Область техники, к которой относится изобретение
Данное изобретение относится к устройству или прибору для измерения биологических жидкостей и, в частности, для измерения осаждения частиц в биологических жидкостях, в особенности для измерения скорости осаждения эритроцитов. Изобретение также относится к способу выполнения указанных измерений.
Уровень техники
Скорость осаждения эритроцитов измеряют в качестве части рутинных анализов, выполняемых с пробами крови. Этот анализ можно обычно выполнять с использованием пробирок или кюветок особой формы, подходящих для оптического считывания с помощью приемопередатчика, который скользит в осевом направлении вдоль пробирки. Пример пробирки, пригодной для этого применения, описан в ЕР-В-898700. Приборы, в которых используются специальные пробирки для измерения скорости осаждения эритроцитов, описаны в WO-A-9743621 и US-A-5133208.
Были также разработаны приборы, которые позволяют измерять скорость осаждения эритроцитов с использованием не специальных пробирок, а стандартных пробирок или кюветок, используемых для полного анализа крови или аналогичных анализов проб крови. Такие приборы предусматривают отсасывание части пробы крови, содержащейся в кюветке или пробирке для полного анализа крови, в капиллярную трубку. Затем измеряют скорость осаждения эритроцитов внутри капиллярной трубки. Эти приборы имеют преимущество использования единственного типа пробирок для различных рутинных анализов, включая скорость осаждения эритроцитов. Однако они имеют значительные недостатки, вытекающие из необходимости извлечения пробы крови из пробирки с помощью пипетки или капиллярной трубки, которые затем необходимо промывать или заменять между одним тестом и следующим тестом. Это включает создание жидких или твердых отходов, которые необходимо удалять, что увеличивает сложность прибора и соответствующую стоимость его использования, а также стоимость изготовления. Кроме того, имеется опасность загрязнения между последовательными анализами проб.
Сущность изобретения
Задачей изобретения является создание способа измерения скорости осаждения эритроцитов, который преодолевает или сокращает один или несколько указанных выше недостатков известных способов.
Другой задачей изобретения является создание нового устройства для измерения скорости осаждения эритроцитов.
В частности, задачей данного изобретения является создание аппарата или устройства, способного выполнять анализы с использованием либо специально предназначенных для измерения скорости осаждения эритроцитов пробирок, либо стандартных пробирок типа, обычно используемого для полного анализа крови.
Кроме того, согласно одному из вариантов выполнения задачей изобретения является измерение скорости осаждения эритроцитов в стандартных пробирках с использованием любого типа штатива для расположения их во время выполнения полного анализа крови.
По существу, согласно первому аспекту изобретение относится к способу выполнения анализов скорости осаждения эритроцитов, в котором пробу крови помещают в пробирку для полного анализа крови, который характеризуется тем, что после перемешивания указанную пробу сохраняют в пробирке (при этом пробирку предпочтительно удерживают в специальном штативе) в течение заданного времени осаждения, после чего выполняют автоматическое считывание пробы, удерживаемой в пробирке и штативе, например, с помощью видеокамеры, емкостного датчика или т.п. По существу изобретение включает измерение скорости осаждения эритроцитов в пробирке для полного анализа крови без извлечения пробы из пробирки. Когда пробирки помещают в штатив, то их можно обрабатывать внутри прибора без изымания из штатива. Пробирки, с которыми можно выполнять различные типы тестов и анализов, можно переводить из одного прибора в другой прибор (включая оборудование для измерения скорости осаждения эритроцитов) полностью автоматически, без необходимости извлечения каждой пробирки из штатива и без необходимости передачи порций пробы.
Согласно особенно предпочтительному варианту выполнения изобретения перед вычислением скорости осаждения эритроцитов автоматически выполняется проверка с помощью системы обнаружения, является ли пробирка, с которой подлежит выполнять тест, специальной пробиркой или пробиркой для стандартного полного анализа крови. Это позволяет автоматически вносить коррекцию или корреляцию в результаты измерения.
В действительности, как известно для специалистов в данной области техники, специальные пробирки для анализа скорости осаждения эритроцитов содержат особый антикоагулянт (цитрат натрия), отличающийся от антикоагулянта, используемого в пробирках для полного анализа крови (называемого K3EDTA). Два антикоагулянта оказывают различное влияние на поведение пробы крови во время осаждения. Протокол, относящийся к выполнению анализов скорости осаждения эритроцитов, настроен на использование цитрата натрия в качестве антикоагулянта в пробе крови. Когда проба содержит K3EDTA вместо цитрата натрия, то ее поведение изменяется, что влияет на результат измерения скорости осаждения эритроцитов. Таким образом, когда измеряют скорость осаждения эритроцитов на пробе, извлеченной из пробирки, содержащей K3EDTA в качестве антикоагулянта, то необходимо приспосабливать специальный алгоритм для коррекции результата измерения.
Поскольку способ согласно данному изобретению включает измерение скорости осаждения эритроцитов как в специальных пробирках для измерения скорости осаждения эритроцитов, так и пробирках, предназначенных для полного анализа крови, без извлечения пробы из пробирки, то это можно выполнять в машине, которая обрабатывает оба типа пробирок и выдает результаты для обоих типов. Поскольку антикоагулянт, содержащийся в двух пробирках, является различным, то необходимо иметь возможность устанавливать вручную или автоматически процесс обработки данных, полученных посредством считывания пробирок, с целью учета типа антикоагулянта, содержащегося в пробах. В предпочтительном варианте выполнения способа согласно изобретению тип пробирки обнаруживают автоматически, так что можно автоматизировать весь процесс измерения, без необходимости вмешательства оператора для задания типа подлежащего выполнению вычисления с данными, полученными в зависимости от используемого типа пробирки.
Согласно другому аспекту изобретение включает способ измерения скорости осаждения эритроцитов в пробе крови, содержащейся в пробирке, в котором пробу удерживают в пробирке в течение заданного времени после адекватного перемешивания; автоматическая система обнаружения подтверждает тип пробирки, в которой содержится проба; последовательно считывают скорость осаждения эритроцитов с помощью автоматической системы считывания, при этом регистрируемую величину обрабатывают в соответствии с типом пробирки, содержащей пробу.
Другие предпочтительные характеристики и варианты выполнения способа согласно изобретению указаны в прилагаемой формуле изобретения.
Согласно еще одному аспекту изобретение относится к устройству для выполнения анализов скорости осаждения эритроцитов в пробах крови, содержащихся внутри пробирок, содержащему блок управления и систему считывания пробирок, содержащих пробы, подлежащие анализу. Характерно, что считывающая система выполняет считывания пробы внутри соответствующей пробирки без извлечения пробы из пробирки, независимо от типа пробирки, в которой содержится проба, и без удаления пробирки из специального штатива, в котором она расположена.
Согласно предпочтительному варианту выполнения изобретения устройство включает управляющий блок, имеющий средство обнаружения для автоматического распознавания типа пробирки, в которой содержится проба, подлежащая анализу. Например, средство обнаружения может содержать видеокамеру, которая образует также систему считывания проб. С помощью подходящего программного обеспечения обработки изображения можно использовать видеокамеру, с одной стороны, для рассматривания и интерпретации содержимого пробирки, определения скорости осаждения эритроцитов пробы, и, с другой стороны, для различения одного типа пробирки от другого. Известно, что в действительности пробирки, предназначенные для определения скорости осаждения эритроцитов, имеют форму, отличную от пробирок для полного анализа крови. Различные изображения, снимаемые видеокамерой, можно обрабатывать с помощью способов обработки изображения для различения одного типа пробирок от другого.
В качестве альтернативного решения можно выполнить систему, в которой пробирки связаны с ретранслятором и предусмотрены средства обнаружения, сопряженные с управляющим блоком анализатора, которые опрашивают ретранслятор. Данные, содержащиеся в ретрансляторе, позволяют системе распознавать тип пробирки, загружаемой в каждый момент времени в анализатор.
В предпочтительном варианте выполнения изобретения устройство включает также средства для считывания штрихкода или другого читаемого машиной кода (например, слов с оптически распознаваемыми символами), прикрепленного к пробирке. Штрихкод или другой машинно-считываемый код содержит данные для идентификации лица, которому принадлежит проба, содержащаяся в пробирке, дополнительно к данным, используемым для анализа. В частности, поскольку устройство и способ согласно изобретению позволяют использовать пробирки, предназначенные для полного анализа крови, для измерения скорости осаждения эритроцитов, то предпочтительно предусмотреть, чтобы информация, содержащаяся в штрихкоде (или аналогичном коде) включала информацию, которая сообщала устройству, подлежит или нет данная пробирка анализу скорости осаждения эритроцитов. Действительно, пробирки для полного анализа крови могут содержать пробы, требующие лишь тестирования для полного анализа крови, но не скорости осаждения эритроцитов, в этом случае устройство может пропускать пробирку, для которой не требуется измерение скорости осаждения эритроцитов, и выполнять анализ следующей пробирки.
Когда система считывания проб предусматривает использование видеокамеры, то штрихкод (или аналогичный код), прикрепленный к пробирке, может считываться указанным прибором. И наоборот, система может предусматривать считывание скорости осаждения эритроцитов с помощью датчика другого типа, например, с использованием емкостных датчиков, нефелометрической оптики, инфракрасной оптики или не оптического ультразвука. В этом случае датчик для считывания скорости осаждения эритроцитов может быть соединен с устройством считывания штрихкода, таким как обычный лазерный сканер или прибор с зарядовой связью для считывания штрихкодов. Для других типов машинно-считываемых кодов можно использовать другие типы считывающих устройств, например, с использованием магнитного считывания вместо оптического считывания.
Для обеспечения считывания пробирок для полного анализа крови, к которым могут быть прикреплены этикетки для сообщения различных подробностей, относящихся к содержимому пробирки (в частности, когда система считывания содержит видеокамеру), то желательно снабдить прибор механизмом для поворота пробирок, содержащих подлежащие анализу пробы, с целью правильной ориентации пробирки относительно системы считывания (посредством ее поворота вокруг собственной оси). Указанная ориентация может служить обычной цели представления свободной зоны пробирки системе считывания пробы и/или представления системе для считывания штрихкода (или другого кода, читаемого системой), при этом этикетка содержит информацию, которую должна считывать система для правильного выполнения анализа и увязки результата с пациентом, проба которого содержится в данной пробирке.
Когда проба считывается емкостным датчиком, ультразвуковым или инфракрасным устройством, то угловая ориентация пробирки может служить лишь для расположения этикетки перед считывающим устройством для обеспечения ее считывания, в то время как скорость осаждения эритроцитов можно считывать через этикетку, поскольку на емкостной датчик не влияет ее присутствие.
В предпочтительном варианте выполнения устройство согласно изобретению содержит магазин для удерживания и встряхивания множества пробирок, зону осаждения, в которой пробирки оставляются в вертикальном или наклонном положении для обеспечения осаждения пробы, и зону считывания пробирок, в которой установлена считывающая система. В зоне считывания после заданного времени осаждения измеряется высота линии, отделяющей плазму от кровяных клеток, и сравнивается с полной высотой пробы. Скорость осаждения эритроцитов вычисляют известным образом из информации, которую можно регистрировать с помощью оптической системы видеокамеры или с помощью любой другой системы считывания, например, емкостного типа, как указывалось выше.
Согласно одному варианту выполнения изобретения магазин предпочтительно содержит первый гибкий конвейер с соответствующими гнездами для сцепления и удерживания штативов, содержащих пробирки, которые совместимы со всеми доступными типами штативов для пробирок измерения полного анализа крови и других. Этот гибкий конвейер выполнен и расположен так, чтобы гнезда для удерживания штативов, содержащих пробирки, последовательно проходили в следующие положения: положение загрузки штативов, положение перевода штативов в зону осаждения, положение для приема штативов из зоны считывания после считывания проб и положение выбрасывания обработанных штативов.
Предпочтительно конвейер, образующий магазин, движется по замкнутому пути, лежащему по существу в вертикальной плоскости. Таким образом, движение пробирок, удерживаемых в выполненном так магазине, вызывает встряхивание проб, которое выполняется внутри анализатора.
В одном возможном варианте выполнения устройство включает поддон, поддерживающий штативы с подлежащими обработке пробирками, при этом поддон расположен, например, горизонтально. Предусмотрен плунжер для собирания по отдельности единичных штативов в магазин.
В другом возможном варианте выполнения устройства согласно изобретению имеется второй гибкий конвейер, оборудованный множеством гнезд для штативов, содержащих подлежащие обработке пробирки, в зоне осаждения. Этот второй гибкий конвейер движется шагово для переноса отдельных штативов в зону считывания, куда они подаются из магазина. Время этого переноса предпочтительно одинаково со временем осаждения, так что когда они достигают зоны считывания, пробирки можно подвергать измерению скорости осаждения эритроцитов. Возможно также, что часть времени осаждения приходится на время пребывания пробирок в магазине.
Согласно предпочтительному варианту выполнения второй конвейер, предусмотренный в зоне осаждения, имеет по существу горизонтальный участок прямого пути, проходящий между положением, где штативы принимаются из магазина, и положением считывания. Этот участок прямого пути расположен по существу на той же высоте, что и соответствующий горизонтальный участок конвейера, образующего магазин. Таким образом, штативы, содержащие пробирки, можно переносить с одного конвейера на другой с помощью простого плунжера.
Другие предпочтительные характеристики и варианты выполнения устройства согласно изобретению следуют из прилагаемой формулы изобретения.
Описанные и показанные конструктивные и функциональные признаки устройства согласно изобретению могут быть также предпочтительно обеспечены в устройстве, которое измеряет скорость осаждения эритроцитов лишь в специально предназначенных для этого пробирках. Однако в этом случае нет необходимости в способности распознавания типа пробирки, представляемой для считывания, и/или в способности задавать параметры обработки регистрируемых данных в зависимости от типа пробирки и от типа антикоагулянта, содержащегося в ней.
Согласно другому аспекту изобретения предлагается устройство для измерения скорости осаждения эритроцитов в биологических жидкостях и, в частности, скорости осаждения эритроцитов в пробах крови, содержащее держатели для пробирок, содержащих пробы биологических жидкостей; встряхивающие устройства для встряхивания пробирок; по меньшей мере один детектор для считывания уровней проб или осадка внутри пробирок, которое характеризуется тем, что держатели предусмотрены в непрерывном гибком элементе, задающим замкнутый путь, вдоль которого расположены встряхивающие устройства и по меньшей мере один детектор.
Как следует из приведенного ниже описания, устройство этого типа можно использовать для вставления единичных пробирок (даже общих пробирок, используемых для полного анализа крови) в соответствующие держатели в гибком элементе, который перемещает пробирки вдоль пути, на котором они встряхиваются, с удерживанием в положении, обеспечивающем осаждение, и подвергаются одному или нескольким считываниям.
