Изобретение относится к методам и средствам ориентации в пространстве подвижных объектов на основе гравиметрических измерений в интересах навигации и управления движением подвижных объектов и, непосредственно, в геодезической гравиметрии. Предлагаемые технические решения, объединенные единым изобретательским замыслом, относятся к новому направлению гравиметрии, обусловленному освоением ряда высоких технологий, как в части построения электронно-механических устройств, так и в части создания систем обработки информации, позволяющих на новом качественном уровне применить гравиметрические измерения как для решения широкого спектра традиционных задач гравиметрии, так и в области навигации, в системах автоматического управления движением, в геофизике, геодезии и геологии.
Целью изобретения является разработка устройства и способа его использования:
- для определения углов наклона осей связанной системы координат объекта относительно вектора силы тяжести, т.е. создания гравивертиканта в интересах систем автоматического управления движением подвижных объектов;
- для гравиметрического определения плоскости истинного (географического) меридиана в интересах ориентации подвижных объектов;
- для определения ускорения силы тяжести гравиметром в интересах гравитационной разведки при поиске полезных ископаемых и решения других задач гравиметрии.
Параметры, определяющие угловое положение подвижного объекта и движение его центра масс, измеряются относительно какой-либо системы координат, принятой за начало отсчета. Для удобства пользования навигационные системы координат связывают с какими-либо телами, траекториями движения тел или полями различной физической природы. Все эти системы можно разделить на две группы: инерциальные и неинерциальные.
Подвижный объект обычно не имеет непосредственной связи с этими системами координат. Поэтому, чтобы измерять навигационные параметры, необходимо иметь на объекте «копии» или «дублеры» навигационных систем координат. Иначе говоря, на объекте должны быть устройства, реализующие такие системы координат, оси которых были бы параллельны осям внешних навигационных систем координат. Имея на объекте системы координат, параллельные внешним навигационным системам координат, можно относительно них определять угловое положение объекта, направление и величину ускорений, скорости движения и его местоположение.
Для определения места точки на поверхности Земли и околоземном пространстве используются системы координат, жестко связанные с Землей. Таких систем много. В данном конкретном случае нас интересует одна из разновидностей, так называемой, горизонтальной системы координат.
Для определенности используем систему координат OXYZ, в которой горизонтальная ось ОХ направлена в сторону северного географического полюса и касается географического меридиана, горизонтальная ось OY направлена на восток, а вертикальная ось OZ совпадает с линией отвеса или геоцентрической вертикали.
Основными элементами, подлежащими реализации в различных горизонтальных системах координат, являются: вертикаль места и направление меридиана.
Реализация направления меридиана на борту объекта может быть реализована различными компасами и курсовыми системами.
Реализация направления вертикали места осуществляют различными способами. Рассмотрим способы определения вертикали, наиболее известные, и в какой-либо мере применяемые на практике.
Маятник и его разновидности - пузырьковый и шариковый уровни - позволяют определять направление линии отвеса при основании, не подверженном ускорениям относительно поверхности Земли. Если основание движется с горизонтальным ускорением, то по окончании переходного процесса маятник или уровень устанавливается по направлению результирующей силы, равной геометрической сумме силы тяжести, и силы, направленной в сторону, противоположную направлению ускорения. Угол отклонения маятника относительно вертикали места зависит от ускорений, вызванных силой, приложенной к объекту.
Направление, определяемое маятником, называется кажущейся вертикалью. Следовательно, маятник обладает существенным недостатком - возмущаемостью со стороны ускорений, вызванных движением объекта. Вследствие этого маятники на подвижных объектах для определения местной вертикали используются очень редко.
Свободный гироскоп, будучи направлен по вертикали места, может некоторое время сохранять это направление. Однако вследствие вращения Земли и движения объекта вокруг Земли гироскоп будет иметь кажущийся уход относительно вертикали места так, например, на экваторе уход гироскопа только за счет вращения Земли будет составлять 15' за минуту. Свободный гироскоп может быть применен в качестве вертикали только кратковременно.
