Изобретение относится к области автоматического управления, а более конкретно к комплексным системам управления и системам дистанционного управления полетом летательного аппарата посредством отклонения вектора тяги, и может быть применено в системах управления маневренных самолетов.
Развитие маневренных самолетов долгое время проходило в рамках концепции «быстрее и выше». Однако вскоре после перехода на реактивные двигатели стало ясно, что дальнейшее расширение области применения приводит к существенным и, в большинстве случаев, неоправданным затратам. После упорядочения и стабилизации области применения маневренных самолетов в координатах Н и M(Vпр), которая произошла в процессе создания самолетов третьего поколения, дальнейшее совершенствование характеристик шло, главным образом, в направлении увеличения маневренности.
На самолетах четвертого поколения появились интегральные компоновочные схемы, где в дополнение к наплывам на крыле стал несущим и фюзеляж, был осуществлен переход к аэродинамически неустойчивым компоновкам с использованием адаптивного крыла или его элементов и непосредственного управления подъемной и боковой силами с применением систем дистанционного управления для обеспечения требуемой устойчивости и управляемости. В настоящее время возможности повышения маневренности средствами аэродинамики и компоновки в значительной степени исчерпаны («Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов». Под редакцией Г.С.Бюшгенса, М., «Наука», 1998).
Хорошо известно, что эффективность аэродинамических поверхностей квадратично растет с ростом скорости полета, а с уменьшением скорости полета и увеличением углов атаки существенно падает вследствие затенения хвостового оперения, что приводит к явлению сваливания и штопора (М.Г.Котик. Критические режимы сверхзвукового самолета. - М.: Машиностроение, 1967). Газодинамическое же управление растет пропорционально числу М, но на малых скоростях полета его эффективность не обращается в нуль, что в отличие от аэродинамического управления позволяет построить управление самолетом даже на закритических углах атаки (α>30°).
Поэтому дальнейшее улучшение маневренных характеристик самолета возможно при освоении полета на закритических углах атаки, так называемый режим сверхманевренности, достигаемый при дополнении привычного аэродинамического управления посредством аэродинамических органов управления газодинамическим управлением посредством отклоняемого в полете вектора тяги.
Известна система приводов осесимметричного сопла с изменяемым вектором тяги, имеющая множество контуров управления мощностью (патент US №5740988), содержащая многофункциональную систему управления отклонением вектора тяги осесимметричного сопла посредством шести гидравлических приводов, отклоняющих сверхзвуковые створки сопла двигателя. В этом случае появляется возможность повысить надежность системы за счет питания трех гидроприводов от одной гидросистемы, а трех других - от другой гидросистемы, или понизить располагаемые усилия каждого гидропривода за счет увеличения их количества. Подобная схема, состоящая из шести гидроприводов, сложна по кинематике и громоздка по реализации, что неизбежно понижает надежность работы двигателя и самолета в целом. Поэтому для реализации в двигателе была принята схема с тремя гидроприводами, аналогичная такой, как в патенте US №6142416, в котором представлена гидравлически резервированная система управления и способ управления для отклонения вектора тяги осесимметричного сопла.
Из уровня техники известен способ управления вектором тяги маршевых двигателей (патент RU №2122510). Направление вектора тяги в известном способе регулируют, отклоняя сопла двигателей приводами, получающими сигналы относительно наперед заданных значений положений сопел, создавая при этом продольный момент.
Также известны патенты: RU №2122511 «Управление самолетом посредством управления вектором тяги» и RU №2122963 «Система управления двухдвигательным самолетом посредством управления вектором тяги».
Наиболее близкими к предложенному способу управления двухдвигательным самолетом и системе управления для его осуществления являются способ и система управления, описанные в патенте RU №2122963.
Известный способ управления двухдвигательным самолетом заключается в том, что управляющие сигналы с поста управления летчика поступают на аэродинамические органы и газодинамические органы, которые обеспечивают управление вектором тяги, обработку и формирование управляющих сигналов производят в вычислительной системе, при этом управляющие сигналы для каждого из органов управления корректируют по высотно-скоростным параметрам и углу атаки, а формирование требуемого отклонения вектора тяги осуществляют посредством отклонения сопел приводами газодинамических органов.
В известной системе сопла поворачивают вокруг осей, расположенных под наклоном к горизонтальной плоскости самолета. При этом сигналы для управления соплами формируют таким образом, что сопла отклоняются только тогда, когда стабилизаторы и рули направления находятся в положениях, близких к предельным, то есть тогда, когда их возможности исчерпаны, или тогда, когда самолет находится на больших углах атаки, причем отклонение сопел происходит только в ограниченном диапазоне скоростных напоров и высот.
Известная система управления двухдвигательного самолета содержит поворотные сопла двигателей с гидравлическими приводами, с которыми соединены функциональные блоки, связанные последовательно между собой. Имеются вычислители продольного и путевого управления аэродинамическими поверхностями, датчики углов атаки, скоростного напора и высоты. В систему введены нелинейный корректор усиления по углу атаки, электронный и суммирующий усилители, нелинейные усилители продольного и путевого управления аэродинамическими поверхностями, сумматоры сопел. Также введены корректоры по скоростному напору и высоте сопел, устройства выбора минимального сигнала. Сопла расположены под углом к оси их поворота.
Вследствие установки оси вращения поворотных сопел правого и левого двигателей под наклоном к горизонтальной плоскости самолета известный способ и система управления предполагают взаимозависимость каналов крена и рыскания при дифференциальном отклонении сопел. Кроме того, сигналы управления на органы газодинамического управления поступают после того, как возможности аэродинамического управления уже исчерпаны и они одинаковы для аэродинамического и газодинамического управления, что не позволяет построить полноценное управление на закритических углах атаки и околонулевых скоростях полета и сохранить неизменной плоскость выполнения маневра. Это ограничивает маневренные возможности самолета и затрудняет его пилотирование.
Улучшение маневренных характеристик самолета, повышение безопасности полета и устойчивости самолета за счет сохранения плоскости выполнения маневра неизменной и полностью управляемой в процессе выполнения всего маневра на закритических углах атаки и малых скоростях полета может быть достигнуто при дополнении привычного аэродинамического управления, при помощи аэродинамических органов управления, газодинамическим управлением посредством отклоняемого в полете вектора тяги. При этом как управляющие подсистемы в управлении самолета в части выхода на органы управления они должны работать независимо одна от другой, каждая по своим алгоритмам.
Кроме этого, в известных системах управления самолетом применяется одноосевое регулирование вектора тяги (управление по одной оси). Преимущество газодинамического управления для улучшения маневренности самолета наиболее полно позволяет реализовать многоосевое регулирование (управление по двум осям отклоняемого сопла двигателя: вертикальной и горизонтальной).
Задачей изобретения является улучшение маневренности самолета за счет обеспечения возможности независимого управления самолетом по каждому из каналов управления: тангажу, рысканию или крену при повышении безопасности полета, устойчивости и управляемости самолета на больших углах атаки, включая закритические, и околонулевых скоростях полета.
Другой задачей изобретения является повышение боевой эффективности за счет быстрого разворота оси оружия на цель с возможностью опережения в пуске ракеты и расширения самой зоны возможных пусков.
Поставленная задача, в части первого объекта, решается за счет того, что в способе управления двухдвигательным самолетом управляющие сигналы с поста управления летчика поступают на аэродинамические органы управления самолета и газодинамические органы управления, представляющие собой регулируемые сопла, которые обеспечивают отклонение вектора тяги, обработку и формирование управляющих сигналов производят в вычислительной системе, при этом управляющие сигналы для каждого из органов управления корректируют по высотно-скоростным параметрам и углу атаки, а формирование требуемого отклонения вектора тяги осуществляют посредством отклонения регулируемых сопел правого и левого двигателей приводами газодинамических органов, при этом управляющие сигналы с поста управления летчика разделяют на два тракта, тракт дистанционного управления аэродинамическими органами и тракт отклонения вектора тяги, и подают в вычислительную систему, разделенную на две функциональные вычислительные подсистемы, основную и дополняющую, первые - в основную, а вторые - в дополняющую; в основной вычислительной подсистеме, во всем диапазоне высот и скоростей полета, производят обработку и формирование управляющих сигналов тракта дистанционного управления аэродинамическими органами, идущих на рулевые приводы аэродинамических органов, осуществляя воздействие на такие параметры полета, как угловые скорости, углы атаки и скольжения, нормальную и боковую перегрузки, изменяя и поддерживая их в допустимых пределах, а также на параметры изменения траектории полета, такие как углы тангажа, крена и рыскания, скорость и высота полета; при малых скоростях полета и больших углах атаки в работу включают дополняющую вычислительную подсистему, в которой производят обработку и формирование управляющих сигналов тракта отклонения вектора тяги, идущих на приводы газодинамических органов; обе вычислительные подсистемы работают в общем информационном поле, а в части выхода на органы управления - совместно и независимо одна от другой, при этом управление самолетом осуществляют за счет совместного функционирования аэродинамических и газодинамических органов, создавая управляющие моменты в продольной, поперечной и горизонтальной плоскостях самолета и реализуя управление по каналам тангажа, рыскания и крена; при этом в каждой из вычислительных подсистем сигналы по тангажу, крену и рысканию суммируют с сигналами от датчиков параметров полета, которые используют как обратную связь для улучшения характеристик устойчивости и управляемости полетом, причем в качестве обратных связей для сигналов, поступающих в основную вычислительную подсистему, используют сигналы, поступающие от датчиков угловых скоростей, углов атаки и скольжения, нормальной и боковой перегрузок, а для сигналов, поступающих в дополняющую вычислительную подсистему, используют сигналы, поступающие от датчиков угловых скоростей, углов атаки и скольжения; сформированные таким образом сигналы подают: первые - на вход рулевых приводов аэродинамических органов управления, а вторые через блок управления приводов газодинамических органов, в котором производят синхронизацию и динамическую коррекцию движений приводов газодинамических органов, - на вход приводов газодинамических органов.