В предпочтительном варианте выполнения вдоль замкнутого пути, заданного гибким элементом, предусмотрены по меньшей мере одна зона встряхивания, в которой установлены встряхивающие устройства; по меньшей мере одна зона осаждения и по меньшей мере одна зона считывания, в которой установлен детектор. На практике могут быть предусмотрены по меньшей мере два детектора для выполнения первого считывания с целью определения уровня пробы после встряхивания и второго считывания с целью определения уровня осадка в пробе после осаждения. Может быть предусмотрено также несколько последовательных считываний на заданных пространственных расстояниях и, следовательно, с заданными интервалами времени (поскольку известна скорость движения гибкого элемента). Уровень пробы в пробирке можно также определять вне прибора или же один и тот же детектор может выполнять два считывания, в этом случае достаточно иметь один детектор для выполнения измерений. Однако с целью также автоматизации процесса анализа предпочтительно предусматривать по меньшей мере один детектор по потоку за зоной встряхивания и по меньшей мере один второй детектор по потоку за зоной осаждения.
Гибкий элемент предпочтительно задает путь, лежащий по существу в горизонтальной плоскости, так что пробирки или кюветки приходят по существу в вертикальное положение во время фазы осаждения и считывания. Однако они могут быть слегка наклонены относительно вертикали.
В практическом и предпочтительном варианте выполнения держатели, образованные непрерывным гибким элементом, состоят из соединенных друг с другом элементов с образованием гибкого цепного элемента, например, с помощью сферических шарниров, которые обеспечивают достаточное перемещение одного элемента относительно другого, с возможностью удаления единичной пробирки из плоскости, в которой лежит непрерывный гибкий элемент, для обеспечения эффективного встряхивания пробы.
Однако для обеспечения более эффективного встряхивания направляющие, входящие в зацепление с держателями, образующими гибкий элемент, и образующие часть встряхивающих устройств, являются подвижными направляющими, проходящими вдоль части пути, заданного гибким элементом. В этом случае направляющие выполнены и расположены так, что их движение вызывает колебания держателей, соединенных с ними, вне плоскости, в которой лежит непрерывный гибкий элемент. Таким образом, колебательное движение, вызываемое направляющими (снабженными, например, собственным исполнительным механизмом), не ограничивается и не зависит от подачи вперед гибкого элемента, несущего пробирки.
Например, встряхивающие устройства могут содержать ротор, коаксиальный участку пути, покрываемому гибким элементом, и имеющий элементы в виде направляющих или т.п., для вхождения в зацепление с держателями, которые приходят на линию указанного участка на пути гибкого элемента. Ротор совершает вращательное и/или колебательное движение вокруг своей собственной оси, которое вызывает колебания всех элементов и, следовательно, соответствующих гнезд или держателей и пробирок, находящихся в зацеплении с указанным ротором, относительно остальной части гибкого элемента, не находящегося в зацеплении с ним. Таким образом, каждая пробирка, оставаясь в своем держателе и проходя полный замкнутый путь, заданный непрерывным гибким элементом, может встряхиваться и затем оставляться в покое в вертикальном положении (или возможно даже с наклоном относительно вертикали, но с фиксированным углом) для завершения фазы осаждения и считывания уровней в пробирке.
Вне зоны встряхивания могут быть предусмотрены неподвижные направляющие для исключения любой вибрации или случайных колебаний пробирок.