Гировертикаль содержит гироскоп, управляемый маятником. При длительном действии горизонтального ускорения гировертикаль устанавливается по направлению кажущейся вертикали. Кратковременные возмущения со стороны горизонтальных ускорений не вызывают существенных отклонений гировертикали, что является ее достоинством. Гировертикали широко применяются на самолетах, и их точность лежит в пределах 0,5-2°.
Гироинерциальная вертикаль основана на интегральной коррекции, заключающейся в том, что сигнал от акселерометра подается на двигатель коррекции гироскопа через интегратор, благодаря чему ускорения движения объекта не вызывают погрешностей вертикали.
Инерциальный построитель содержит свободные гироскопы, относительно которых при помощи привода поворачивается платформа с акселерометрами. Параметры прибора подбирают таким, чтобы угол поворота платформы относительно гироблока был равен углу поворота вертикали места относительно вертикали места начала движения. Свойства гироинерциальной вертикали и инерциального построителя вертикали примерно одинаковые. Точность инерциальных вертикалей зависит от качества гироскопов, интеграторов и моментных двигателей и может быть доедена до единиц угловых минут.
Оптическая вертикаль основана на использовании трех или четырех телескопов, автоматически следящих за видимым горизонтом Земли. Оптические оси телескопов образуют трехгранную или четырехгранную пирамиду, ось которой проходит через центр Земли и является искомым направлением вертикали. Оптическая вертикаль не зависит от ускорений движения летательного аппарата. Погрешности прибора определяются особенностями видимости горизонта Земли, искажениями сферической формы Земли и погрешностями элементов конструкции. Предполагаемая точность может составлять доли градуса.
Аналитическая вертикаль. Если траекторию движения объекта можно заранее определить с высокой точностью, то направление вертикали южно определить аналитически, т.е. вычислить и построить в пространстве. В этом устройстве телескоп автоматически следит за звездой и служит началом отсчета углов поворота вертикали, неподвижным относительно инерциального пространства. Погрешности аналитической вертикали зависят от погрешностей прогнозирования законов движения объекта и погрешностей самого прибора. Кроме рассмотренных, могут быть и другие виды вертикалей, основанные на различных принципах действия.
Анализ свойств рассмотренных вариантов реализации вертикали на борту подвижного объекта приводит к выводу об актуальности обоснования и создания устройств, «воссоздающих» вертикаль на борту объекта, устраняющих основные недостатки характеристик применяемых в настоящее время устройств.
Решение этой проблемы является целью предлагаемого изобретения.
Для определения положения подвижного объекта - носителя измерительного устройства в пространстве пользуются системой координат, жестко связанной с объектом, так называемой связанной системой координат OX1Y1Z1. Определим начало координат этой системы в центре масс объекта, ось ОХ1 направим вперед по продольной оси, ось OY1 - вправо, а ось OZ1 - вниз к центру Земли.
Положение связанной системы координат объекта OX1Y1Z1 относительно горизонтальной системы координат OXYZ, в которой определен вектор силы тяжести, определяется тремя направляющими косинусами вектора силы тяжести в связанной системе координат объекта. Решение этой задачи датчиком устройства для определения углового положения подвижного объекта производят способом одновременного измерения проекций вектора силы тяжести на плоскости связанной системы координат произвольно расположенного в пространстве датчика устройства.
Возможность таких измерений заключается в использовании свойств измерительного векторного преобразователя, в котором взаимодействие вектора чувствительного элемента преобразователя и вектора силы тяжести приводит к образованию механического момента, вектор которого перпендикулярен плоскости, в которой они расположены.
Действительно, взаимодействующие полярные векторы, лежащие в одной плоскости, образуют аксиальный вектор, который перпендикулярен этой плоскости.
Поясним, во-первых, что векторы, положение которых не зависит от выбранной системы координат, называются полярными, а векторы, которые зависят от принятой системы координат, называются аксиальными (от латинского aksialis - осевой, что связано с отличием механического момента относительно точки и относительно оси) или псевдовекторами.
