Изобретение относится к области медицинского анализа.
В частности, оно касается способа медицинского анализа.
В настоящем описании под «медицинским анализом» следует понимать процесс обработки по меньшей мере одной пробы, взятой у человека или животного. Такими пробами являются, например, пробы телесных жидкостей (кровь, моча, лимфа, слюна и т.д.), клеток, биологических тканей или органов.
Примерами медицинских анализов являются иммуногематологические анализы, такие как определение группы крови, тесты на антитела, такие как иррегулярные агглютинины, или тесты для определения совместимости между донором и реципиентом (перекрестная проба).
Настоящее описание относится, в частности, к способу медицинского анализа in vitro.
В настоящее время медицинские анализы осуществляют при помощи аппаратов, называемых также автоматическими анализаторами, позволяющими автоматизировать некоторые операции, которые в противном случае пришлось бы производить вручную одним или несколькими пользователями в лабораториях для медицинских анализов, например, загружать в центрифугу емкости с пробами крови или с другими пробами.
Такие автоматы, применяемые в процессах медицинского анализа, известны, например, из документов US 6162399, JP 2010054232 и ЕР 2145685. Во всех этих автоматах применяются роботы картезианского типа.
Эти автоматы с использованием картезианских роботов, как правило, ограничиваются управлением ограниченного числа постов конкретной обработки.
Следовательно, их размеры неизбежно увеличиваются, если необходимо увеличить число их рабочих постов. Однако площадь для размещения автоматов становится все более ограниченной с учетом диверсификации услуг в существующих аналитических лабораториях.
Кроме того, особенностью роботов картезианского типа является упрощение моделирования рабочего пространства, при котором учитывается только положение предметов в пространстве независимо от их ориентации. Ограничительный характер этого подхода приводит к тому, что ориентацию располагаемых предметов предполагают известной заранее, фиксированной и воспроизводимой на большом количестве серийно выпускаемых автоматов. Поэтому монтаж автомата необходимо осуществлять с повышенной степенью точности.
Задача изобретения состоит в разработке способа медицинского анализа, в котором повторяющиеся действия пользователей, которые занимают время и являются источниками ошибок, являются максимально автоматизированными и требуют лишь ограниченного рабочего пространства.
В связи с этим объектом изобретения является способ медицинского анализа, в котором используют медицинский автоматический анализатор, оснащенный многоосным роботом, содержащим шарниры, определяющие по меньшей мере шесть осей вращения, и выполненным с возможностью перемещения и/или ориентирования конечного звена по шести степеням свободы, при этом конечное звено содержит захватный орган, выполненный с возможностью удержания емкости, при этом указанный способ медицинского анализа содержит, по меньшей мере, следующие последовательные этапы:
- готовят емкость, предварительно заполненную предназначенной для обработки пробой, взятой у человека или животного,
- указанную емкость перемещают в направлении по меньшей мере одного поста обработки медицинского автоматического анализатора при помощи многоосного робота,
- пробу обрабатывают в посту обработки,
- емкость перемещают в направлении поста получения изображений и результаты обработки выводят на интерфейс пользователя.
Иначе говоря, изобретение относится к использованию в медицинском автоматическом анализаторе многоосного робота, содержащего шарниры, определяющие по меньшей мере шесть осей вращения, и выполненного с возможностью перемещения и/или ориентирования конечного звена по шести степеням свободы, при этом конечное звено содержит захватный орган, выполненный с возможностью удержания емкости, при этом медицинский автоматический анализатор выполнен с возможностью осуществления способа медицинского анализа, содержащего, по меньшей мере, этапы, на которых готовят емкость, предварительно заполненную предназначенной для обработки пробой, взятой у человека или животного, указанную емкость перемещают в направлении по меньшей мере одного поста обработки медицинского автоматического анализатора при помощи многоосного робота, пробу обрабатывают в посту обработки, и емкость перемещают на пост получения изображений, и результаты обработки выводят на интерфейс пользователя.
В настоящем описании под постом обработки следует понимать любой пост, на котором обрабатывают емкость и, в частности, содержащуюся в ней пробу. Под обработкой следует понимать любое действие, предназначенное для наблюдения или контроля емкости или введения в нее вещества, в частности, реактива или изменения физических свойств (температуры, однородности и т.д.) содержимого емкости.
Таким образом, в ходе этапа обработки емкость можно доставлять в зону пипетирования для введения в нее реактива, в инкубатор для инкубации, в центрифугу для центрифугирования и т.д.
Кроме того, в настоящем описании под постом получения изображений следует понимать любое устройство, обеспечивающее получение изображения, такого как фотографическое изображение, например, емкости и, в частности, обработанной пробы. Пост получения изображений результатов обработки может представлять собой, в частности, камеру для съемки изображений.
Наконец, под интерфейсом пользователя следует понимать любое устройство, с которым может взаимодействовать оператор и которое содержит орган визуализации, такой как экран. Интерфейс пользователя может не входить в состав медицинского автоматического анализатора. Изображения обработанной емкости, получаемые при помощи поста получения изображений, поступают в интерфейс пользователя для обеспечения визуального наблюдения емкости и, в частности, пробы или результатов реакции, которые были интерпретированы программой на основании полученных изображений.
Согласно варианту осуществления изобретения обработка пробы включает в себя введение в емкость реактива, способного реагировать с обрабатываемой пробой.
Когда реактив вводят в емкость и когда он вступает в контакт и, возможно, смешивается с обрабатываемой пробой, между пробой и реактивом происходит реакция, при этом указанная реакция может быть положительной или отрицательной.
Пост получения изображений снимает изображения результатов реакции, происходящей в емкости между обрабатываемой пробой и реактивом, введенным в емкость. Снятые изображения могут, таким образом, свидетельствовать о так называемой «положительной» реакции или о так называемой «отрицательной» реакции. Эти снятые изображения или результаты, вытекающие из интерпретации этих изображений программой, выводятся, как и в предыдущем случае, на устройство визуализации интерфейса пользователя. В частности, снятые изображения или результаты реакции, вытекающие из интерпретации этих изображений программой, могут свидетельствовать о степени реагирования между пробой и реактивом.
В некоторых вариантах осуществления определенные этапы осуществляют при помощи многоосного робота до этапов подготовки и обработки емкости с пробой. Например, способ может содержать предварительный этап, в ходе которого пробу извлекают из сосуда для хранения, в частности из пробирки, и вводят в емкость при помощи многоосного робота.