Для обеспечения надежного управления устройством согласно улучшенному варианту выполнения изобретения непрерывный гибкий элемент включает ретранслятор, соединенный с каждым держателем. Ретранслятор содержит данные, которые обеспечивают распознавание каждого держателя, связанного с данной пробиркой, которая в свою очередь снабжена информацией, прикрепленной с помощью этикетки, например, со штрихкодом или другим предпочтительно машинно-считываемым кодом, например, с использованием системы считывания с оптическим распознаванием символов. Блок управления связывает данные в каждом ретрансляторе с данными пробирки, вставленной в соответствующий держатель. С помощью системы для сканирования ретрансляторов в одном или нескольких подходящих местах вдоль пути гибкого элемента можно идентифицировать положение каждой пробирки. Таким образом, устройство является чрезвычайно надежным и безошибочным, даже в случае временного отсутствия электропитания, которое может приводить к потере шаговой управляющей системой сопровождения положения различных пробирок вдоль пути, проходимого гибким элементом.
Пробирки можно вставлять и извлекать из держателей, образованных гибким элементом, вручную. Однако вдоль замкнутого пути, заданного гибким элементом, предпочтительно имеется по меньшей мере один экстрактор для удаления пробирок из держателей. В предпочтительном варианте выполнения изобретения предусмотрено два экстрактора для целей, описание которых будет приведено ниже.
В упрощенном, не полностью автоматизированном варианте выполнения устройства может быть предусмотрен оператор для расположения отдельных пробирок в различных гнездах в держателях, после получения блоком управления информации, прикрепленной к каждой пробирке.
Однако прибор можно дополнительно улучшить посредством предусмотрения автоматических манипуляторов для автоматического вставления пробирок в держатели, после автоматического считывания информации, прикрепленной к пробирке. Эти манипуляторы могут быть выполнены и расположены с возможностью сбора отдельных пробирок из штатива для пробирок и вставления их в соответствующие держатели. Эти манипуляторы могут быть расположены в задающем блоке для подготовки пробирок, который предпочтительно расположен над непрерывным гибким элементом и средствами для встряхивания пробирок и считывания скорости осаждения эритроцитов.
В одном возможном варианте выполнения задающий блок включает участок сканирования для автоматического считывания этикеток, нанесенных на пробирки, и определения для каждой пробирки, следует ли измерять скорость осаждения эритроцитов для содержащейся в ней пробы. Кроме того, могут быть предусмотрены механизмы для извлечения отдельных пробирок из соответствующих штативов и переноса и вставления их в держатели в расположенном снизу непрерывном гибком элементе.
Согласно еще одному аспекту изобретение относится к способу измерения скорости осаждения в биологических жидкостях и, в частности, скорости осаждения эритроцитов в пробах крови, содержащему стадию встряхивания пробирок, содержащих пробы биологических жидкостей; стадию осаждения проб; стадию считывания уровня осадка в пробирках, который характеризуется тем, что содержит вставление пробирок в соответствующие держатели, образующие непрерывный гибкий элемент; продвижение гибкого элемента по замкнутому пути и подвергание отдельных пробирок стадиям встряхивания, осаждения и считывания в зонах, расположенных последовательно вдоль замкнутого пути.
Другие признаки и варианты выполнения изобретения следуют из приведенного ниже описания и прилагаемой формулы изобретения.
Краткое описание чертежей
Для лучшего понимания изобретения ниже приводится его подробное описание со ссылками на прилагаемые чертежи, на которых показан не ограничивающий изобретение практический вариант его выполнения. В частности, на чертежах изображено:
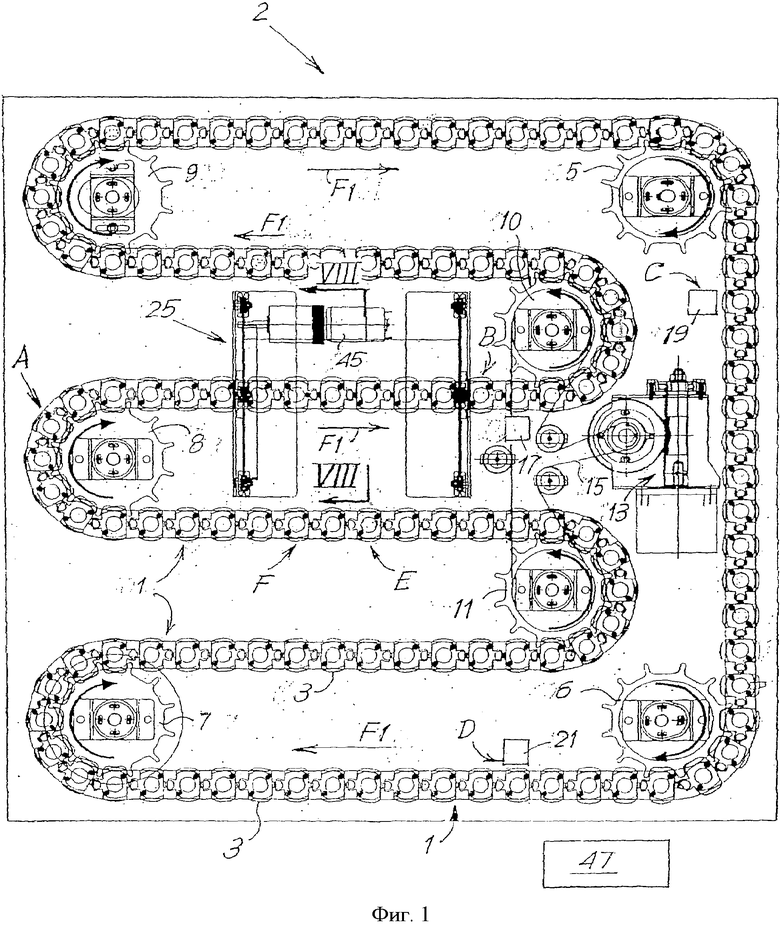
фиг.1 - вид по стрелкам I-I на фиг.12 гибкого элемента с его путем прохождения и элементами и устройствами, предусмотренными вдоль пути;
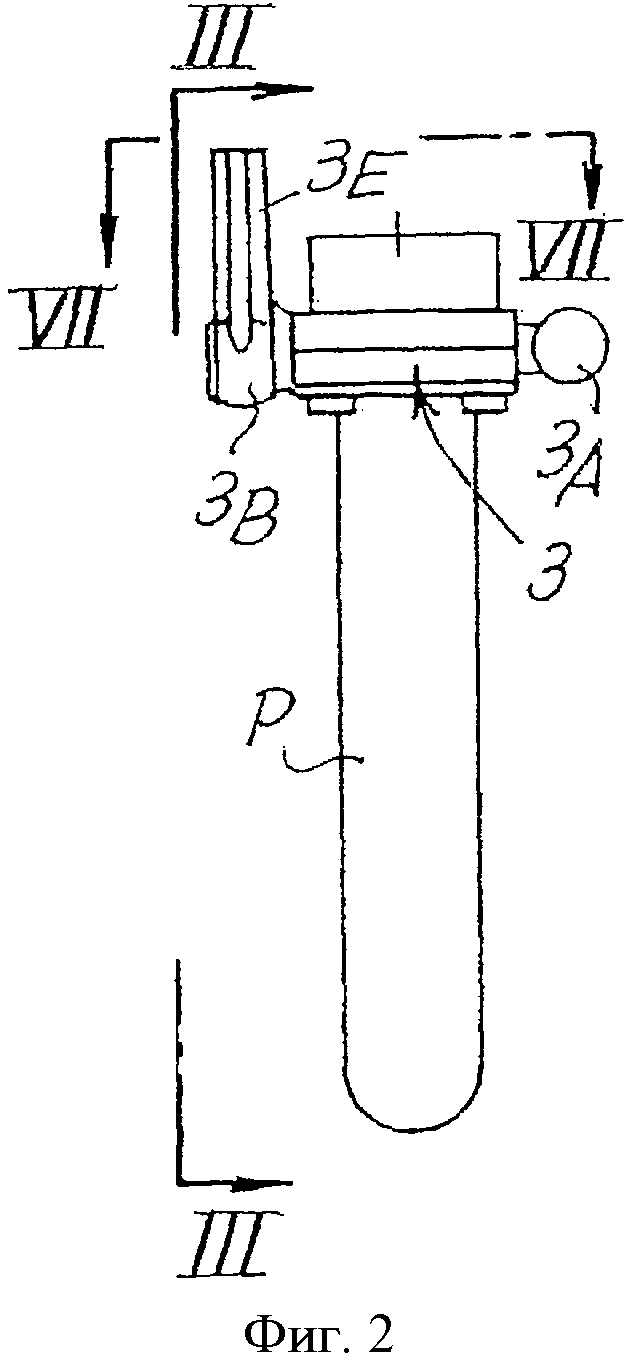
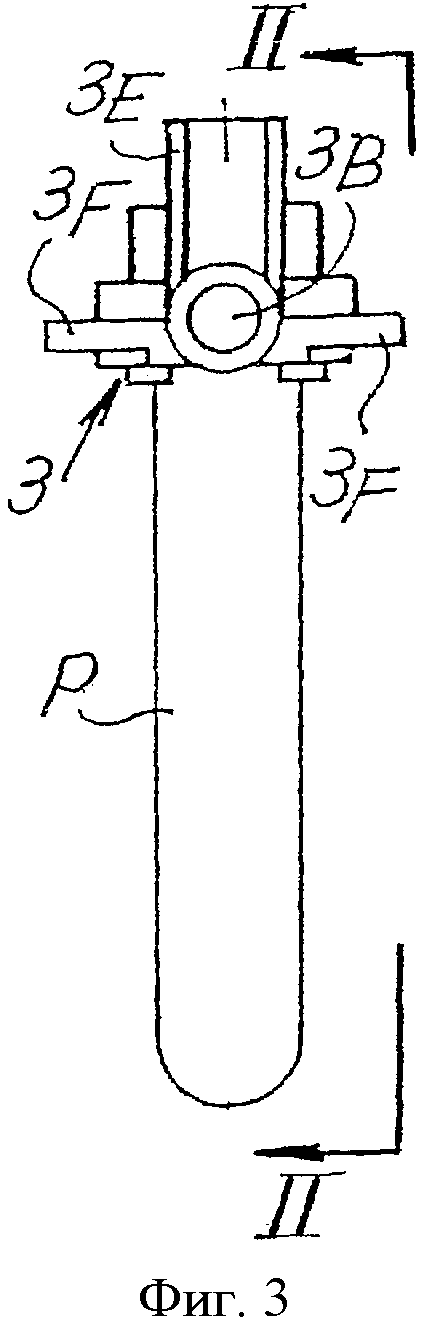
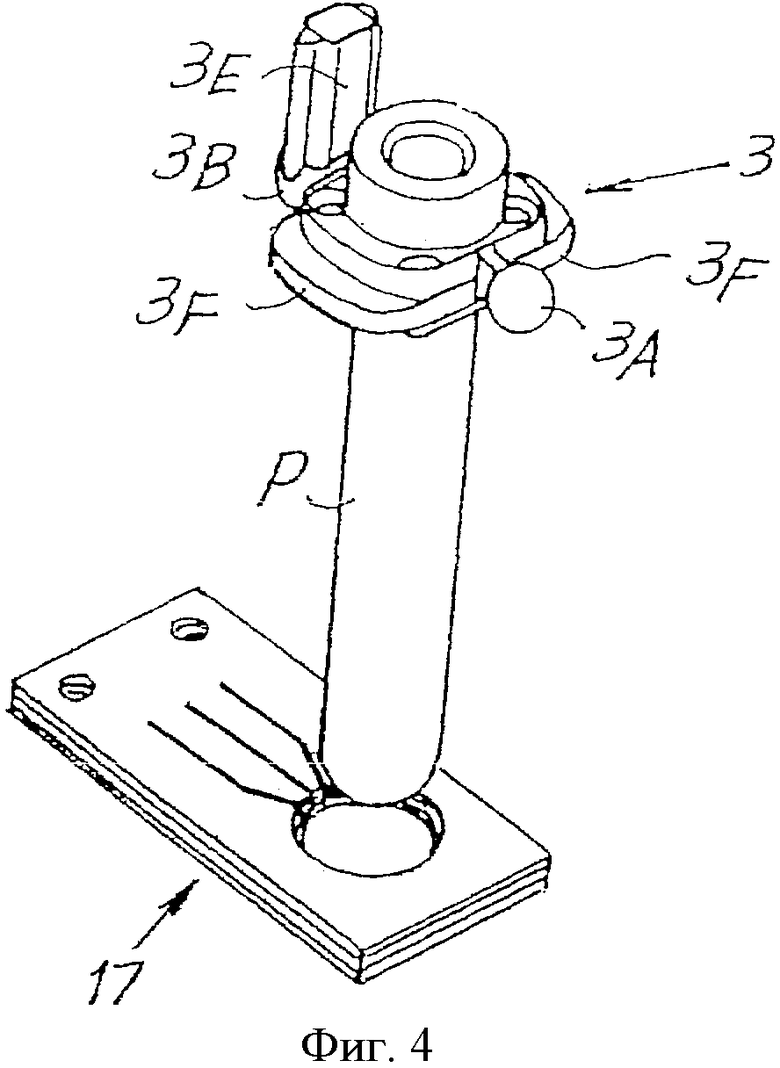
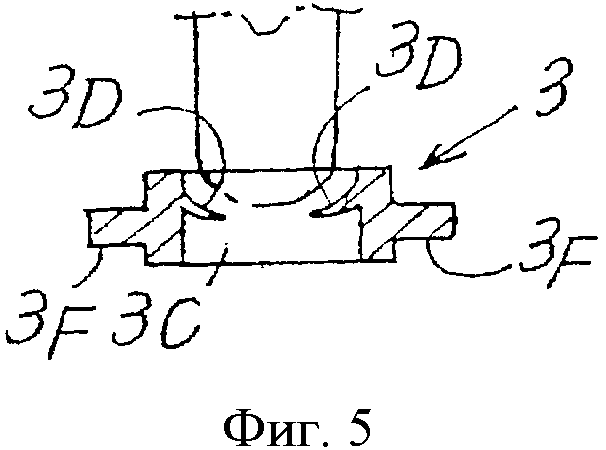
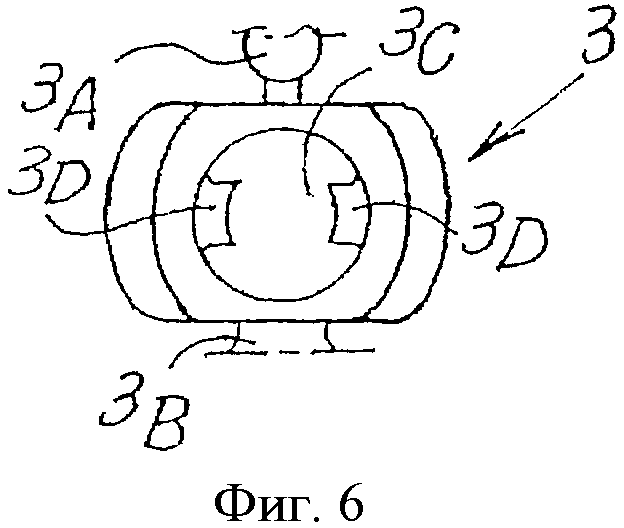
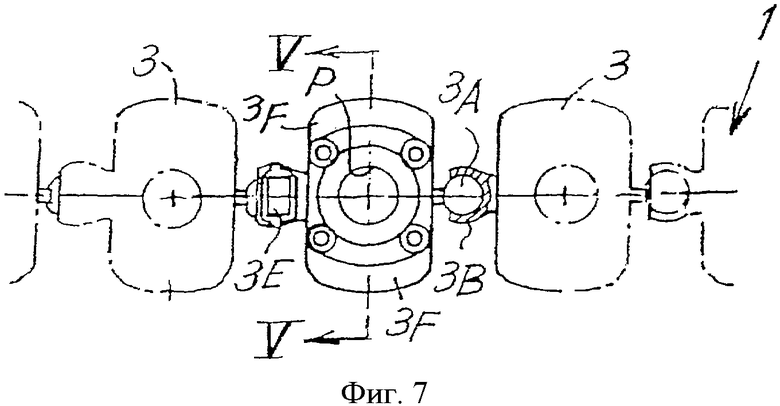
фиг.2-7 - один из держателей, образующих гибкий элемент, и стадии вставления и удерживания пробирок;
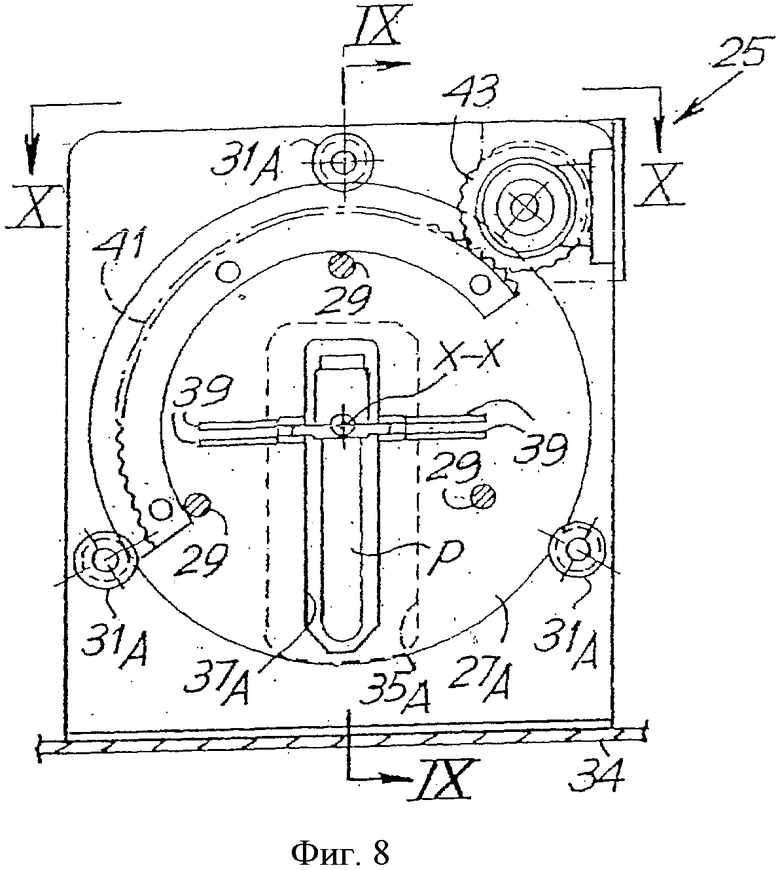
фиг.8 - разрез по линии VIII-VIII на фиг.1 устройств встряхивания;
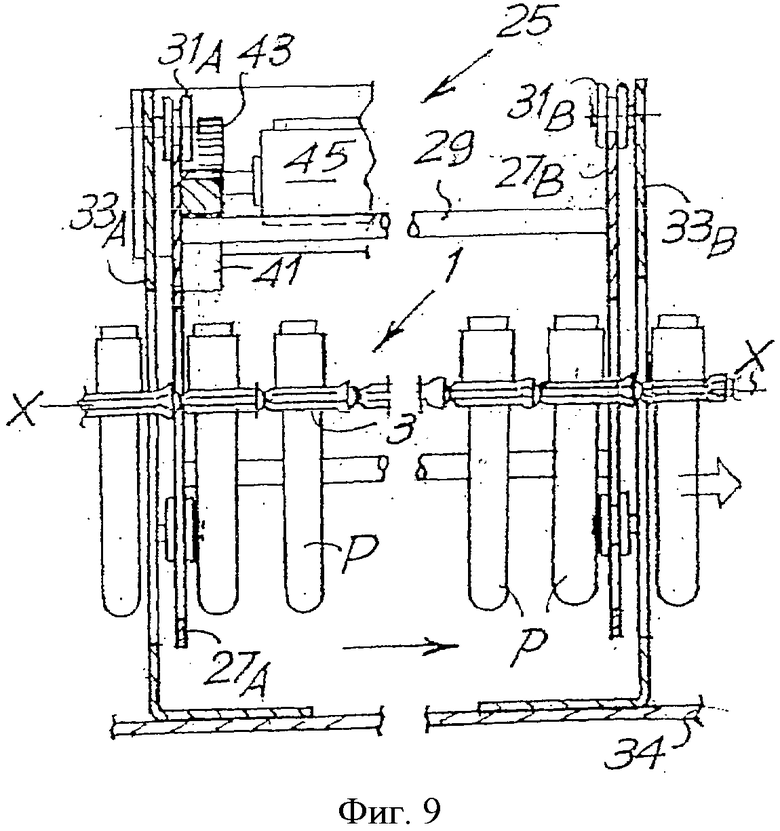