Измерители первого типа являются измерителями полярных векторов, а второго типа - измерителями аксиальных векторов (Гольдфайн И.А. Элементы векторного исчисления, ГОСТЕХИЗДАТ, 1945, стр.53).
Во-вторых, гравиметры, измеряющие полярные векторы, по терминологии гравиметрической науки называются неастазированными, а гравиметры, измеряющие аксиальные векторы, называются астазированными.
После этого краткого введения вернемся к цели предлагаемого изобретения, заключающейся в разработке устройства и реализующего его способа для определения модуля вектора силы тяжести и его углового положения в связанной системе координат объекта, что равноценно определению положения этой системы относительно вектора силы тяжести.
Цель реализуется путем использования свойств измерительного векторного преобразователя, в котором взаимодействие вектора чувствительного элемента преобразователя и вектора силы тяжести приводит к образованию механического момента, вектор которого перпендикулярен плоскости, в которой они расположены. Измерение проекций вектора силы тяжести на плоскости связанной системы координат датчика устройства, которые зависят от взаимного углового расположения систем координат, могут быть измерены только предлагаемым устройством.
Таким образом, использование устройства для определения углового положения объекта, то есть, возможность измерения проекции вектора на плоскости связанной системы координат устройства достигается использованием свойств измерительных преобразователей аксиальных векторов, в которых взаимодействие векторов (измеряемого и вектора чувствительного элемента преобразователя) приводит к образованию аксиального вектора момента.
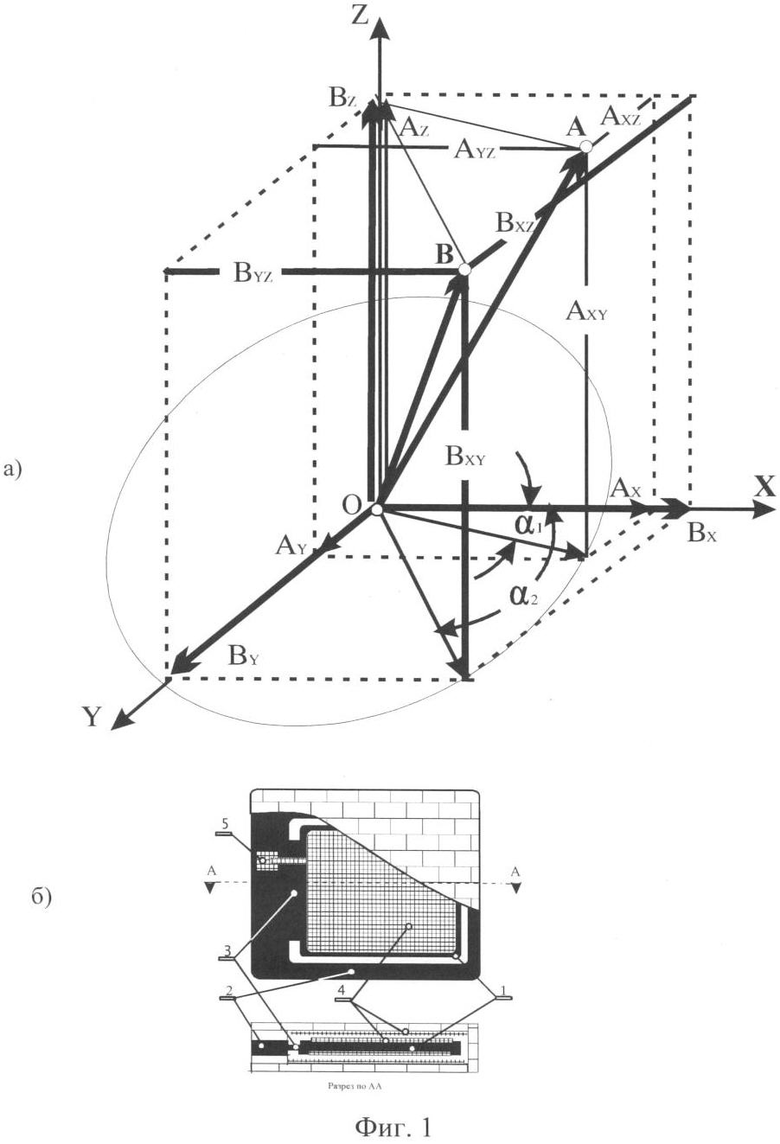
Примером такого преобразователя может служить астазированный гравиметрический преобразователь. На фиг.1б представлена примерная конструкция такого преобразователя типа консольной балки в интегральном исполнении, где:
1 - чувствительный элемент - инерционная масса на консольной балке (лепестке);
2 - кремниевое основание;
3 - ослабленное сечение балки - торсион;
4 -стеклянные крышки;
5 - подвижные и неподвижные пластины конденсатора вторичного преобразователя.