Способ может также содержать этапы обработки емкости до введения в нее пробы, в частности идентификацию емкости посредством визуального наблюдения идентификатора указанной емкости, например, такого как печатный штрихкод, определение размеров емкости и т.д.
В некоторых вариантах осуществления способ содержит этап анализа, в частности автоматического анализа выведенных на экран результатов обработки. В частности, способ может содержать этап интерпретации, предназначенный для получения информации, в частности о физиологическом или патологическом состоянии пациента или о врожденной аномалии.
Например, пост получения изображений результатов обработки пробы может быть оснащен программой, выполненной с возможностью анализа результатов обработки. Такая программа может быть, в частности, установлена на компьютере интерфейса пользователя.
В случае когда этап обработки пробы включает в себя введение реактива в емкость, анализ результатов реакции, например, программой позволяет, в частности, автоматически получить заключение о положительном или отрицательном характере реакции.
Способ медицинского анализа в соответствии с изобретением находит свое применение, в частности в иммуногематологии, например, при тестах определения группы крови, обнаружения антител, таких как иррегулярные агглютинины или определения совместимости между донором и реципиентом.
Другими областями применения заявленного способа являются вирусология, микробиология, бактериология, микология, паразитология, контроль качества для лаборатории диагностики in vitro, обнаружение аутоиммунных заболеваний, мониторинг диабета, обнаружение генетических заболеваний, токсикология и мониторинг физиологического или патологического состояния, в частности, после терапевтического лечения.
Предпочтительно в рамках заявленного способа используют многоосный робот, закрепленный на неподвижном цоколе и содержащий исключительно вращательные шарниры.
Емкость, удерживаемая и перемещаемая многоосным роботом, может быть, например, гелевой картой. Обычно гелевая карта представляет собой емкость, содержащую корпус, в котором сформированы несколько смежных реакционных микропробирок, расположенных в один ряд и закрытых крышками. Как правило, микропробирки гелевой карты содержат гель, предназначенный для интерпретации результатов реакции, протекавшей в микропробирках. Например, корпус гелевой карты выполнен из пластика. Кроме того, как правило, гелевая карта содержит от 6 до 8 микропробирок. Понятно, что тестируемую пробу вводят по меньшей мере в одну микропробирку такой гелевой карты.
В случае, когда с обрабатываемой пробой должен взаимодействовать реактив, его можно ввести по меньшей мере в одну микропробирку гелевой карты. Реактивом может быть, например, тестовая суспензия эритроцитов, помещаемая в емкость с тестируемой плазмой, или тестовая сыворотка, помещаемая в емкость с тестируемой суспензией эритроцитов.
Согласно варианту осуществления заявленного способа емкость доставляют на пост получения изображения результатов обработки при помощи многоосного робота.
В этом случае пост получения изображений результатов обработки встроен в медицинский автоматический анализатор. Понятно, что эти полученные изображения затем поступают в интерфейс пользователя для выведения этих результатов на экран.
Согласно варианту осуществления перед этапом выведения на экран результатов обработки емкость или любой другой сосуд перемещают при помощи многоосного робота на пост контроля, связанный с интерфейсом пользователя.
В настоящем описании под постом контроля можно понимать любое устройство, обеспечивающее получение изображений, позволяющих осуществлять контроль емкости и входящее в состав медицинского автоматического анализатора.
Под контролем следует понимать, например, идентификацию емкости, в частности идентификатора емкости, например, такого как напечатанный на ней штрихкод, контроль уровня жидкостей в емкости, определение размеров емкости, в частности ее высоту и ее диаметр, контроль состояния воздушных зазоров, то есть воздушных пузырьков, изолирующих жидкость или жидкости, помещаемые в емкость, или контроль качества содержимого емкости, в частности геля. Пост контроля может также снимать изображения других предметов, перемещаемых многоосным роботом, отличных от емкости. Например, он обеспечивает определение уровня жидкости во флаконе с реактивом.
В некоторых вариантах осуществления пост получения изображений результатов обработки и пост контроля представляют собой единый пост, связанный с интерфейсом пользователя для выведения на экран результатов обработки, то есть снятых изображений, или результатов, вытекающих из интерпретации этих изображений программой.
Согласно примеру пост контроля содержит камеру. После этого полученные контрольные изображения выводятся на экран интерфейса пользователя или на экран пользователя выводится сообщение, касающееся этих изображений.
В некоторых вариантах осуществления емкость доставляют при помощи многоосного робота в инкубатор медицинского автоматического анализатора.
В некоторых вариантах осуществления емкость перемещают при помощи многоосного робота в зону пипетирования емкости медицинского автоматического анализатора для введения в нее реактива.
В некоторых вариантах осуществления захватный орган многоосного робота используют для удержания флакона с реактивом.
В некоторых вариантах осуществления флакон с реактивом перемещают при помощи робота в зону пипетирования реактива.
В некоторых вариантах осуществления флакон с реактивом можно переворачивать и/или встряхивать при помощи многоосного робота для получения суспензии.
В некоторых вариантах осуществления многоосный робот регулирует четкость камеры поста контроля и/или поста получения изображений результатов обработки.
В некоторых вариантах осуществления многоосный робот поворачивает емкость на угол 180°, чтобы произвести съемку каждой стороны емкости.
В некоторых вариантах осуществления автоматический анализатор содержит множество постов обработки, распределенных на 360° вокруг многоосного робота.
В некоторых вариантах осуществления многоосный робот имеет доступ к каждому посту обработки автоматического анализатора.
В некоторых вариантах осуществления емкость перемещают при помощи многоосного робота к сборной емкости, предназначенной для сбора отходов.
В некоторых вариантах осуществления способ содержит этап предварительного определения параметров, в ходе которого заранее определяют зоны, в которых многоосный робот может перемещаться, и зоны, в которые многоосный робот не должен проникать, в частности для предупреждения движения над некоторыми зонами медицинского автоматического анализатора. Эта функция является исключительно важной для снижения рисков перекрестного загрязнения различных проб, разбавителей и/или реактивов.
В некоторых вариантах осуществления конечное звено робота содержит пьезоэлектрический щуп.
В некоторых вариантах осуществления проба содержит вещество из группы, в которую входят жидкость, клетка, биологическая ткань или орган человека или животного.
В частном варианте осуществления способ содержит следующие этапы:
- при помощи многоосного робота емкость, предварительно заполненную тестируемой пробой, перемещают в зону пипетирования для введения реактива в указанную емкость,
- реактив вводят в емкость,
- при помощи многоосного робота емкость помещают в инкубатор,
- производят инкубацию емкости,
- при помощи многоосного робота емкость перемещают из инкубатора в центрифугу,
- производят центрифугирование емкости,
- емкость перемещают на пост получения изображений результатов обработки, и результаты выводят на экран при помощи интерфейса пользователя.
В некоторых вариантах осуществления перед этапом введения реактива в емкость флакон с реактивом переворачивают и/или встряхивают при помощи многоосного робота, чтобы привести реактив в состояние суспензии.
В некоторых вариантах осуществления перед этапом центрифугирования емкость перемещают при помощи многоосного робота на пост контроля для проверки воздушного зазора.
В некоторых вариантах осуществления многоосный робот используют для приведения в действие элемента медицинского автоматического анализатора.
В некоторых вариантах осуществления контролируют ориентацию многоосного робота в зависимости от характера перемещаемого предмета, в частности, чтобы избежать перелива или взбалтывания жидкости в случае, когда робот перемещает емкость, заполненную жидкостью.
В некоторых вариантах осуществления контролируют скорость многоосного робота в зависимости от характера перемещаемого предмета, в частности, чтобы избежать перелива или взбалтывания жидкости в случае, когда робот перемещает емкость, заполненную жидкостью.
В некоторых вариантах осуществления измеряют силу, прикладываемую захватным органом к перемещаемому предмету.
В некоторых вариантах осуществления многоосный робот используют для встряхивания предмета (например, емкости с разбавителем), в частности для приведения в состояние суспензии или перемешивания жидкости в случае, когда предметом является емкость, заполненная жидкостью.
Объектом изобретения является также медицинский автоматический анализатор, выполненный с возможностью осуществления описанного выше способа, в частности медицинский автоматический анализатор для анализа in vitro, например, в иммуногематологии, содержащий многоосный робот, содержащий шарниры, определяющие по меньшей мере шесть осей вращения, и выполненный с возможностью перемещения и/или ориентирования конечного звена по шести степеням свободы.
Кроме такого многоосного робота, медицинский автоматический анализатор в соответствии с изобретением содержит органы хранения и/или анализа, обеспечивающие, в частности, хранение емкостей (пробные пробирки, емкость с разбавителем, емкость с реактивом и т.д.) и/или получение изображений, в частности результата обработки.
Робот, используемый в рамках настоящего изобретения, является многоосным роботом наподобие человеческой руки и имеет шесть степеней свободы (три степени свободы для перемещения и три степени свободы для ориентирования), позволяющих перемещать и ориентировать дистальный конец манипулятора или конечного звена в данном рабочем пространстве.
Таким образом, он охватывает рабочую зону (то есть зону маневра конечного звена), которую символически можно представить в виде сферы, при этом робот находится в центре этой сферы. Благодаря шести степеням свободы конечного звена можно учитывать не только реальное положение составных элементов автомата и управляемых им емкостей, но также их ориентацию в пространстве. Таким образом, конечное звено робота может достигать рабочих постов, находящихся в любом месте вокруг основания робота, и во всех направлениях пространства.
Следовательно, можно увеличить компактность рабочего пространства автомата, поскольку рабочие посты можно приблизить друг к другу.
С учетом предварительного изучения рабочего пространства и запоминания реальных координат каждого предмета в пространстве многоосный робот располагает надежной не виртуальной картиной автомата, что позволяет компенсировать дефекты геометрии, связанные с неточностями изготовления.
В предпочтительном варианте осуществления изобретения многоосный робот закреплен на неподвижном цоколе и содержит исключительно вращательные шарниры. Таким образом, перемещения робота обеспечиваются исключительно поворотными шарнирами.
В некоторых вариантах осуществления емкость перемещают при помощи многоосного робота до выходного магазина емкостей. Это манипулирование представляет интерес, когда необходимо отобрать емкость для ее контроля или для ее дальнейшего повторного использования (например, когда емкость является гелевой картой и если не все микропробирки указанной карты были обработаны).
В настоящем описании представлено несколько вариантов выполнения или осуществления. Вместе с тем, признаки, описанные в связи с каким-либо одним вариантом, можно применять для другого варианта выполнения или осуществления.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания неограничивающих примеров осуществления изобретения со ссылками на прилагаемые чертежи.
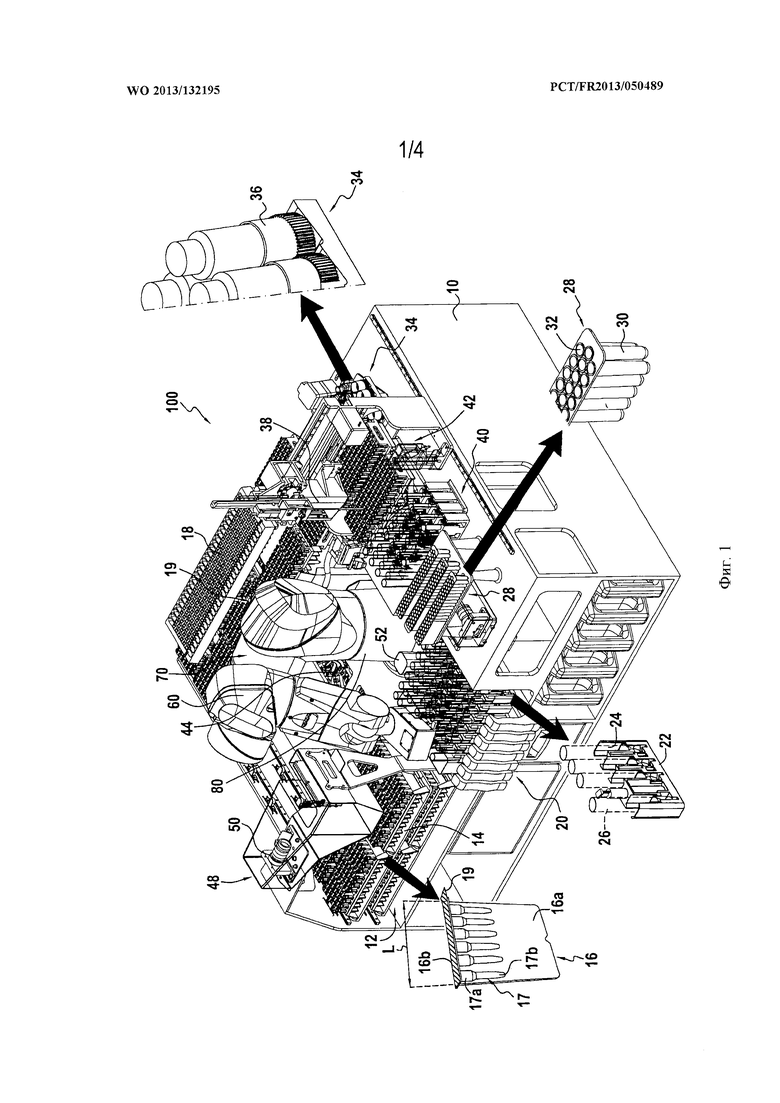
На фиг. 1 показан пример автомата, выполненного с возможностью обработки клинических проб для иммуногематологических анализов, вид в перспективе;
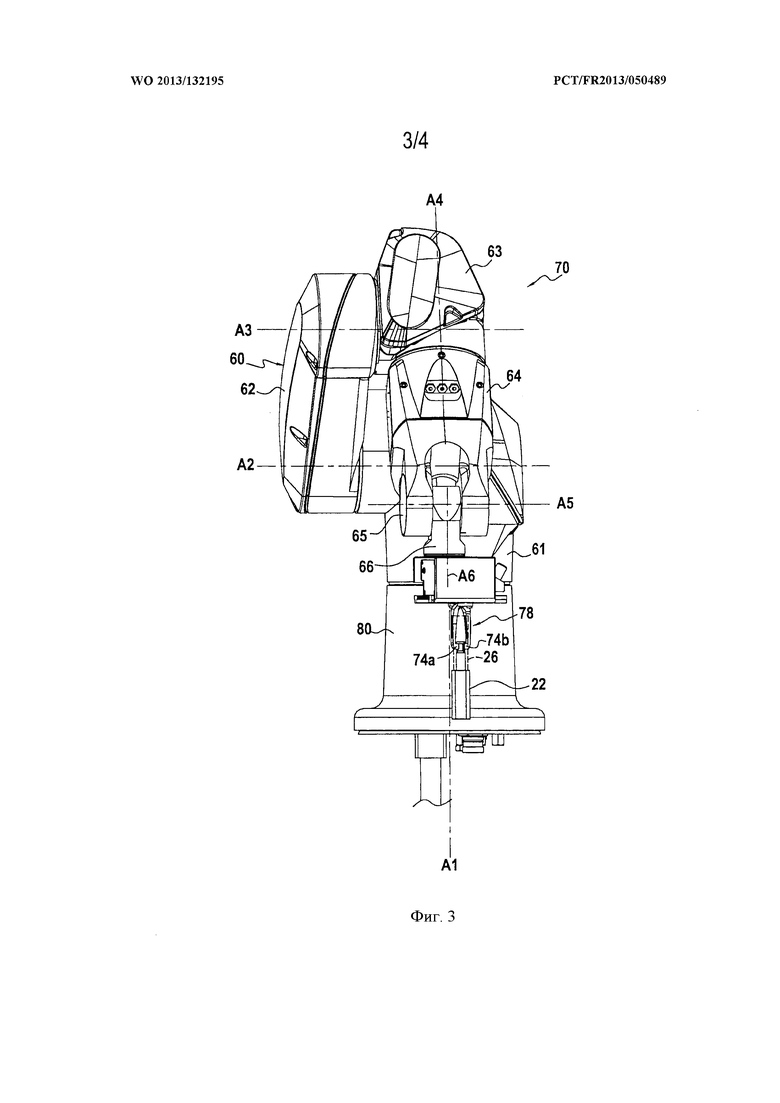
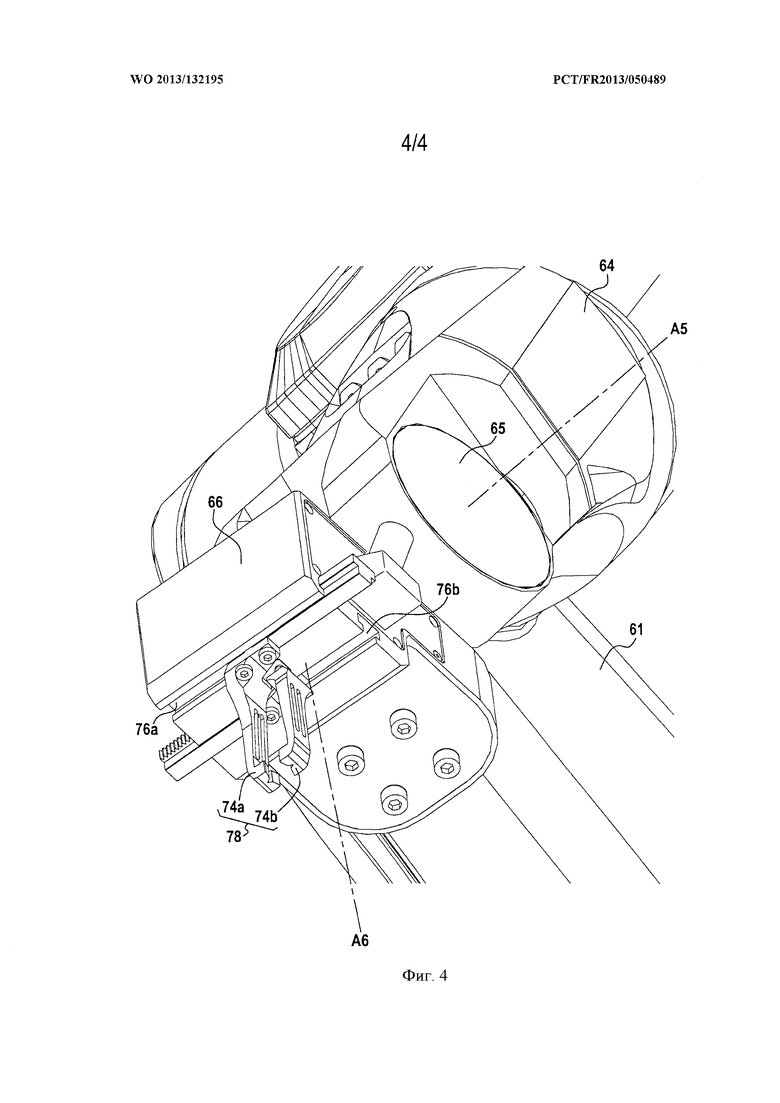
на фиг. 2 и 3 показан многоосный робот, изображенный на фиг. 1, вид в перспективе и спереди соответственно;
на фиг. 4 детально показано конечное звено многоосного робота, изображенного на фиг. 1.
На фиг. 1 показан медицинский автоматический анализатор, выполненный с возможностью тестирования проб крови.
В данном примере анализ, осуществляемый при помощи этого автомата, предназначен для выявления реакции между антигенами (субстанция, способная вызвать иммунную реакцию) и антителами (протеин кровяной сыворотки, секретируемый белыми кровяными тельцами, участвующими в иммунитете в присутствии антигена) посредством агглютинации.
Этот анализ применяют, в частности, в тестах фенотипирования группы крови, поиска антител, таких как иррегулярные агглютинины, и определения совместимости между донором и реципиентом.
Его можно применять двумя способами. Он может быть предназначен для определения присутствия или отсутствия антигенов на поверхности эритроцитов, и в этом случае тестовую сыворотку с известным составом антител вводят в контакт с эритроцитами тестируемого пациента. Он может быть также предназначен для определения присутствия или отсутствия конкретных антител в данной пробе, и в этом случае тестируемую пробу, которой обычно является сыворотка или плазма пациента, вводят в контакт с тестовыми эритроцитами.
В обоих случаях принцип, лежащий в основе анализа, не меняется.
Из пробной пробирки при помощи пипетки отбирают суспензию эритроцитов (тестовых или тестируемых). В случае необходимости эту суспензию можно предварительно получить путем введения эритроцитов в разбавитель, такой как физиологический раствор или любой другой соответствующий разбавитель.
Затем суспензию эритроцитов вводят в емкость, в частности в пробирку, содержащую гель. В данном примере суспензию вводят в микропробирку гелевой карты, причем гелевая карта обычно имеет множество микропробирок (как правило, 6 или 8), содержащих гель и изначально закрытых крышкой.
Раствор реактива, содержащий антитела, в частности в зависимости от случая плазму пациента или тестовую сыворотку, вводят при помощи пипетки во флакон, затем вводят в микропробирку гелевой карты.
После возможной инкубации гелевую карту помещают в центрифугу и подвергают центрифугированию.
Реакция считается положительной, если между антителами плазмы или сыворотки и поверхностными антигенами эритроцитов образуется специфическая связь и они образуют агтлютинат частиц.
Под действием центрифугирования в отсутствие агглютинации (то есть в случае отрицательной реакции) эритроциты проходят через гель, содержащийся в микропробирке гелевой карты, и концентрируются на дне микропробирки.
В присутствии агглютинации (то есть в случае положительной реакции), наоборот, эритроциты остаются на поверхности геля во время центрифугирования.
Чтобы пользователь мог визуально наблюдать результаты реакции, гелевую карту доставляют на пост получения изображений, который в данном случае содержит камеру, связанную с интерфейсом пользователя, для выведения на экран изображений результатов реакции. В данном примере интерпретация результатов реакции происходит автоматически, в частности при помощи соответствующей программы.
В других примерах анализ результатов производится непосредственно оператором, который наблюдает их либо невооруженным глазом, либо на устройстве визуализации интерфейса пользователя. Например, оператор может обнаруживать отсутствие или присутствие окрашенного осадка на дне микропробирки гелевой карты и сделать заключение о положительном или отрицательном характере реакции.
Медицинский автоматический анализатор 100, показанный на фиг. 1, содержит шасси 10, на котором установлено множество нижеперечисленных органов хранения и/или анализа для реализации различных вышеупомянутых операций:
- входной и выходной магазин 12 для кассет 14, в каждой из которых находится множество (например, двенадцать) гелевых карт 16, для флаконов 36 с реактивом и для емкостей 28 с разбавителем, при этом каждая емкость 28 с разбавителем содержит в данном случае выполненную путем литья под давлением деталь 30 с множеством полостей 32, закрытых крышками и заполненных разбавителем (в представленном примере на уровне входного магазина видны только кассеты с гелевыми картами; флаконы с реактивами и емкости с разбавителем видны в других местах автомата, которые будут описаны ниже);
- инкубатор 18;
- зона 19 подготовки наборов (называемых также «партиями») предназначенных для пипетирования гелевых карт;
- зона (не показана) хранения повторно используемых гелевых карт, то есть карт, в которых были использованы только некоторые микропробирки;
- зона 20 загрузки/выгрузки держателей пробных пробирок, при этом каждый держатель 22 пробных пробирок имеет цилиндрические гнезда 24, выполненные с возможностью размещения в них пробных пробирок 26;
- зона 34 пипетирования флаконов 36 с реактивом;
- пипеточный робот 38, в данном случае выполненный подвижным с тремя степенями свободы (в данном случае с тремя ортогональными осями поступательного движения, включая вертикальную ось, вдоль которой перемещается пипеточная игла) между зоной 40 пипетирования пробных пробирок 26 и емкостей 28 с разбавителем, зоной 42 пипетирования гелевых карт 16 и зоной 34 пипетирования флаконов 36 с реактивом;
- центрифуга 44 для гелевых карт;
- пост 48 получения изображений и контроля (в дальнейшем пост контроля), содержащий камеру 50, связанную с интерфейсом пользователя (не показан); и
- емкость или мусорный бак 52 для сбора предметов, таких как гелевые карты 16, пробные пробирки 22 и флаконы 36 для реактивов после использования (для большей ясности на фиг. 1 сборная емкость 52 показана не в масштабе).
В состав автоматического анализатора входит также робот 70, находящийся по существу в центре автомата 100, окруженный узлами вышеупомянутых элементов и оснащенный многоосным манипулятором 60, более подробно описанным ниже.
В данном примере, как более детально показано на фиг. 2, манипулятор 60 робота 70 содержит первый сегмент 61 манипулятора, проходящий от горизонтального цоколя 80, закрепленного на шасси 10 автомата 100. Первый сегмент 61 манипулятора находится по существу в центре автомата 100 и установлен с возможностью поворота относительно цоколя 80 вокруг по существу вертикальной первой оси А1.
Второй сегмент 62 манипулятора автомата, более наглядно показанный на фиг. 3, связан с концом первого сегмента 61 манипулятора, противоположным цоколю 80 автомата 100, и шарнирно установлен относительно первого сегмента манипулятора вокруг второй оси А2, перпендикулярной к первой оси А1.
Третий сегмент 63 манипулятора связан с концом второго сегмента 62 манипулятора, противоположным первому сегменту 61 манипулятора, и шарнирно установлен относительно второго сегмента 62 манипулятора вокруг третьей оси A3, параллельной А2.
Четвертый сегмент 64 манипулятора связан с третьим сегментом 63 манипулятора и установлен с возможностью поворота относительно него вокруг четвертой оси А4, перпендикулярной к третьей оси A3.
Пятый сегмент 65 манипулятора связан с четвертым сегментом 64 манипулятора и установлен с возможностью поворота относительно него вокруг пятой оси А5, перпендикулярной к четвертой оси А4.
Наконец, манипулятор 60 заканчивается шестым сегментом манипулятора или конечным звеном 66, связанным с концом пятого манипулятора 65, противоположным четвертому манипулятору 64. Шестой манипулятор 66 установлен с возможностью поворота относительно пятого манипулятора 65 вокруг шестой оси А6, перпендикулярной к пятой оси А5 и параллельной осям А2 и A3.
Благодаря шести осям вращения (или поворотным шарнирам) манипулятора 60, конечное звено 66 может достигать всех рабочих постов, распределенных вокруг него на 360°, на разных высотах и с разными ориентациями.
Следует отметить, что, согласно версии осуществления изобретения, многоосный робот может содержать более шести осей вращения.
Как показано на фиг. 2, конечное звено 66 содержит пьезоэлектрический щуп 72.
Во время изготовления автомата или в ходе операций обслуживания, благодаря шести осям вращения робота 70, щуп 72 исследует различные рабочие посты и запоминает реальные координаты в пространстве всех элементов, входящих в состав автомата 100. Таким образом, робот 70 знает все положения и ориентацию элементов и располагает надежной картиной автомата. Таким образом, геометрические погрешности, связанные с неточностями изготовления, не имеют никакого влияния на конечную работу автомата.
На своем нижнем конце конечное звено 66 дополнительно содержит две зажимные губки 74a, 74b, имеющие по существу L-образную форму, расположенные против друг друга и установленные с возможностью перемещения скольжением вдоль двух желобов 76a, 76b, направленных перпендикулярно к вышеуказанной оси А6 и параллельных между собой. Губки 74a, 74b образуют захватный орган или захват, который размыкается, когда они перемещаются, удаляясь друг от друга, и замыкается, когда они приближаются друг к другу.
Предпочтительно заявленный способ анализа содержит этап, в ходе которого робот 70 перемещает различные предметы (гелевые карты 16, флаконы 36 с реактивами, емкость 28 с разбавителем и т.д.), участвующие в описанном выше протоколе анализа, между различными рабочими постами автомата (пост контроля, зоны загрузки/выгрузки, зона пипетирования, мусорный бак и т.д.) при помощи своего захвата 78.
Предпочтительно заявленный способ анализа содержит этап, в ходе которого многоосный робот 70 удерживает и встряхивает предмет, например флакон 36 с реактивом, при помощи своего захвата 78, чтобы привести в состояние суспензии или перемешать содержащуюся в нем жидкость.
Предпочтительно заявленный способ анализа содержит этап, в ходе которого робот 70 переворачивает гелевую карту 16 на уровне поста 48 контроля, поворачивая ее на угол 180°, чтобы обеспечить съемку с каждой стороны.
Способ анализа в соответствии с изобретением может также содержать этап, в ходе которого многоосный робот приводит в действие элемент медицинского автоматического анализатора, например он перемещает люк открывания/закрывания центрифуги 44, перемещает входной и выходной магазин 12, чтобы сделать его доступным или недоступным для пользователя или доступным для отбора гелевых карт 16 многоосным роботом 70, или перемещает кольцо регулирования четкости камеры 50 поста 48 контроля во время операции регулирования четкости.
Другие этапы, которые могут быть задействованы в рамках заявленного способа анализа, описаны ниже со ссылками на фиг. 1.
Например, способ может содержать этап, на котором робот 70 перемещает держатель 22 пробных пробирок 26, заполненных эритроцитами пациента или суспензией таких эритроцитов, к посту 48 контроля для обнаружения присутствия пробирок 26, обнаружения пробок на пробирках 26, измерения диаметра и высоты пробирок 26, определения формы дна пробирок 26 или считывания идентификатора пробирок 26, например штрихкода.
Способ может также содержать этап, на котором робот 70 переносит держатель 22 пробирок от поста 48 контроля в зону 20 загрузки/выгрузки, чтобы пользователь мог исправить аномалию, обнаруженную на одной или нескольких пробирках 26, или в зону пипетирования пробных пробирок 26.
В случае необходимости после операции пипетирования способ может также содержать этап, в ходе которого робот 70 снова перемещает держатель 22 пробных пробирок к посту 48 контроля для повторной идентификации пробирок 26.
Способ может также содержать этап, на котором робот 70 переносит держатель 22 пробирок непосредственно от зоны 40 пипетирования в зону 20 загрузки/выгрузки для предоставления в распоряжение пользователя обработанных пробных пробирок 26.
Если эритроциты, содержащиеся в пробных пробирках 26, необходимо привести в состояние суспензии в разбавителе, способ может содержать этап, на котором робот 70 переносит емкость 28 с разбавителем, помещенную первоначально пользователем во входной магазин 12, к посту 48 контроля для считывания ее идентификатора. Затем он может перенести ее в зону 40 пипетирования или, в случае необходимости, возвратить ее в магазин 12, чтобы пользователь мог исправить дефект (например, когда емкость 28 испорчена).
После операции пипетирования способ может дополнительно содержать этап, на котором робот 70 перемещает емкость 28 с разбавителем к магазину 12, чтобы опять предоставить ее в распоряжение пользователя; в сборный мусорный бак 52 для ее удаления; или на пост 48 для ее повторной идентификации в случае необходимости.
Способ анализа в соответствии с изобретением может также содержать этап, в ходе которого робот 70 переносит флакон 36 с реактивом, который содержит, например, в зависимости от случая тестовую плазму или тестовую сыворотку.
Например, флакон 36 с реактивом можно переместить на пост 48 контроля для обнаружения присутствия флакона 36 или пробки на флаконе, измерения высоты флакона 36 или считывания его идентификатора. Флакон 36 можно также переместить в зону пипетирования или к входному и выходному магазину 12, чтобы пользователь мог исправить дефект, обнаруженный на флаконе 36 (например, если флакон не открыт). Из зоны пипетирования его можно переместить к сборному мусорному баку 52 для удаления, если он является пустым, или в противном случае на пост 48 контроля для повторной идентификации.
Способ анализа в соответствии с изобретением может также содержать этап, на котором робот 70 переносит гелевую карту 16, первоначально содержащуюся в одной из загруженных кассет 14, во входной магазин 12.
Гелевая карта 16 содержит корпус 16a, в частности из пластика, расположенный в продольном направлении L, в котором выполнены реакционные микропробирки 17, например шесть микропробирок. Эти микропробирки 17 имеют отверстия, выходящие в верхнюю стенку 16b указанной гелевой карты 16, при этом указанные отверстия первоначально закрыты крышкой 19, расположенной в продольном направлении L. В данном примере крышка 19 представляет собой тонкую полоску, закрепленную на верхней стенке 16b гелевой карты 16.
Кроме того, каждая микропробирка 17 гелевой карты 16 содержит гель, необходимый для интерпретации результатов, проявившихся в микропробирках.
В представленном примере каждая микропробирка 17 образована верхней полостью 17a по существу цилиндрической формы, связанной с нижней полостью 17b тоже цилиндрической формы через промежуточную полость в виде усеченного конуса. Верхняя полость 17a имеет диаметр, превышающий диаметр нижней полости 17b, при этом нижняя и верхняя полости являются коаксиальными.
Сначала гелевую карту 16 можно переместить на пост 48 контроля для считывания ее идентификатора или проверки состояния геля.
Ее можно также перенести от поста 48 контроля до магазина 12 или до сборного бака 52, например, когда обнаруживают повреждение карты 16.
Гелевую карту 16 можно переместить в зону 42 пипетирования гелевой карты. Ее можно также переместить из зоны 42 пипетирования на пост 48 контроля для проверки общего уровня израсходованной жидкости, от поста 48 контроля - в инкубатор 18, из инкубатора 18 - на пост контроля 48, от поста 48 контроля - в центрифугу 44 для ее центрифугирования, из центрифуги 44 - на пост 48 контроля для получения изображения карты 16, от поста 48 контроля - во внутренний магазин (не показан) для сбора карт, предназначенных для ручного считывания, из внутреннего магазина (не показан) в выходной магазин 18 гелевых карт для предоставления пользователю возможности ручного считывания, от поста 48 контроля в зону повторно используемых карт для формирования запаса карт, повторно используемых для будущих анализов, не требующих полной гелевой карты, из зоны повторно используемых карт - в зону подготовки блоков подготовки гелевых карт для формирования партий гелевых карт, предназначенных для пипетирования, из зоны повторно используемых карт - в центрифугу с целью балансировки центрифуги перед ее запуском, из зоны повторно используемых карт - к сборному мусорному баку 52 для удаления испорченных карт 16 или для высвобождения места в зоне повторно используемых карт.
Способ анализа в соответствии с изобретением может также содержать этап, на котором робот 70 переносит пустые кассеты 14, первоначально загруженные гелевыми картами 16, из входного магазина 12 в сборный мусорный бак 52 для удаления пустых кассет 14, не используемых в выходном магазине 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОКАЛЫВАНИЯ ГЕРМЕТИЗИРУЮЩЕЙ МЕМБРАНЫ | 2013 |
|
RU2624434C2 |
| УСТРОЙСТВО ДЛЯ ЗАПОЛНЕНИЯ ГЕЛЕВОЙ КАРТЫ, СОДЕРЖАЩЕЕ ИОНИЗАТОР | 2010 |
|
RU2539935C2 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЭКСПРЕССИИ ХИМЕРНОГО ГЕНА Trim5a | 2015 |
|
RU2592675C1 |
| АВТОМАТИЧЕСКИЙ СПОСОБ И АВТОМАТ ДЛЯ ПОДГОТОВКИ И АНАЛИЗА МНОЖЕСТВА КЛЕТОЧНЫХ СУСПЕНЗИЙ | 2011 |
|
RU2556994C2 |
| Способ определения кариотипа плода беременной женщины на основании секвенирования гибридных прочтений, состоящих из коротких фрагментов внеклеточной ДНК | 2019 |
|
RU2717023C1 |
| Хирургическая роботизированная система и способ анализа производительности хирургической роботизированной системы | 2021 |
|
RU2796594C2 |
| МОДИФИКАЦИЯ ПЛАНА ТЕРАПИИ С ИСПОЛЬЗОВАНИЕМ МАГНИТНО-РЕЗОНАНСНЫХ ДАННЫХ, ПОЛУЧЕННЫХ В ПЕРИОД ОХЛАЖДЕНИЯ | 2013 |
|
RU2633912C2 |
| РАЗДЕЛЬНО-ЦИКЛОВОЕ ЦЕНТРИФУГИРОВАНИЕ ТЕСТ-ЭЛЕМЕНТОВ | 2009 |
|
RU2498316C2 |
| Роботизированная медицинская система и манипулятор для 3D-биопечати для полнослойного закрытия кожного дефекта | 2023 |
|
RU2814949C1 |

Изобретение относится к способу медицинского анализа. Заявленный способ медицинского анализа, в котором используют медицинский автоматический анализатор, оснащенный многоосным роботом (70), содержащим шарниры, определяющие по меньшей мере шесть осей вращения (A1, А2, A3, А4, А5, А6), и выполненным с возможностью перемещения и/или ориентирования конечного звена (66) по шести степеням свободы, при этом конечное звено содержит захватный орган (78), выполненный с возможностью удержания емкости (16), содержит, по меньшей мере, последовательные этапы, на которых готовят емкость (16), предварительно заполненную предназначенной для обработки пробой, взятой у человека или животного. Указанную емкость (16) перемещают в направлении, по меньшей мере, одного поста обработки медицинского автоматического анализатора (100) при помощи многоосного робота. Пробу обрабатывают на посту обработки, а емкость перемещают в направлении поста получения изображений и результаты обработки выводят на интерфейс пользователя. 15 з.п. ф-лы, 4 ил.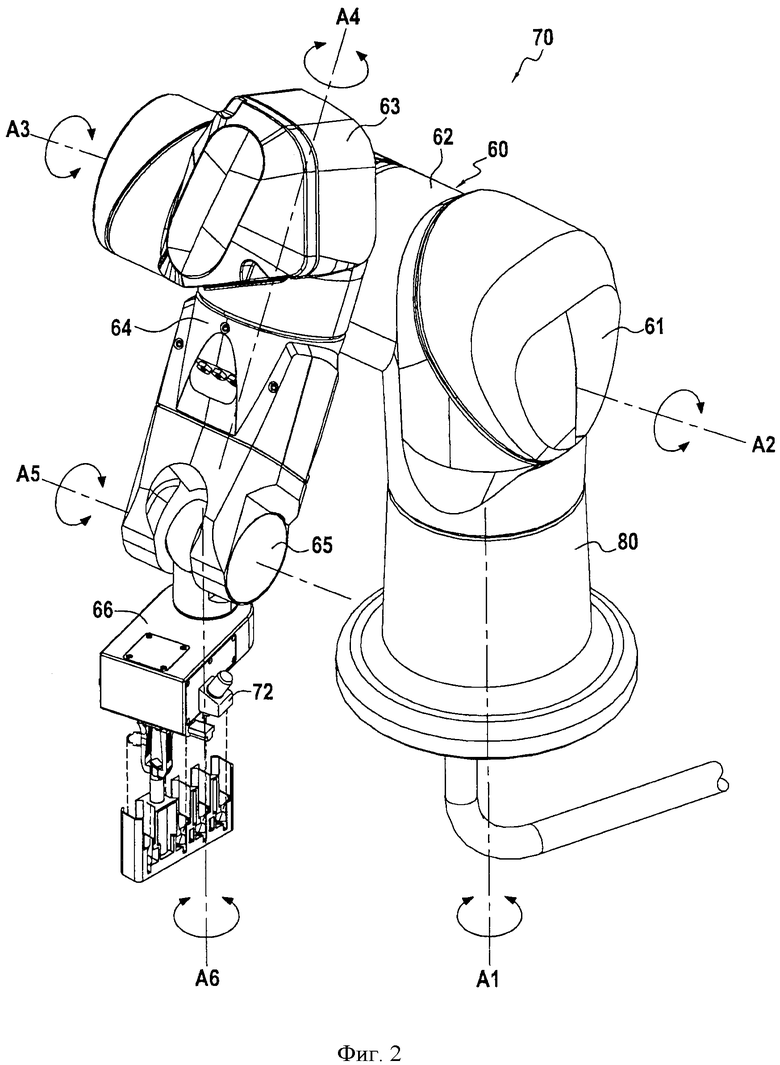
1. Способ медицинского анализа, в котором используют медицинский автоматический анализатор, оснащенный многоосным роботом, содержащим шарниры, определяющие, по меньшей мере, шесть осей вращения, и выполненным с возможностью перемещения и/или ориентирования конечного звена по шести степеням свободы, при этом конечное звено содержит захватный орган, выполненный с возможностью удержания емкости, при этом указанный способ медицинского анализа содержит, по меньшей мере, следующие последовательные этапы:
- берут емкость, предварительно заполненную предназначенной для обработки пробой, взятой у человека или животного,
- перемещают указанную емкость в направлении, по меньшей мере, одного поста обработки медицинского автоматического анализатора при помощи многоосного робота,
- обрабатывают пробу на посту обработки,
- перемещают емкость к посту получения изображений и выводят результаты обработки на интерфейс пользователя,
при этом указанный способ содержит предварительный этап определения параметров, на котором заранее определяют зоны, где может перемещаться многоосный робот, и зоны, куда робот не должен проникать, в частности, чтобы препятствовать его перемещению над некоторыми зонами медицинского автоматического анализатора.
2. Способ по п. 1, в котором этап обработки пробы включает в себя введение в емкость реактива, способного вступать в реакцию с обрабатываемой пробой.
3. Способ по п.п. 1 или 2, содержащий предварительный этап, в ходе которого пробу извлекают из сосуда для хранения и вводят в емкость при помощи многоосного робота.
4. Способ по п.п. 1 или 2, содержащий дополнительный этап анализа, в частности, автоматического анализа результатов обработки.
5. Способ по п.п. 1 или 2, в котором многоосный робот закрепляют на неподвижном цоколе, при этом робот содержит исключительно вращательные шарниры.
6. Способ по п.п. 1 или 2, в котором выполняемый медицинский анализ принадлежит к любым областям, таким как иммуногематология, вирусология, микробиология, бактериология, микология, паразитология, контроль качества для лаборатории диагностики in vitro, обнаружение аутоиммунных заболеваний, мониторинг диабета, обнаружение генетических заболеваний, токсикология и мониторинг физиологического или патологического состояния, в частности, после терапевтического лечения.
7. Способ по п.п. 1 или 2, в котором обрабатываемая проба содержит одну из субстанций, таких как жидкость, клетка, биологическая ткань или орган, взятые у человека или животного.
8. Способ по п.п. 1 или 2, в котором емкость является гелевой картой, содержащей корпус, в котором сформированы несколько смежных реакционных микропробирок, расположенных в один ряд, при этом микропробирки содержат гель и первоначально закрыты крышкой.
9. Способ по п.п. 1 или 2, в котором доставляют емкость на пост получения изображения результатов обработки при помощи многоосного робота.
10. Способ по п.п. 1 или 2, в котором емкость перемещают при помощи многоосного робота на пост контроля, связанный с интерфейсом пользователя.
11. Способ по п. 10, в котором пост получения изображений результатов обработки и пост контроля представляют собой единый пост.
12. Способ по п.п. 1 или 2, в котором:
- перемещают емкость, предварительно заполненную предназначенной для обработки пробой, при помощи многоосного робота, в зону пипетирования указанной емкости для введения в нее реактива,
- вводят реактив в емкость,
- помещают емкость в инкубатор при помощи многоосного робота,
- производят инкубацию емкости,
- при помощи многоосного робота емкость перемещают из инкубатора в центрифугу,
- производят центрифугирование емкости,
- емкость перемещают на пост получения изображений и результаты обработки выводят на экран интерфейса пользователя.
13. Способ по п. 12, в котором перед этапом введения реактива в емкость флакон с реактивом переворачивают и/или встряхивают при помощи многоосного робота, чтобы привести реактив в состояние суспензии.
14. Способ анализа по п.п. 12 или 13, в котором перед этапом центрифугирования емкость перемещают при помощи многоосного робота на пост, где емкость наблюдают визуально для проверки воздушного зазора.
15. Способ по п.п. 1 или 2, в котором емкость перемещают при помощи многоосного робота в сборную емкость, предназначенную для сбора отходов.
16. Способ по п.п. 1 или 2, в котором автомат содержит множество постов обработки, распределенных на 360° вокруг многоосного робота.
| US 2008206855 A1, 28.08.2008 | |||
| US 2010288060 A1, 18.11.2010 | |||
| US 2010015726 A1, 21.01.2010 | |||
| US 2009302795 A1, 10.12.2009. |