фиг.9 - разрез по линии IX-IX на фиг.8;
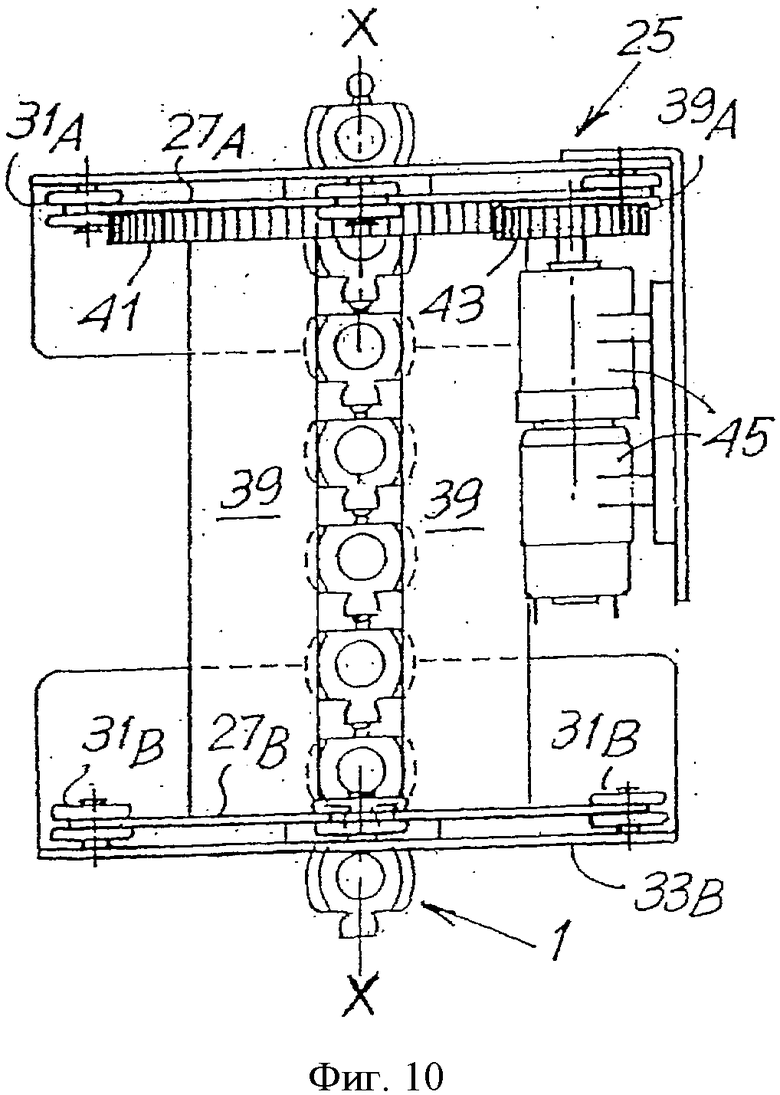
фиг.10 - вид по стрелкам Х-Х на фиг.8;
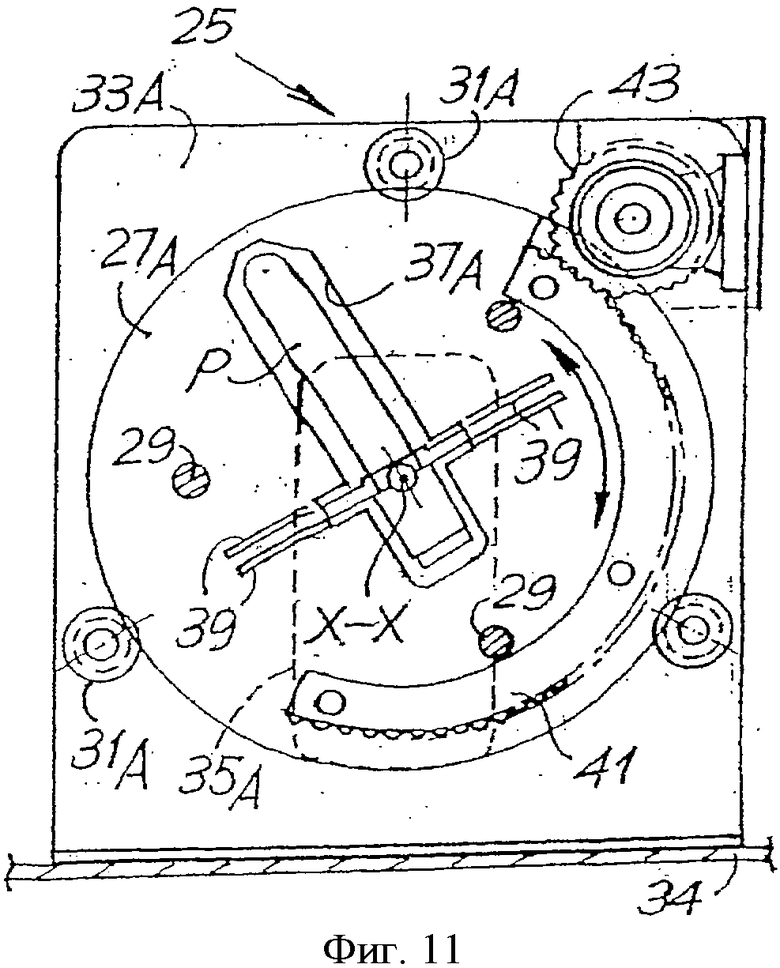
фиг.11 - разрез, аналогичный фиг.8, но в другом угловом положении пробирок, находящихся в зацеплении с устройствами встряхивания;
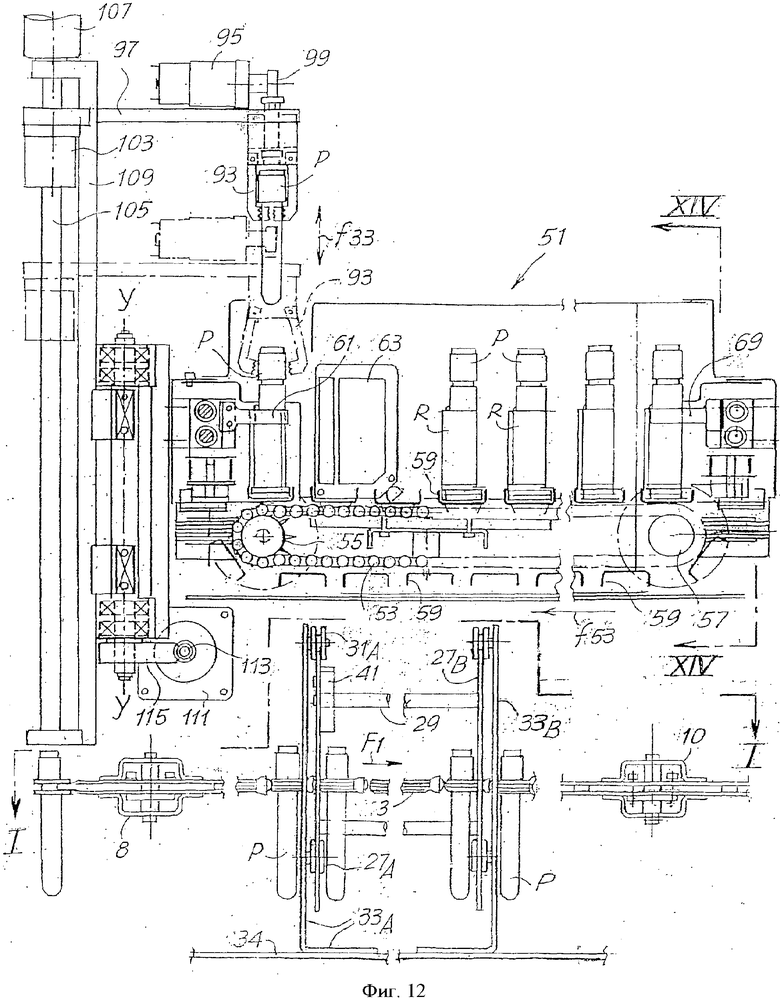
фиг.12 - разрез в вертикальной плоскости всего задающего блока, установленного над непрерывным гибким элементом;
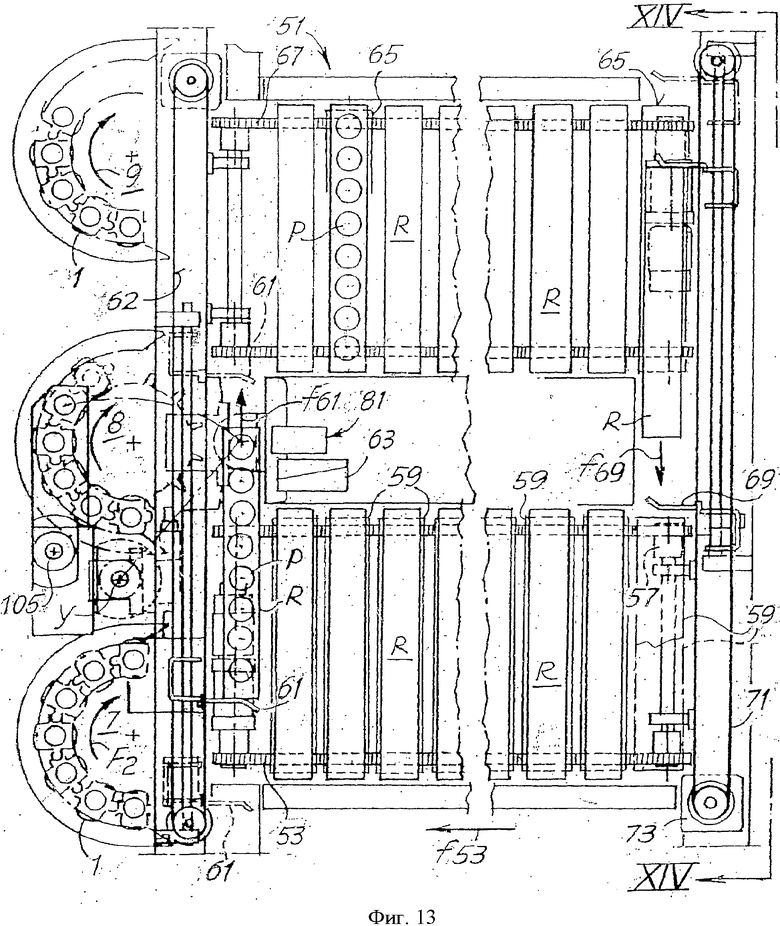
фиг.13 - весь задающий блок на виде сверху;
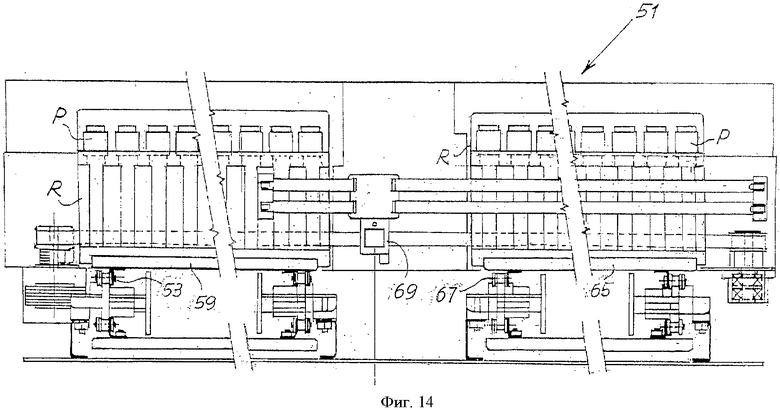
фиг.14 - вид сзади по стрелкам XIV-XIV на фиг.12 и 13;
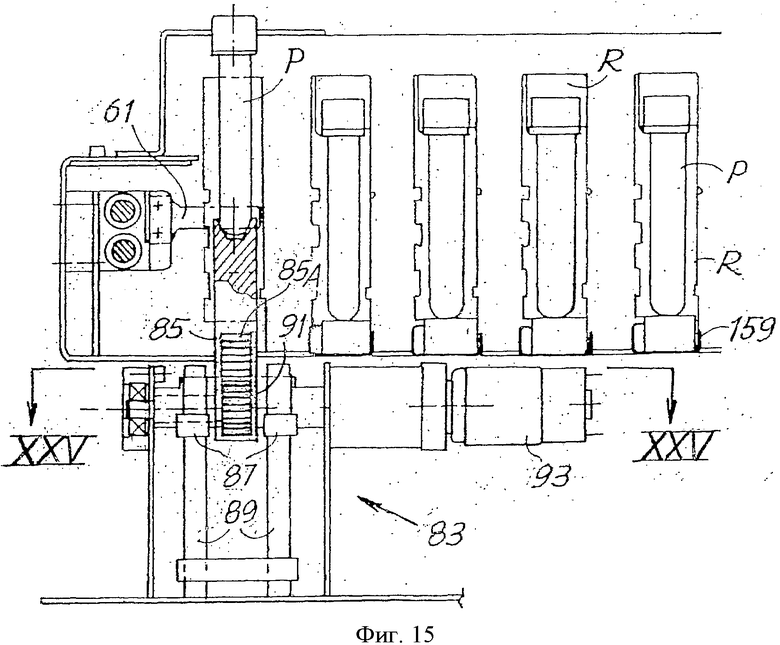
фиг.15 - экстрактор для удаления пробирок из штативов, вид сбоку;
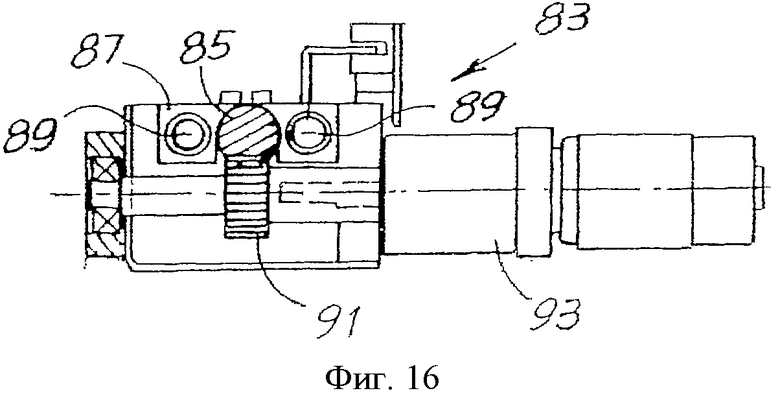
фиг.16 - вид по стрелкам XVI-XVI на фиг.15;
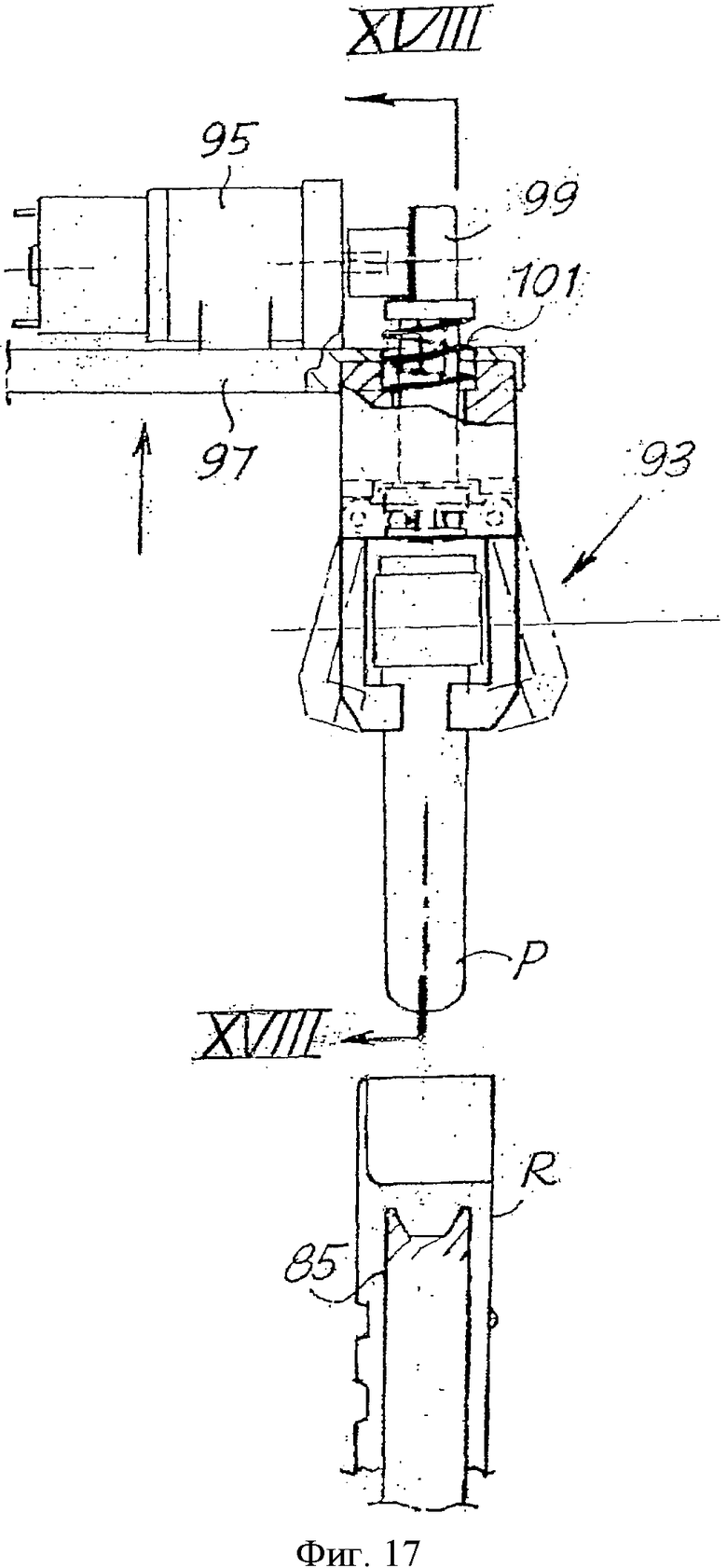
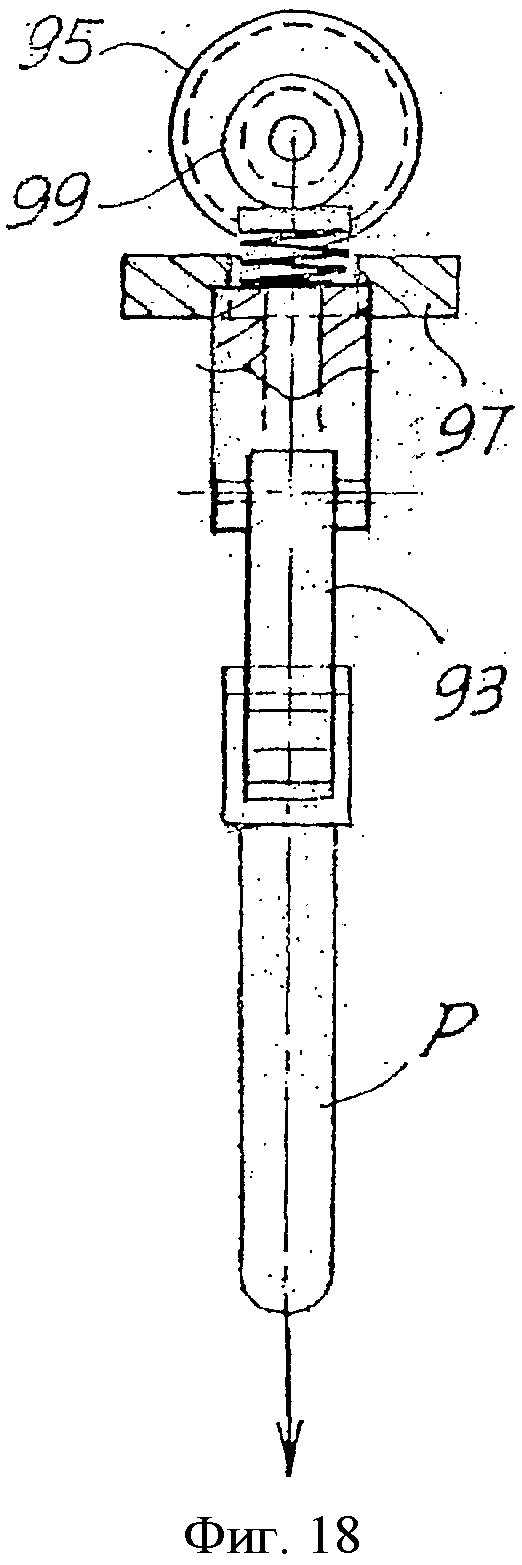
фиг.17 и 18 - устройство для переноса пробирок из задающего блока в расположенный снизу гибкий элемент, при этом на фиг.18 показан вид по стрелкам XVIII-XVIII на фиг.17;
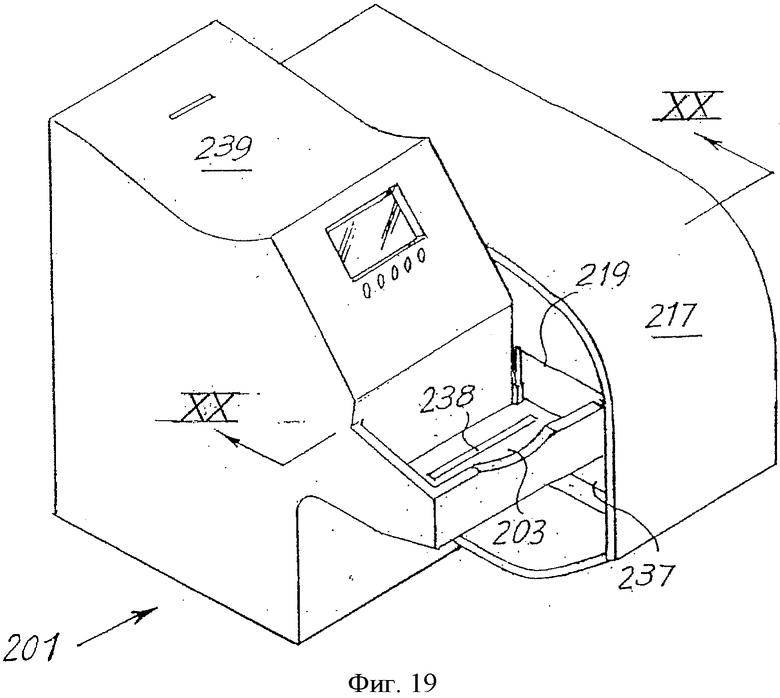
фиг.19 - устройство согласно изобретению в аксонометрической проекции;
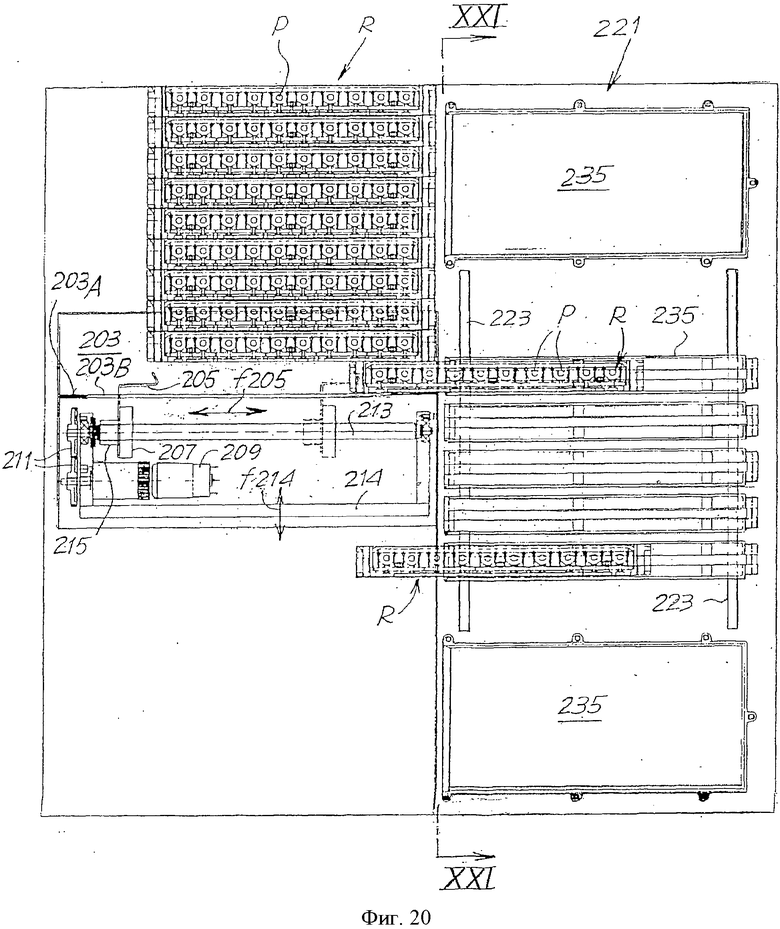
фиг.20 - разрез по линии ХХ-ХХ на фиг.19;
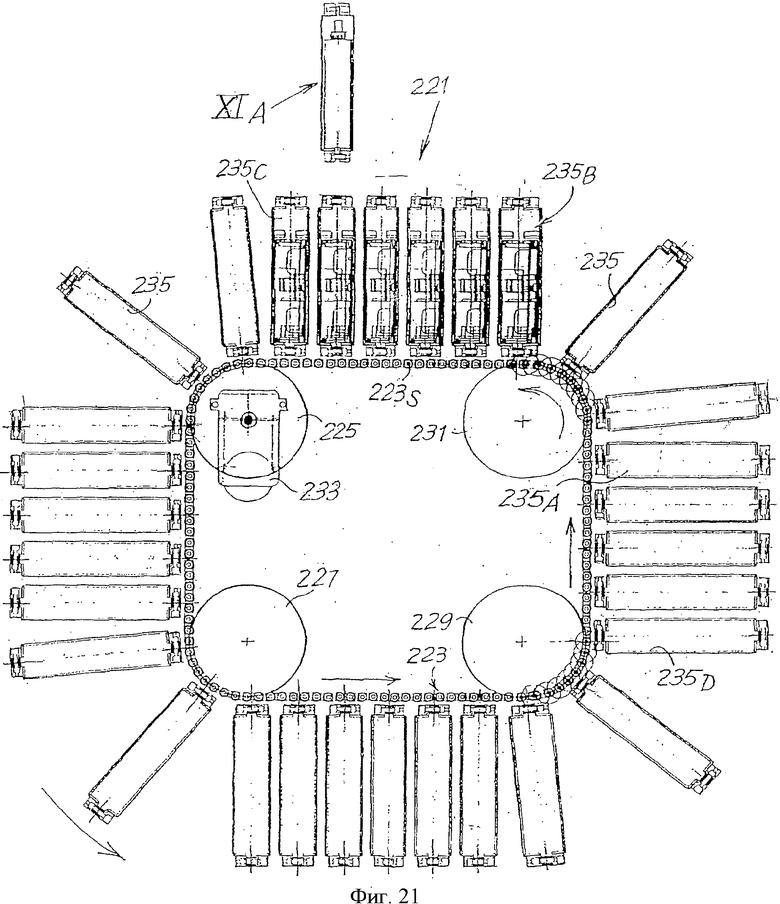
фиг.21 - вид по стрелкам XXI-XXI магазина, в вертикальной плоскости, позиция А - гнездо в магазине;
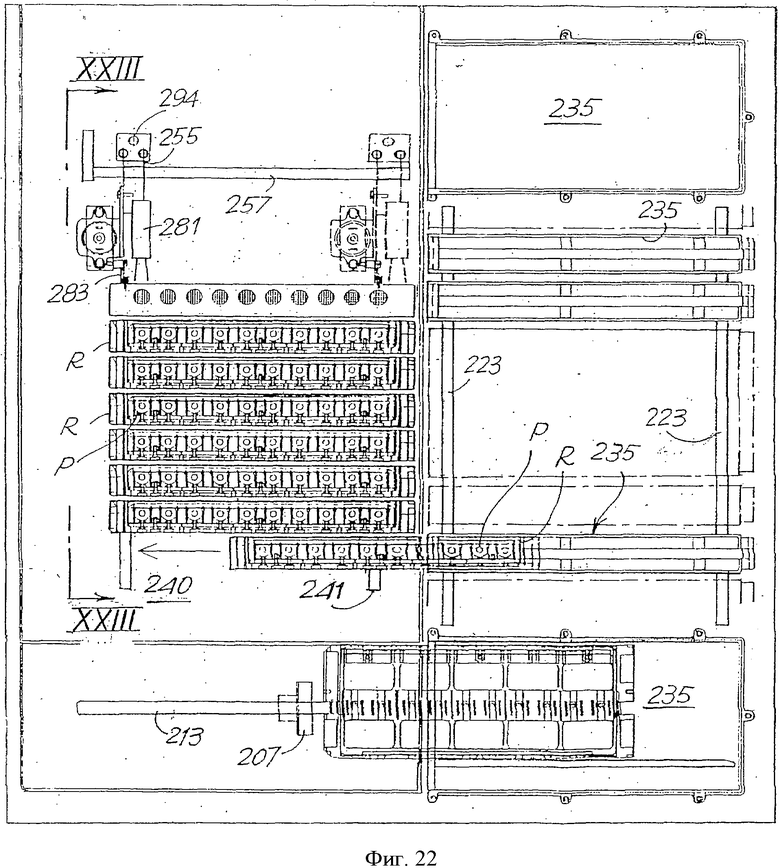
фиг.22 - магазин (с удаленным частями) зоны осаждения и зоны считывания согласно первому варианту выполнения изобретения на виде сверху;
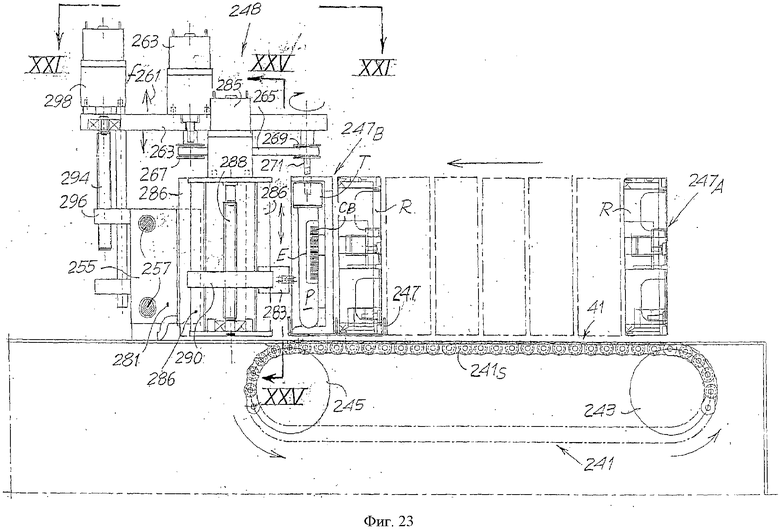
фиг.23 - вид сбоку по стрелкам XXIII-XXIII на фиг.22, позиция А - гнездо в магазине;
фиг.24 - частичный вид сверху по стрелкам XXIV-XXIV на фиг.23;
фиг.25 - частичный вид по стрелкам XXV-XXV на фиг.24;
фиг.26 - вид сверху (с удаленными частями), аналогичный фиг.22, для другого варианта выполнения и
фиг.27 - вид по стрелкам XXVII-XXVII на фиг.26.
Подробное описание предпочтительных вариантов выполнения изобретения
Ниже приводится описание первого варианта выполнения со ссылками на фиг.1-18.
Согласно первому варианту выполнения устройство содержит две секции или блока: секцию или блок встряхивания, осаждения и считывания, содержащий гибкий элемент с держателями для пробирок, и секцию или блок, установленный над ним, называемый в последующим задающим блоком. Задающий блок может отсутствовать в более экономичном, менее автоматизированном устройстве. Ниже приводится сначала описание нижнего блока с элементами встряхивания, осаждения и считывания, а затем не обязательного задающего блока с соответствующими средствами для переноса пробирок.
Как показано на фиг.1-11, нижний блок в устройстве, обозначенный в целом позицией 2, содержит гибкий элемент 1, состоящий из цепи, образованной рядом единичных элементов 3, подробное описание которых приводится ниже со ссылками на фиг.2-7. Каждый элемент 3 имеет гнездо или держатель для соответствующей пробирки Р, так что можно перемещать множество пробирок по замкнутому пути, покрываемому гибким элементом 1.
Указанный путь задан семью приводными колесами 5, 6, 7, 8, 9, 10 и 11, из которых колеса 5-9 являются ведомыми, в то время как колеса 10 и 11 являются ведущими с помощью снабженного передачей двигателя 13, электронно управляемого центральным блоком, и зубчатым ремнем 15, лежащим ниже плоскости, в которой лежит гибкий элемент 1. Снабженный передачей двигатель 13 вызывает шаговую подачу вперед гибкого элемента 1, при этом каждый шаг соответствует одному элементу 3. Последовательные шаги выполняются с регулируемым интервалом времени по причинам, которые поясняются ниже.
На фиг.1 шесть положений вдоль пути гибкого элемента 1 обозначены буквами А, В, С, D, Е, F для функций и целей, описание которых приводится ниже.
В положении А отдельные пробирки Р вставляются в держатели в элементах 3, когда он проходит это положение.
В положении В находится первый детектор, обозначенный в целом позицией 17, который может быть емкостным датчиком, видеокамерой, оптической системой с передатчиком и приемником, или любым другим детектором, подходящим для определения уровня пробы, содержащейся в каждой пробирке Р, проходящей положение В.