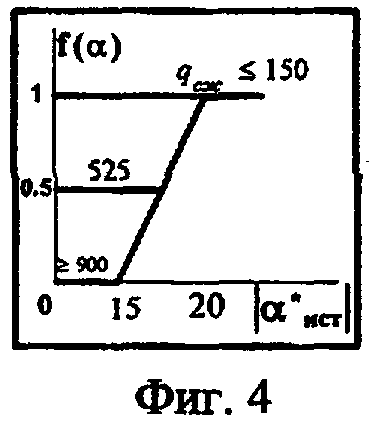
При этом дополняющую вычислительную подсистему включают в работу на скоростях полета qсж≤150 кг/см2 независимо от текущего значения угла атаки, а при qсж>150 кг/см2 - в диапазоне углов атаки от 15° до 20°, где qсж - сжимаемый скоростной напор; на углах атаки свыше 20° дополняющая вычислительная подсистема работает независимо от скорости полета.
Дополняющую вычислительную подсистему отключают при скорости полета Vпp≥600 км/ч, где Vпp - приборная скорость полета.
При этом требуемое отклонение вектора тяги осуществляют в зависимости от получаемой в полете оценки текущей эффективности тяги правого и левого двигателей.
Кроме того, требуемое отклонение вектора тяги осуществляют и с учетом режима работы каждого двигателя, изменяя при этом входные сигналы на каждый привод газодинамических органов в зависимости от диаметра критической части регулируемого сопла и приемистости двигателя.
Причем сигналы от датчиков угловых скоростей, используемые в качестве обратной связи в основной вычислительной подсистеме, поступают в нее по каналу цифровой связи из дополняющей вычислительной подсистемы.
Сигналы от датчиков углов атаки и скольжения, используемые в качестве обратной связи в дополняющей вычислительной подсистеме, поступают в нее по каналу цифровой связи из вычислителя высотно-скоростных параметров после фильтрации и преобразования в истинные значения углов атаки и скольжения самолета.
Кроме этого, сигналы по тангажу, крену и рысканию, поступающие в дополняющую вычислительную подсистему, суммируют в ней с сигналами компенсации весовой составляющей, инерционного и гироскопического моментов, информация для формирования которых в дополняющую вычислительную подсистему поступает из вычислителя высотно-скоростных параметров, навигационной системы самолета и системы управления двигателей.
При этом формирование в дополняющей вычислительной подсистеме сигналов компенсации весовой составляющей, инерционного и гироскопического моментов осуществляют в зависимости от проводимой в полете оценки текущей эффективности тяги правого и левого двигателей, тригонометрических зависимостей углов тангажа и крена самолета, моментов инерции и угловых скоростей роторов высокого и низкого давлений правого и левого двигателей, для этого в вычислителе высотно-скоростных параметров из сигналов статического и динамического давлений формируются сигналы числа Маха, истинной воздушной скорости, высоты полета и истинного скоростного напора.
Отклонение регулируемых сопел обеспечивают за счет отклонения сверхзвуковых створок регулируемого сопла каждого двигателя тремя приводами газодинамических органов посредством перемещения выходных штоков.
При этом для перемещения выходных штоков, управляющих сверхзвуковыми створками сопел, в блоке управления приводов газодинамических органов производят разложение вектора тяги каждого двигателя в двух плоскостях, вертикальной и горизонтальной, на составляющие по ходу движения выходного штока каждого привода, а затем проводят обратный пересчет от ходов штоков к отклонению вектора тяги в вертикальной и горизонтальной плоскостях двигателя.
При этом управление самолетом по каналу тангажа могут обеспечивать при совместном отклонении створок сопла каждого двигателя в продольной плоскости самолета и отклонении стабилизатора; по каналу крена - при дифференциальном отклонении створок сопла каждого двигателя в продольной плоскости и дифференциальном отклонении стабилизатора и элеронов; по каналу рыскания - при совместном отклонении створок сопла каждого двигателя в поперечной плоскости и отклонении рулей направления.
Кроме того, синхронизацию движений приводов газодинамических органов осуществляют с учетом положения центра управляющего кольца регулируемого сопла каждого из двигателей, когда центр управляющего кольца остается зафиксированным на оси сопла при перемещении выходного штока каждого из приводов газодинамических органов, а движение всех выходных штоков приводов начинается и заканчивается одновременно, что достигается ограничением сигналов, поступающих на вход приводов газодинамических органов.
А динамическую коррекцию движений приводов газодинамических органов для каждого регулируемого сопла осуществляют за счет дополнения механической обратной связи в приводах газодинамических органов электрической, получающей сигналы от значений положений выходных штоков каждого из приводов газодинамических органов и скорости их перемещения через датчики обратных связей приводов газодинамических органов.
Поставленная задача в части второго объекта решается за счет того, что система управления двухдвигательным самолетом содержит аэродинамические органы управления самолета и газодинамические органы управления, представляющие собой управляемые приводами газодинамических органов регулируемые сопла, правое и левое, с отклоняемым вектором тяги, соединенные с функциональными блоками, включающими вычислительную систему управления аэродинамическими и газодинамическими органами, датчики угла атаки и высотно-скоростных параметров, при этом вычислительная система выполнена цифровой и состоит из четырех функционально независимых блоков: двух вычислительных подсистем, основной и дополняющей, вычислителя высотно-скоростных параметров и блока управления приводов газодинамических органов, соединенных между собой каналами цифровой связи для обмена информацией по параметрам полета, при этом основная вычислительная подсистема образует тракт дистанционного управления аэродинамическими органами, связанный с рулевыми приводами аэродинамических органов, а дополняющая - тракт отклонения вектора тяги, связанный с приводами газодинамических органов; система управления также дополнительно содержит датчики параметров полета, такие как датчики угла скольжения, нормальной и боковой перегрузок, угловых скоростей, а в качестве датчика высотно-скоростных параметров - датчик статического и динамического давлений, кроме этого система управления содержит ручку управления самолетом и датчики поста управления летчика: положения ручки управления по тангажу и крену, положения педалей для управления по рысканию и положения рычагов управления правого и левого двигателей; при этом вход основной вычислительной подсистемы соединен с выходами датчиков положения ручки управления по тангажу и крену, с выходами датчиков углов атаки и скольжения, нормальной и боковой перегрузок, а также с выходом дополняющей вычислительной подсистемы для получения сигналов от датчиков угловых скоростей и положения педалей по каналу цифровой связи, а ее выход - со входами рулевых приводов аэродинамических органов управления; вход дополняющей вычислительной подсистемы соединен с выходами датчиков: положения ручки управления по тангажу и крену, положения педалей для управления по рысканию, положения рычагов управления двигателей, а также с выходом датчика угловых скоростей, а ее выход каналом цифровой связи - с основной вычислительной подсистемой и через блок управления приводов газодинамических органов - со входами приводов газодинамических органов управления; вход вычислителя высотно-скоростных параметров соединен с выходами датчиков углов атаки и скольжения и с выходом датчика статического и динамического давлений, а его выход с помощью каналов цифровой связи - с основной и дополняющей вычислительными подсистемами; при этом регулируемые сопла выполнены с подвижными сверхзвуковыми створками, которые соединены с приводами газодинамических органов.
При этом каналы цифровой связи, обеспечивающие соединение дополняющей вычислительной подсистемы с основной, с вычислителем высотно-скоростных параметров и с блоком управления приводов газодинамических органов, выполнены с возможностью прохождения сигналов в обоих направлениях.
Кроме того, вход дополняющей вычислительной подсистемы связан с навигационной системой самолета и с системой управления двигателей.
Кроме этого, датчики положения ручки управления по тангажу и крену, положения педалей для управления по рысканию и положения рычагов управления правого и левого двигателей механически связаны с ручкой управления самолетом, педалями, рычагами управления правого и левого двигателей и электрически - с вычислительной системой.
Причем вход дополняющей вычислительной подсистемы соединен с выходом датчиков угловых скоростей каналом цифровой связи.
Подвижные сверхзвуковые створки каждого из регулируемых сопел соединены посредством выходных штоков с тремя приводами газодинамических органов.
При этом регулируемые сопла в критической части выполнены с управляющим кольцом, соединенным с возможностью фиксации на оси сопла с каждым из выходных штоков приводов газодинамических органов.
Кроме того, аэродинамические органы управления содержат стабилизатор, элероны и рули направления.
Вход основной вычислительной подсистемы связан с выходами датчиков обратной связи рулевых приводов аэродинамических органов, а выход блока управления приводов газодинамических органов соединен со входами приводов газодинамических органов, которые через выходные штоки связаны с датчиками обратной связи приводов газодинамических органов, выходы которых соединены со входом блока управления приводов газодинамических органов.
Кроме этого, цифровая вычислительная система выполнена четырехкратнорезервированной.
Технический результат, обеспечиваемый приведенной совокупностью существенных признаков, состоит:
- в увеличении маневренности и безопасности управления на больших углах атаки, включая закритические (α>30°), и скоростях полета, близких к нулевым, за счет улучшения устойчивости и управляемости самолета посредством многоосевого регулирования вектора тяги двигателей в дополнение к аэродинамическому управлению с возможностью получения независимого управления самолетом по каждому из каналов, что исключает попадание самолета на режимы сваливания и штопора, уменьшает геометрическое пространство маневра и позволяет сохранить плоскость выполнения маневра неизменной и полностью управляемой в процессе выполнения всего маневра.
Повышение безопасности полета за счет исключения попадания самолета на режимы сваливания и штопора, уменьшения геометрического пространства маневра и возможности маневрировать на скоростях полета ниже эволютивных (околонулевых), повышение боевой эффективности за счет быстрого разворота оси оружия на цель с возможностью опережения в пуске ракеты и расширения самой зоны возможных пусков обеспечивается за счет того, что аэродинамическое управление на больших углах атаки и малых скоростях полета дополняется газодинамическим, причем благодаря многоосевому регулированию вектора тяги обеспечивается независимое, «развязанное» управление по всем осям самолета, т.е. каналам тангажа, крена и рыскания.
Другими техническими результатами являются:
- обеспечение постоянства максимальной величины отклонения вектора тяги на каждом из режимов работы двигателя в зависимости от его приемистости;
- построение динамической коррекции характеристик рулевых приводов газодинамических органов и схемы синхронизации движения трех управляющих приводов газодинамических органов для отклонения вектора тяги с требуемой точностью и отсутствием паразитных перекрестных моментов;
- проведение в полете оценки текущей эффективности тяги двигателя для сохранения постоянства градиента газодинамического управления по режимам полета;
- построение управления самолета на закритических углах атаки вокруг вектора скорости с компенсациями гироскопической, весовой и инерционной составляющих движения самолета для поддержания траектории полета и сохранения плоскости выполнения маневра неизменной;
- повышение надежности за счет резервирования электромеханической части управления двигателя и четырехкратнорезервированной цифровой управляющей части.
Это позволяет не только «развязать» оси движения при управлении, но и при выполнении фигур высшего пилотажа или воздушной акробатики сохранить плоскость управления неизменной и полностью управляемой, а, следовательно, на закритических углах атаки получить полностью управляемый самолет, что позволяет уверенно говорить о дальнейшем его боевом применении, целью которого является быстрый разворот оси оружия на цель.
Изобретения поясняются чертежами, где изображено:
на фиг.1 - функциональная блок-схема системы управления самолетом;
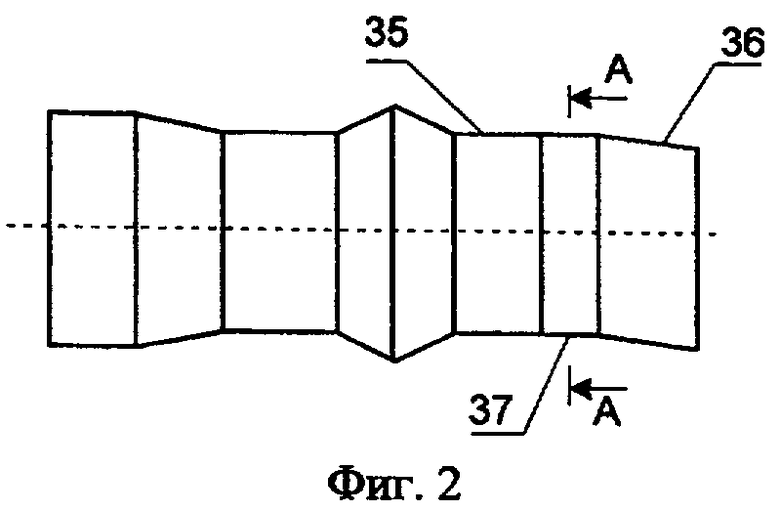
на фиг.2 - регулируемое сопло с отклоняемыми сверхзвуковыми створками;
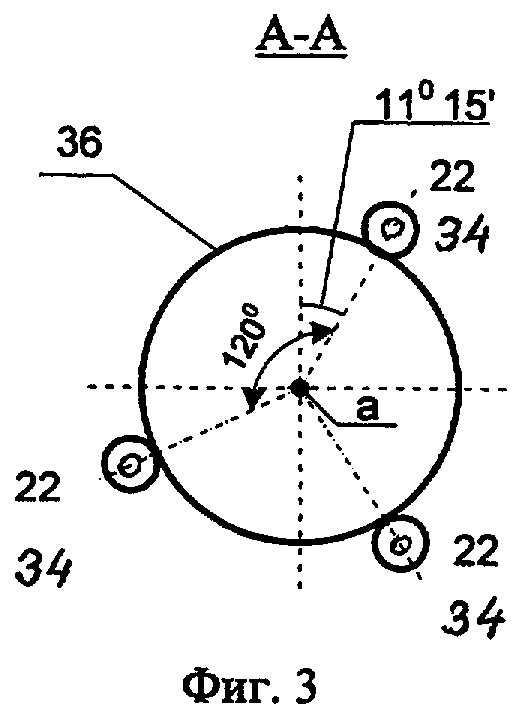
на фиг.3 - сечение А-А фиг.2;
на фиг.4 - условия включения дополняющей вычислительной подсистемы;
на фиг.5 - условия выключения дополняющей вычислительной подсистемы;
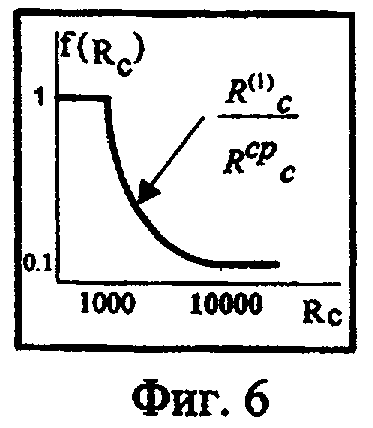
на фиг.6 - условия оценки текущей эффективности тяги правого и левого двигателей;
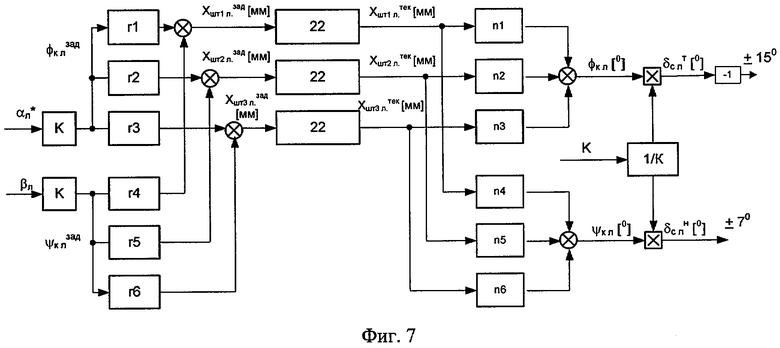
на фиг.7 - схема прямого и обратного пересчета углов отклонения створок в перемещения выходных штоков гидроприводов.
Система управления двухдвигательным самолетом содержит аэродинамические органы управления: стабилизатор 25, элероны 26 и рули направления 27 (фиг.1), а также газодинамические органы управления - регулируемые сопла 35 (фиг.2) с отклоняемым вектором тяги правого и левого двигателей, управляемые приводами 22 газодинамических органов.
Регулируемые сопла 35 в системе управления самолетом соединены с функциональными блоками, включающими вычислительную систему 28 управления аэродинамическими и газодинамическими органами и датчики параметров полета 9, 10, 11, 12, 13 и 14.
Вычислительная система 28 (фиг.1) выполнена цифровой и состоит из четырех функционально независимых блоков: двух вычислительных подсистем, основной 15 и дополняющей 16, вычислителя высотно-скоростных параметров 17 и блока управления 18 приводов газодинамических органов, соединенных между собой каналами цифровой связи 29, 30 и 31 для обмена информацией по параметрам полета (фиг.1).
При этом основная вычислительная подсистема 15 образует тракт дистанционного управления аэродинамическими органами, связанный с рулевыми приводами 19, 20, 21 аэродинамических органов, стабилизатора 25, элеронов 26 и рулей высоты 27, соответственно. А дополняющая вычислительная подсистема 16 образует тракт отклонения вектора тяги, связанный с приводами 22 газодинамических органов.
Обе вычислительные подсистемы 15 и 16 соединены между собой цифровым каналом связи 29 для обмена информации по параметрам полета. При этом через каналы цифровой связи 29 и 30 обе вычислительные подсистемы 15 и 16 имеют связь с вычислителем высотно-скоростных параметров 17, который, в свою очередь, через канал цифровой связи 30 соединен с дополняющей подсистемой 16, а через канал цифровой связи 29 - с основной вычислительной подсистемой 15. Таким образом, дополняющая вычислительная подсистема 16 образует тракт отклонения вектора тяги, связанный посредством своего канала цифрового связи 31 через блок управления 18 приводов газодинамических органов с приводами 22 газодинамических органов. Каналы цифровой связи 29, 30 и 31, обеспечивающие соединение дополняющей вычислительной подсистемы 16, соответственно, с основной вычислительной подсистемой 15, с вычислителем высотно-скоростных параметров 17 и с блоком управления 18 приводов газодинамических органов, выполнены с возможностью прохождения сигналов в обоих направлениях, создавая таким образом общее информационное поле для функциональных блоков вычислительной системы 28.
Система управления также содержит датчики параметров полета, такие как датчики углов атаки 14 и скольжения 13, нормальной 11 и боковой 12 перегрузок, угловых скоростей 10, статического и динамического давлений 9.
Кроме этого, система управления содержит пост управления летчика 1 с механизмом триммерного эффекта 2, загрузочным механизмом 3, ручкой 4 управления самолетом, педалями 5 и рычагами управления 7 двигателей, правого и левого. Пост управления летчика также содержит датчики положения ручки управления по тангажу 6.1 и крену 6.2, датчик положения педалей для управления по рысканию 6.3 и датчики положения рычагов управления 8 правым и левым двигателями.
При этом ручка 4 управления самолетом механически связана с датчиками положения ручки управления по тангажу 6.1 и по крену 6.2, педали 5 механически связаны с датчиком положения педалей для управления по рысканию 6.3, а рычаги управления двигателями 7 - с датчиками положения рычагов управления 8 правым и левым двигателями, которые, в свою очередь, электрически связаны с вычислительной системой 28. Датчики параметров полета, в том числе датчики углов атаки 14, скольжения 13, нормальной 11 и боковой 12 перегрузок, угловых скоростей 10, а также датчики высотно-скоростных параметров, представляющий собой датчики статического и динамического давлений 9, также связаны с вычислительной системой 28.
При этом в тракте дистанционного управления аэродинамическими органами вход основной вычислительной подсистемы 15 вычислительной системы 28 соединен с выходами датчиков положения ручки по тангажу 6.1 и крену 6.2, с выходами датчиков углов атаки 14 и скольжения 13, нормальной 11 и боковой 12 перегрузок, с выходом дополняющей вычислительной подсистемы 16 для получения сигналов от датчиков угловых скоростей 10 и положения педалей 6.3 по каналу цифровой связи 29, а ее выход - со входами рулевых приводов 19, 20 и 21 аэродинамических органов управления, соответственно, стабилизатора 25, элеронов 26 и рулей направления 27, которые, в свою очередь, посредством выходов датчиков обратной связи 24 связаны со входом основной вычислительной подсистемы 15.
В тракте отклонения вектора тяги вход дополняющей вычислительной подсистемы 16 соединен с выходами датчиков: положения ручки управления по тангажу 6.1 и крену 6.2, положения педалей для управления по рысканию 6.3, положения рычагов управления 8 правым и левым двигателями и датчиком угловых скоростей 10, а ее выход через блок управления 18 приводов газодинамических органов - со входами приводов 22 газодинамических органов. Кроме этого, вход дополняющей вычислительной подсистемы 16 связан с навигационной системой 32 самолета и с системой управления двигателей 33.
Вход вычислителя высотно-скоростных параметров 17 соединен с выходами датчиков углов атаки 14 и скольжения 13, статического и динамического давлений 9, а его выход с помощью каналов цифровой связи 29 и 30 соединен с основной 15 и дополняющей 16 вычислительными подсистемами.
Регулируемые сопла 35 в тракте отклонения вектора тяги посредством приводов 22 газодинамических органов через датчики обратной связи 23 соединены с блоком управления 18 приводов газодинамических органов, одним из четырех функциональных блоков вычислительной системы 28. При этом вход блока управления 18 соединен с выходами датчиков обратной связи 23 приводов газодинамических органов, которые, в свою очередь, взаимодействуют с выходными штоками 34 приводов 22 газодинамических органов. А выход блока управления 18 соединен со входами приводов 22 газодинамических органов.
Для повышения надежности цифровая вычислительная система 28 выполнена четырехкратнорезервированной.
Регулируемые сопла 35 (фиг.2, 3) правого и левого двигателей выполнены с подвижными сверхзвуковыми створками 36. Подвижные сверхзвуковые створки 36 каждого из регулируемых сопел 35 соединены посредством выходных штоков 34 с тремя приводами 22 газодинамических органов.
Регулируемые сопла 35 в критической части выполнены с управляющим кольцом 37, соединенным с возможностью фиксации на оси сопла с каждым из выходных штоков приводов 22 газодинамических органов.
Система управления, с помощью которой реализуется заявляемый способ, работает следующим образом.
Управляющие сигналы с поста управления 1 летчика поступают на аэродинамические органы 25, 26, 27 и газодинамические органы - регулируемые сопла 35, которые обеспечивают управление вектором тяги.
Обработку и формирование управляющих сигналов производят в вычислительной системе 28.
При этом управляющие сигналы с поста управления летчика 1 разделяют на два тракта (фиг.1) - тракт дистанционного управления аэродинамическими органами (ДУ АО) и тракт отклонения вектора тяги (ОВТ), и подают в вычислительную систему 28, разделенную на две функциональные вычислительные подсистемы, основную 15 и дополняющую 16. Обе вычислительные подсистемы работают в общем информационном поле, а в части выхода на органы управления - параллельно и независимо одна от другой, каждая по своим алгоритмам. Основная вычислительная подсистема 15 работает в тракте ДУ АО, а дополняющая 16 - в тракте ОВТ.
Разделенные на два тракта сигналы поступают, первые - в основную 15, а вторые -в дополняющую 16 вычислительные подсистемы.
В основной вычислительной подсистеме 15, во всем диапазоне высот и скоростей полета, производят обработку и формирование управляющих сигналов тракта ДУ АО, идущих на рулевые приводы аэродинамических органов 19, 20, 21. При этом осуществляется воздействие на такие параметры полета, как угловые скорости ωz, ωу, ωх, углы атаки α и скольжения β, нормальная nу и боковая nz перегрузки, изменяя и поддерживая их в допустимых пределах, а также на параметры изменения траектории полета, такие как углы тангажа, крена и рыскания, скорость и высота полета.
При малых скоростях полета и больших углах атаки в работу включают дополняющую вычислительную подсистему 16, в которой производят обработку и формирование управляющих сигналов тракта ОВТ, идущих на приводы 22 газодинамических органов, обеспечивающих требуемое отклонение вектора тяги. При этом дополняющую вычислительную подсистему включают в работу (см. фиг.4), на скоростях полета qcж≤150 кг/см2, независимо от текущего значения угла атаки α, а при qсж>150 кг/см2 - в диапазоне углов атаки α от 15° до 20°, где qcж - сжимаемый скоростной напор; на углах атаки α свыше 20° дополняющая вычислительная подсистема работает независимо от скорости полета. При скорости полета Vпp≥600 км/ч, дополняющую вычислительную подсистему отключают (см. фиг.5), где Vпp - приборная скорость полета.
Требуемое отклонение вектора тяги осуществляют в зависимости от получаемой в полете оценки текущей эффективности тяги правого и левого двигателей (см. фиг.6), согласно которой оценка текущей эффективности тяги правого и левого двигателей определяется по текущему осредненному положению рычагов управления двигателей 7 для каждого из двигателей и интерполяцией уравнений, полученных из высотно-скоростных характеристик двигателя, в зависимости от числа М, высоты полета и угла атаки. Чем больше текущая эффективность тяги двигателей, тем меньшее отклонение сопла требуется для сохранения характеристик управляемости самолета на различных режимах полета. На фиг.6 изображена относительная зависимость расчетной средней величины тяги двигателя (Rср c). В полете определяется расчетная тяга для каждого двигателя, левого и правого Rл и Rп; средняя расчетная величина тяги двигателей Rср=Rл+Rп/2 и текущая расчетная тяга R(1) с.
Так как отклонение вектора тяги зависит от диаметра критического сечения каждого регулируемого сопла, то оно должно корректироваться по режиму работы двигателя, определяемому углом отклонения насоса-регулятора или положением рычагов управления 7 двигателей, расположенных в кабине летчика, с которыми входная качалка каждого насоса-регулятора жестко связана. Следовательно, для обеспечения постоянства отклонения вектора тяги на каждом из режимов работы двигателя (дроссельном, максимале, форсаже) необходимо изменять входные сигналы на каждый привод, регулируя, таким образом, его ход. Поэтому требуемое отклонение вектора тяги осуществляют с учетом режима работы каждого двигателя, изменяя при этом входные сигналы на каждый привод 22 газодинамических органов в зависимости от диаметра критической части регулируемого сопла 35 и приемистости двигателя.
При этом в каждой из вычислительных подсистем 15 и 16 сигналы по тангажу, крену и рысканию суммируют с сигналами от датчиков параметров полета, которые используют как обратную связь для улучшения характеристик устойчивости и управляемости полетом (см. фиг.1).
В качестве обратных связей для сигналов, поступающих в основную вычислительную подсистему 15, используют сигналы, поступающие от датчиков угловых скоростей 10, углов атаки 14 и скольжения 13, нормальной 11 и боковой 12 перегрузок.
При этом сигналы от датчика угловых скоростей 10, используемые в качестве обратной связи в основной вычислительной подсистеме 15, поступают в нее по каналу цифровой связи 29 из дополняющей вычислительной подсистемы 16.
Для сигналов, поступающих в дополняющую вычислительную подсистему 16, в качестве обратной связи используют сигналы, поступающие от датчиков угловых скоростей 10, углов атаки 14 и скольжения 13.
При этом сигналы от датчиков углов атаки 14 и скольжения 13, используемые в качестве обратной связи в дополняющей вычислительной подсистеме, поступают в нее по каналу цифровой связи 30 из вычислителя высотно-скоростных параметров 17 после фильтрации и преобразования в истинные значения углов атаки и скольжения самолета. Для этого в вычислителе высотно-скоростных параметров 17, получая первоначальную информацию от датчика статического и динамического давлений 9, вычисляют не только значения числа М, но и значения истинной и приборной скорости полета, высоты и истинного значения скоростного напора.
Кроме этого, сигналы по тангажу, крену и рысканию, поступающие в дополняющую вычислительную подсистему 16, суммируют в ней с сигналами компенсации весовой составляющей, инерционного и гироскопического моментов для поддержания траектории полета и сохранения плоскости выполнения маневра неизменной, информация для формирования которых в дополняющую вычислительную подсистему 16 поступает из вычислителя высотно-скоростных параметров 17, навигационной системы самолета 32 и системы управления двигателей 33.
Формирование в дополняющей вычислительной подсистеме 16 сигналов компенсации весовой составляющей, инерционного и гироскопического моментов осуществляют в зависимости от проводимой в полете оценки текущей эффективности тяги правого и левого двигателей, тригонометрических зависимостей углов тангажа и крена самолета, моментов инерции и угловых скоростей роторов высокого и низкого давления правого и левого двигателей. Для этого в вычислителе высотно-скоростных параметров 17 из сигналов статического и динамического давлений формируются сигналы числа Маха, истинной воздушной скорости, высоты полета и истинного скоростного напора.
Все управляющие сигналы для каждого из органов управления корректируют по высотно-скоростным параметрам и углу атаки.
Сущность заявляемого способа заключается в следующем.
Посредством основной вычислительной подсистемы 15 летчик осуществляет отклонение аэродинамических органов управления, создавая управляющие моменты в тракте дистанционного управления аэродинамическими органами, изменяя угловые скорости, углы атаки и скольжения, продольную, нормальную и боковую перегрузки самолета (движение центра масс), тем самым изменяя траекторию полета в продольной и боковой плоскости (движение вокруг центра масс) вследствие изменения углов тангажа, крена и рыскания, вертикальной и горизонтальной скорости и высоты полета. В свою очередь, значения угловых скоростей, углов атаки и скольжения, нормальной и боковой перегрузок самолета, замеренные датчиками параметров полета, соответственно 10, 14, 13, 11 и 12, как отрицательная обратная связь, поступают в ту же вычислительную подсистему 15 для улучшения устойчивости и управляемости, формирования перекрестных связей, необходимых для управления на больших углах атаки, получения астатического ограничения допустимых углов атаки и нормальной перегрузки, обеспечения многофункционального автоматического и директорного управления, повышения комфортности и эффективности управления самолетом.
В целях увеличении маневренности и безопасности управления на больших углах атаки, включая закритические (α>30°), и скоростях полета, близких к нулевым, в дополнение к аэродинамическому управлению включается в работу дополняющая вычислительная подсистема 16 управления газодинамическими органами управления, позволяя поддерживать требуемое управление на режимах, где аэродинамическое управление становится недостаточно эффективным. При этом посредством тех же органов управления в кабине летчик осуществляет отклонение также и газодинамических органов управления, создавая дополнительные управляющие моменты, а в качестве обратных связей используются значения угловых скоростей, углов атаки и скольжения самолета, замеренные датчиками параметров полета, соответственно 10, 14 и 13. Кроме того, благодаря формированию в вычислителе высотно-скоростных параметров 17 из значений статического и динамического давлений, замеряемых соответствующими датчиками 9, сигналов числа Маха, истинной воздушной скорости, высоты полета и истинного скоростного напора, которые совместно с проводящейся в полете оценкой текущей эффективности тяги двигателя, вычислением тригонометрических функций углов тангажа и крена самолета, получаемым значениям моментов инерции и угловых скоростей роторов высокого и низкого давления правого и левого двигателей позволяют компенсировать гироскопическую, весовую и инерционную составляющую движения самолета, существенно повышая комфортность и точность пилотирования самолета.
Таким образом, обе вычислительные подсистемы 15 и 16 работают в общем информационном поле, а в части выхода на органы управления - совместно и независимо одна от другой, каждая по своим алгоритмам. При этом управление самолетом осуществляют за счет совместного функционирования аэродинамических и газодинамических органов, создавая управляющие моменты в продольной, поперечной и горизонтальной плоскостях самолета и реализуя независимое («развязанное») управление по каналам тангажа, рыскания и крена.
Формирование требуемого отклонения вектора тяги для создания управляющих моментов по тангажу, крену и рысканию осуществляют посредством отклонения регулируемых сопел 35 приводами 22 газодинамических органов.
При этом отклонение вектора тяги обеспечивают за счет отклонения сверхзвуковых створок регулируемого сопла 35 каждого двигателя тремя приводами 22 газодинамических органов посредством перемещения их выходных штоков 34.
Для перемещения выходных штоков 34, управляющих сверхзвуковыми створками 36 сопел 35, производят разложение вектора тяги каждого двигателя в двух плоскостях, вертикальной и горизонтальной, на составляющие по ходу движения выходного штока каждого привода 22. Вследствие невозможности замера на самолете фактических углов отклонения вектора тяги, затем проводят обратный пересчет от ходов штоков к отклонению вектора тяги в вертикальной и горизонтальной плоскостях двигателя (см. фиг.7). На фиг.7 изображено разложение вектора тяги каждого двигателя в двух плоскостях, вертикальной α и горизонтальной β с учетом приемистости двигателя, описываемой через функционал К, на составляющие по ходу движения выходного штока каждого привода 22. Например, при совместном отклонении вектора тяги в двух плоскостях заданное перемещение штока первого привода Хшт1 зад складывается из двух составляющих Хшт1 зад=Кr1 α+Кr4 β, таким же образом формируются заданные перемещения штока второго Хшт2 зад и третьего привода Хшт3 зад. Обратный пересчет производят по текущим перемещениям штоков соответственно первого Хшт1 тек, второго Хшт2 тек и третьего Хшт3 тек приводов.
При этом управление самолетом по каналу тангажа обеспечивают при совместном отклонении сверхзвуковых створок 36 регулируемого сопла каждого двигателя 35 в продольной плоскости самолета и отклонении стабилизатора 25; по каналу крена - при дифференциальном отклонении сверхзвуковых створок 36 регулируемого сопла каждого двигателя 35 в продольной плоскости и дифференциальном отклонении стабилизатора 25 и элеронов 26; по каналу рыскания - при совместном отклонении сверхзвуковых створок 36 сверхзвукового сопла каждого двигателя 35 в поперечной плоскости и отклонении рулей направления 27.
Синхронизацию движений приводов (см. фиг.2 и 3) газодинамических органов осуществляют с учетом положения центра (а) управляющего кольца 37 регулируемого сопла 35 каждого из двигателей, когда центр остается зафиксированным на оси сопла при перемещении выходного штока 34 каждого из приводов 22 газодинамических органов, а движение всех выходных штоков 34 приводов 22 начинается и заканчивается одновременно, что достигается ограничением сигналов, поступающих на вход приводов 22 газодинамических органов. Это обеспечивает исключение взаимовлияния каналов управления друг с другом.
Динамическую коррекцию движений приводов газодинамических органов для каждого регулируемого сопла осуществляют за счет дополнения механической обратной связи в приводах газодинамических органов электрической, получающей сигналы от значений положений выходных штоков каждого из приводов газодинамических органов и скорости их перемещения через датчики обратных связей 23 приводов 22 газодинамических органов.
Сформированные таким образом сигналы подают, первые - на вход рулевых приводов 19, 20 и 21 аэродинамических органов управления, а вторые через блок управления приводов газодинамических органов 18, в котором производят синхронизацию и динамическую коррекцию движений гидроприводов, - на вход приводов 22 газодинамических органов (см. фиг.1).
Пример конкретной реализации заявляемого способа
В продольном канале управления летчик отклоняет ручку управления 4 по тангажу, что замеряется датчиком положения ручки управления по тангажу 6.1, и сигнал хода ручки управления по тангажу  поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Pст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9, и по каналам цифровой связи 30 и 29 передающихся от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16, далее он поступает на вход рулевых приводов 19 стабилизатора. Под действием отклонения стабилизатора 25 самолет изменяет угловую скорость тангажа (ωZ), которая замеряется датчиком угловой скорости тангажа 10, нормальную перегрузку (nу), которая замеряется датчиком нормальной перегрузки 11, и угол атаки (α), который замеряется датчиком угла атаки 14. Замеренные сигналы поступают в основную вычислительную подсистему 15, где также корректируется по сигналам статического (Pст) и динамического (Pдин) давлений, суммируются между собой и в качестве отрицательной обратной связи суммируются с сигналом хода ручки управления 4 по тангажу , тем самым, останавливая избыточное отклонение стабилизатора 25. Отклонение стабилизатора 25 замеряется датчиками 24 обратной связи рулевых приводов стабилизатора, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15.
поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Pст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9, и по каналам цифровой связи 30 и 29 передающихся от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16, далее он поступает на вход рулевых приводов 19 стабилизатора. Под действием отклонения стабилизатора 25 самолет изменяет угловую скорость тангажа (ωZ), которая замеряется датчиком угловой скорости тангажа 10, нормальную перегрузку (nу), которая замеряется датчиком нормальной перегрузки 11, и угол атаки (α), который замеряется датчиком угла атаки 14. Замеренные сигналы поступают в основную вычислительную подсистему 15, где также корректируется по сигналам статического (Pст) и динамического (Pдин) давлений, суммируются между собой и в качестве отрицательной обратной связи суммируются с сигналом хода ручки управления 4 по тангажу , тем самым, останавливая избыточное отклонение стабилизатора 25. Отклонение стабилизатора 25 замеряется датчиками 24 обратной связи рулевых приводов стабилизатора, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15.
Сигнал хода ручки управления по тангажу поступает также и в дополняющую вычислительную подсистему 16 и через блок управления 18 приводов газодинамических органов перемещает приводы 22, отклоняя газодинамические органы 35 в вертикальной плоскости. Это отклонение замеряется датчиками обратной связи 23 приводов газодинамических органов, сигнал с которых поступает на соответствующие входы дополняющей вычислительной подсистемы 16. При этом сигналы по изменению угловой скорости тангажа (ωZ), которая замеряется датчиком угловой скорости тангажа 10, и угла атаки (α), который замеряется датчиком угла атаки 14, поступают в дополняющую вычислительную подсистему 16 в качестве обратной связи, где сигнал угла атаки корректируется в функции угла атаки.
Аналогичным образом, в канале поперечного управления летчик отклоняет ручку управления 4 по крену, что замеряется датчиком положения ручки управления по крену 6.2, и сигнал хода ручки управления по крену  поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Pст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9, и по каналам цифровой связи 30 и 29 передающихся от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16. Далее он поступает на вход рулевых приводов 20 элеронов и 19 стабилизатора для дифференциального отклонения элеронов 26 и стабилизатора 25. Под действием отклонения элеронов 26 и дифференциального отклонения стабилизатора 25 самолет изменяет угловую скорость крена (ωx), которая замеряется датчиком угловой скорости крена 10. Замеренный сигнал поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, и в качестве отрицательной обратной связи суммируется с сигналом хода ручки управления по крену , тем самым останавливая избыточное отклонение элеронов 26 и стабилизатора 25. Отклонение стабилизатора 25 замеряется датчиками обратной связи 24 рулевых приводов стабилизатора, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15. Соответственно и отклонение элеронов 26 замеряется датчиками обратной связи 24 рулевых приводов элеронов, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15.
поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Pст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9, и по каналам цифровой связи 30 и 29 передающихся от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16. Далее он поступает на вход рулевых приводов 20 элеронов и 19 стабилизатора для дифференциального отклонения элеронов 26 и стабилизатора 25. Под действием отклонения элеронов 26 и дифференциального отклонения стабилизатора 25 самолет изменяет угловую скорость крена (ωx), которая замеряется датчиком угловой скорости крена 10. Замеренный сигнал поступает в основную вычислительную подсистему 15, где корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, и в качестве отрицательной обратной связи суммируется с сигналом хода ручки управления по крену , тем самым останавливая избыточное отклонение элеронов 26 и стабилизатора 25. Отклонение стабилизатора 25 замеряется датчиками обратной связи 24 рулевых приводов стабилизатора, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15. Соответственно и отклонение элеронов 26 замеряется датчиками обратной связи 24 рулевых приводов элеронов, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15.
Сигнал хода ручки управления 4 по крену поступает также и в дополняющую вычислительную подсистему 16, где он корректируется через тригонометрические функции угла атаки и в качестве прямой и перекрестной связи через блок управления 18 перемещает приводы 22 газодинамических органов, дифференциально отклоняя газодинамические органы (сверхзвуковые створки 36 регулируемых сопел 35) в вертикальной плоскости для управления по каналу крена и в горизонтальной плоскости для управления по каналу рыскания. Это отклонение замеряется датчиками обратной связи 23 приводов газодинамических органов, сигнал с которых поступает на соответствующие входы дополняющей вычислительной подсистемы 16. При этом изменение угловой скорости крена (ωx) и рыскания (ωy), которые замеряются датчиками угловой скорости крена и рыскания 10, поступают в дополняющую вычислительную подсистему 16 в качестве обратной связи, где сигналы угловых скоростей посредством тригонометрических функций угла атаки переводятся из связанной системы координат в полусвязанную для управления не вокруг продольной оси самолета, чего на больших углах атаки не позволяет осуществить эффективность управляющих органов, а вокруг вектора скорости. Затем их сумма в качестве отрицательной обратной связи складывается с сигналом хода ручки 4 управления по крену  тем самым останавливая избыточное отклонение газодинамических органов управления.
тем самым останавливая избыточное отклонение газодинамических органов управления.
В канале управления по курсу летчик отклоняет педали 5, что замеряется датчиком положения педалей 6.3, и сигнал хода педалей (Xn) поступает в основную вычислительную подсистему 15, где он корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9, и по цифровым линиям связи 30 и 29 передается от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную подсистему 16. Далее он поступает на вход рулевых приводов 21 рулей направления. Под действием отклонения рулей направления 27 самолет изменяет угловую скорость рыскания (ωу), которая замеряется датчиком угловой скорости рыскания 10, боковую перегрузку (nZ), которая замеряется датчиком боковой перегрузки 12, и угол скольжения (β), который замеряется датчиком угла скольжения 13. Замеренные сигналы поступают в основную вычислительную подсистему 15, где также корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, суммируются между собой и в качестве отрицательной обратной связи суммируются с сигналом хода педалей (Xn), тем самым останавливая избыточное отклонение рулей направления 27. Отклонение рулей направления 27 замеряется датчиками обратной связи 24 рулевых приводов рулей направления, сигнал с которых поступает на соответствующие входы основной вычислительной подсистемы 15.
Кроме того, для реализации перекрестных связей в канале управления по курсу в основной вычислительной подсистеме 15 с сигналами управления, перечисленными выше, суммируются сигналы хода ручки управления по крену  и угловой скорости крена (ωx) которые корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9 и передаваемых по каналам цифровой связи 30 и 29 от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16, а также по сигналу угла атаки (α), который замеряется датчиком угла атаки 14.
и угловой скорости крена (ωx) которые корректируется по сигналам статического (Рст) и динамического (Рдин) давлений, замеряемых соответственно датчиком статического и динамического давлений 9 и передаваемых по каналам цифровой связи 30 и 29 от вычислителя высотно-скоростных параметров 17 через дополняющую вычислительную систему 16, а также по сигналу угла атаки (α), который замеряется датчиком угла атаки 14.
Сигнал хода педалей (Хn) поступает также и в дополняющую вычислительную подсистему 16 и через блок управления 18 перемещает приводы 22, отклоняя газодинамические органы в горизонтальной плоскости для управления по каналу рыскания. При этом изменение угловой скорости крена (ωx) и рыскания (ωy), которые замеряются датчиками угловой скорости крена и рыскания 10, поступают в дополняющую вычислительную подсистему 16 в качестве обратной связи, где сигналы угловых скоростей посредством тригонометрических функций угла атаки переводятся из связанной системы координат в полусвязанную, и их сумма в качестве отрицательной обратной связи суммируется с сигналом хода педалей  тем самым останавливая избыточное отклонение газодинамических органов управления (сверхзвуковых створок 36 регулируемых сопел 35).
тем самым останавливая избыточное отклонение газодинамических органов управления (сверхзвуковых створок 36 регулируемых сопел 35).
Для оценки текущей эффективности тяги правого и левого двигателей, а также обеспечения постоянства максимальной величины отклонения вектора тяги на каждом из режимов работы двигателя в зависимости от его приемистости в дополняющую вычислительную подсистему 16 поступают сигналы положения рычагов управления 7 соответственно правого  и левого
и левого  двигателей, которые замеряются датчиками положения органов управления двигателями 8.
двигателей, которые замеряются датчиками положения органов управления двигателями 8.
Оценка текущей эффективности тяги правого и левого двигателей определяется по текущему осредненному положению рычага управления двигателей 7 для каждого из двигателей и интерполяцией уравнений, полученных из высотно-скоростных характеристик двигателя, в зависимости от числа М, высоты полета и угла атаки.
При этом основная вычислительная подсистема аэродинамического управления выполняется с требуемой степенью резервирования и обеспечивает надежное функционирование системы управления с требуемыми характеристиками в основной области применения самолета. Дополняющая вычислительная подсистема газодинамического управления улучшает характеристики устойчивости и управляемости на больших углах атаки, исключает попадание самолета на режимы сваливания и штопора, улучшает маневренные характеристики за счет уменьшения геометрического пространства маневра и позволяет маневрировать на скоростях полета существенно ниже эволютивных (практически околонулевых).
Таким образом, заявляемый способ управления двухдвигательным самолетом и система управления для его реализации обеспечивают улучшение маневренных характеристик самолета при повышении безопасности полета и устойчивости самолета за счет многоосевого регулирования вектора тяги и сохранения плоскости выполнения маневра неизменной и полностью управляемой в процессе выполнения всего маневра, что дает возможность получить полноценное управление самолетом на закритических углах атаки и малых скоростях полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| САМОЛЕТ С ИЗМЕНЯЕМЫМ НАПРАВЛЕНИЕМ ВЕКТОРА ТЯГИ | 2008 |
|
RU2371352C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МАРШЕВЫХ ДВИГАТЕЛЕЙ САМОЛЕТА | 1998 |
|
RU2122510C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Система безопасности летательного аппарата вертикального взлета и посадки | 2019 |
|
RU2728451C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |

Изобретение относится к области автоматического управления. При управлении двухдвигательным самолетом управляющие сигналы с поста управления летчика поступают на аэродинамические органы управления самолета и газодинамические органы, представляющие собой регулируемые сопла, которые обеспечивают отклонение вектора тяги. Управляющие сигналы разделяют на два тракта: тракт дистанционного управления аэродинамическими органами и тракт отклонения вектора тяги, и подают в вычислительную систему, разделенную на две функциональные вычислительные подсистемы: основную и дополняющую. Дополняющую вычислительную подсистему включают в работу при малых скоростях полета и больших углах атаки. Система управления содержит цифровую вычислительную систему, состоящую из четырех функционально независимых блоков: двух вычислительных подсистем, основной и дополняющей, вычислителя высотно-скоростных параметров и блока управления приводов газодинамических органов, соединенных между собой каналами цифровой связи для обмена информацией по параметрам полета. Достигается улучшение маневренных характеристик самолета при повышении безопасности полета и устойчивости самолета за счет многоосевого регулирования вектора тяги. 2 н. и 23 з.п. ф-лы, 7 ил.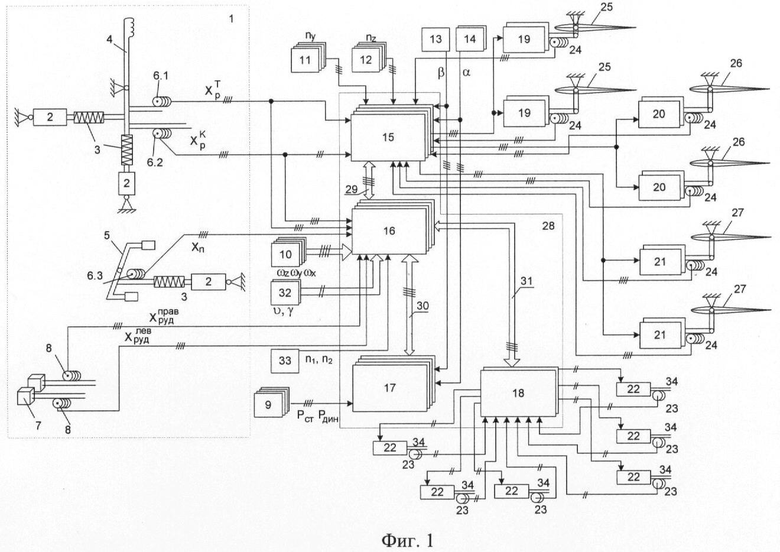
1. Способ управления двухдвигательным самолетом, согласно которому управляющие сигналы с поста управления летчика поступают на аэродинамические органы управления самолета и газодинамические органы управления, представляющие собой регулируемые сопла, которые обеспечивают отклонение вектора тяги, обработку и формирование управляющих сигналов производят в вычислительной системе, при этом управляющие сигналы для каждого из органов управления корректируют по высотно-скоростным параметрам и углу атаки, а формирование требуемого отклонения вектора тяги осуществляют посредством отклонения регулируемых сопел правого и левого двигателей приводами газодинамических органов, отличающийся тем, что управляющие сигналы с поста управления летчика разделяют на два тракта - тракт дистанционного управления аэродинамическими органами и тракт отклонения вектора тяги и подают в вычислительную систему, разделенную на две функциональные вычислительные подсистемы, основную и дополняющую, первые - в основную, а вторые - в дополняющую, в основной вычислительной подсистеме во всем диапазоне высот и скоростей полета производят обработку и формирование управляющих сигналов тракта дистанционного управления аэродинамическими органами, идущих на рулевые приводы аэродинамических органов, осуществляя воздействие на такие параметры полета, как угловые скорости, углы атаки и скольжения, нормальная и боковая перегрузки, изменяя и поддерживая их в допустимых пределах, а также на параметры изменения траектории полета, такие, как углы тангажа, крена и рыскания, скорость и высота полета при малых скоростях полета и больших углах атаки, в работу включают дополняющую вычислительную подсистему, в которой производят обработку и формирование управляющих сигналов тракта отклонения вектора тяги, идущих на приводы газодинамических органов, обе вычислительные подсистемы работают в общем информационном поле, а в части выхода на органы управления - совместно и независимо одна от другой, при этом управление самолетом осуществляют за счет совместного функционирования аэродинамических и газодинамических органов, создавая управляющие моменты в продольной, поперечной и горизонтальной плоскостях самолета и реализуя управление по каналам тангажа, рыскания и крена, при этом в каждой из вычислительных подсистем сигналы по тангажу, крену и рысканию суммируют с сигналами от датчиков параметров полета, которые используют как обратную связь для улучшения характеристик устойчивости и управляемости полетом, причем в качестве обратных связей для сигналов, поступающих в основную вычислительную подсистему, используют сигналы, поступающие от датчиков угловых скоростей, углов атаки скольжения, нормальной и боковой перегрузок, а для сигналов, поступающих в дополняющую вычислительную подсистему, используют сигналы, поступающие от датчиков угловых скоростей, углов атаки и скольжения, сформированные таким образом сигналы подают, первые - на вход рулевых приводов аэродинамических органов, а вторые через блок управления приводов газодинамических органов, в котором производят синхронизацию и динамическую коррекцию движений приводов газодинамических органов - на вход приводов газодинамических органов.
2. Способ управления по п.1, отличающийся тем, что дополняющую вычислительную подсистему включают в работу на скоростях полета qсж≤150 кг/см2 независимо от текущего значения угла атаки, а при qсж>150 кг/см2 - в диапазоне углов атаки от 15 до 20°, где qсж - сжимаемый скоростной напор на углах атаки свыше 20°, дополняющая вычислительная подсистема работает независимо от скорости полета.
3. Способ управления по п.1 или 2, отличающийся тем, что дополняющую вычислительную подсистему отключают при скорости полета Vпр≥600 км/ч, где Vпр - приборная скорость полета.
4. Способ управления по п.1 или 2, отличающийся тем, что требуемое отклонение вектора тяги осуществляют в зависимости от получаемой в полете оценки текущей эффективности тяги правого и левого двигателей.
5. Способ управления по п.1 или 2, отличающийся тем, что требуемое отклонение вектора тяги осуществляют с учетом режима работы каждого двигателя, изменяя при этом входные сигналы на каждый привод газодинамических органов в зависимости от диаметра критической части регулируемого сопла и приемистости двигателя.
6. Способ управления по п.1, отличающийся тем, что сигналы от датчика угловых скоростей, используемые в качестве обратной связи в основной вычислительной подсистеме, поступают в нее по каналу цифровой связи из дополняющей вычислительной подсистемы.
7. Способ управления по п.1, отличающийся тем, что сигналы от датчиков углов атаки и скольжения, используемые в качестве обратной связи в дополняющей вычислительной подсистеме, поступают в нее по каналу цифровой связи из вычислителя высотно-скоростных параметров после фильтрации и преобразования в истинные значения углов атаки и скольжения самолета.
8. Способ управления по п.1 или 7, отличающийся тем, что сигналы по тангажу, крену и рысканию, поступающие в дополняющую вычислительную подсистему, суммируют в ней с сигналами компенсации весовой составляющей, инерционного и гироскопического моментов, информация для формирования которых в дополняющую вычислительную подсистему поступает из вычислителя высотно-скоростных параметров, навигационной системы самолета и системы управления двигателей.
9. Способ управления по п.8, отличающийся тем, что формирование в дополняющей вычислительной подсистеме сигналов компенсации весовой составляющей, инерционного и гироскопического моментов осуществляют в зависимости от проводимой в полете оценки текущей эффективности тяги правого и левого двигателей, тригонометрических зависимостей углов тангажа и крена самолета, моментов инерции и угловых скоростей роторов высокого и низкого давления правого и левого двигателей, для этого в вычислителе высотно-скоростных параметров из сигналов статического и динамического давлений формируются сигналы числа Маха, истинной воздушной скорости, высоты полета и истинного скоростного напора.
10. Способ управления по п.1, отличающийся тем, что отклонение регулируемых сопел обеспечивают за счет отклонения сверхзвуковых створок регулируемого сопла каждого двигателя тремя приводами газодинамических органов посредством перемещения их выходных штоков.
11. Способ управления по п.10, отличающийся тем, что для перемещения выходных штоков, управляющих сверхзвуковыми створками сопел, в блоке управления приводов газодинамических органов производят разложение вектора тяги каждого двигателя в двух плоскостях, вертикальной и горизонтальной, на составляющие по ходу движения выходного штока каждого привода газодинамических органов, а затем проводят обратный пересчет от ходов штоков к отклонению вектора тяги в вертикальной и горизонтальной плоскостях двигателя.
12. Способ по пп.1, 10 или 11, отличающийся тем, что управление самолетом по каналу тангажа обеспечивают при совместном отклонении сверхзвуковых створок сопла каждого двигателя в продольной плоскости самолета и отклонении стабилизатора по каналу крена при дифференциальном отклонении сверхзвуковых створок сопла каждого двигателя в продольной плоскости и дифференциальном отклонении стабилизатора и элеронов по каналу рыскания при совместном отклонении сверхзвуковых створок сопла каждого двигателя в поперечной плоскости и отклонении рулей направления.
13. Способ управления по п.1 или 10, отличающийся тем, что синхронизацию движений приводов газодинамических органов осуществляют с учетом положения центра управляющего кольца регулируемого сопла каждого из двигателей, когда центр управляющего кольца остается зафиксированным на оси сопла при перемещении выходного штока каждого из приводов газодинамических органов, а движение всех выходных штоков приводов начинается и заканчивается одновременно, что достигается ограничением сигналов, поступающих на вход приводов газодинамических органов.
14. Способ управления по п.1 или 10, отличающийся тем, что динамическую коррекцию движений приводов газодинамических органов для каждого регулируемого сопла осуществляют за счет дополнения механической обратной связи в приводах газодинамических органов электрической, получающей сигналы от значений положений выходных штоков каждого из приводов газодинамических органов и скорости их перемещения через датчики обратных связей приводов газодинамических органов.
15. Система управления двухдвигательным самолетом, содержащая аэродинамические органы управления самолета и газодинамические органы, представляющие собой управляемые приводами газодинамических органов регулируемые сопла правого и левого двигателей с отклоняемым вектором тяги, соединенные с функциональными блоками, включающими вычислительную систему управления аэродинамическими и газодинамическими органами, датчики угла атаки и высотно-скоростных параметров, отличающаяся тем, что вычислительная система выполнена цифровой и состоит из четырех функционально независимых блоков: двух вычислительных подсистем, основной и дополняющей, вычислителя высотно-скоростных параметров и блока управления приводов газодинамических органов, соединенных между собой каналами цифровой связи для обмена информацией по параметрам полета, при этом основная вычислительная подсистема образует тракт дистанционного управления аэродинамическими органами, связанный с рулевыми приводами аэродинамических органов, а дополняющая - тракт отклонения вектора тяги, связанный с приводами газодинамических органов система управления, также дополнительно содержит датчики параметров полета, такие, как датчики угла скольжения, нормальной и боковой перегрузок, угловых скоростей, а в качестве датчика высотно-скоростных параметров - датчик статического и динамического давлений, кроме этого, система управления содержит ручку управления самолетом и датчики поста управления летчика: положения ручки управления по тангажу и крену, положения педалей для управления по рысканию и положения рычагов управления двигателями, правым и левым, при этом вход основной вычислительной подсистемы соединен с выходами датчиков положения ручки управления по тангажу и крену, с выходами датчиков углов атаки и скольжения, нормальной и боковой перегрузок, а также с выходом дополняющей вычислительной подсистемы для получения сигналов от датчиков угловых скоростей и положения педалей по каналу цифровой связи, а ее выход - со входами рулевых приводов аэродинамических органов управления, вход дополняющей вычислительной подсистемы соединен с выходами датчиков: положения ручки управления по тангажу и крену, положения педалей для управления по рысканию, положения рычагов управления правым и левым двигателями, а также с выходом датчика угловых скоростей, а ее выход каналом цифровой связи - с основной вычислительной подсистемой и через блок управления приводами газодинамических органов со входами приводов газодинамических органов управления, вход вычислителя высотно-скоростных параметров соединен с выходами датчиков углов атаки и скольжения и с выходом датчика статического и динамического давлений, а его выход с помощью каналов цифровой связи соединен с основной и дополняющей вычислительными подсистемами, при этом регулируемые сопла выполнены с подвижными сверхзвуковыми створками, которые соединены с приводами газодинамических органов.
16. Система управления по п.15, отличающаяся тем, что каналы цифровой связи, обеспечивающие соединение дополняющей вычислительной подсистемы с основной, с вычислителем высотно-скоростных параметров и с блоком управления приводов газодинамических органов, выполнены с возможностью прохождения сигналов в обоих направлениях.
17. Система управления по п.15, отличающаяся тем, что вход дополняющей вычислительной подсистемы связан с навигационной системой самолета и с системой управления двигателями.
18. Система управления по п.15, отличающаяся тем, что датчики положения ручки управления по тангажу и крену, положения педалей для управления по рысканию и положения рычагов управления двигателями механически связаны с ручкой управления самолетом, педалями и рычагами управления двигателями соответственно и электрически - с вычислительной системой.
19. Система управления по п.15, отличающаяся тем, что вход дополняющей вычислительной подсистемы соединен с выходом датчика угловых скоростей каналом цифровой связи.
20. Система управления по п.15, отличающаяся тем, что подвижные сверхзвуковые створки каждого из регулируемых сопел соединены посредством выходных штоков с тремя приводами газодинамических органов.
21. Система управления по п.15 или 20, отличающаяся тем, что регулируемые сопла в критической части выполнены с управляющим кольцом, соединенным с возможностью фиксации на оси сопла с каждым из выходных штоков приводов газодинамических органов.
22. Система управления по п.15, отличающаяся тем, что аэродинамические органы управления содержат стабилизатор, элероны и рули направления.
23. Система управления по п.15, отличающаяся тем, что вход основной вычислительной подсистемы связан с выходами датчиков обратной связи рулевых приводов аэродинамических органов.
24. Система управления по п.15, отличающаяся тем, что выход блока управления приводов газодинамических органов соединен со входами приводов газодинамических органов, которые через выходные штоки связаны с датчиками обратной связи приводов газодинамических органов, выходы которых соединены со входом блока управления приводов газодинамических органов.
25. Система управления по п.15, отличающаяся тем, что цифровая вычислительная система выполнена четырехкратно резервированной.
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ МАНЕВРЕННЫМ САМОЛЕТОМ | 1996 |
|
RU2099244C1 |
| ВЫСОКОСКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 1992 |
|
RU2065378C1 |
| DE 3244050 A1, 05.07.1984 | |||
| DE 3609457 A1, 25.09.1986 | |||
| DE 3903347 A1, 09.08.1990. | |||

