Изобретение относится к области измерительной техники и может быть использовано в средствах регистрации горизонтальных колебаний грунта, генерируемых сейсмическими волнами от естественных и искусственных источников (землетрясений, извержений вулканов, взрывов, техногенных катастроф и др.).
Известно устройство - сейсмограф, содержащий инертную массу и ее плечо до оси качаний, продленное плечо маятника с фрагментом магнитомягкой цилиндрической поверхности вращения на его конце с радиусом, равным продленному плечу маятника, причем, масса магнитомягкой цилиндрической поверхности вращения должна быть значительно меньше инертной массы, и введена цилиндрическая магнитная система Ш-образного сечения в виде сборки центрального постоянного магнита цилиндрической формы, включенного в цилиндрическое ярмо из магнитомягкого материала, ось которой находится на расстоянии радиуса продленного плеча маятника, скрепленная с корпусом и установленная под фрагментом цилиндрической поверхности вращения, преобразователь колебаний маятниковой системы в электрический сигнал и усилитель электрического сигнала, [1].
Недостатком данного сейсмографа является то, что, кроме вертикальной составляющей силы притяжения фрагмента магнитомягкой поверхности вращения к Ш-образной цилиндрической магнитной системе, при отклонениях от положения равновесия действует боковая составляющая, появляющаяся вследствие действия краевого магнитного эффекта, что существенно влияет на элементы подвеса и может повредить их.
Задачей изобретения является создание сейсмографа, позволяющего устранить деформирующее влияние боковой составляющей силы притяжения магнитомягкой поверхности вращения к Ш-образной цилиндрической магнитной системе на элементы подвеса маятника, что обеспечит получение технического результата, состоящего в повышении надежности работы сейсмографа при одновременном сохранении увеличения периода собственных колебаний.
Этот технический результат реализуется в сейсмографе [2]. Однако это техническое решение обладает существенными недостатками: значительные габаритные размеры, не позволяющие использовать устройство в скважинах; высокие требования к качеству изготовления магнитомягкого кольца; невозможность создать абсолютную жесткость крепления конца продленного плеча маятника к магнитомягкому кольцу.