В положениях С и D находятся соответственно второй и третий детекторы, обозначенные позициями 19 и 21, которые могут быть того же типа, что и детектор 17, или же могут быть другого типа. Они служат для определения уровня осадка в пробах после выдерживания пробирок в условиях, подходящих для осаждения, в течение заданного времени. Два детектора 19 и 21 занимают различные положения вдоль пути гибкого элемента 1, так что они могут выполнять аналогичные считывания с двумя различными интервалами времени. Детектор 21 может также отсутствовать.
В положениях Е и F находятся два экстрактора (не изображены), которые извлекают пробирки из держателей 3 и разгружают их в два разных контейнера. Электронные программы управляют устройством так, что все пробирки, которые были правильно измерены детекторами 17 и 19 и, не обязательно, детектором 21, разгружаются одним из двух экстракторов в первый контейнер. И наоборот, пробирки, которые вызвали сбои (например, потому что они были пусты, нечитаемы или по какой-либо причине не позволили завершить анализ), разгружаются вторым экстрактором во второй контейнер. Это позволяет оператору легко идентифицировать пробы и тем самым пациентов, для которых необходимо повторить анализ.
Форма элементов 3, образующих гибкий элемент 1, подробно показана на фиг.2-7. В частности, каждый элемент 3 является звеном в цепи и снабжен сферическими выпуклыми или вогнутыми шарнирами для скрепления с предыдущим и последующим элементами. Выпуклый сферический элемент в шарнире обозначен позицией 3А, а вогнутый сферический элемент обозначен позицией 3В.
Корпус элемента 3 имеет открытое снизу гнездо 3С (смотри фиг.5, 6), в которое вставляется пробирка Р. Предусмотрены две гибкие удерживающие лапки в открытом снизу гнезде 3С, обозначенные позицией 3D. К выпуклой части 3В сферического шарнира неподвижно прикреплено гнездо 3Е, в которое вставлен ретранслятор, так что каждая пробирка связана с ретранслятором по причинам, указанным ниже. Кроме того, корпус каждого элемента 3 включает два башмака 3F скольжения для вхождения в зацепление и скольжения по направляющим, расположенным вдоль пути гибкого элемента. Указанные направляющие могут проходить по всему пути для исключения нежелательных колебаний отдельных держателей 3, в частности, в зоне, предназначенной для осаждения проб. И наоборот, часть направляющих может быть подвижной для вызывания колебаний держателей, а следовательно, встряхивания проб крови или другой биологической жидкости, содержащейся в пробирках. Каждый держатель 3 может быть изготовлен простым формованием синтетической смолы.
На фиг.4 схематично показан также детектор емкостного типа, обозначенный позицией 17, который можно использовать в различных местах вдоль пути гибкого элемента. Указанный детектор выполнен с возможностью прохождения вдоль длины пробирки от дна до зоны под держателем 3 с целью считывания уровня пробы и/или осадка. После завершения считывания детектор снова перемещается вниз из пути прохождения пробирок для обеспечения их продвижения с помощью гибкого элемента 1. Как указывалось выше, это всего лишь один тип детектора, который можно использовать в устройствах такого типа, но не единственный. В целом, устройство может быть снабжено одним или несколькими детекторами даже различного типа при условии, что они способны обеспечивать информацию, для считывания которой предназначено устройство.
На прямом участке гибкого элемента 1 между ведомым колесом 8 и ведущим колесом 10 расположены устройства встряхивания, обозначенные в целом позицией 25 и показанные подробно на фиг.8-11.
Устройства встряхивания содержат ротор, состоящий из пары дисков 27А, 27В, соединенных друг с другом соединительными брусками 29 (не изображены для ясности на фиг.10). Диски 27А и 27В опираются с возможностью вращения вокруг оси, совпадающей с осью Х-Х сферических шарниров, соединяющих элементы 3 в части гибкого элемента 1, которая проходит через диски 27А, 27В.
Каждый дисковый держатель состоит из набора из трех рифленых колес 31А, 31В, опирающихся вхолостую на соответствующие опорные пластины 33А, 33В, прикрепленные к основанию 34 устройства и проходящие перпендикулярно плоскости, в которой лежит гибкий элемент 1. Каждая пластина 33А, 33В имеет прорезь 35А, 35В для прохождения пробирок и гибкого элемента 1, и аналогичный проход 37А, 37В предусмотрен в двух дисках 27А, 27В. С двумя дисками 27А, 27В неподвижно соединены направляющие 39, которые проходят параллельно оси Х-Х колебаний ротора, образованного указанными дисками, и по обе стороны указанной оси. Каждая направляющая состоит из пары параллельных отдельных лопастей, жестко соединенных с двумя дисками 27А, 27В. Башмаки 3F скольжения единичных держателей 3, образующих гибкий элемент 1, вставлены и скользят между двумя парами лопастей (смотри фиг.7). Сектор 41 зубчатого венца, входящий в зацепление с шестерней 43, приводимой в движение электродвигателем 45, неподвижно соединен с диском 27А.
Описанные выше устройства 25 встряхивания работают следующим образом: непрерывный гибкий элемент 1 продвигается с шагом вдоль своего пути. В каждый момент времени определенное число держателей 3 (шесть в показанном на фиг.9 и 10 примере) находятся в зацеплении с направляющими 39 ротора, образованного дисками 27А, 27В. Колебательное движение, сообщаемое электродвигателем 45 ротору, с помощью шестерни 43 и сектора 41 зубчатого венца вызывает колебания держателя 3, находящегося в зацеплении с направляющими 39 и, следовательно, пробирок Р, вставленных в держатели. На фиг.8 и 11 показаны два крайних положения, занимаемых пробирками Р во время колебаний. Сферические шарниры между элементами 3 позволяют каждому держателю поворачиваться относительно предыдущего и последующего держателя для выхода из плоскости, в которой лежит гибкий элемент 1. Таким образом, между одним шагом вперед гибкого элемента 1 и следующим шагом пробирки, вставленные в шесть держателей 3, находящихся в зацеплении с ротором посредством направляющих 39, могут свободно колебаться вокруг оси Х-Х, без помех колебаниям со стороны держателей 3, расположенных по потоку непосредственно перед и позади дисков 27А, 27В (относительно направления F1 подачи вперед гибкого элемента 1).
Колебательное движение, вызываемое электродвигателем 45, отделено от движения шаговой подачи вперед гибкого элемента 1 и может иметь любую частоту, подходящую для необходимого встряхивания пробирок Р. Таким образом, каждая пробирка Р, которая продвигается вперед с опорой на гибкий элемент 1, встряхивается в течение периода времени, совпадающего со временем нахождения между двумя дисками 27А, 27В, т.е. времени, кратному времени каждого шага подачи вперед, при этом коэффициент кратности соответствует числу держателей 3, одновременно проходящих между дисками 27А, 27В, т.е. шести в показанном примере. Колебания предпочтительно останавливаются на короткий период во время движения подачи вперед гибкого элемента, состоящего из держателей 3, однако эта остановка колебаний является очень короткой, поскольку остановка между одним шагом и следующим шагом длится существенно дольше, чем время для завершения каждого шага подачи вперед.
Детектор 17, расположенный по потоку непосредственно за зоной встряхивания, заданной устройствами 25 встряхивания, считывает уровень пробы, содержащейся в каждой пробирке, перед фазой осаждения.
Путь, проходимый гибким элементом между выходом из устройств 25 встряхивания и вторым детектором 19 в положении С, образует зону осаждения. На этом пути каждая пробирка остается в вертикальном положении во время прохождения от положения В в положение С. Время осаждения задано соответствующими стандартными рекомендациями для выполнения анализа. Расстояние между положениями В и С и время для завершения каждого шага плюс время остановки между одним шагом и следующим шагом заданы так, чтобы каждая пробирка имела по существу время для осаждения во время прохождения из положения В в положение С, естественно, с учетом времени, необходимого для завершения всех необходимых процессов, выполняемых с каждой пробиркой, в различных местах вдоль пути гибкого элемента 1, например, процесса вставления пробирки в положении А; считывания в положениях В и С, а также, возможно, в положении D; извлечения и разгрузки пробирок в положениях Е или F.
Считывание высоты осадка в пробе, содержащейся в каждой пробирке, выполняется в положении С детектором 19. Данные, регистрируемые двумя детекторами, позволяют вычислять скорость осаждения эритроцитов (ESR).
Третий детектор 21 (если он предусмотрен) в положении D расположен на расстоянии от детектора 19, достаточном для дополнительного осаждения каждой пробирки Р в течение заданного времени прохождения от положения С в положение D. Таким образом, этот третий детектор выполняет второе считывание уровня осадка после второго интервала времени.
Затем пробирки подаются вперед из положения D в положение Е или F для разгрузки с помощью эжектора, который выполнен указанным ниже образом.
Вдоль пути подачи вперед гибкого элемента 1 могут быть расположены неподвижные направляющие (за исключением зоны, занимаемой устройствами 25 встряхивания) для удерживания пробирок с постоянной ориентацией, предпочтительно в вертикальном положении. Эти направляющие могут быть выполнены так же, как направляющие 39 ротора, образующего часть устройств 25 встряхивания.
Электродвигатели 13 и 45, детекторы 17, 19 и 21, а также эжекторы (не изображены) в положениях Е и F связаны с программируемым блоком управления, обозначенным позицией 47. Указанный блок управляет и координирует движения различных частей устройства, он получает данные считывания от детекторов, а также получает, например, с помощью устройства считывания штрихкода, информацию, нанесенную на каждую пробирку. Устройство считывания штрихкода (или другой подходящий интерфейс) может быть предусмотрено на ручном устройстве, используемом оператором, который выполняет в более простом варианте выполнения загрузку каждой пробирки в различные держатели, которые проходят положение А, так что программируемая система может получать данные о пациенте, с которым следует связывать результаты подлежащего выполнению прибором анализа.
Как будет указано ниже, эти процессы можно автоматизировать с использованием задающего блока, установленного над гибким элементом 1.
Вдоль пути гибкого элемента 1 имеются один или несколько сканеров ретрансляторов известного типа (не изображены). Например, один из них может быть расположен в положении А, и один или несколько могут быть расположены в других подходящих положениях, даже совпадающих с положениями В, С, D, Е, F или между ними.
Таким образом, при каждом прохождении держателя 3 положения А центральный блок 47 не только получает информацию, нанесенную на пробирку, вставленную в указанный держатель, но также связывает специальный ретранслятор с заданной пробиркой. Это позволяет системе все время знать положение каждой пробирки, даже в случае временного отсутствия электропитания, без опоры исключительно на счетчик шагов подачи вперед, вызываемой электродвигателем 13, для получения указанной информации.
Задающий блок, который может быть предусмотрен в указанном выше устройстве, показан на фиг.12 и далее и обозначен в целом позицией 51. Он содержит первый непрерывный конвейер 53, приводимый в движение вокруг колес 55, 57 и снабженный последовательностью гнезд 59, которые могут быть также взаимозаменяемыми, для размещения штативов R, содержащих пробирки Р. Штативы R могут быть различной формы и типов, и это может вызывать необходимость замены гнезд 59 в зависимости от штативов, используемых в данной лаборатории.
Движение конвейера 53 (по стрелке f53) переносит каждое гнездо 59 с его соответствующим штативом R из зоны загрузки в зону сбора, показанную на фиг.12 и 13 на левом конце пути, проходимом конвейером 53. Здесь первое переводное устройство 61 толкает каждый штатив в направлении стрелки f61 для его перевода перед устройством 63 считывания штрихкода или другим устройством для считывания информации, прикрепленной (с помощью напечатанной этикетки или другим образом) к каждой пробирке, содержащейся в штативе. Переводное устройство 61 приводится в действие электродвигателем, управляемым блоком 47, с помощью ремня 62 или другого механического приводного элемента.
При нахождении пробирки перед устройством 63 считывания штрихкода устройство 63 определяет, подлежит ли каждая пробирка измерению скорости осаждения эритроцитов. В действительности, не все пробы, содержащиеся в различных пробирках в штативах R, должны обязательно подвергаться указанному тесту. Могут иметься также некоторые пробы, которые нуждаются в другом анализе, например полном анализе крови.
Подача вперед штатива в направлении стрелки f61 происходит шагами для обеспечения считывания отдельных этикеток, с одной стороны, и, с другой стороны, для сбора и переноса отдельных пробирок со штатива R на расположенный внизу гибкий элемент 1 для измерения скорости осаждения эритроцитов. Пробирки, которые не требуют измерения скорости осаждения эритроцитов, остаются в штативе R и толкаются, вместе со штативом, с помощью того же переводного устройства 61 в соответствующее гнездо 65 на втором конвейере 67, по существу зеркально симметричном конвейеру 53.
Этот второй конвейер 67 служит в качестве сопрягающего устройства с оператором, который вставляет подлежащие обработке штативы в гнезда 65 в конвейере и удаляет уже обработанные штативы из гнезд. Перевод штативов, вставленных оператором в гнезда 65, из указанных гнезд в гнезда 59 в первом конвейере 53 выполняется с помощью второго переводного устройства 69, по существу зеркально симметричного переводному устройству 61 и приводимого в движение с помощью ремня 71 и электродвигателя 73 (смотри фиг.13). Средство для указания оператору, какой штатив обработан, а какой не обработан, может быть связано с конвейером 67, при этом оно становится доступным при открывании заслонки (не изображена). Например, различные положения, которые заняты гнездами 65 конвейера 67, могут быть связаны со светоизлучающими диодами двух разных цветов (например, красного и зеленого). Загорание одного или другого светоизлучающего диода управляется центральным блоком 47 в зависимости от выполненного процесса. Например, все штативы, еще подлежащие обработке, идентифицируются с помощью включаемого красного светоизлучающего диода, в то время как все уже обработанные штативы идентифицируются с помощью включаемого зеленого светоизлучающего диода. Это позволяет оператору быстро распознавать штативы, которые можно удалять и заменять новыми штативами, подлежащими обработке, без необходимости проверки, удалены ли пробирки (или некоторые из них) из штативов. Это также предотвращает случайное оставление штативов, содержащих пробирки, не предназначенные для измерения скорости осаждения эритроцитов, внутри устройства.
Кроме того, может быть также предусмотрена возможность автоматической разгрузки штативов за счет продления хода переводного устройства 61, которое может также выбрасывать обработанные штативы через прорезь, предусмотренную в крышке устройства.
Перевод отдельных пробирок Р, требующих проведения анализа с помощью средств, расположенных под задающим блоком 51, осуществляется с использованием элементов, показанных детально на фиг.12 и 15-18. Эти элементы не показаны на фиг.13 и 14 для ясности.
Ниже уровня основания отдельных штативов по потоку за устройством 63 считывания штрихкода, в положении, обозначенном позицией 81 на фиг.13, имеется экстрактор, обозначенный в целом позицией 83 и показанный подробно на фиг.15 и 16. Он имеет движок 85, неподвижно прикрепленный к башмаку 87 скольжения, который скользит по вертикальным направляющим 89. Верхний конец движка 85 выполнен с полостью для размещения дна пробирок Р. Движок имеет передачу 85А, входящую в зацепление с шестерней 91, которая вращается электродвигателем 93, соединенным с блоком 47 управления. Когда пробирка Р, находящаяся на одной линии с движком 85, подлежит переводу в нижнюю часть устройства, то движок поднимается в положение, показанное на фиг.15, для частичного выталкивания пробирки Р из штатива R, и делает ее вершину доступной для захватного и переводного зажима, обозначенного позицией 93 и показанного на фиг.17 и 18, а также на фиг.12. Открывание и закрывание зажима 93 управляется электродвигателем 95, несомым поперечиной 97. Вал электродвигателя 95 снабжен кулачком 99, который вызывает открывание зажима, при этом закрывание зажима вызывается пружиной 101 сжатия. Поперечину 97 несет подвижный элемент 103, прочно соединенный с резьбовой втулкой, находящейся в зацеплении с резьбовой штангой 105, вращение которой управляет электродвигатель 107. С помощью резьбовой штанги 105 электродвигатель 107 управляет перемещением вверх и вниз зажима 93 в направлении двойной стрелки f93.
Электродвигатель 107 и резьбовая штанга опираются на опору 109, способную выполнять колебательное движение вокруг вертикальной оси У-У под действием электродвигателя 111 с помощью винта 13 и сектора зубчатого колеса 115, прочно скрепленного с опорой 109.
С помощью этой системы каждая пробирка Р, частично удаленная с помощью экстрактора 83 из штатива R, захватывается зажимом 93, который может ее захватывать под пробкой, исключая опасность случайного открывания пробирок. Затем при движении вверх, колебательном движении вокруг оси У-У и последующем движении вниз пробирка Р вставляется зажимом 93 в гнездо 3С держателя 3, находящегося в данный момент в положении С. Для обеспечения правильного вставления пробирки Р в гнездо ЗС зажим открывается, поднимается, закрывается и затем снова опускается для нажима на пробку пробирки, пока она не будет полностью вставлена в держатель, что определяется измерением крутящего момента, прилагаемого электродвигателем 107.
Пробирка, вставленная в держатель 3С, удерживается в нем с помощью лапок 3D в течение времени, необходимого для завершения указанных выше процессов встряхивания, осаждения, считывания и выбрасывания. Эжекторы (не изображены), которые установлены в положениях Е и F вдоль пути гибкого элемента 1, могут быть выполнены аналогично экстрактору 83, показанному на фиг.15 и 16, за исключением увеличенной длины движка 85, который должен полностью выбрасывать пробирку из гнезда 3С.
Другой вариант выполнения изобретения показан на фиг.19-27, описание которого приводится ниже.
На фиг.19 показан внешний вид в аксонометрической проекции устройства согласно одному варианту выполнения изобретения, обозначенного в целом позицией 201. Устройство содержит поддон для загрузки штативов с пробирками, подлежащими анализу, обозначенный позицией 203. На дне поддона 203, обозначенном позицией 203А (смотри фиг.20), имеется прорезь 203, вдоль которой скользит плунжер 205, прочно соединенный с движком 207 и перемещающийся в направлении двойной стрелки f205 для загрузки отдельных штативов с пробирками в устройство. Движением плунжера 205 управляет электродвигатель 209 с помощью пары зубчатых колес 211, которые вращают резьбовую штангу 213, находящуюся в зацеплении с винтом 215 с мелкой резьбой, прочно соединенным с движком 207. Когда штабель штативов R, загруженных пробирками Р, помещается на поддон 203, то движок 205 находится в положении в левой части фиг.20. Перемещение слева направо движка 207 и плунжера 205, вызванное электродвигателем 209, толкает самый нижний штатив штабеля вправо в зону 217 устройства с прохождением через прорезь 219 (смотри фиг.19).
