Изобретения относятся к системам управления беспилотными объектами и преимущественно могут быть использованы в системах наведения.
Известен способ управления [1], включающий формирование заданных ускорений и измерение ускорений в плоскости, перпендикулярной известному вектору (лучу), и использование разности этих ускорений для управления объектом.
Недостатком известного способа является техническая сложность его осуществления. Для реализации способа необходим контур стабилизации по перегрузке на оси лучевой системы координат, в то время как реализация перегрузки объекта осуществляется путем отклонения рулей управления в связанных осях объекта. Техническая сложность создания такого контура стабилизации очевидна и подтверждается тем, что известный способ не реализован по настоящее время.
Известен способ управления [2], включающий формирование заданных ускорений в плоскости, перпендикулярной известному вектору (линии дальности), и использование этих ускорений в качестве заданных ускорений на оси OY1 OZ1 связанной системы координат объекта.
Недостатком известного способа, принятого за прототип, является наличие ошибок реализации закона наведения при угловых рассогласованиях между корпусом объекта и известным вектором [3].
Известно устройство управления [4], содержащее блок формирования заданных ускорений и исполнительное устройство, причем выходы блока формирования соединены с соответствующими входами исполнительного устройства.
Недостатком известного устройства является наличие ошибок реализации закона наведения при угловых рассогласованиях между корпусом объекта и известным вектором [3].
Задачей, на решение которой направлены изобретения, является повышение вероятности поражения цели за счет точной реализации объектом закона наведения.
Поставленная задача решается за счет того, что в предлагаемом способе управления объектом по ускорению, включающем формирование заданных ускорений в плоскости, перпендикулярной известному вектору, согласно изобретению одновременно дополнительно измеряют ускорение по продольной оси объекта, находят вектор заданных ускорений и определяют орт известного вектора на оси связанной системы координат, а затем, используя вектор заданных ускорений, измеренное ускорение и орт известного вектора, находят значения управляющих ускорений по осям управления OY1 и OZ1 объекта.
К существенным отличиям заявленного способа от известных технических решений относится то, что заявленный способ формирует управляющие ускорения на оси связанной системы координат и позволяет найти такие управляющие ускорения на оси OY1 и OZ1 объекта, что проекция полного вектора ускорений объекта на плоскость, перпендикулярную известному вектору, равна заданным ускорениям в этой плоскости. Таким образом, заявленное решение позволяет точно реализовать закон наведения объекта независимо от величины продольного ускорения и углового рассогласования между известным вектором и продольной осью объекта.
В устройство управления объектом по ускорению, включающее блок формирования заданных ускорений и исполнительное устройство, согласно изобретению дополнительно введены акселерометр и преобразующее устройство, n входов которого соединены с соответствующими выходами блока формирования заданных ускорений, выход акселерометра соединен с другим входом преобразующего устройства, выходы которого соединены с входами исполнительного устройства.
К существенным отличиям заявленного устройства от известного относится то, что оно дополнительно содержит акселерометр по продольной оси объекта и преобразующее устройство, которое формирует управляющие ускорения на вход исполнительного устройства с учетом углового рассогласования между системами координат и измеренного акселерометром продольного ускорения объекта, что позволяет точно реализовать заданные ускорения, сформированные в соответствии с законом наведения в плоскости, перпендикулярной известному вектору.
При наведении по подвижным целям известные технические решения накладывают ограничения на ракурсы пуска и углы подхода к цели, снижая вероятность решения задачи наведения. Предложенное техническое решение снимает ограничения по углам подхода и ракурсам пусков, тем самым расширяет диапазон применения объектов, снабженных системой управления, построенной с использованием предложенных решений, за счет чего повышается вероятность успешного решения задачи наведения. Поэтому предлагаемое техническое решение имеет существенное практическое значение.
На фиг.1 приведена блок-схема устройства.