Под действием силы тяжести на инерционную массу, расположенную на консольной балке, к ее ослабленному сечению - торсиону, прикладывается механический момент, составляющая которого, совпадающая с осью поворота балки, уравновешивается механическим моментом сопротивления торсиона, которая посредством вторичного измерительного преобразования, в данном примере электроемкостного, поступает в измерительный канал для получения результата. Таким образом, взаимодействие векторов силы тяжести и векторов чувствительных элементов, лежащих в одной плоскости, приводит к образованию векторов механических моментов, перпендикулярных этой плоскости. Прототипом предлагаемого устройства является наземный гравиметрический датчик истинных азимутов и углов отклонения его системы координат относительно вектора силы тяжести (патент на изобретение №2260176, зарегистрирован 10.09.2005 г.).
В прототипе для измерения трех проекций измеряемого вектора на координатные плоскости используется шесть идентичных гравиметрических преобразователей, исходя из того, что для этого каждой полуоси системы координат должен соответствовать один такой преобразователь.
В отличие от прототипа в предлагаемом устройстве исходят из того, что, так как для измерения одной проекции вектора на плоскость необходимо измерить две проекции точки основания перпендикуляра на оси координат, лежащие в этой плоскости, то на каждой оси необходимо провести измерение аналогичным преобразователем. Это можно решить, если каждой оси связанной системы координат устройства (фиг.2б) будет соответствовать один однокомпонентный гравиметрический преобразователь. Таким образом, задача решается только тремя преобразователями. При этом, так как измеряемые каждым преобразователем механические моменты пропорциональны соответствующим измеряемым проекциям силы тяжести, то, благодаря совокупности существенных признаков устройства, определяемой взаимным расположением преобразователей, получают данные для вычисления искомых величин.
Покажем, что, действительно, проекция вектора на координатные плоскости закономерно зависит от взаимного углового положения систем координат, в которых определены взаимодействующие векторы. Так, если измеряемый вектор из положения А повернуть в положение В (смотри построения на фиг.1а), его проекции на плоскости XOZ и YOZ изменятся, а проекция на координатную ось OZ останется прежней, независимо от поворота. Таким образом, измерения проекций на координатные плоскости несут информацию о повороте (взаимном угловом положении систем координат) в отличие от результатов измерения проекции вектора на координатную ось. В данном примере эта информация заключена в значении отношения проекций вектора на плоскости, в которых лежит координатная ось.
Из анализа рассмотренной ситуации следует, что для того чтобы подобные измерения можно было бы осуществить не только при расположении измерителя на горизонтальной плоскости, но и в любом пространственном положении, следует обеспечить измерение составляющих вектора G в этих положениях. Это можно решить, если каждой оси системы координат измерителя будет соответствовать подобный рассмотренному выше однокомпонентный преобразователь.
