Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например с носителями на земле, в которых применяются лучевые системы теленаведения.
В системах теленаведения по лучу формируют пространственную структуру электромагнитного поля, создаваемую передающим устройством с пункта управления, при этом параметры поля управления функционально связаны с координатами соответствующих точек, например в системе декартовых координат "Z0Y", где "Z" - величина координаты по курсу, "Y" - величина координаты по тангажу, "0" - начало координат, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения). Формирование поля управления осуществляют, например, сканированием диаграммы направленности в двух взаимно перпендикулярных направлениях по "Z" и "Y", соответственно, при этом пропорционально углу сканирования изменяют величину команд. Таким образом, в плоскости "Z0Y" поле имеет по краям единичные (с разными знаками, соответственно) значения команд, а в центре - нулевое. Бортовая аппаратура, расположенная на ракете, измеряет параметры электромагнитного поля, изменяемые по закону время-импульсной (ВИМ), или кодово-импульсной (КИМ), или широтно-импульсной модуляции (ШИМ) и т.д., а затем определяет свое положение относительно "0", при этом на ракете вырабатывают команды управления таким образом, чтобы заставить ее занять определенное положение относительно заданного электромагнитного поля.
Известны способ управления ракетой и система наведения ракеты для его реализации [1]. Способ управления ракетой заключается в том, что в системе теленаведения по лучу преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, из которых формируют команды управления ракетой по курсу и тангажу.
Система наведения ракеты [1] содержит аппаратуру пункта управления, связанную с расположенной на ракете бортовой аппаратурой управления, выход которой подключен к автопилоту. В бортовую аппаратуру управления ракетой входят канал ошибки, опорный канал, блок поправки на угол крена и преобразователь координат, которые в целом выполняют функцию выделения координат по курсу UKz и тангажу UKy. Кроме того, в нее входят блок поправки на скорость и устройство формирования команд, которые можно отнести функционально к входной части автопилота, поскольку они выполняют функцию формирования командного сигнала [1].
В процессе полета ракеты к цели помимо команд управления на ракету воздействует возмущение, обусловленное собственной массой ракеты, при этом в полете изменяются как масса ракеты (из-за выгорания топлива), так и ее скорость. Это приводит к провисанию ракеты относительно центра поля управления ("0"). Увеличение крутизны пеленгационной характеристики (зависимости величины напряжения UKy от величины отклонения ракеты от "0" по тангажу) для компенсации этого возмущения не представляется возможным, т.к. при этом ухудшаются динамические характеристики контура наведения, что может привести к выходу (выбросу) ракеты из луча (поля управления).
Таким образом, недостатком известного способа управления ракетой и системы наведения ракеты, его реализующей, является низкая точность наведения ракеты на цель за счет ошибки наведения в канале тангажа, обусловленной провисанием ракеты под действием силы тяжести.
Задачей настоящего изобретения (способа и устройства) является повышение точности наведения за счет коррекции на борту ракеты величины команды управления в канале тангажа.
Поставленная задача решается в способе управления ракетой за счет того, что преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, формируют команды управления ракетой по курсу и тангажу, причем команду управления по курсу формируют из электрического сигнала координаты по курсу, при котором на ракете программно вырабатывают первую дополнительную команду, пропорциональную величине провисания ракеты, вырабатывают вторую дополнительную команду, интегрируя электрический сигнал координаты по тангажу, а затем суммируют первую и вторую дополнительные команды и электрический сигнал координаты по тангажу и из суммарной величины формируют команду управления ракетой по тангажу.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выход по курсу которого соединен с первым входом автопилота, при этом вход приемника связан с аппаратурой пункта управления, введены сумматор, блок компенсации, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный вход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоком компенсации, при этом выход сумматора соединен со вторым входом автопилота.
Заявленный способ реализуется следующим образом. После старта ракеты и встреливания ее в луч, на борту ракеты преобразуют электромагнитное излучение поля управления, в котором находится ракета, в электрические сигналы координат ракеты по курсу UKz и по тангажу UKy. Поскольку ракета под действием силы тяжести по тангажу провисает вниз относительно центра поля управления, т.е. "0", то на ракете вырабатывают дополнительные команды. Первая дополнительная команда, например, изменяется дискретно во времени, при этом она задается, например, с момента старта ракеты и предназначена для компенсации постоянной составляющей провисания ракеты, т.е. компенсации большей части ошибки наведения. Эту команду формируют заранее программно на борту ракеты, например, по анализу статистических данных траекторных измерений.
Вторую дополнительную команду получают путем интегрирования электрического сигнала координаты по тангажу и выставления соответствующего коэффициента передачи по отношению к величине координаты (при их суммировании). При интегрировании выделяют ошибку, т.е. величину отклонения ракеты от "0" в вертикальной плоскости. Вторую дополнительную команду формируют, например, после окончания переходного процесса, т.е. после встреливания ракеты в луч. Эта команда учитывает меньшую часть ошибки, обусловленную медленным изменением ошибки вокруг среднего значения.
Таким образом, в канале тангажа суммируют первую дополнительную команду, вторую дополнительную команду и величину координаты, при этом первая и вторая дополнительные команды компенсируют как внутренние возмущения, так и внешние, возникающие в полете и обусловленные изменением веса и скорости полета ракеты, причем данная коррекция не ухудшает динамические характеристики контура наведения.
Из курсовой координаты и суммарной команды из канала тангажа формируют (в автопилоте) команды управления ракетой, соответственно, по курсу и тангажу.
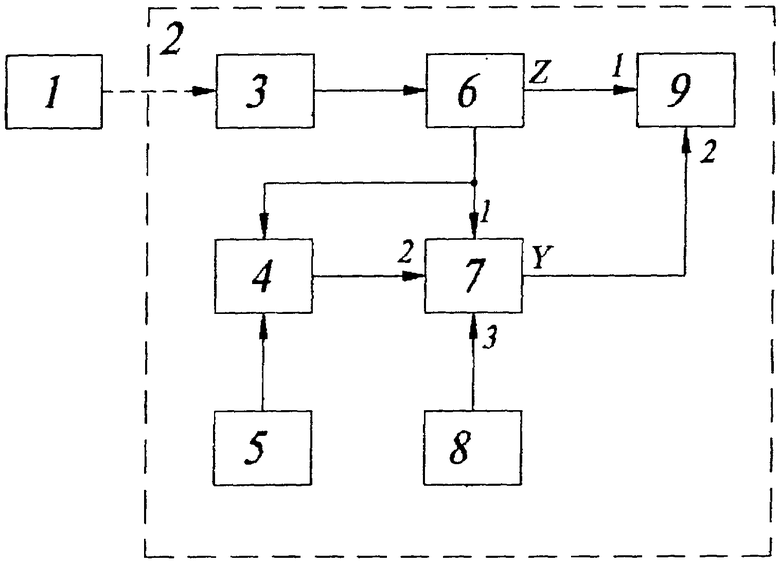
Предлагаемое изобретение поясняется структурной электрической схемой, приведенной на чертеже, где представлены: 1 - аппаратура пункта управления, 2 - ракета, 3 - приемник, 4 - интегратор, 5 - блок включения интегратора, 6 - блок выделения координат, 7 - сумматор, 8 - блок компенсации, 9 - автопилот.
Приемник 3 (после ввода ракеты в луч) электромагнитным излучением связан с аппаратурой пункта управления 1. Выход приемника 3 подключен ко входу блока выделения координат 6, выход по курсу которого соединен с первым входом автопилота 9. Блок включения интегратора 5 связан с управляющим входом интегратора 4, сигнальный вход которого соединен с выходом блока выделения координат 6 по тангажу, подключенного к первому входу сумматора 7. Второй вход сумматора 7 соединен с выходом интегратора 4, а третий вход - с блоком компенсации 8, при этом выход сумматора соединен со вторым входом автопилота 9.
Аппаратура пункта управления 1 может быть выполнена как в известной системе наведения при сканировании диаграммы направленности, например, поочередно в двух взаимно перпендикулярных направлениях (по курсу и тангажу). Приемник 3 и блок выделения координат 6 могут быть выполнены по схеме приемного тракта, например, с времяимпульсной модуляцией (ВИМ) при оптической связи или с дополнительной амплитудной модуляцией (ВИМ-АМ) при радиосвязи [1]. Соответственно с данным видом модуляции, должна быть выполнена и аппаратура пункта управления 1.
Автопилот 9 можно выполнить как автопилот для ракеты, стабилизированной по углу крена [1], либо как автопилот для ракеты, вращающейся по углу крена [2]. Интегратор 4 можно выполнить, например, на операционном усилителе с электронным ключом "Кл" [3]. Блок включения интегратора 5 можно выполнить, например, как реле времени [4], на вход которого подается, например, импульс запуска двигательной установки, а выход реле подключен к управляющему входу электронного ключа "Кл". Блок компенсации 8 можно выполнить в виде резисторных делителей напряжения, входы которых подключены к бортовому источнику питания, а выходы через электронный коммутатор, например мультиплексор на микросхеме 564КП2, - к третьему входу сумматора 7. При этом управляющий вход коммутатора подключен к выходу преобразователя время-код, выполненного, например, в виде счетчика импульсов, счетный вход которого подключен к генератору импульсов. На вход обнуления (установка в исходное состояние) счетчика импульсов подают, например, импульс, запускающий двигательную установку. Блоки 4, 5 и 8 можно выполнить целиком в цифровом виде.
Заявленная система наведения ракеты работает следующим образом. Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например по закону ВИМ, при этом при изменении плоскости сканирования "Z" на "Y" меняют рабочие сигналы РС1 на РС2 [1].
С момента старта ракеты 2 и до момента попадания ее в поле управления на выходах блока выделения координат 6 по обоим каналам формируются нулевые значения координат (величины напряжений равны нулю), при этом по каналу курса "Z" сигнал поступает на первый вход автопилота 9. На второй вход автопилота 9 по каналу тангажа "Y" поступает команда в виде напряжения (отличного от нуля) только с блока компенсации 8 через сумматор 7. Эта команда компенсирует вес ракеты.
В момент попадания ракеты в поле управления приемник 3 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 6. Этот блок выделяет по курсу "Z" и тангажу "Y" координаты (их электрические сигналы), при этом координата по тангажу "Y" поступает на первый вход сумматора 7 и сигнальный вход интегратора 4. В сумматоре 7 координата со своим знаком суммируется с командой с выхода блока компенсации 8. Этот суммарный сигнал поступает на второй вход автопилота 9 и облегчает встреливание ракеты в луч в канале тангажа, например, при траектории полета ракеты, параллельной поверхности земли.
По окончании переходного процесса встреливания ракеты в луч (в поле управления), блок включения интегратора 5, например, включает интегратор 4, который интегрирует величину координаты "Y" и выделяет ошибку, т.е. величину отклонения ракеты от точки прицеливания "0" и подает ее на второй вход сумматора 7. Таким образом, на выходе сумматора 7 до конца полета формируют по тангажу команду, которая обеспечивает управление ракетой 2 от пространственной структуры электромагнитного поля с выхода аппаратуры пункта управления 1, при этом на борту ракеты дополнительно формируют добавочные команды, компенсирующие ошибку наведения из-за изменения веса ракеты и скорости полета, т.е. в заявленном устройстве корректируют величину команды управления ракетой в канале тангажа при сохранении крутизны пеленгационной характеристики, что обеспечивает повышение точности наведения при сохранении динамических характеристик контура управления.
Следовательно, в способе управления ракетой за счет того, что на ракете программно вырабатывают первую дополнительную команду, пропорциональную величине провисания ракеты, вырабатывают вторую дополнительную команду, интегрируя электрический сигнал координаты по тангажу, а затем суммируют первую и вторую дополнительные команды и электрический сигнал координаты по тангажу и из суммарной величины формируют команду управления ракетой по тангажу, повышена точность наведения за счет коррекции на борту ракеты команды управления по тангажу.
Введение в систему наведения ракеты сумматора, блока компенсации, интегратора и блока включения интегратора, связанного с управляющим входом интегратора, при котором сигнальный вход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоком компенсации, при этом выход сумматора соединен со вторым входом автопилота повысило точность наведения ракеты в канале тангажа за счет коррекции на борту ракеты команд управления, учитывающих влияние как внешних возмущений, так и внутренних, возникающих в полете ракеты из-за относительного изменения веса ракеты и скорости полета.
Источники информации
1. Основы радиоуправления./Под ред. Вейцеля В.А. и Типугина В.Н. - М.: "Сов. радио", 1973 г., стр.276, рис.5.3, стр.49, рис.1.27, стр.247, рис.4.28, стр.246.
2. В.А.Павлов, С.А.Понырко, Ю.М.Хованский. Стабилизация летательных аппаратов и автопилоты. - М.: "Высшая школа", 1964 г., стр.209, рис.6.11.
3. Л.Фолкенберри. Применение операционных усилителей и линейных ИС. - М.: "Мир", 1985 г., стр. 127, рис.6.2, стр.132, рис.6.6
4. У.Титце, К.Шенк. Полупроводниковая схемотехника. - М.: "Мир", 1982 г., стр.313, рис.18.36.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2295691C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2004 |
|
RU2280233C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2266514C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, например, с носителями на земле, в которых применяются лучевые системы теленаведения. Задачей изобретения является повышение точности наведения за счет коррекции на борту ракеты величины команды управления в канале тангажа. Предложен способ управления ракетой, согласно которому преобразуют электромагнитное излучение с пункта управления в электрические сигналы координат ракеты по курсу и тангажу, формируют команды управления ракетой по курсу и тангажу, причем команду управления по курсу формируют из электрического сигнала координаты по курсу, при котором на ракете программно вырабатывают первую дополнительную команду, пропорциональную величине провисания ракеты, вырабатывают вторую дополнительную команду, интегрируя электрический сигнал координаты по тангажу, а затем суммируют первую и вторую дополнительные команды и электрический сигнал координаты по тангажу и из суммарной величины формируют команду управления ракетой по тангажу. Описана система наведения ракеты, основанная на этом способе, в которую введены сумматор, блок компенсации, интегратор и блок включения интегратора, связанный с управляющим входом интегратора, сигнальный выход интегратора соединен с выходом блока выделения координат по тангажу, подключенного к первому входу сумматора, второй вход которого соединен с выходом интегратора, а третий - с блоками компенсации, при этом выход сумматора соединен со вторым входом автопилота. 1 з.п. ф-лы, 1 ил.
| Основы радиоуправления | |||
| / Под ред | |||
| В.А | |||
| ВЕЙЦЕЛЯ, В.Н | |||
| ТИПУГИНА | |||
| - М.: Советское радио, 1973, с.276 и 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

