Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации движущихся объектов.
Известна [1] гироскопическая навигационная система, содержащая блок управления и выработки выходных параметров, гироплатформу, на которой установлены трехстепенной гироскоп с датчиками момента и датчиками угла, ось кинетического момента гироскопа перпендикулярна плоскости гироплатформы, входы датчиков момента гироскопа связаны с первым и вторым выходами блока управления и выработки выходных параметров, первый и второй акселерометры, оси чувствительности которых ортогональны между собой и параллельны плоскости гироплатформы, выходы которых соединены с первым и вторым входами блока управления и выработки выходных параметров, при этом гироплатформа связана с объектом карданным подвесом, который снабжен по осям подвеса следящими двигателями.
Недостатком этой системы являются массогабаритные, точностные и стоимостные характеристики.
Целью изобретения является улучшение тактико-технических характеристик гироскопической навигационной системы.
Технический эффект достигается тем, что карданный подвес выполнен двухосным, а на гироплатформе установлен одноосный гиростабилизатор, выход которого соединен с третьим входом блока управления и выработки выходных параметров.
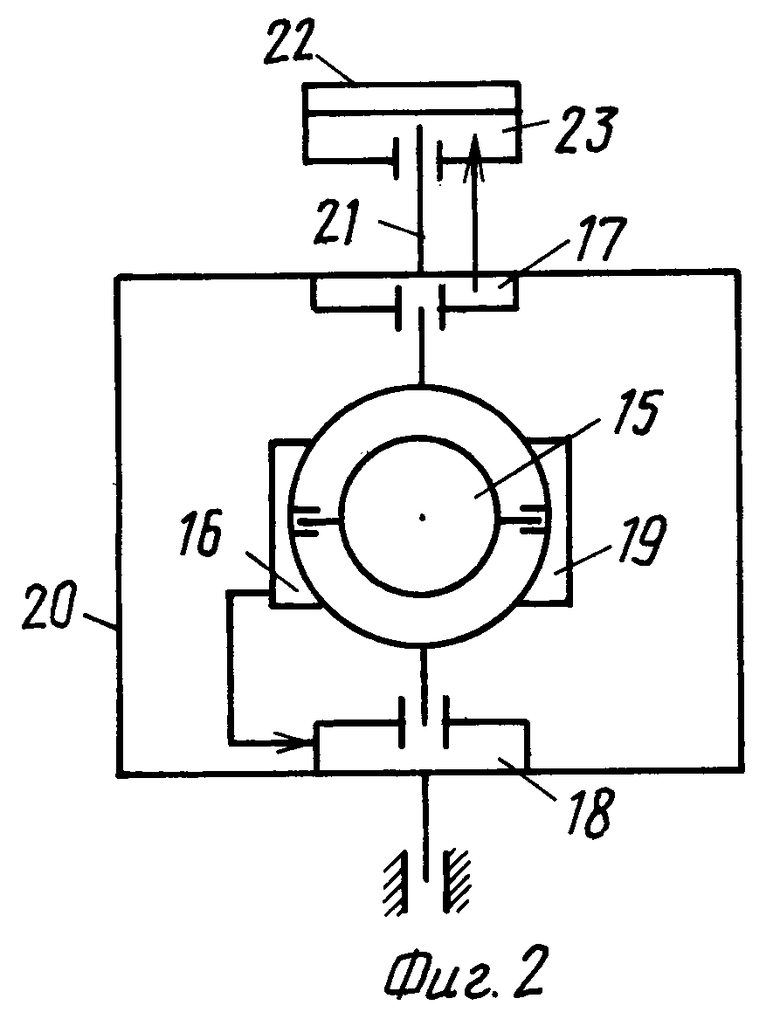
На фиг. 1 представлена функциональная схема гироскопической навигацинной системы, где приняты следующие обозначения:
1 - блок управления и выработки выходных параметров;
2 - гироплатформа;
3 - трехстепенной гироскоп;
4, 5 - датчики момента гироскопа;
6, 7 - датчики угла гироскопа;
8 - одноосный гиростабилизатор;
9, 10 - акселерометры;
11, 12 - датчики углов качек;
13, 14 - следящие двигатели.
Гироскопическая навигационная система содержит блок управления и выработки выходных параметров 1, гироплатформу 2. На гироплатформе расположены трехстепенной гироскоп 3 с датчиками момента 4, 5 и датчиками угла 6, 7, одноосный гиростабилизатор 8, ось стабилизации которого перпендикулярна плоскости гироплатформы, акселерометры 9, 10. По осям карданного подвеса установлены датчики углов качек 11, 12 и следящие двигатели 13, 14.
Гироскопическая навигационная система функционирует следующим образом.
Гироплатформа 2 с помощью следящих двигателей 13, 14 по сигналам рассогласования датчиков угла 6, 7 гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. По сигналам акселерометров 9, 10 и одноосного гиростабилизатора 8 гироплатформу с помощью датчиков момента гироскопа 3 удерживают в плоскости горизонта. По сигналам управления гироскопа 3 и одноосного гиростабилизатора 8 определяют в блоке управления и выработки выходных параметров 1 навигационные параметры: широту и долготу места и курс объекта.
На фиг. 2 представлена функциональная схема одноосного гиростабилизатора, где 15 - трехстепенной гироскоп; 16, 17 - датчики угла гироскопа; 18, 19 - датчики момента гироскопа; 20 - рама гиростабилизатора; 21 - ось стабилизации; 22 - датчик угла гиростабилизатора; 23 - датчик момента гиростабилизатора.
Одноосный гиростабилизатор 8 содержит трехстепенной гироскоп 15 с датчиками угла 16, 17 и датчиками момента 18, 19, раму стабилизатора 20 с осью стабилизации 21, датчик угла 22 и датчик момента 23.
Одноосный гиростабилизатор функционирует следующим образом: вредные моменты гироскопа 15 и вращение основания будут стремиться увести кожух гироскопа из плоскости рамы гиростабилизатора. С помощью датчика угла гироскопа 16 и датчика момента 18, датчика угла гироскопа 17 и датчика момента гиростабилизатора 23 кожух гироскопа все время будет удерживаться в плоскости рамы 20. Ось кинетического момента гироскопа будет сохранять неподвижное в инерциальном пространстве положение вокруг оси стабилизации 21. Датчик угла стабилизатора 22 будет передавать положение оси кинетического момента гироскопа относительно гироплатформы в блок управления и выработки выходных параметров 1.
С одноосным гиростабилизатором 8 свяжем правую систему координат X1Y1Z1, которая в этом случае будет являться приборной системой координат. Ось OY1 направим по оси кинетического момента, ось OZ1 - вверх по оси стабилизации. С гироплатформой свяжем систему координат XYZ. Ось OY находится в диаметральной плоскости объекта. Ось OZ перпендикулярна гироплатформе и направлена вверх. Система координат X1Y1Z1 образуется из системы XYZ поворотом на угол C вокруг оси OZ.
Направляющие косинусы между системами координат XYZ и X1Y1Z1: = cosC,
= cosC, = sinC,
= sinC, = -sinC,
= -sinC, = cosC,
= cosC, = 0,
= 0,
C - угол между осями OY и OY1.
Для выработки навигационных параметров и вертикали места измеряют составляющие кажущегося ускорения при помощи акселерометров, формируют сигналы управления гироплатформой, отрабатывают сформированные сигналы при помощи гироскопа. При этом сигналы акселерометров перепроектируют на горизонтальные оси трехгранника, связанного с одноосным гиростабилизатором, интегрируют значения перепроектированных сигналов акселерометров, вырабатывают сигналы горизонтальных составляющих абсолютной угловой скорости трехгранника, связанного с одноосным гиростабилизатором, которые проектируют на горизонтальные оси, связанные с гироплатформой для выработки сигналов управления гироплатформой.
Алгоритмически это выглядит следующим образом:


где ax,ay - проекции ускорения вершины трехгранника XYZ на осях OX и OY; - проекции ускорения вершины трехгранника X1Y1Z1 на его осях OX1 и OY1;
- проекции ускорения вершины трехгранника X1Y1Z1 на его осях OX1 и OY1;
Ωx,ωy - сигналы управления гироплатформой.
Широта места - ϕ , долгота места - λ , путевая скорость объекта - V и курс объекта K могут врабатываться, как обычно, по кинематическим уравнениям, используя, например, значения составляющих абсолютной угловой скорости приборного трехгранника.
Источники информации
Кошляков В. Н. Задачи динамики твердого тела и прикладной теории гироскопов. - М.: Наука, 1985 г., с 236-248.
Система может быть использована для обеспечения навигации движущихся объектов. На гироплатформе установлены трехстепенный гироскоп с датчиками угла и момента, первый и второй акселерометры. Ось кинематического момента гироскопа перпендикулярна плоскости гироплатформы. Оси чувствительности акселерометров ортогональны между собой и параллельны плоскости гироплатформы. Гироплатформа связана с объектом двухосным карданным подвесом, который снабжен по осям подвеса следящими двигателями. На гироплатформе установлен также одноосный гиростабилизатор. Входы датчиков момента гироскопа связаны с первым и вторым выходами блока управления и выработки выходных параметров. Выходы акселерометров соединены с первым и вторым входами блока управления. Выход одноосного гиростабилизатора соединен с третьим входом блока управления. Обеспечивается улучшение тактико-технических характеристик навигационной системы. 2 ил.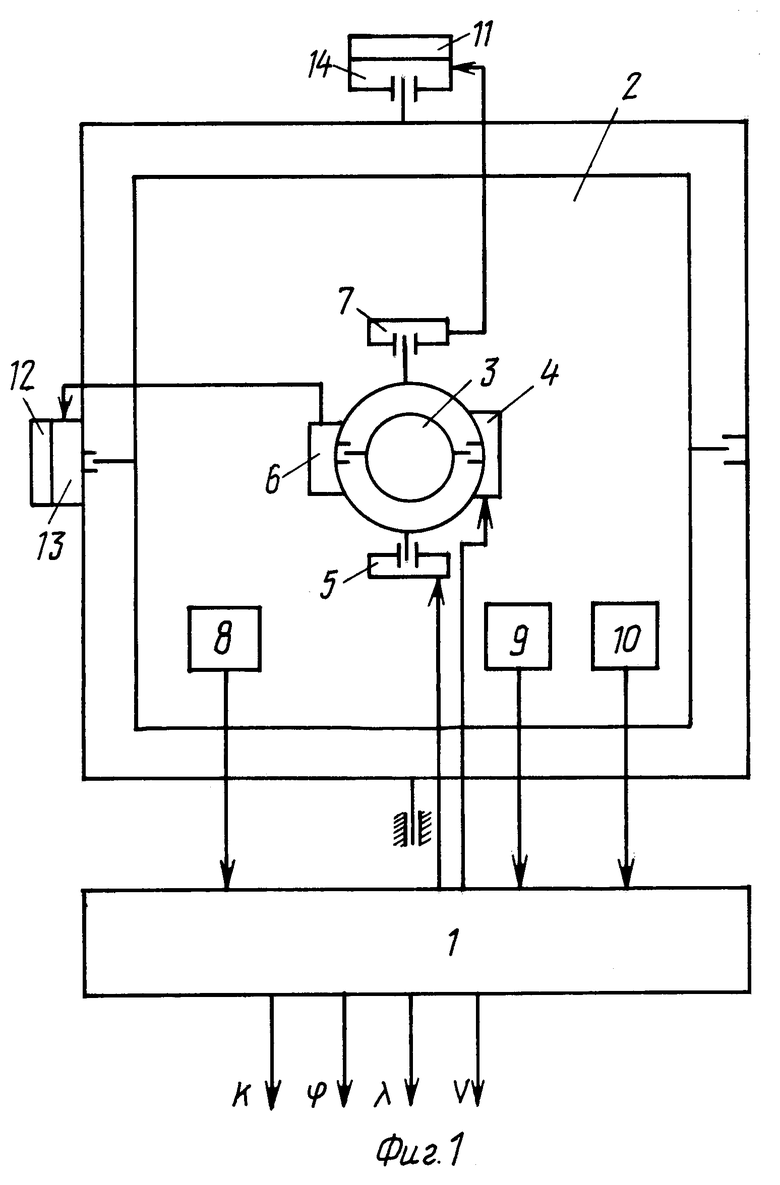
Гироскопическая навигационная система, содержащая блок управления и выработки выходных параметров, гироплатформу, на которой установлены трехстепенной гироскоп с датчиками момента и датчиками угла, ось кинетического момента гироскопа перпендикулярна плоскости гироплатформы, входы датчиков момента гироскопа связаны с первым и вторым выходами блока управления и выработки выходных параметров, первый и второй акселерометры, оси чувствительности которых ортогональны между собой и параллельны плоскости гироплатформы, выходы которых соединены с первым и вторым входами блока управления и выработки выходных параметров, при этом гироплатформа связана с объектом карданным подвесом, который снабжен по осям подвеса следящими двигателями, отличающаяся тем, что карданный подвес выполнен двухосным, а на гироплатформе установлен одноосный гиростабилизатор, выход которого соединен с третьим входом блока управления и выработки выходных параметров.
| RU 2000544 С, 07.09.93 | |||
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
| Складной поддон | 1984 |
|
SU1212876A2 |
| US 5359889 А, 01.11.94 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |