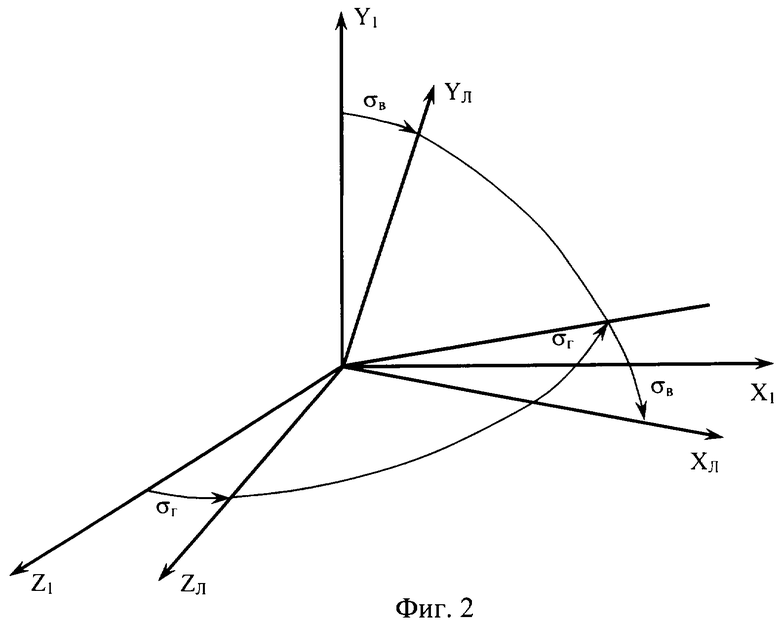
На фиг.2 приведены системы координат: связанная с корпусом объекта система координат «1» и связанная с известной линией система координат «л».
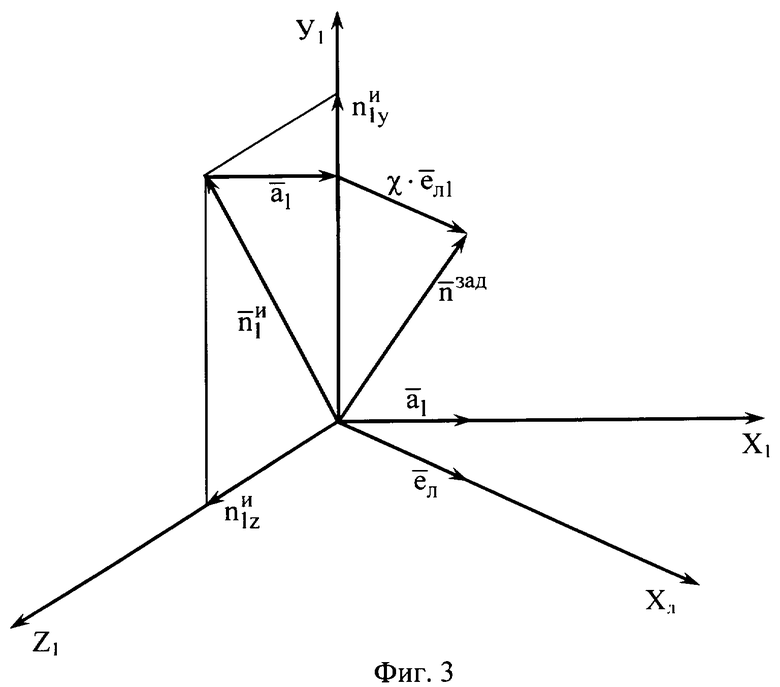
На фиг.3 графически иллюстрировано основное уравнение предлагаемых решений.