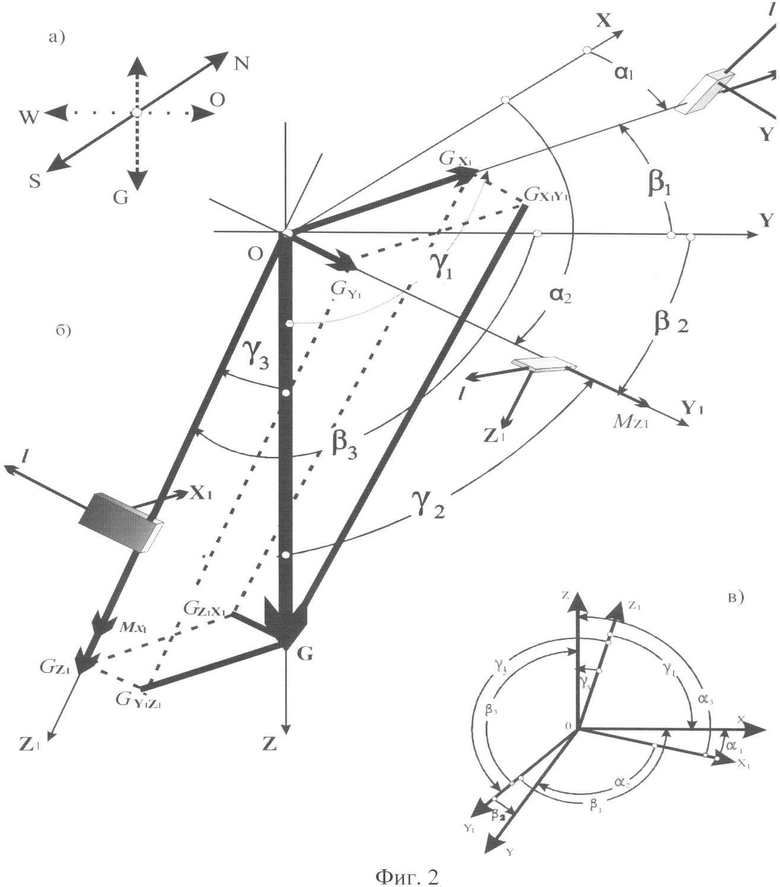
Исходя из этого, вырисовывается облик датчика устройства в следующем виде. На общем основании размещены три гравиметрических преобразователя, так, что их измерительные оси (оси поворота) параллельны этим осям, соответственно, а оси чувствительности других преобразователей, измерительные оси которых лежат в одной плоскости, взаимно перпендикулярны (фиг.2б). На фиг.2б изображены все три преобразователя в системе координат датчика устройства, совмещенной с горизонтальной системой координат (фиг.2а), в которой определен вектор силы тяжести G, имеющих общее начало координат. Преобразователи изображены схематически в виде консольных балок-лепестков, являющихся векторами их чувствительных элементов. Оси поворота параллельны соответствующим осям координат. Взаимное положение лепестков преобразователей соответствует существенным признакам заявленного изобретения. На каждом лепестке преобразователя определено направление вектора чувствительного элемента l.
Так как для определения результатов взаимодействия всех трех преобразователей с вектором тяжести при любом положении измерителя в системе координат вектора тяжести необходимо переносить взаимодействующие векторы в одну из систем координат, то возникает необходимость рассмотреть подробнее общий случай взаимного
расположения прямоугольных систем координат устройства OX1Y1Z1 и системы OXYZ, в которой определен вектор силы земного притяжения, имеющих общее начало и различные направления осей координат (фиг.2в). Поскольку для определения вектора в любой системе координат достаточно знать координаты точки конца вектора, то возникает вопрос, как, зная координаты какой-либо точки в одной из этих систем, определить координаты той же точки в другой системе. Положение одной системы относительно другой будет определено, если задать углы каждой из осей одной системы относительно другой [Власов А.К. Курс высшей математики. М., Л., стр.178, Госиздательство технико-теоретической литературы, 1952]. Назовем углы оси ОХ1 с осями OX, OY, OZ соответственно через α1, β1, γ1, углы оси Y1 с осями OX, OY, OZ - через α2, β2, γ2, углы OZ1 с осями OX, OY, OZ - через α3, β3, γ3. Чтобы легче запомнить и пользоваться этими обозначениями, запишем их в форме следующей таблицы.
Угол между осями, указанными в начале строки и столбца; например, буква γ2 обозначает угол между осями OY1 и OZ. Девять углов этой таблицы и координаты точки в той и другой системах связаны представленными ниже закономерностями - формулами (1), (2), которые позволяют осуществить переход от одной системы прямоугольных координат к другой.
x1=х·cosα1+y·cosβ1+z·cosγ1
y1=x·cosα2+y·cosβ2+z·cosγ2(1)
z1=x·cosα3+y·cosβ3+z·cosγ3
x=x1·cosα1+y1·cosα2+z1·cosα3
y=x1·cosβ1+y1·cosβ2+z1·cosβ3(2)
z=x1·cosγ1+y1·cosγ2+z1·cosγ3
Перенесем вектор G из своей системы в систему координат вектора преобразователей, пользуясь формулами (1). Любой вектор в любой системе координат определяется координатами точки конца вектора. Применительно к вектору G в системе координат, в которой он определен, имеем: Gx=0; Gy=0; Gz=G.
Аналогично, каждый из векторов чувствительных элементов преобразователей в связанной системе координат измерительного устройства имеет соответствующие координаты, отличающиеся друг от друга.
Так, например, для преобразователя, измерительная ось которого параллельна координатной оси OY, имеем: lх1=l; lу1=0: lz1=0;
для преобразователя, измерительная ось которого параллельна координатной оси OZ, имеем: lx1=l; lу1=0; lz1=0;
для преобразователя, измерительная ось которого параллельна координатной оси ОХ, имеем: lx1=0; ly1=0; lz1=l.
В результате переноса вектора G в связанную систему координат вектора измерительного устройства в соответствии с формулами (1) и с учетом того, что Gx=0; Gy=0; Gz=G, получим:
Gx1=Gx·cosα1+Gy·cosβ1+Gz·cosγ1=Gz·cosγ1;
Gy1=Gx·cosα2+Gy·cosβ2+Gz·cosγ2=Gz·cosγ2;
Gz1=Gx·cosα3+Gy·cosβ3+Gz·cosγ3=Gz·cosγ3.
Исходя из этого, определим проекции создаваемых механических моментов каждым из преобразователей в результате взаимодействия с вектором G в системе координат измерительного устройства. Для этого воспользуемся общим видом векторного произведения взаимодействующих векторов: М=l×G в проекциях на оси декартовой системы координат, в которой определены векторы гравиметрических преобразователей, применительно к механическому моменту, прилагаемому к измерительному устройству всеми преобразователями:
Mx1=ly1·Gz1-lz1·Gy1;
My1=ly1·Gx1-lx1·Gz1;
Mz1=lx1·Gy1-ly1·Gx.
Применительно к преобразователю, измерительная ось которого параллельна координатной оси OY, имеем: lx1=l; ly1=0: lz1=0;
Mx1=ly1·Gz-lz1·Gy=ly1·G·cosγ3-lz1·G·cosγ2=0;
My1=ly1·Gx-lx1·Gz=ly1·G·cosγ1-lx1·G·cosγ3=l·G·cosγ3;
Mz1=lx1·Gy-ly1·Gx=lx1·G·cosγ2-ly1·G·cosγ1=l·G·cosγ2.
Измеряемым моментом является Mz1=l·G·cosγ2.
Для преобразователя, измерительная ось которого параллельна координатной оси OZ, имеем: lx1=0; ly1=l; lz1=0;
Мх1=ly1·Gz-lz1·Gy=ly1·G·cosγ3-lz1·G·cosγ2=lу1·G·cosγ3;
My1=lz1·Gx-lx1Gz=lz1·G·cosγ1-lx1·G·cosγ3=0;
Mz1=lx1Gy-ly1·Gx=lx1·G·cosγ2-ly1·G·cosγ1=l·G·cosγ1.
Измеряемым вектором является Mx1=l·G·cosγ3.
Для преобразователя, измерительная ось которого параллельна координатной оси ОХ, имеем: lx1=0; lу1=0; lz1=l;
Mx1=ly1·Gz-lz1·Gy=lУ1·G·cosγ3-lz1·G·cosγ2=l·G·cosγ2;
My1=lz1·Gx-lx1·Gz=lz1·G·cosγ1-lx1·G·cosγ3=l·G·cosγ1;
Мz1=lx1·Gy-ly1·Gx=lx1·G·cosγ2-ly1·G·cosγ1=0.
Измеряемым вектором является My1=l·G·cosγ1.
Сущность изобретения иллюстрируется графическими материалами.
На фиг.1а иллюстрируется отличие свойств проекций вектора на координатные плоскости от проекций на сами оси координат в зависимости от взаимного углового положения систем координат измерителя и измеряемого вектора.
Фиг.1б. Примерная конструкция интегрального астазированного гравиметрического
преобразователя типа консольной балки.
На фиг.2а представлена горизонтальная система координат.
Фиг.2б. Размещение преобразователей, соответствующее существенным признакам изобретения, в совмещенных системах координат (фиг.2в).
Итак, нам известны характеристики измерительного устройства, такие как: коэффициент преобразования устройства - К, проекции - l всех векторов чувствительных элементов преобразователей на оси системы координат устройства OX1 OY1 Z1, само значение массы m чувствительных элементов. Кроме того, из аналитической геометрии известны системы уравнений (1) и (2) преобразования координат при переходе из одной системы координат в другую, имеющих общее начало координат и различные направления осей. Известны соотношения, которым должны удовлетворять девять улов между осями координат при их рассогласовании:
cos2α1+cos2β1+cos2γ1=1
cos2α2+cos2β2+cos2γ2=1(3)
cos2α3+cos2β3+cos2γ3=1.
И, наконец, в результате измерений будут получены значения моментов, измеренных всеми преобразователями, что позволит вычислить искомые величины.
Покажем, что данные измерений, полученные всеми тремя преобразователями, позволяют вычислить модуль вектора G. Действительно, модуль вектора G пропорционален геометрической сумме механических моментов, создаваемых всеми тремя преобразователями измерительного устройства: |G|=К·М1, где:
К - коэффициент преобразования устройства;
М1 - геометрическая сумма моментов, создаваемых тремя преобразователями по трем осям связанной системы координат измерительного устройства;
Мх1 МУ1, Мz1 - механические моменты, приложенные к осям OX, OY, OZ, соответственно. М1 вычисляется из выражения: М1 2=Мх1 2+Му1 2+Мz1 2.
Значение силы тяжести G, пропорциональное измеренному значению суммарного механического момента М1 и коэффициенту преобразования К устройства, вычисляется из выражения
G2=К2·М1 2=(Мх1 2+Му1 2+Мz1 2)·К2=(g·m)2,
откуда: g=К·М1/m, где g - ускорение силы тяжести.
Как следует из анализа фиг.2б, кроме возможности вычислить модуль вектора силы тяжести, имеется возможность вычислить взаимное угловое положение системы координат устройства в горизонтальной системе координат, в которой определен вектор силы тяжести.
Как уже рассматривалось ранее, информация о взаимном угловом положении систем координат заключена в значениях отношений проекций вектора на соответствующие плоскости.
Так, обозначив значение отношения измеренных моментов:
Му1 и Мх1, создаваемых относительно осей OY1 и ОХ2, через а,
Мх1 и Mz1, создаваемых относительно осей OX1 и OZ1, через б,
My1 и Mz1, создаваемых относительно осей OY1 и OZ1, через с запишем:
cos γ1=a·cosγ3; cosγ2=cosγ3/б; cos2γ1+cos2 γ2+cosγ3=1;
a2·cos2γ3+1/б2·cos2γ3+cos2γ3=1; cos2γ3·(а2+1/б2+1)=1, откуда:

Так как положение связанной системы координат объекта OX1Y1Z1 относительно вектора силы тяжести определяется тремя направляющими косинусами вектора силы тяжести в этой системе, каковыми являются косинусы углов γ1, γ2, γ3, то они и являются решением задачи.
Анализируя признаки предлагаемого изобретения, можно выделить среди них следующие существенные признаки, заключающиеся в том что:
1) устройство содержит датчик, состоящий из трех идентичных однокомпонентных астазированных гравиметрических преобразователей, взаимное расположение которых позволяет измерять проекции вектора силы тяжести на плоскости связанной системы координат устройства, благодаря особым свойствам, обусловленным их конструкцией, при этом каждой из трех координатных осей соответствует один преобразователь, измерительная ось которого параллельна соответствующей оси координат, а оси чувствительности двух других преобразователей, измерительные оси которых лежат в одной плоскости, взаимно перпендикулярны (фиг.2б), при этом выходы всех трех преобразователей подсоединены к электронному вычислительному устройству для обработки и индикации результатов;
2) преобразователи в зависимости от конкретных условий можно размещать в датчике устройства произвольно, например, произвольно на горизонтальном или вертикальном основании, на нескольких плоскостях и т.п., но при этом должны соблюдаться условия взаимного расположения преобразователей, отвечающие требованиям, изложенным выше; основание должно быть жестким и неподвижным;
3) устройство позволяет использовать существенно более чувствительные астазированные преобразователи, одновременно придав устройству свойства независимости результатов измерения от ориентации устройства в пространстве;
4) способ реализуется путем одновременного измерения проекций вектора G на координатные плоскости связанной системы координат устройства, а не составляющих вектора силы тяжести на оси этой системы;
5) измерения производятся с произвольно расположенного в пространстве устройства;
6) измерение является относительным и для использования устройства в качестве гравиметра, требует использования гравиметрической опорной сети.
На основании анализа свойств устройства для определения углового положения подвижного объекта можно сделать вывод о том, что его существенными признаками являются:
использование специфических свойств астазированных преобразователей, измеряющих механические моменты относительно осей поворота, например, типа консольной балки;
их количество и взаимное расположение позволяет единственным образом реализовать измерения: минимальным, единственно возможным количеством идентичных однокомпонентных преобразователей, обеспечивающих измерение всех составляющих вектора силы тяжести на плоскости связанной системы координат устройства.
На основании анализа существенных признаков устройства и способа его использования можно сделать следующие выводы: сущность технического решения заключается в одновременном определении устройством проекций вектора силы тяжести на координатные плоскости его связанной системы координат; устройство отличается количеством и совокупностью астазированных преобразователей и их взаимным расположением.
Исходя из выводов анализа существенных признаков устройства и способа его использования, формула изобретения представляется в следующем ниже виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| ГРАВИМЕТРИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2149429C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| Гравиметр | 1976 |
|
SU636573A1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ГРАВИМЕТРИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2581076C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
Изобретение относится к методам и средствам ориентации в пространстве на основе гравиметрических измерений в интересах навигации и непосредственно в геодезической гравиметрии. Устройство, реализующее способ измерения проекций вектора силы тяжести на координатные плоскости, в любом пространственном положении представляет собой совокупность трех идентичных астазированных гравиметрических преобразователей, жестко связанных взаимным расположением на одном основании, причем, каждой из трех координатных плоскостей прямоугольной системы координат устройства соответствует один такой гравиметр, измерительная ось которого перпендикулярна этой плоскости, а ось чувствительности перпендикулярна плоскости, которая параллельна измерительной оси, причем оси чувствительности всех трех преобразователей (гравиметров) взаимно перпендикулярны. Устройство может использоваться одновременно как гравивертикант для систем управления и ориентации подвижных объектов, как мобильный гравиметр на подвижных объектах на суше, на море и в воздухе, для решения задач гравиразведки при поиске полезных ископаемых и других гравиметрических исследованиях. 2 н.п. ф-лы, 2 ил.
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| АДГЕЗИВЫ ДЛЯ СБОРКИ КОМПОНЕНТОВ ИНЕРТНОГО МАТЕРИАЛА | 2017 |
|
RU2744431C2 |