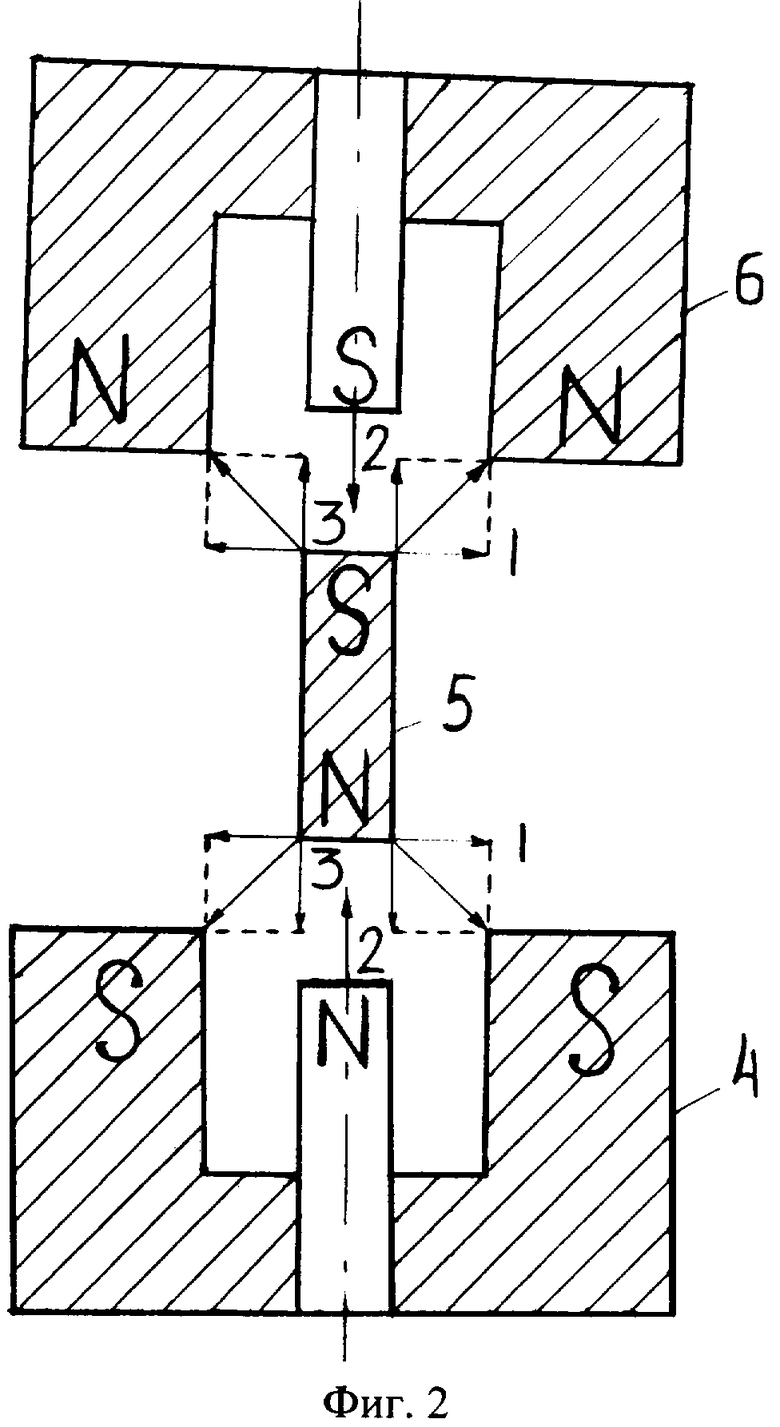
Этот же технический результат в предлагаемом горизонтальном сейсмографе, содержащем инертную массу 1 и ее плечо до оси качаний 2, преобразователь колебаний маятниковой системы в электрический сигнал 3 и усилитель электрического сигнала, достигается тем, что в продолжение плеча 2 через ось качания 4 устанавливается продленное плечо 5 с фрагментом магнитомягкой цилиндрической поверхности вращения 7 на его конце, с радиусом, равным продленному плечу маятника. Под цилиндрической поверхностью вращения 7 и над ней установлены одинаковые скрепленные с корпусом цилиндрические магнитные системы Ш-образного сечения 6, 10, каждый в виде сборки постоянного магнита цилиндрической формы, включенного в цилиндрическое ярмо из магнитомягкого материала, причем ось цилиндрических магнитных систем находится на расстоянии радиуса продленного плеча маятника, а сами магнитные системы повернуты друг к другу постоянными магнитами цилиндрической формы (фиг.1).
Установление положения равновесия достигается при равенстве сил 8, определяемом силой тяжести инертной массы и суммарной силой притяжения 9 цилиндрической поверхности вращения 7 к магнитной системе 6. При этом, после установления положения равновесия, расстояние от краев магнитомягкого фрагмента поверхности вращения 7 до магнитных систем 6 и 10 должно быть одинаковым. При этом необходимо, чтобы масса цилиндрической поверхности вращения 7 была значительно меньше инертной массы 1, которая должна обладать инерционными свойствами.
Сущность изобретения поясняется чертежами, где на фиг.1 изображены: инертная масса 1, ее плечо до оси качаний 2, преобразователь колебаний маятниковой системы в электрический сигнал 3, ось качания 4, продленное плечо 5, магнитные системы 6 и 10, фрагмент цилиндрической поверхности вращения 7. Действие магнитных сил поясняется чертежом, где на фиг.2 изображены Ш-образные сечения магнитных систем 4 и 6, цилиндрической поверхности вращения 5 и действие магнитных сил.
Устройство работает следующим образом. При колебаниях грунта инертная масса 1 выходит из положения равновесия. Возврат массы 1 в исходное положение осуществляется за счет краевого магнитного эффекта, то есть одинаковым и незначительным по величине притяжением концов цилиндрической поверхности вращения 7 к цилиндрическим магнитным системам 6 и 10. При этом примагничивания фрагмента цилиндрической поверхности 7 к цилиндрическим магнитным системам 6 и 10 не происходит. Если, например, сердцевина магнитной системы 4 (фиг.2), выполненная из постоянного магнита, имеет сверху полюс N, то верх ярма магнитной системы, выполненного из магнитомягкого материала, будет иметь, соответственно, полюс S. Сердцевина имеет меньшие размеры, чем ярмо магнитной системы 4, вследствие чего влияние ярма магнитной системы на нижний край цилиндрической поверхности вращения будет большим, чем сердцевины, и нижний край поверхности 5 будет иметь полюс N, как и сердцевина. Аналогично действие магнитных сил и между фрагментом цилиндрической поверхности и магнитной системы 10, с той разницей, что сердцевина магнитной системы 10 имеет снизу полюс S, а низ ярма магнитной системы 10 - полюс N. Таким образом, за счет одинакового притяжения нижнего края поверхности 5 к верхним краям ярма магнитной системы 4, и верхнего края поверхности 5 к нижним краям ярма магнитной системы 6 происходит центрирование поверхности 5 посередине магнитных систем вследствие взаимной компенсации горизонтальных противоположных составляющих вектора силы притяжения фрагмента цилиндрической поверхности вращения к ярму 1, исключая тем самым горизонтальную составляющую силы притяжения магнита к фрагменту поверхности вращения. При этом при настройке и работе не происходит примагничивания поверхности 5 к магнитным системам 4 и 6, так как по мере приближения нижнего края поверхности 5 к магнитной системе 4 увеличивается отталкивающая сила центрального постоянного магнита 2 и при равенстве вертикальных сил притяжения 3 и отталкивания 2 фрагмент цилиндрической поверхности вращения занимает стабильное положение в вертикальном направлении, при этом уравновешивая силу, определяемую силой тяжести инертной массы. При этом не действует боковая составляющая, влияющая на элементы подвеса, за счет дополнительной системы 6, так как силы притяжения краев фрагмента магнитомягкой поверхности вращения к системам 4 и 6 будут равными, что было невозможно в прототипе. Кроме того, при настройке, для установки сейсмографа в положение равновесия обоих плеч, необходимо предусмотреть возможность смещения магнитных систем 4, 6 в горизонтальной плоскости вдоль плеча маятника и в вертикальной плоскости параллельно оси качания.
Сравнительный анализ с прототипом показал, что заявленное изобретение, за счет введения дополнительной магнитной системы, повернутой зеркально к основной магнитной системе, идентичной по конструкции с ней, имеющей противоположную намагниченность, и находящейся после установления положения равновесия над цилиндрической поверхностью вращения на одинаковом расстоянии, что и основная магнитная система, позволяет увеличить период собственных колебаний и повысить надежность элементов подвеса сейсмографа, исключая как радиальную, так и боковую составляющие силы притяжения фрагмента магнитомягкой поверхности вращения к Ш-образной цилиндрической магнитной системе, что было невозможно в прототипе.
Следовательно, техническое решение соответствует критерию "новизна".
Кроме того, так как заявленный технический результат достигается введением всей совокупности существенных признаков, что в известной патентной и научной литературе не обнаружено на дату подачи заявки, изобретение соответствует критерию "изобретательский уровень".
Источники информации:
1. Патент на изобретение № 2258245 от 10.08.2005, РФ, бюл. № 22. Сейсмограф / М.Ю.Дорофеев, Е.А.Лапицкий, В.Ю.Овчаренко, А.С.Шушлебин.
2. Патент на изобретение № 2300785 от 10.06.2007, РФ, бюл. № 16. Сейсмограф / А.С.Шушлебин, Е.А.Лапицкий, М.В.Каргапольцев.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОГРАФ | 2005 |
|
RU2300785C1 |
| СЕЙСМОГРАФ | 2004 |
|
RU2258245C1 |
| СЕЙСМОГРАФ | 2001 |
|
RU2208816C1 |
| СЕЙСМОГРАФ | 2003 |
|
RU2236025C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| СЕЙСМОГРАФ С ЛАЗЕРНОЙ РЕГИСТРАЦИЕЙ | 2021 |
|
RU2786338C1 |
| Автомат управления стабилизацией положения транспортного средства | 1986 |
|
SU1399186A1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Электромагнитный привод маятникового осциллятора | 1978 |
|
SU732794A1 |
| Устройство для управления чувствительностью сейсмографов | 1933 |
|
SU37868A1 |
Изобретение относится к области измерительной техники и может быть использовано в средствах регистрации горизонтальных колебаний грунта, генерируемых сейсмическими волнами от источников естественного и искусственного происхождения. Технический результат направлен на повышение надежности работы сейсмографа при одновременном сохранении увеличения периода собственных колебаний. Сейсмограф содержит преобразователь колебаний маятниковой системы в электрический сигнал, усилитель электрического сигнала, инертную массу и ее плечо до оси качаний, продленное плечо маятника с фрагментом магнитомягкой цилиндрической поверхности вращения на его конце с радиусом, равным продленному плечу маятника. Причем, масса магнитомягкой цилиндрической поверхности вращения должна быть значительно меньше инертной массы, и введены цилиндрические магнитные системы Ш-образного сечения в виде сборки центрального постоянного магнита цилиндрической формы, включенного в цилиндрическое ярмо из магнитомягкого материала. Причем,верхняя магнитная система повернута зеркально к нижней магнитной системе, идентичной по конструкции с ней, имеющей противоположную намагниченность, и находится после установления положения равновесия над цилиндрической поверхностью вращения на одинаковом расстоянии, что и нижняя магнитная система, находящаяся под цилиндрической поверхностью вращения, и ось магнитных систем, скрепленных с корпусом, находится на расстоянии радиуса продленного плеча маятника. 2 ил.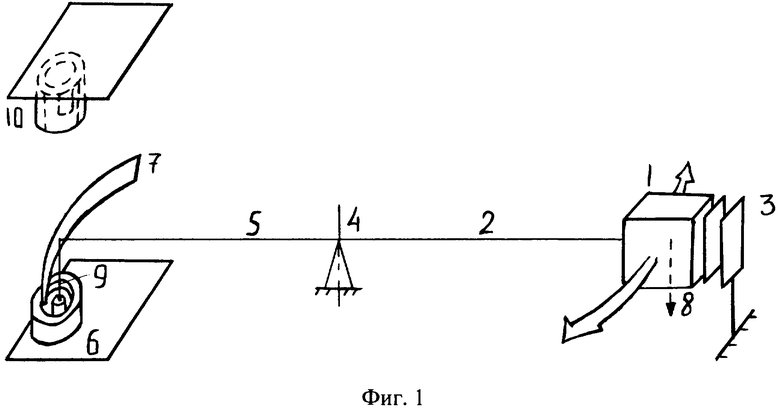
Сейсмограф, содержащий инертную массу и ее плечо до оси качаний, преобразователь колебаний маятниковой системы в электрический сигнал и усилитель электрического сигнала, отличающийся тем, что в него введено продленное плечо маятника с фрагментом магнитомягкой цилиндрической поверхности вращения на его конце с радиусом, равным продленному плечу маятника, причем масса магнитомягкой цилиндрической поверхности вращения должна быть значительно меньше инертной массы, и введены цилиндрические магнитные системы Ш-образного сечения в виде сборки центрального постоянного магнита цилиндрической формы, включенного в цилиндрическое ярмо из магнитомягкого материала, причем верхняя магнитная система повернута зеркально к нижней магнитной системе, идентичной по конструкции с ней, имеющей противоположную намагниченность, и находится после установления положения равновесия над цилиндрической поверхностью вращения на одинаковом расстоянии, что и нижняя магнитная система, находящаяся под цилиндрической поверхностью вращения, и ось магнитных систем, скрепленных с корпусом, находится на расстоянии продленного плеча маятника.
| СЕЙСМОГРАФ | 2005 |
|
RU2300785C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| СЕЙСМОГРАФ | 2004 |
|
RU2258245C1 |
| СЕЙСМОГРАФ | 2001 |
|
RU2208816C1 |
| DE 1994135 U, 19.09.1968. | |||