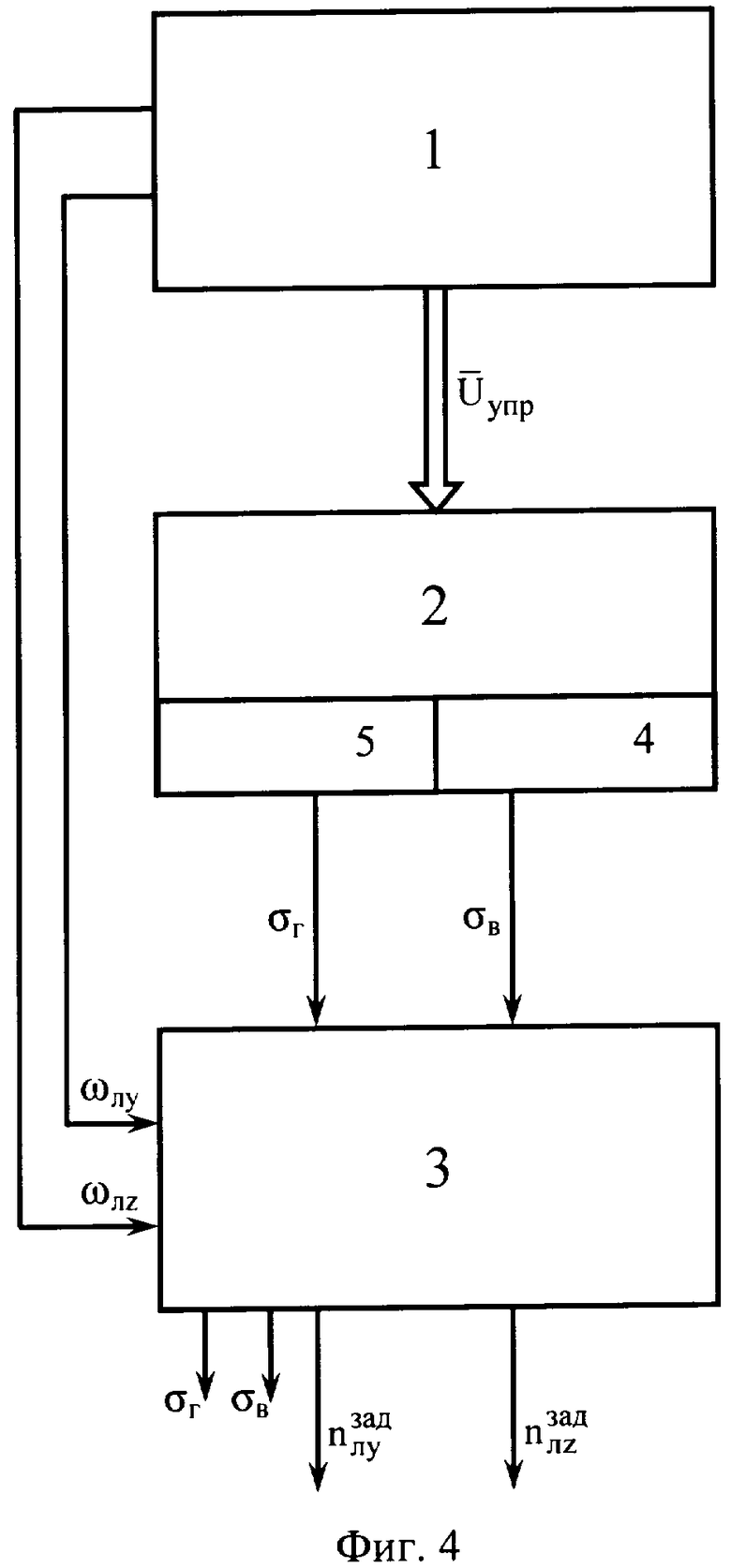
На фиг.4 приведена блок-схема устройства формирования заданных ускорений, обозначенная позицией 1 на фиг.1.
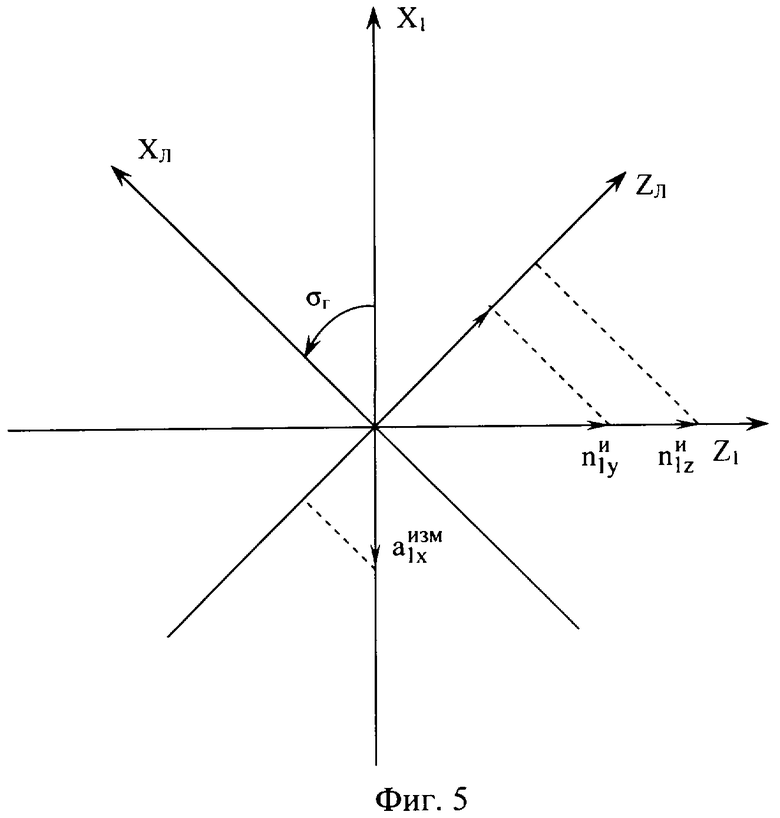
Фиг.5 иллюстрирует численный пример.
В настоящем описании все ускорения полагаются активными, в том числе ускорение, измеренное акселерометром по продольной оси объекта. Данное допущение ничего не изменяет по существу, но упрощает описание технической сущности.
На фиг.1 приведена блок-схема предложенного устройства, которое может быть использовано для реализации способа управления объектом по ускорению. Устройство содержит блок 1 формирования заданных ускорений, преобразующее устройство 2, акселерометр 3 по продольной оси и исполнительное устройство 4. Выходы 1...n блока 1 формирования заданных ускорений соединены с соответствующими входами преобразующего устройства 2, выходы nи 1у и nи 1z которого соединены с соответствующими входами исполнительного устройства 4, а другой вход соединен с выходом акселерометра 3 по продольной оси.
В качестве блока 1 формирования заданных ускорений может быть использовано устройство на фиг.4 [5], включающее координатор 1, гиростабилизатор 2 с двумя датчиками 4 и 5 угла и вычислительное устройство 3. N выходов координатора 1 соединены с соответствующими входами гиростабилизатора 2 для управления его ориентацией, два других выхода координатора 1 соединены с первым и вторым входами вычислительного устройства 3, третий и четвертый входы которого соединены с выходами датчиков 4 и 5 углов. Причем выходы вычислительного устройства 3 являются выходами блока 1 формирования заданных ускорений. В качестве преобразующего устройства 2 может быть использовано вычислительное устройство. В качестве исполнительного устройства 4 может быть использована система стабилизации.
Способ реализуют следующим образом. В соответствии с законом наведения формируют заданные ускорения на плоскость, перпендикулярную известному вектору, одновременно определяют параметры взаимной ориентации, например в виде матрицы, систем координат, связанных с корпусом объекта и известным вектором, одновременно измеряют ускорение по продольной оси объекта. Для определения параметров взаимной ориентации измеряют, например, углы ориентации известного вектора относительно корпуса объекта. Измеренное ускорение, параметры взаимной ориентации и заданные ускорения преобразуют по предложенным в настоящем описании правилам в управляющие ускорения, которые подают на входы исполнительного устройства. Причем управляющие ускорения имеют такие значения, что проекция полного ускорения объекта на плоскость, перпендикулярную известному вектору, равна заданным ускорениям в этой плоскости, сформированным в соответствии с законом управления.
Устройство работает следующим образом.
Блок 1 формирования заданных ускорений измеряет углы взаимной ориентации системы координат, связанной с корпусом объекта, и известного вектора и одновременно формирует заданные ускорения в плоскости, перпендикулярной известному вектору. Акселерометр 3 одновременно измеряет ускорение по продольной оси объекта. Измеренное ускорение, углы взаимной ориентации и заданные ускорения поступают на соответствующие входы преобразующего устройства 2, которое формирует сигналы управления в виде управляющих ускорений на входы исполнительного устройства 4 так, что проекция полного ускорения объекта на плоскость, перпендикулярную известному вектору, равна заданным ускорениям, сформированным блоком 1 в соответствии с законом управления.
Пояснения сущности изобретения и обоснование его осуществимости. Известно, что распространены системы наведения, в которых в соответствии с законом управления заданные перегрузки формируются в плоскости, перпендикулярной известному вектору. Это, например, системы, основанные на методе пропорционального наведения, в которых заданные перегрузки пропорциональны угловой скорости вращения вектора дальности (лучу координатора) и принадлежат плоскости, перпендикулярной вектору дальности. Известно также, что реализация заданных ускорений в контурах стабилизации осуществляется путем сравнения заданных и измеренных ускорений по поперечным осям управления OY1 и OZ1 связанной системы координат. При этом большинство объектов не обладает устройствами управления ускорением по продольной оси.
В известных системах наведения заданное ускорение на оси связанной системы координат:
1) равно заданному ускорению, найденному в соответствии с законом наведения в плоскости, перпендикулярной известному вектору;
2) равно заданному ускорению, найденному в соответствии с законом наведения и деленному на квадрат косинуса угла между системами координат.
В плоском случае для варианта 1) проекция реализованного ускорения на плоскость, перпендикулярную известному вектору, отличается от заданного ускорения на величину, зависящую от угла между системами координат. Для варианта 2) проекция реализованного ускорения совпадает с заданным ускорением.
Однако в обоих случаях фактически реализованное объектом ускорение в плоскости, перпендикулярной известному вектору, отличается от заданного ускорения по крайней мере на величину проекции на эту плоскость ускорения по продольной оси объекта.
Известно [3], что отличие реализованного ускорения от заданного воспринимается системой управления как ложный маневр цели, снижает степень устойчивости управления по закону наведения, накладывает ограничения на условия применения объектов. Поэтому реализация ускорения, проекция которой на плоскость, перпендикулярную известному вектору, равна заданному ускорению в этой плоскости, решает поставленную задачу.
Формальная формулировка задачи.
Для точной реализации объектом закона управления ускорением, перпендикулярным известному вектору, необходимо в плоскости управления объектом сформировать такое ускорение по осям OY1 и OZ1, чтобы проекция полного вектора ускорения объекта на плоскость, перпендикулярную известному вектору, была равна заданному ускорению в этой плоскости.
В соответствии с рисунком на фиг.3 данное утверждение может быть записано формулой

 - заданное ускорение;
- заданное ускорение;
 - управляющее ускорение на вход исполнительного устройства;
- управляющее ускорение на вход исполнительного устройства;
 - измеренное ускорение;
- измеренное ускорение;
 - орт в направлении известного вектора;
- орт в направлении известного вектора;
χ - неизвестный масштабный коэффициент.
Неизвестное управляющее ускорение получим по формуле

В координатной записи из (2) получим систему из трех уравнений с тремя неизвестными
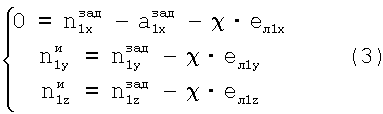
Из первого уравнения системы (3)
Поставив χ во второе и третье уравнения, найдем искомое ускорение на вход исполнительного устройства
Из (4) следует, что система не имеет решения, если угол между осью Ox1 связанной системы координат и направлением известного вектора составляет 90°.
Задача формирования заданных ускорений полностью решена, если известны, входящие в формулу (2) векторы  и
и  .
.
В соответствии с фиг.4 с выхода блока формирования заданных ускорений поступают углы пеленга σв, σг и заданные ускорения nзад лу и nзад лz
в плоскости, перпендикулярной известному вектору.
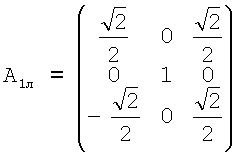
По углам пеленга можно построить матрицу перехода между лучевой и связанной системами координат, например

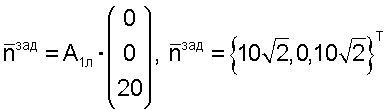
Заданное ускорение на оси связанной системы координат определяют по формуле
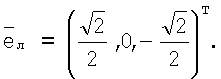
Орт известной линии в связанной системе координат определяется формулой
Таким образом, найдены все векторы в правой части формулы (2), следовательно, полностью решена задача формирования управляющего ускорения объектом в соответствии с законом наведения.
Численный пример. Пусть угол между продольной осью и известной линией равен 45 град.
При этом σг=45° и σв=0. Заданное ускорение равно nзад лу=0, nзад лz=20 м/с.
Измеренное ускорение по продольной оси аизм 1x=-10 м/с2.
Согласно (6)÷(8)
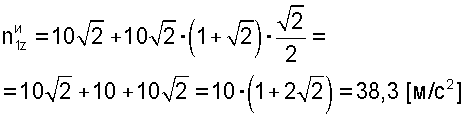
Подставив в (4) и (5) получим


Без учета продольного ускорения в известном способе на вход исполнительного устройства формируют

или (с полной компенсацией углового рассогласования)
На фиг.5 приведена графическая иллюстрация численного примера. Таким образом, полностью доказана осуществимость предложенных технических решений. Численный пример наглядно показывает существенное отличие предложенного решения от известных технических решений.
Значительный угол между продольной осью объекта и линией дальности возникает при стрельбе по подвижным целям, когда скорости объекта и цели соизмеримы, а пуски осуществляются под боковыми ракурсами.
Литература.
1. «Проектирование систем наведения» под ред. Е.А.Федосова. М.: Машиностроение, 1975, стр.27, 28.
2. «Проектирование систем наведения» под ред. Е.А.Федосова. М.: Машиностроение, 1975, стр.27, 28.
3. «Проектирование систем наведения» под ред. Е.А.Федосова. М.: Машиностроение, 1975, стр.26-29.
4. «Системы наведения», Е.И.Кринецкий. М.: Машиностроение, 1970, стр.117, 118.
5. «Системы наведения», Е.И.Кринецкий. М.: Машиностроение, 1970, стр.127.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2004 |
|
RU2282869C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282868C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282866C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
Изобретения относятся к области приборостроения и могут быть использованы в системах наведения летательных аппаратов (ЛА). Технический результат - повышение точности. Для достижения данного результата дополнительно введены: операции измерения ускорения по продольной оси объекта, определения вектора заданных ускорений и орта известного вектора на оси связанной системы координат объекта и определения значений управляющих ускорений по осям управления ЛА. Акселерометр и преобразующее устройство, которое одним входом соединено с выходами блока формирования заданных ускорений, другим входом с выходом акселерометра, а выходами - с входами исполнительного устройства. 2 н.п. ф-лы, 5 ил.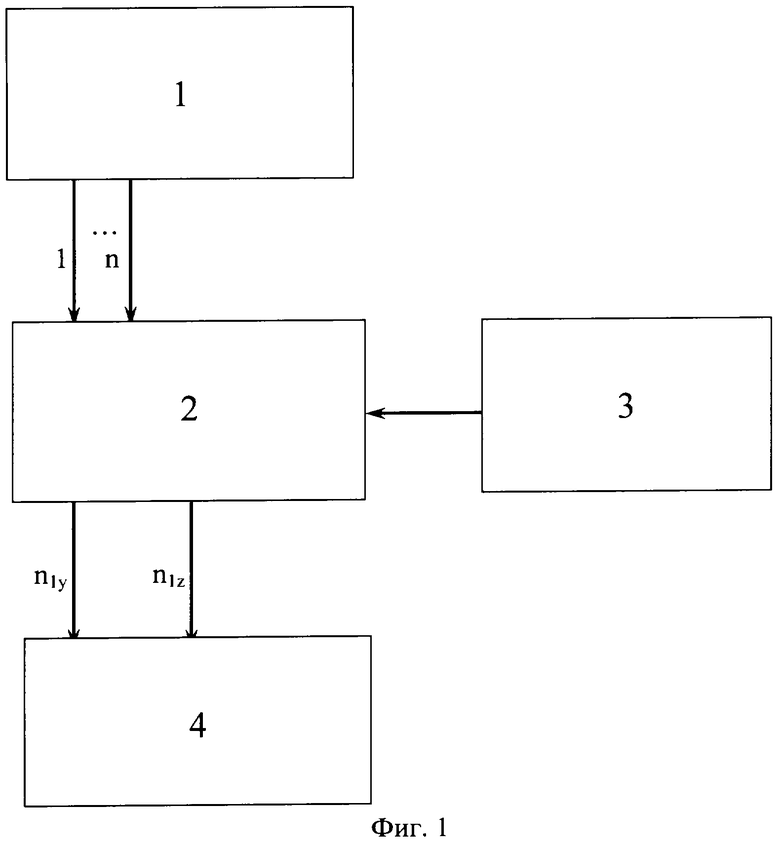
| Кринецкий Е.И | |||
| Системы наведения | |||
| - М.: Машиностроение, 1970, стр.117, 118,127 | |||
| Проектирование систем наведения/ Под ред | |||
| Е.А.Федосова | |||
| - М.: Машиностроение, 1975, стр.26-29 | |||
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| Лебедев А.А., Карабанов В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.218-223 | |||
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |