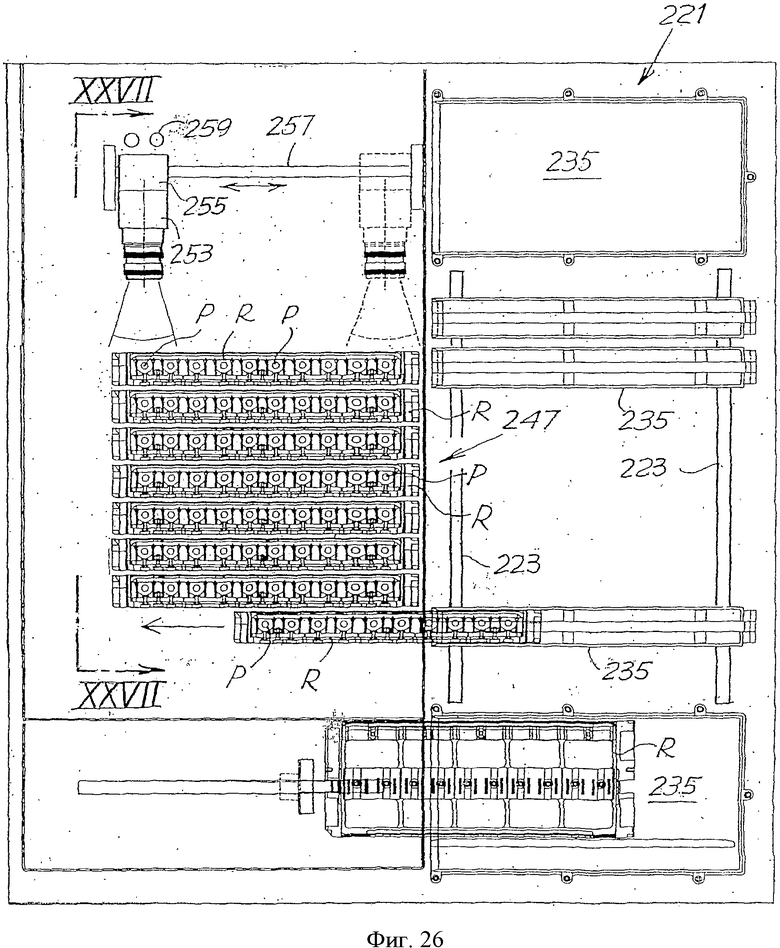
Внутри зоны 217 устройства имеется магазин, обозначенный в целом позицией 221 и более видимый на фиг.21.
Магазин содержит гибкий элемент, в данном примере цепь 223 или пару цепей 223, образующих непрерывный конвейер, приводимый в движение вокруг четырех зубчатых колес 225, 227, 229 и 231, при этом зубчатое колесо 225 приводится во вращение электродвигателем 233. По всей длине конвейера 233 имеются гнезда 235 в форме двойной оболочки (смотри фиг.21А). Размер каждого гнезда 235 такой, что оно может содержать штатив R с пробирками. Каждое гнездо 235 способно охватывать или окружать вставленный в него штатив, так что штатив R может проходить расстояние, проходимое конвейером 223, даже вдоль его нижнего участка без выпадания. Как показано более подробно на фиг.21, путь гнезд 235, проходимый конвейером 223, проходит через первое положение загрузки, обозначенное позицией 235А на фиг.21. Гнездо 235, занимающее это положение, находится на одной линии с прорезью 219 и принимает штатив, толкаемый плунжером 205.
По потоку за положением 235А относительно направления, в котором продвигается конвейер 223 вдоль своего пути, находится второе положение, обозначенное позицией 235В, из которого штатив, содержащийся в гнезде, находящемся в этом положении, выталкивается с помощью плунжера (не изображен) типа, аналогичного плунжеру 205, в направлении зоны осаждения, описание которой будет приведено ниже. По потоку за положением 235В вдоль пути конвейера 223 имеется третье положение, обозначенное позицией 235С, в котором штативы, которые были обработаны, снова вставляются в гнездо, занимающее это положение. Это движение повторного вставления может обеспечиваться плунжером, таким как указанный выше плунжер 205.
Наконец, по потоку перед положением 235А имеется положение 235D, из которого обработанные штативы выбрасываются из устройства. Положение 235D находится на одной линии с прорезью 237 (смотри фиг.19), через которую обработанные штативы покидают устройство 201. Это движение выбрасывания достигается с помощью плунжера (не изображен), аналогичного плунжеру 205.
В положении 239 устройства (смотри фиг.19) расположена зона осаждения, в которой штативы переносятся из магазина 221 и из которой обработанные штативы (которые уже прошли считывание) выбрасываются и снова вставляются в магазин 221.
Первый вариант выполнения зон осаждения и считывания проб показан детально на фиг.22 и 23.
В зоне осаждения, обозначенной в целом позицией 240, имеется второй гибкий конвейер 241, снова содержащий цепь или несколько цепей, приводимых в движение между двумя зубчатыми колесами 243 и 245, одно из которых приводится во вращение электродвигателем.
Гнезда 247 для расположения отдельных штативов R, приходящих из магазина 221, прикреплены к цепи 241. В отличие от гнезд 235 в указанном магазине, гнезда 247 не окружают штативы, они просто поддерживают их. Как следует из последующего описания, штативы лишь удерживаются на конвейере 241 вдоль верхнего горизонтального участка конвейера, обозначенного позицией 241S на фиг.23, который лежит по существу на той же высоте, что и верхний участок 223S цепи 223 магазина 221. Два участка 241S и 223S по существу параллельны друг другу. Такое расположение обеспечивает прямой перенос с одного из конвейеров 223 и 241 на другой с помощью плунжеров, аналогичных плунжеру 205, показанному для вставления штативов в устройство. Эти дополнительные плунжеры для перевода штативов между конвейерами 223 и 241, не показаны на чертежах для ясности.
Каждый штатив, вставленный в соответствующее гнездо 247 конвейера 241, переводится из положения 247А вставления (смотри фиг.23) в положение 247В считывания в зоне считывания, обозначенной в целом позицией 248. Время, проводимое пробирками в зоне осаждения, представленное практически верхним участком 241S конвейера 241, равно времени осаждения, заданного протоколами для измерения скорости осаждения эритроцитов. Число гнезд 247, размещаемых вдоль участка 241S конвейера 241, и время переноса отдельных штативов из положения 247А в положение 247 В зависят также от числа пробирок, которое может содержать каждый штатив, поскольку указанное число определяет время, занимаемое для завершения считывания всех пробирок в данном штативе.
В зоне 248 считывания могут быть предусмотрены различные устройства для считывания проб в зависимости от конструкции устройства. На прилагаемых чертежах показаны две разные возможные конфигурации этих устройств считывания.
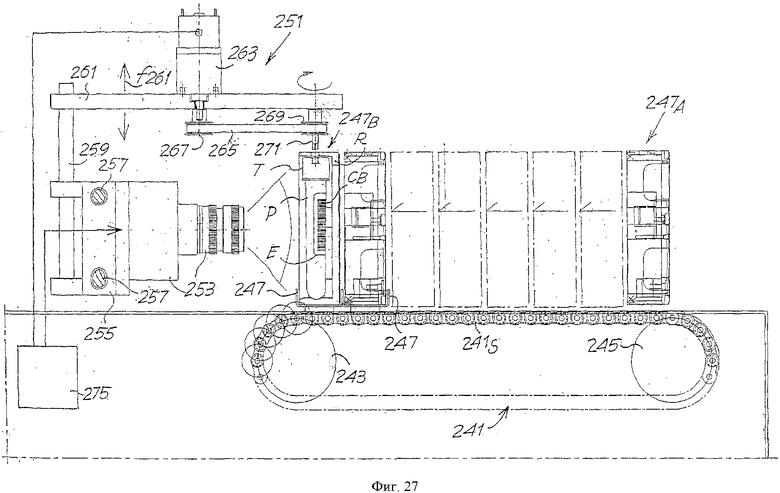
Как показано на фиг.26 и 27, в первом варианте выполнения имеется видеокамера 253 в зоне 251 считывания, установленная на каретке 255, которая выполнена с возможностью перемещения в направлении двойной стрелки f255 по неподвижным горизонтальным направляющим 257. Указанные направляющие 257 проходят параллельно штативам R, которые находятся в зоне осаждения и считывания. Шаговое перемещение каретки 255 вдоль направляющих 257 позволяет располагать видеокамеру 253 перед каждой из пробирок Р, содержащихся в штативе R в положении 247В.
Вертикальные направляющие бруски 259 прочно прикреплены к каретке 255, по которым скользит подвижное седло 261 в направлении двойной стрелки f261. На седле 261 установлен электродвигатель 263, который с помощью ремня 265 и шкивов 267, 269 вращает фасонный штифт 271, который может входить в полость в пробках Т в отдельных пробирках Р, содержащихся в штативе R. Поворот штифта 271, который может вводить в зацепление и выводить из зацепления гнездо крышек Т за счет перемещения седла 261 в направлении двойной стрелки f261, служит (как будет пояснено более подробно ниже) для правильной ориентации каждой пробирки Р для осуществления различных стадий измерения скорости осаждения эритроцитов.
Различные приводы и система считывания, представленная видеокамерой 253, соединены с блоком 275 управления, изображенным лишь схематично.
Указанное выше устройство работает следующим образом. Штабель штативов R помещается на поверхность 203А поддона 203 (смотри фиг.20). Различные штативы R загружаются в магазин 221 с помощью последующих ходов плунжера 205. Для обеспечения обратного хода плунжера 205 без столкновения с расположенными над ним штативами, весь узел 205-213 опирается на подвижный элемент 214, который перемещается вертикально в направлении двойной стрелки f214 (смотри фиг.20), так что плунжер 205 может уходить с поверхности 203А, когда он возвращается назад после толкания отдельного штатива, в соответствующее гнездо 235 в положении 235А магазина 221.
С помощью последовательно выполняемых операций загрузки все или некоторые гнезда 235 в магазине 221 постепенно загружаются при их прохождении перед положением 235А загрузки, совпадающем с прорезью 219 (смотри фиг.19). После загрузки всех штативов, для которых подлежит выполнять анализ, магазин 221 перемещается со скоростью, подходящей для вызывания встряхивания проб, содержащихся в единичных пробирках Р в каждом штативе R. Движение магазина, вызванное приводным колесом 225, воздействующим на цепь 223, продолжается в течение времени, достаточно длительного для обеспечения достаточного встряхивания некоторых или всех проб, т.е. тех, которые содержатся в штативах, подлежащих переводу первыми в зону осаждения. Когда штативы необходимо переводить в указанную зону, плунжер (не изображен) поднимает каждый штатив, занимающий положение 235В, и переносит его в гнездо 247, занимающее положение 247А в зоне осаждения. Все гнезда 247, занимающие верхний участок 241S конвейера 214, заполняются при последующих шагах конвейера 223 и конвейера 241. Затем можно начинать считывания пробирок Р, содержащихся в штативах R в положении 247В, т.е. в штативе, который был загружен первым. Если время, прошедшее между загрузкой штатива в зону осаждения и моментом, когда он приходит в зону считывания, не совпадает со временем, необходимым для осаждения, то устройство может удерживать конвейер 241 остановленным в течение времени, необходимого для завершения осаждения в пробах.
Считывание начинается с расположения видеокамеры 253 в одном из двух конечных положений. В показанном примере выполнения (фиг.26) видеокамера находится в левом положении и тем самым начинает считывание пробирок, начиная с пробирки, расположенной слева в штативе R в положении 247В. Пробирка Р может быть специальной пробиркой для анализа скорости обнаружения или же пробиркой общего назначения, т.е. пробиркой для полного анализа крови. Обычно все пробирки Р, находящиеся в данном штативе, принадлежат к одному типу, и все штативы в одной и той же партии обработки предпочтительно содержат пробирки одинакового типа. Это означает, что все пробирки, содержащиеся в устройстве, в целом принадлежат к типу, специально предназначенному для измерения скорости осаждения эритроцитов, или к типу для полного анализа крови. Используя программное обеспечение для обработки данных, содержащееся в блоке 275, видеокамера может распознавать каждый тип пробирки Р, расположенной перед ней, в каждом случае. Вообще говоря, пробирки различных типов могут быть смешаны внутри одного и того же штатива, поскольку устройство способно распознавать тип пробирки, находящейся перед видеокамерой в каждый момент времени.
Распознавание типа пробирки может быть важным, когда (что обычно имеет место) антикоагулянт, предусмотренный в пробирках для полного анализа крови, не одинаков с антикоагулянтом, используемым в пробирках для измерения скорости осаждения эритроцитов. С помощью блока 275 управления и видеокамеры 253 устройство способно распознавать тип пробирки и тем самым устанавливать, необходимо ли применять алгоритм коррекции для измерения скорости осаждения эритроцитов, в случае использования антикоагулянта типа K3EDTA, или же измерения можно регистрировать без применения алгоритма коррекции. Можно также осуществлять это управление вручную с помощью интерфейса пользователя, в частности, когда пробирки в данной партии для обработки все являются одинаковыми.
Вместо использования обработки изображения тип пробирки Р можно также распознавать, например, посредством считывания информации, содержащейся в ретрансляторе, связанном с данным штативом, приходящим в зону считывания. В этом случае в зоне считывания имеется также антенна для считывания содержимого ретранслятора внутри штатива.
Этикетка со штрихкодом или другим машинно-считываемым кодом, прикрепленная к пробирке, должна считываться перед считыванием скорости осаждения эритроцитов на данной пробирке Р перед видеокамерой 253. Указанная этикетка обозначена позицией Е на фиг.27, в то время как штрихкод, напечатанный на этикетке, обозначен позицией СВ. Этикетка Е может быть прикреплена к корпусу пробирки (что является обычным для пробирок для полного анализа крови) или к горлышку вблизи пробки Т указанной пробирки (что часто типично для пробирок, предназначенных специально для измерения скорости осаждения эритроцитов), или же на предусмотренной специально для этой цели подвеске на пробирке.
Штрихкод СВ содержит информацию, которая позволяет соотносить единичную пробу внутри пробирки с данным пациентом, кому принадлежит проба. Это позволяет устройству передавать данные анализа вместе с данными пациента в процессор обработки данных, с которым оно соединено. Штрихкод содержит также информацию, относящуюся к типу подлежащего выполнению анализа для пробы, содержащейся в пробирке. В действительности может быть, что данная пробирка предназначена для выполнения тестов, отличных от тестов соседних пробирок. Может быть также, что данная пробирка Р не должна подвергаться измерению скорости осаждения эритроцитов, в этом случае устройство 201 может пропускать считывание пробирки, содержащей пробу, для которой нет необходимости в измерении скорости осаждения эритроцитов.
Для считывания информации, содержащейся в штрихкоде СВ, пробирку Р необходимо ориентировать так, чтобы этикетка Е находилась перед видеокамерой 253. Хотя правильная ориентация пробирок для этой цели может выполняться персоналом лаборатории, в соответствии с показанным предпочтительным варианта выполнения устройства, согласно изобретению зона 251 считывания содержит систему 261-271 для выполнения угловой ориентации пробирки вокруг собственной оси и приведения этикетки Е в положение считывания. Таким образом, после расположения видеокамеры 253 перед первой пробиркой Р штатива R в положение считывания, седло 261 опускается вниз, пока штифт 271 не войдет в зацепление внутри соответствующего гнезда с пробкой Т пробирки Р. Штифт 271 поворачивается с помощью электродвигателя 263, пока видеокамера не «увидит» этикетку Е внутри своего поля обзора. Затем поворот можно прервать, и видеокамера считывает информацию, содержащуюся в штрихкоде СВ, с помощью программного обеспечения обработки изображения.
Если проверяемая пробирка содержит пробу, для которой необходимо выполнять измерение скорости осаждения эритроцитов, то видеокамера продолжает считывание содержимого пробирки. Для этого сначала необходимо удалить препятствие, образуемое этикеткой Е, расположенной перед видеокамерой. Для этой цели снова включается электродвигатель 263 и он снова поворачивает пробирку Р вокруг ее оси для перевода этикетки Е на сторону, противоположную видеокамере 253. Таким образом, видеокамера может видеть содержимое пробирки (через прорезь, предусмотренную в штативе R, которая позволяет также считывать этикетку Е), и проверяет высоту, на которой происходит разделение внутри пробирки осадка и сыворотки. Как хорошо известно, эта высота является мерой скорости осаждения эритроцитов, выводимой из времени осаждения (фиксированной для всех проб) и высоты, на которой происходит указанное разделение, относительно полной высоты пробы.
На основе изображения внутри пробирки Р, снятого видеокамерой 253, программное обеспечение обработки изображения, находящееся в блоке 275, определяет скорость осаждения эритроцитов для единичной пробы Р. Когда пробирка Р является пробиркой для полного анализа крови, то при вычислении принимается во внимание природа антикоагулянта, и в блоке 275 применяется алгоритм корреляции для осуществления вычисления.
После завершения этого процесса седло 261 поднимается для вывода из зацепления штифта 271 с крышкой Т пробирки Р, каретка 255 переводится в шаговый режим для перевода видеокамеры 253 перед соседней пробиркой и тем самым повторения указанного выше процесса со следующей пробиркой.
Эти процессы завершаются для всех пробирок, содержащихся в штативе R в положении 247В, когда видеокамера 253 придет к последней пробирке в обрабатываемом штативе.
После завершения считывания пробирок в штативе R в положении 247В, штатив снова толкается (с помощью не изображенного плунжера) в гнездо 235 конвейера 223, находящееся в положении 235С (смотри фиг.21).
Затем конвейер 241 перемещается на один шаг вперед для приведения следующего штатива в положение считывания, а пустого гнезда 247 - в положение 247А, где следующий штатив (если он имеется), приходящий из положения 235В магазина 221, вставляется с помощью предусмотренного плунжера (не изображен).
Как только обработанный штатив приходит в положение 235В, то он выбрасывается специальным плунжером через указанную выше прорезь 237.
Выше было приведено описание устройства, в котором используется видеокамера и программное обеспечение обработки изображения для выполнения всех считываний как информации, содержащейся в этикетке, прикрепленной к единичным пробиркам, так и уровня осадка внутри каждой пробирки. В этом варианте выполнения видеокамеру можно также использовать (как указывалось выше) для распознавания типа пробирки, используемой для размещения пробы.
Однако это не является единственно возможным решением. Можно применять также другие виды систем для считывания как информации на этикетках, так и содержимого пробирок.
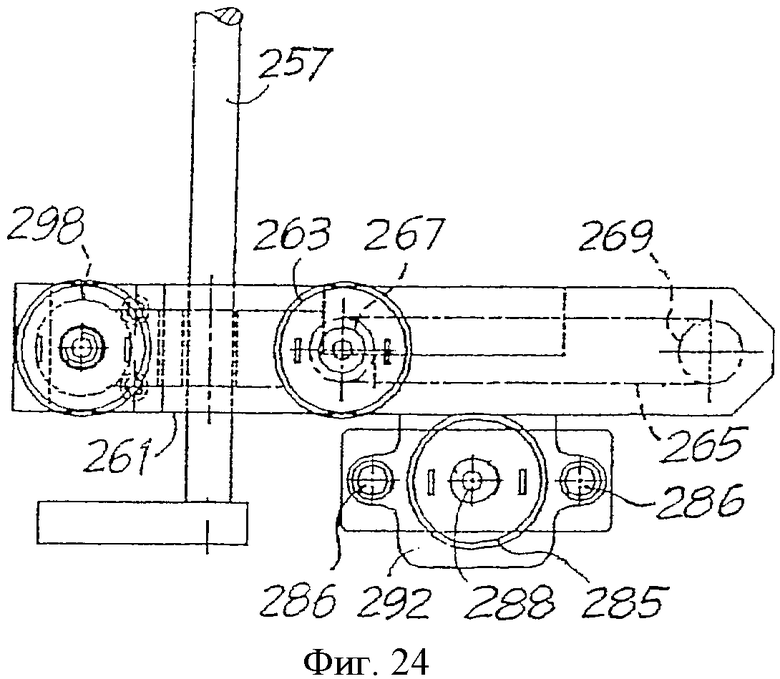
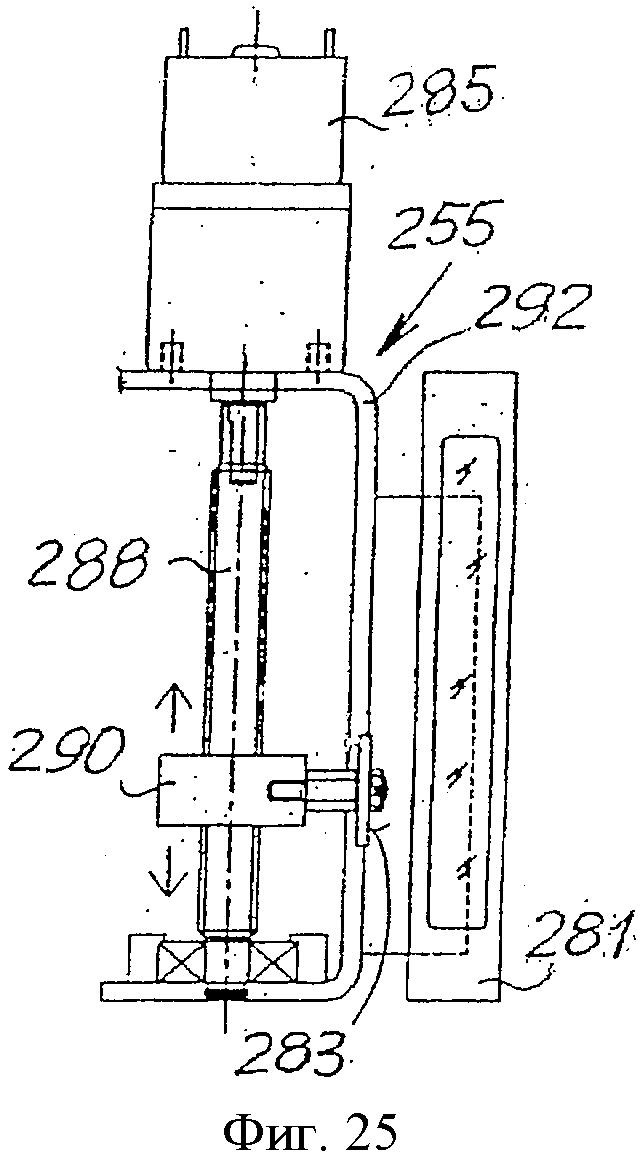
Другое решение показано на фиг.22-25, где показаны также детали приводных электродвигателей, которые можно использовать также в варианте выполнения, показанном на фиг.26 и 27, но которые не изображены в последнем случае для упрощения представления.
В варианте выполнения, показанном на фиг.22-25, видеокамера 253 заменена устройством считывания штрихкода, обозначенным в целом позицией 281, и емкостным датчиком, обозначенным позицией 283. Устройство 281 считывания штрихкода установлено на каретке или седле, снова обозначенном позицией 255, эквивалентным каретке 255, несущей видеокамеру 253 и перемещающейся по горизонтальным направляющим 257. Каретка 255 с устройством 281 считывания штрихкода перемещается вдоль направляющих 257 в направлении двойной стрелки f255 с помощью винтовой штанги (не изображена). Емкостный датчик 283 способен перемещаться вверх и вниз в направлении двойной стрелки f283, при этом перемещение осуществляется с помощью электродвигателя 285, установленного на каретке 255. Движение направляется с помощью вертикальных направляющих брусков 286 с расположенной между ними резьбовой штангой 288, вращаемой электродвигателем 285, в зацеплении с которой находится гайка 290 с мелкой резьбой, прочно соединенная с емкостным датчиком 283. Направляющие бруски 286, резьбовая штанга 288 и электродвигатель 285 расположены на фасонном профиле 292, образующем часть каретки 255 или прочно соединенном с ней.
Также как в предыдущем варианте выполнения, здесь снова вертикальные бруски или направляющие 259 прочно прикреплены к каретке 255, которая несет седло 261 с электродвигателем 263 для приведения во вращение штифта 271 через передачу 265, 267, 269. Движением вверх и вниз седла 261 управляет резьбовая штанга 294, которая входит в зацепление с гайкой 296 с мелкой резьбой, прочно скрепленной с кареткой 255. Резьбовая штанга 294 вращается электродвигателем 298, опирающимся на седло 261 (смотри также фиг.24).
Работа устройства, снабженного системой считывания, показанной на фиг.22-25, во многом одинакова с вариантом выполнения, описание которого приведено выше со ссылками на фиг.26 и 27, за исключением другого способа считывания информации и кода на этикетке Е пробирки Р. Действительно, в этом случае устройство 281 считывания штрихкода используется лишь для считывания информации, напечатанной в формате штрихкода на этикетке Е, прикрепленной к пробирке Р или ее пробке Т. Поворотный штифт 271 снова используется для правильной угловой ориентации пробирки Р вокруг ее собственной оси для обеспечения ее считывания. Прохождение по высоте устройства 281 считывания штрихкода является достаточным для считывания штрихкода, независимо от его положения вдоль длины пробирки Р и ее пробки Т.
После считывания содержимого этикетки Е емкостной датчик 283 скользит вертикально в направлении стрелки f283 сверху вниз или наоборот снизу вверх и считывает содержимое пробирки с идентификацией зоны разделения между частью, занимаемой плазмой, и частью, занимаемой осадком, в пробе, содержащейся в пробирке. Природа емкостного датчика устраняет необходимость повторного поворачивания пробирки для перемещения этикетки Е из зоны считывания датчика, хотя поворачивание является существенным в случае использования видеокамеры.
В этом случае, поскольку отсутствует видеокамера и соответствующее программное обеспечение обработки изображения, распознавание типа пробирки Р должно выполняться по-другому по сравнению с ситуацией, описанной применительно к фиг.26 и 27, для установления, какой процесс следует применять для вычисления скорости осаждения эритроцитов. Для этой цели можно использовать ретранслятор, связанный со штативом, и соответствующее устройство считывания, расположенное в зоне считывания. В этом случае оператор снова может, как указывалось выше, задавать вручную тип используемых пробирок, если все пробирки в различных штативах данной партии одного и того же типа.
Интерпретация кода на пробирке, например штрихкода, также может говорить системе о типе используемых пробирок.
Из приведенного выше описания следует, что данное изобретение позволяет преодолевать недостатки обычных способов и устройств за счет обеспечения считывания скорости осаждения эритроцитов при любом типе пробирки, даже при типе, используемом для полного анализа крови, без необходимости извлечения пробы из пробирки и без необходимости извлечения пробы из штатива, который ее содержит.
Понятно, что на чертежах показан лишь пример, приведенный только для практической иллюстрации изобретения, который может изменяться по форме и конструкции без отхода от идеи и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕР, СОДЕРЖАЩИЙ ПРОМЫВНОЙ РАСТВОР, ИСПОЛЬЗУЕМЫЙ ДЛЯ АНАЛИЗАТОРА КРОВИ | 2012 |
|
RU2543601C2 |
| СПОСОБ МЕДИЦИНСКОГО АНАЛИЗА | 2013 |
|
RU2637395C2 |
| УСТРОЙСТВО И СПОСОБ МИКРОБИОЛОГИЧЕСКОГО АНАЛИЗА БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2008 |
|
RU2531047C2 |
| УСТРОЙСТВО ДЛЯ ПРОСЛЕЖИВАЕМОЙ МАРКИРОВКИ КОНТЕЙНЕРОВ С БИОЛОГИЧЕСКИМИ МАТЕРИАЛАМИ | 2013 |
|
RU2637151C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ КАЧЕСТВА КОМПОНЕНТОВ КРОВИ С ПРИМЕНЕНИЕМ ШТРИХОВЫХ КОДОВ | 1997 |
|
RU2129882C1 |
| ДИАГНОСТИЧЕСКАЯ СИСТЕМА И КОМПОНЕНТЫ | 2011 |
|
RU2587328C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОСЕДАНИЯ ЭРИТРОЦИТОВ И ДРУГИХ СВЯЗАННЫХ ПАРАМЕТРОВ | 2019 |
|
RU2753649C1 |
| Мобильный съемный комплекс и способ для автоматического определения наличия гемолиза и/или хилеза в образцах крови | 2023 |
|
RU2819131C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ДЕРЖАТЕЛЕЙ ЕМКОСТЕЙ С ПРОБАМИ БИОЛОГИЧЕСКОЙ ЖИДКОСТИ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АНАЛИЗА, СОДЕРЖАЩАЯ ТАКУЮ КОНВЕЙЕРНУЮ СИСТЕМУ | 2017 |
|
RU2719309C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСМОТИЧЕСКОЙ СТОЙКОСТИ ЭРИТРОЦИТОВ | 2014 |
|
RU2580300C1 |
Группа изобретений относится к измерению скорости осаждения частиц в биологических жидкостях, в особенности к измерению скорости осаждения эритроцитов. Устройство для измерения скорости осаждения в биологических жидкостях и, в частности, скорости осаждения эритроцитов в пробах крови, содержит держатели для пробирок, содержащих пробы биологических жидкостей; встряхивающие устройства для встряхивания пробирок; по меньшей мере, один детектор для измерения уровней внутри пробирок, причем держатели образованы в непрерывном гибком элементе, задающем замкнутый путь, вдоль которого расположены встряхивающие устройства и, по меньшей мере, один детектор. Представлен также способ измерения скорости осаждения в биологических жидкостях. Достигается повышение надежности и упрощение анализа. 2 н. и 43 з.п. ф-лы, 28 ил.
по меньшей мере, одна зона встряхивания, в которой предусмотрены встряхивающие устройства, по меньшей мере, одна зона осаждения, и, по меньшей мере, одна зона считывания, в которой установлен детектор.
по меньшей мере, одна зона встряхивания, в которой предусмотрены встряхивающие устройства, по меньшей мере, одна зона осаждения, и, по меньшей мере, одна зона считывания, в которой установлен детектор.
| US 5133208 A, 28.07.1992 | |||
| Коллектор фракций | 1981 |
|
SU1031499A1 |
| Коллектор фракций | 1983 |
|
SU1125046A1 |
| 0 |
|
SU390738A1 | |
| RU 9912003 A, 27.10.2001 | |||
| JP 10260118 A, 29.09.1998 | |||
| EP 0289789 A1, 09.11.1988 | |||
| US 5526705 A, 18.06.1996. | |||

