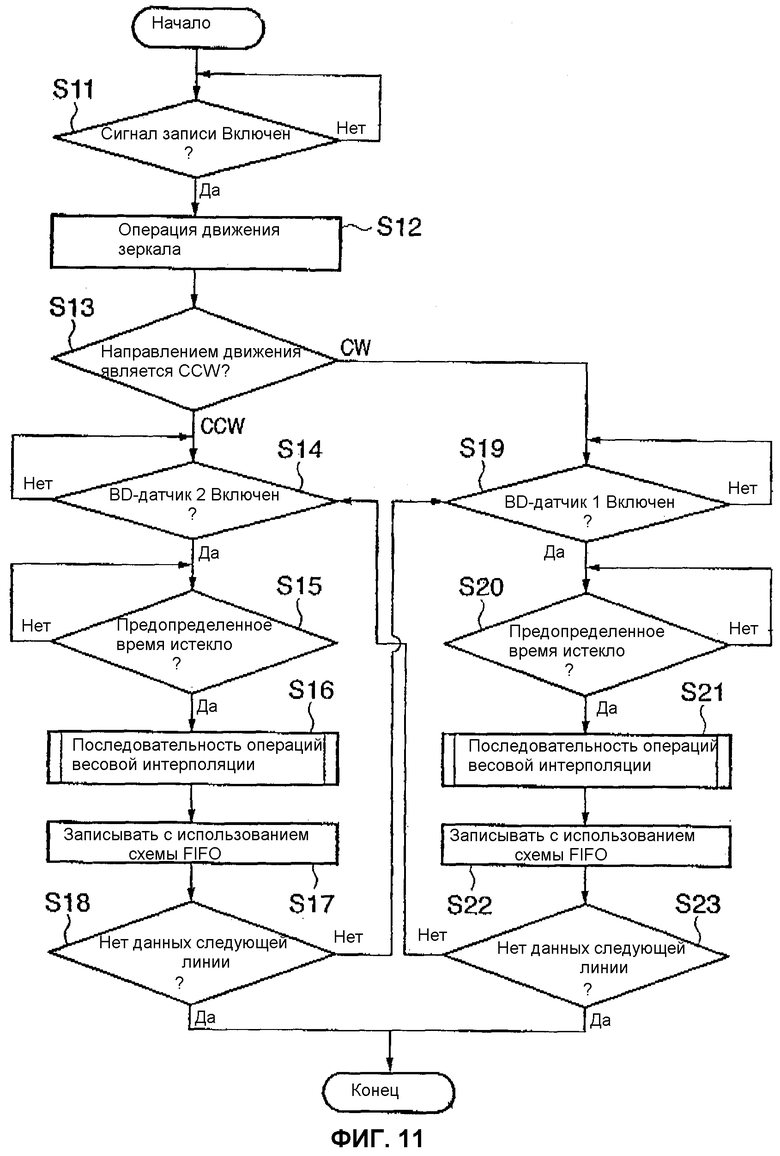
Процедура обработки выходных данных во время возвратно-поступательного сканирования с использованием подвижного зеркала 33, согласно этому варианту осуществления изобретения, будет описана далее со ссылкой на блок-схему последовательности операций способа по фиг.11. Блок-схема последовательности операций способа по фиг.11 соответствует программе 862а взвешивания данных изображения, выполняемой ЦП 861 согласно фиг.6В.
Когда сигнал записи лазерного сканирования (S11) включается, подвижное зеркало 33 начинает работать в направлении сканирования электростатической среды 11 (S12). Если направлением поворота подвижного зеркала 33 является направление CCW (S13), данные изображения, которые подверглись последовательности операций весовой интерполяции (S16), записываются в положении начала записи, спустя предварительно определенный период времени (S15) после того как BD-датчик 2 37 детектировал луч (S14). В этом случае тип вывода данных изображения от положения начала записи изображения управляется по схеме FIFO (S17).
Если направлением поворота подвижного зеркала 33 является направление CW (S13), данные изображения, которые подверглись последовательности операций весовой интерполяции (S21), записываются в положении начала записи, спустя предварительно определенный период времени (S20) после того как BD-датчик 1 36 детектировал луч (S19). В этом случае тип вывода данных изображения от положения начала записи изображения управляется по схеме LIFO (S22). После того как операции обработки, поочередно использующие схемы FIFO и LIFO для каждой линии для вывода изображения, повторяются (S18,S23), завершается сканирование данных изображения последней линии. Сигнал записи изображения лазерного сканирования затем управляется, чтобы быть выключенным. В этом случае последовательности операций весовой интерполяции на этапах S16 и S21 могут быть реализованы посредством той же самой подпрограммы.
Настоящее изобретение может применяться к системе или интегрированному устройству, включающему в себя большое количество устройств (например, главный компьютер, устройство сопряжения, считывающее устройство и принтер), или устройству, включающему в себя единственный компонент.
Цель настоящего изобретения равно достигается посредством предоставления запоминающей среды (или записывающей среды), которая хранит программы управления для реализации функций вышеописанных вариантов осуществления для системы или устройства или инициирования компьютера (либо ЦП или МП (микропроцессора, MPU)), системы или устройства считывать и выполнять программы управления, хранимые на запоминающей среде. В этом случае программы управления, считанные с запоминающей среды, сами реализуют функции вышеописанного варианта осуществления изобретения, а запоминающая среда, которая хранит программы управления, и составляет настоящее изобретение. Функции вышеописанного варианта осуществления реализуются не только, при выполнении программ управления компьютером, но также когда операционная система (ОС, OS), работающая на компьютере, выполняет часть или всю фактическую обработку на основе инструкций программ управления.
Функции вышеописанного варианта осуществления также реализуются, когда программы управления, считанные со среды запоминающего устройства, записываются в память функциональной платы расширения, вставленной в компьютер, или функциональный блок расширения, присоединенный к компьютеру, а ЦП функциональной платы расширения или функционального блока расширения выполняет часть или всю фактическую обработку на основе инструкций программ управления.
Когда настоящее изобретение применяется к вышеприведенной запоминающей среде, оно хранит программу управления, соответствующую вышеописанным блок-схемам последовательностей операций способов.
Несмотря на то, что настоящее изобретение было описано со ссылкой на примерные варианты осуществления, должно быть понятно, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем последующей формулы изобретения должен быть соответственным, с наиболее широким толкованием, с тем, чтобы охватывать все такие модификации и эквивалентные конструкции и функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2373063C1 |
| СИСТЕМЫ И СПОСОБЫ КОНТРОЛЯ И/ИЛИ УПРАВЛЕНИЯ ОБРАБОТКОЙ С ВОБУЛЯЦИЕЙ С ИСПОЛЬЗОВАНИЕМ ВСТРОЕННОЙ КОГЕРЕНТНОЙ ВИЗУАЛИЗАЦИИ (ICI) | 2019 |
|
RU2795069C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2299457C2 |
| РУЧНОЕ ИМПУЛЬСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОЧИСТКИ ИЛИ ОБРАБОТКИ ПОВЕРХНОСТИ | 2018 |
|
RU2730325C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ВОСПРИИМЧИВОСТИ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ В СОСТАВЕ СОЛНЕЧНЫХ БАТАРЕЙ К ОПТИЧЕСКОМУ ИЗЛУЧЕНИЮ | 2013 |
|
RU2565331C2 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2226291C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2372635C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2476918C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2535634C2 |
| УСТРОЙСТВО ОПТИЧЕСКОГО СКАНИРОВАНИЯ И УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, ИСПОЛЬЗУЮЩЕЕ ТАКОЙ АНАЛИЗАТОР | 2008 |
|
RU2392648C1 |


Изобретение относится к устройству формирования изображения для копировального аппарата, лазерного принтера и факса. Изобретение предоставляет возможность предотвращать любую неравномерную плотность и ухудшение в разрешении при возвратно-поступательном сканировании лазера с использованием подвижного зеркала. Устройство формирования изображения формирует изображение на фоточувствительном элементе посредством сканирования фоточувствительного элемента лазерным лучом, отражаемым подвижным зеркалом, с помощью возвратно-поступательного движения подвижного зеркала, угол поворота которого является изменяемым в соответствии с электрическим сигналом. Устройство детектирует направление поворота подвижного зеркала и осуществляет взвешивание, на основе направления вращения, данных изображения двух линий вдоль направления вспомогательного сканирования в соответствии с соотношением протяженности сканирования после начала лазерной записи, чтобы линия сканирования лазера компенсировала изображение, которое должно формироваться с использованием подвижного зеркала. 2 н. и 3 з.п. ф-лы, 12 ил.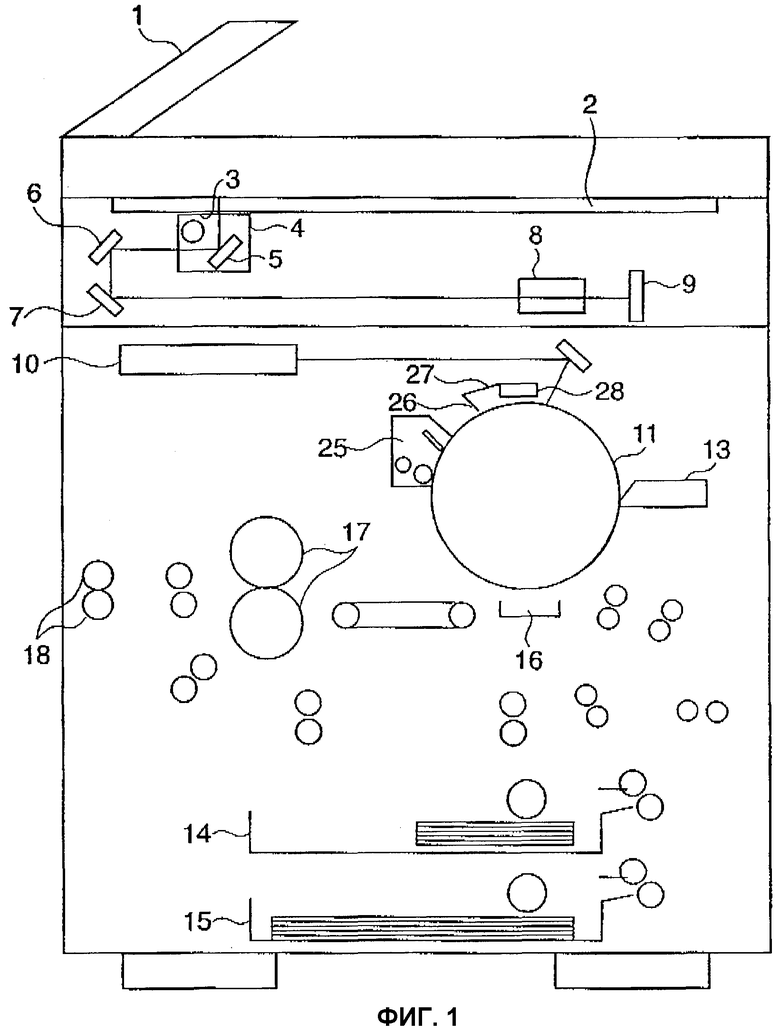
средство (33b) детектирования направления поворота для выявления направления поворота подвижного зеркала (33);
средство (36, 37) детектирования лазерного луча для детектирования лазерного луча сканирующего фоточувствительный элемент (11) в основном направлении сканирования, и
средство (86) коррекции изображения для корректировки данных изображения и вывода скорректированных данных на источник излучения для управления его испусканием, при этом указанное средство (86) коррекции изображения изменяет коэффициенты взвешивания пропорционально времени сканирования после начала сканирования по линии лазерного сканирования в прямом и обратном направлениях вдоль основного направления сканирования, на основании направления поворота (CCW/CW) подвижного зеркала (33), выявленного упомянутым средством (33b) детектирования и детектирования лазерного луча средством (36, 37) детектирования лазерного луча, и формирует скорректированные данные изображения для линии лазерного сканирования в прямом и обратном направлениях вдоль основного направления сканирования путем взвешивания данных изображения двух смежных линий вдоль направления вспомогательного сканирования ортогонального основному направлению сканирования с изменением коэффициентов взвешивания для компенсации изображения, которое должно формироваться с использованием подвижного зеркала (33).
первое средство (11а) детектирования скорости вращения для выявления скорости вращения фоточувствительного элемента (11);
второе средство (33a) детектирования скорости вращения для выявления угловой скорости подвижного зеркала (33); и таймер (861 а), который измеряет время сканирования, истекшее после начала лазерного сканирования в прямом и обратном направлениях на основании детектирования лазерного луча средством (36, 37) детектирования лазерного луча,
при этом упомянутое средство (86) коррекции изображения включает в себя средство (862е, S16, S21) расчета весовых коэффициентов для расчета весовых коэффициентов, на основании скорости вращения фоточувствительного элемента (11), скорости поворота подвижного зеркала (33), направления поворота подвижного зеркала (33), и времени сканирования измеренным указанным таймером(861а).
осуществляют первый этап детектирования (S13) направления поворота подвижного зеркала(13);
второй этап детектирование сканирования лазерным лучом фоточувствительного элемента вдоль направления основного сканирования; и этап корректировки (862е, 863h-863j, S16, S21) данных изображения и вывода откорректированных данных изображения на источник излучения для управления его испусканием, при этом при осуществлении этапа корректировки (S16, S21) весовые коэффициенты изменяются пропорционально времени сканирования после начала сканирования по линии лазерного сканирования в прямом и обратном направлениях вдоль основного направления сканирования, на основании направления поворота (CCW/CW) подвижного зеркала (33), выявленного на первом этапе детектирования (S13) и детектирования лазерного луча на втором этапе детектирования (S14), и
формируют скорректированные данные изображения для линии лазерного сканирования в прямом и обратном направлениях вдоль основного направления сканирования путем взвешивания данных изображения двух смежных линий вдоль направления вспомогательного сканирования ортогонального основному направлению сканирования с изменением коэффициентов взвешивания для компенсации изображения, которое должно формироваться с использованием подвижного зеркала (33).
| US 6816269 B1, 09.11.2004 | |||
| ОПТИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ), УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ (ВАРИАНТЫ) И УСТРОЙСТВО ФОРМИРОВАНИЯ ЦВЕТНОГО ИЗОБРАЖЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257601C2 |
| US 5811795 A, 22.09.1998 | |||
| US 5677724 A, 14.10.1997 | |||
| EP 0674422 A2, 27.09.1995 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ НОСИТЕЛЯ МАГНИТНОЙ ЗАПИСИ | 0 |
|
SU271052A1 |
| US 5264945 A, 23.11.1993. | |||

