Заявляемое изобретение относится к системам автоматического управления самолетом, в частности к системам, обеспечивающим управление самолетом при отказе информационной системы.
Известны системы автоматического управления полетом самолета, в которых в случае отказа информационной системы основного контура управления управление полетом осуществляют посредством резервного (аварийного) контура. Подобные системы управления описаны, в частности, в патентах на изобретения RU 2235042, В64С 13/00, G06F 13/00; RU 2235043, B64C 13/00, G06F 13/00; RU 2235044, B64C 13/00, G06F 13/00; в книге Автоматизированное управление полетом воздушных судов/ Под ред. С.М.Федорова. М.: Транспорт, 1992, с.165-167 и в Руководстве по летной эксплуатации самолета А-320.
К недостаткам известных систем автоматического управления, использующих основной и резервный контуры управления, следует отнести тот факт, что в случае отказа информационной системы и переключения на резервный контур управления не представляется возможным обеспечить требования к качеству переходных процессов в контуре управления во всем эксплуатационном диапазоне высот и скоростей, в частности, применительно к высокоманевренным самолетам.
Наиболее близкой по технической сущности к заявляемой системе является система автоматического управления полетом самолета, представленная в Руководстве по летной эксплуатации самолета А-320. Данная система управления также предусматривает в случае отказа информационной системы переключение с основного контура управления на резервный ("direct law"). При этом формирование управляющего сигнала осуществляется в соответствии с алгоритмом, согласно которому передаточные числа по сигналам угловых скоростей, перегрузок и сигналов датчиков отклонения органов управления имеют постоянные наперед заданные значения и не зависят от высотно-скоростных параметров в момент отказа информационной системы.
Недостатком известной системы автоматического управления является то, что для высокоманевренного самолета, например, типа Миг-29 КУБ не удается обеспечить приемлемые характеристики управляемости во всем диапазоне высот и скоростей полета при постоянных передаточных числах сигналов управления. Причем передаточные числа в основном и резервном контурах управления, как правило, отличаются минимум в 3 раза, в результате чего при переключении режимов происходит существенное изменение параметров движения самолета, таких как нормальная и боковая перегрузка, углы тангажа, крена и рыскания, что, в свою очередь, существенно снижает безопасность полета
Целью изобретения является обеспечение требуемых характеристик управляемости самолета и безопасности полета при отказе информационной системы.
Поставленная цель достигается за счет того, что в систему автоматического управления полетом высокоманевренного самолета, содержащую информационную систему, на выходе которой формируются сигналы, соответствующие высотно-скоростным параметрам полета, интегральный блок датчиков, вычислитель основного контура управления, вычислитель резервного контура управления, последовательно соединенные коммутатор, привод и аэродинамический руль, причем выход информационной системы по сигналу признака исправности подключен к управляющему входу коммутатора, выходы информационной системы по сигналам статического давления, динамического скоростного напора и числа Маха подключены соответственно к первому, второму и третьему входам вычислителя основного контура управления, выходы интегрального блока датчиков по сигналам нормальной перегрузки, угловой скорости тангажа и датчика положения ручки подключены соответственно к четвертому, пятому и шестому входам вычислителя основного контура управления и к первому, второму и третьему входам вычислителя резервного контура управления, а выходы вычислителей подключены соответственно к нормально замкнутому и к нормально разомкнутому контактам коммутатора, дополнительно введены запоминающее устройство, два пороговых устройства, логическое устройство и интегрирующее устройство, первый, второй, третий и четвертый входы запоминающего устройства соединены соответственно с выходами информационной системы по сигналам признака исправности, статического давления, динамического скоростного напора и числа Маха, выход запоминающего устройства по сигналу статического давления подключен к входу первого порогового устройства и к первому входу интегрирующего устройства, выход по сигналу динамического скоростного напора подключен к второму входу интегрирующего устройства, выход по сигналу числа Маха подключен к входу второго порогового устройства и к третьему входу интегрирующего устройства, выходы пороговых устройств подключены к соответствующим входам логического устройства, выходы которого по сигналам выбранных значений статического давления, динамического скоростного напора, числа Маха и времени их изменения подключены соответственно к четвертому, пятому, шестому и седьмому входам интегрирующего устройства, выходы интегрирующего устройства по сигналам статического давления, динамического скоростного напора и числа Маха подключены к соответствующим входам вычислителя резервного контура управления.
Сущность изобретения поясняется чертежом, на котором представлена функциональная схема заявляемой системы автоматического управления полетом высокоманевренного самолета.
Система содержит информационную систему 1, интегральный блок 2 датчиков, вычислитель 3 основного контура управления, вычислитель 4 резервного контура управления, коммутатор 5, привод 6, аэродинамический руль 7, запоминающее устройство 8, пороговые устройства 9 и 10, логическое устройство 11 и интегрирующее устройство 12.
При полете самолета происходит изменение его высотно-скоростных параметров, таких как, например, статическое давление, динамический скоростной напор, число Маха и др. Соответствующие им сигналы формируются на втором, третьем и четвертом выходах информационной системы 1. Данные сигналы поступают соответственно на первый, второй и третий входы вычислителя 3 основного контура управления. С помощью этих сигналов осуществляется изменение значений передаточных чисел управляющих сигналов (нормальной перегрузки, угловой скорости тангажа, датчика положения ручки), поступающих с выхода интегрального блока 2 датчиков соответственно на четвертый, пятый и шестой входы вычислителя 3 основного контура управления и на первый, второй и третий входы вычислителя 4 резервного контура управления. При этом в вычислителях 3 и 4 основного и резервного контуров управления реализованы одинаковые законы изменения передаточных чисел. В случае исправной работы информационной системы 1 сигнал признака ее исправности поступает на управляющий вход коммутатора 5, при этом управляющий сигнал, сформированный в вычислителе 3 основного контура управления, через нормально замкнутый контакт коммутатора 5 поступает на привод 6, под воздействием которого происходит отклонение аэродинамического руля 7 и автоматическое управление самолетом. В случае отказа информационной системы 1 и отсутствия в результате этого сигнала признака исправности данной системы на управляющем входе коммутатора 5 и на первом входе запоминающего устройства 8 происходит отключение привода 6 от выхода вычислителя 3 основного контура управления и подключение его к выходу вычислителя 4 резервного контура управления. Одновременно происходит запоминание сигналов высотно-скоростных параметров полета, таких как статическое давление, динамический скоростной напор и число Маха, имеющих место в момент отказа системы 1 и поступающих соответственно на второй, третий и четвертый входы запоминающего устройства 8. Запомненные сигналы с выходов устройства 8 поступают соответственно: сигнал статического давления - на вход порогового устройства 9 и первый вход интегрирующего устройства 12, на второй вход которого поступает сигнал динамического скоростного напора, а на третий вход - сигнал числа Маха, поступающий также на вход порогового устройства 10. С выходов пороговых устройств 9 и 10 сигналы статического давления и числа Маха поступают на соответствующие входы логического устройства 11, при этом, если величины запомненных значений сигналов статического давления (Рст.) и числа Маха (М) равны или больше порогового значения (Рпор., Мпор.), на выходе соответствующего порогового устройства формируется сигнал логической «1», если Рст. и М меньше Рпор. и Мпор. - сигнал логического «0». В логическом устройстве 11 формируются четыре массива выбранных значений высотно-скоростных параметров полета, в частности статического давления, динамического скоростного напора, числа Маха и времени их изменения в зависимости от значений сигналов на выходе пороговых устройств 9 и 10, например:
Рст.>Рпор. и М>Мпор. - полет на малых высотах и больших М,
Рст.<Рпор. и М>Мпор. - полет на больших высотах и больших М,
Рст.>Рпор. и М<Мпор. - полет на малых высотах и малых М,
Рст.<Рпор. и М<Мпор. - полет на больших высотах и малых М.
Для каждого из этих пространственных положений самолета выбираются с учетом траектории возврата самолета на аэродром фиксированные значения высотно-скоростных параметров и время, за которое их необходимо изменить от значений в момент отказа до выбранных значений. Данные сигналы статического давления, динамического скоростного напора, числа Маха и времени поступают с выходов логического устройства 11 соответственно на четвертый, пятый, шестой и седьмой входы интегрирующего устройства 12.
Таким образом, в интегрирующем устройстве 12 по каждому параметру осуществляют изменение его значений от величин, поступающих на первые три входа, до величин, поступающих соответственно на четвертый, пятый и шестой входы, за время, пропорциональное сигналу, поступающему на седьмой вход данного устройства. Сигналы статического давления, динамического скоростного напора и числа Маха с выходов интегрирующего устройства 12 подают соответственно на четвертый, пятый и шестой входы вычислителя 4 резервного контура управления, осуществляя изменение передаточных чисел по сигналам управления «безударно», обеспечивая требования к характеристикам устойчивости и управляемости.
Как показали результаты моделирования комплексной системы управления КСУ-941, при использовании данной системы автоматического управления высокоманевренным самолетом представляется возможность при отказе информационной системы «безударно» (без динамических ошибок по сигналам перегрузки и угловой скорости) перейти на резервный контур управления и обеспечить приемлемые характеристики устойчивости и управляемости в системе и, тем самым, повысить безопасность полета. Из вышеизложенного следует, что предлагаемая система реализуема и применима, в частности, для высокоманевренного самолета типа МИГ-29 КУБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2007 |
|
RU2339540C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2380279C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2606712C2 |
Изобретение относится к технике автоматического управления пространственным маневрированием самолета, в частности к системам управления самолетом, предусматривающим при отказе информационной системы переключение с основного контура управления на резервный контур управления. На выходе информационной системы формируются сигналы высотно-скоростных параметров, таких как статическое давление, динамический скоростной напор, число Маха. На выходе интегрального блока датчиков формируются сигналы нормальной перегрузки, угловой скорости тангажа и положения ручки. Имеются вычислители основного и резервного контуров управления, коммутатор, привод и аэродинамический руль. В резервный контур управления дополнительно введены запоминающее устройство, два пороговых устройства, логическое устройство и интегрирующее устройство. При отказе информационной системы в системе автоматического управления происходит отключение привода от вычислителя основного контура управления и подключение его к вычислителю резервного контура управления. При этом в резервном контуре управления запоминаются высотно-скоростные параметры полета на момент отказа информационной системы и определяется пространственное положение самолета. В соответствии с пространственным положением, занимаемым самолетом в момент отказа информационной системы, выбираются фиксированные значения высотно-скоростных параметров и время, за которое их необходимо изменить от значений в момент отказа информационной системы до выбранных значений. Изобретение позволяет осуществить «безударный» (без динамических ошибок по управляющим сигналам перегрузки, угловой скорости) переход на резервный контур управления и повысить безопасность полета. 1 ил.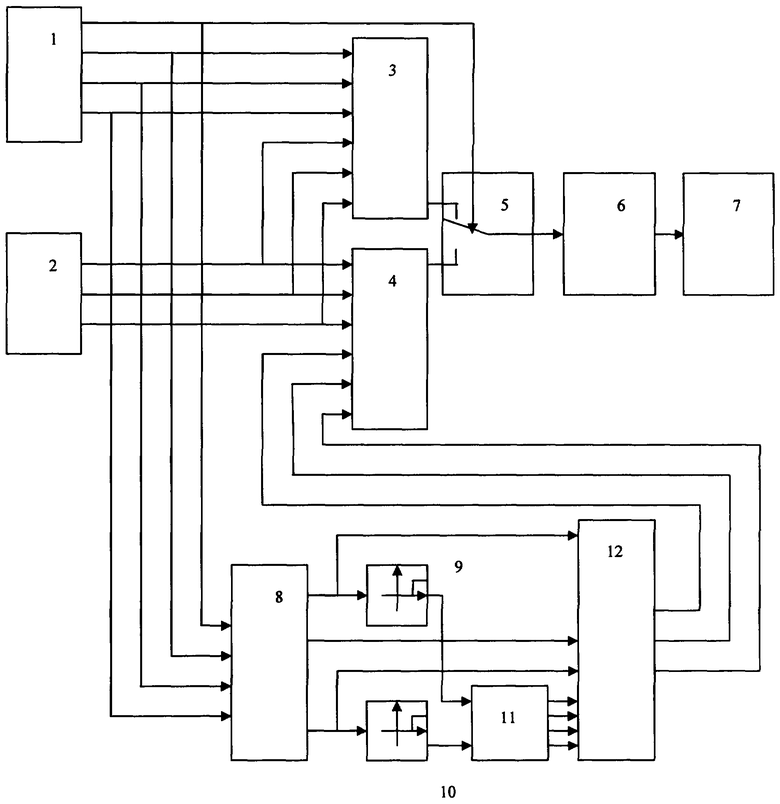
Система автоматического управления полетом высокоманевренного самолета, содержащая информационную систему, интегральный блок датчиков, вычислитель основного контура управления, вычислитель резервного контура управления, последовательно соединенные коммутатор, привод и аэродинамический руль, причем выход информационной системы по сигналу признака исправности подключен к управляющему входу коммутатора, выходы информационной системы по сигналам статического давления, динамического скоростного напора и числа Маха подключены соответственно к первому, второму и третьему входам вычислителя основного контура управления, выходы интегрального блока датчиков по сигналам нормальной перегрузки, угловой скорости тангажа и датчика положения ручки подключены соответственно к четвертому, пятому и шестому входам вычислителя основного контура управления и к первому, второму и третьему входам вычислителя резервного контура управления, а выходы вычислителей подключены соответственно к нормально замкнутому и к нормально разомкнутому контактам коммутатора, отличающаяся тем, что в нее дополнительно введены запоминающее устройство, два пороговых устройства, логическое устройство и интегрирующее устройство, причем первый, второй, третий и четвертый входы запоминающего устройства соединены соответственно с выходами информационной системы по сигналам признака исправности, статического давления, динамического скоростного напора и числа Маха, выход запоминающего устройства по сигналу статического давления подключен к входу первого порогового устройства и к первому входу интегрирующего устройства, выход по сигналу динамического скоростного напора подключен к второму входу интегрирующего устройства, выход по сигналу числа Маха подключен к входу второго порогового устройства и к третьему входу интегрирующего устройства, выходы пороговых устройств подключены к соответствующим входам логического устройства, выходы которого по сигналам выбранных значений статического давления, динамического скоростного напора, числа Маха и времени их изменения подключены соответственно к четвертому, пятому, шестому и седьмому входам интегрирующего устройства, выходы интегрирующего устройства по сигналам статического давления, динамического скоростного напора и числа Маха подключены к соответствующим входам вычислителя резервного контура управления.
| Прибор для вибрационного пневматического массажа барабанной перепонки | 1936 |
|
SU58236A1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |

