Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления продольным движением летательных аппаратов.
Известен способ управления угловым движением летательного аппарата (Система автоматического управления САУ-23А серия 2. Назначение, принцип действия, законы управления. Техническое описание 6А2.550.045-4ТО (в четырех частях. Часть первая). Редакция I-77) - [1, с.20], по которому измеряют нормальную перегрузку nу, угловую скорость относительно поперечной оси ωz и скоростной напор q, задают требуемое значение нормальной перегрузки nу зад, а также формируют сигнал управления вида

где Т13, Т11 - постоянные времени фильтров, р - оператор Лапласа, iny - постоянный коэффициент пропорциональности; μz(q), μz1(q) - коэффициенты пропорциональности, изменяющиеся в зависимости от скоростного напора q.
Коррекция коэффициентов пропорциональности производится для получения одинаковых показателей переходных процессов по нормальной перегрузке при изменениях значений динамических коэффициентов летательного аппарата при смене режима движения. Коррекция коэффициентов пропорциональности усложняет схему, уменьшает надежность работы системы управления, а в большом диапазоне изменений параметров движения может оказаться нереализуемой с достаточной точностью. При этом коррекция коэффициентов пропорциональности по скоростному напору оказывается неэффективной при изменении положения центра масс летательного аппарата в процессе полета и не позволяет обеспечить одинаковых показателей переходных процессов.
Известен способ продольного управления самолетом (Михалев И.А., Окоемов Б.Н., Чикулаев М.С.Системы автоматического управления самолетом. М.: Машиностроение, 1987, 240 с.) - [2, с.136], по которому измеряют угловую скорость относительно поперечной оси ωz и приращение нормальной перегрузки Δny, задают приращение нормальной перегрузки  , а также формируют сигнал управления рулем высоты согласно формуле
, а также формируют сигнал управления рулем высоты согласно формуле

где ΔδB - угол отклонения руля высоты от балансировочного положения,
Δny - приращение нормальной перегрузки,
Δny=ny-1,
nу - нормальная перегрузка,
 - заданное приращение нормальной перегрузки,
- заданное приращение нормальной перегрузки,
ωz - угловая скорость относительно поперечной оси,
kny, μ, qny - постоянные коэффициенты передачи.
Данный автомат не позволяет получить оптимальные показатели переходных процессов вследствие использования постоянных значений коэффициентов пропорциональности в широком диапазоне изменений скоростей и высот и при изменении центровки летательного аппарата в процессе движения.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение оптимальных показателей переходных процессов по нормальной перегрузке, не требующее коррекции коэффициентов пропорциональности законов управления продольным движением летательного аппарата во всем эксплуатационном диапазоне изменений скоростей и высот полета, а также и при изменении центровки летательного аппарата в процессе движения.
Технический результат достигается тем, что по способу продольного управления самолетом, по которому измеряют угловую скорость относительно поперечной оси ωz и приращение нормальной перегрузки Δny, задают приращение нормальной перегрузки  , а также формируют сигнал управления рулем высоты согласно формуле
, а также формируют сигнал управления рулем высоты согласно формуле

где ΔδB - угол отклонения руля высоты от балансировочного положения,
Δny - приращение нормальной перегрузки,
Δny=nу-1,
nу - нормальная перегрузка,
 - заданное приращение нормальной перегрузки,
- заданное приращение нормальной перегрузки,
ωz - угловая скорость относительно поперечной оси,
kny, μ, qny - постоянные коэффициенты передачи,
формируют дополнительный сигнал вида
где

где Т - постоянная времени фильтра, р - оператор Лапласа,
ix1, ix2, iqx,  k1, k2, k3 - постоянные коэффициенты, которыми дополняют сигнал управления рулем высоты.
k1, k2, k3 - постоянные коэффициенты, которыми дополняют сигнал управления рулем высоты.
Сущность изобретения поясняется на фиг.1-фиг.4:
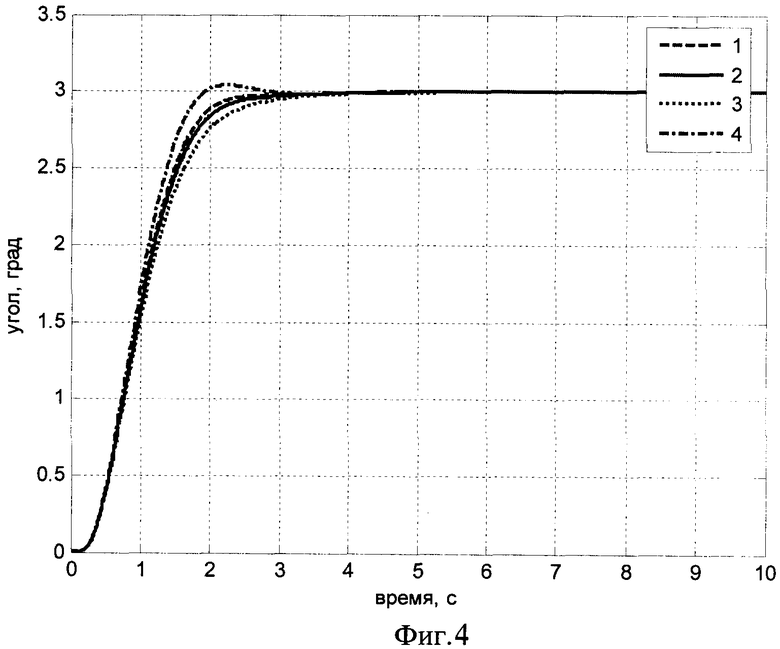
фиг.1 - блок-схема автомата продольного управления, реализующего заявляемый способ,
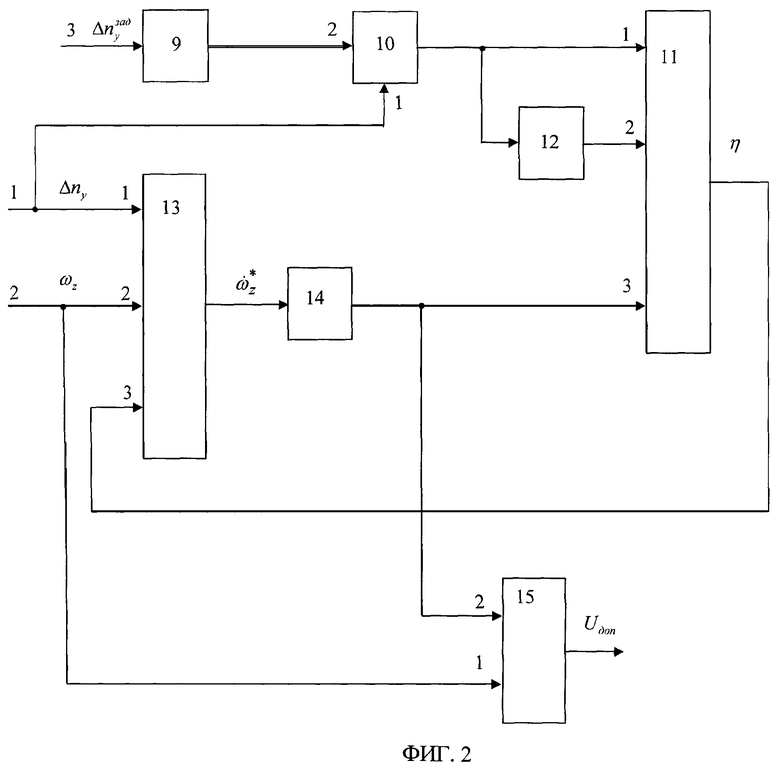
фиг.2 - блок-схема блока задания динамики продольной перегрузки,
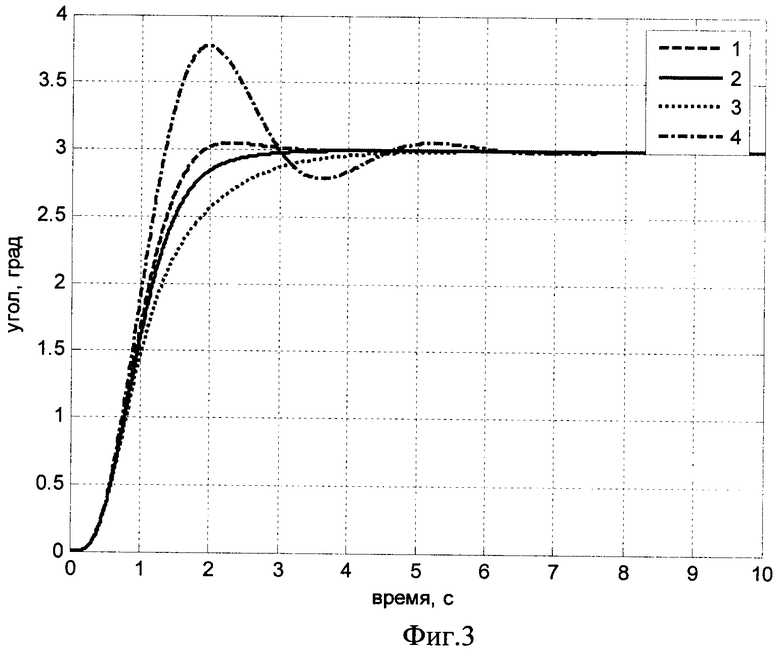
фиг.3 - графики переходных процессов летательного аппарата с автоматом продольного управления без блока задания динамики продольной перегрузки при изменении центровки летательного аппарата,
фиг.4 - графики переходных процессов летательного аппарата с автоматом продольного управления с блоком задания динамики продольной перегрузки при изменении центровки летательного аппарата.
Автомат продольного управления содержит:
1 - датчик приращения нормальной перегрузки Δny;
2 - первый сумматор;
3 - первый интегратор;
4 - первый суммирующий усилитель;
5 - привод руля высоты;
6 - датчик угловой скорости относительно поперечной оси ωz;
7 - задатчик приращения нормальной перегрузки ;
8 - блок задания динамики продольной перегрузки.
Приняты следующие обозначения:
ΔδB - угол отклонения руля высоты от балансировочного положения,
Δny - приращение нормальной перегрузки,
 - заданное приращение нормальной перегрузки,
- заданное приращение нормальной перегрузки,
ωz - угловая скорость относительно поперечной оси,
Uдоп - дополнительный сигнал.
Автомат продольного управления содержит датчик угловой скорости относительно поперечной оси ωz 6, задатчик приращения нормальной перегрузки  7, датчик приращения нормальной перегрузки Δny 1, первый сумматор 2, первый вход которого соединен с выходом датчика приращения нормальной перегрузки Δny 1, а второй, инвертирующий, вход соединен с выходом задатчика приращения нормальной перегрузки
7, датчик приращения нормальной перегрузки Δny 1, первый сумматор 2, первый вход которого соединен с выходом датчика приращения нормальной перегрузки Δny 1, а второй, инвертирующий, вход соединен с выходом задатчика приращения нормальной перегрузки  7, первый интегратор 3, вход которого соединен с выходом первого сумматора 2, первый суммирующий усилитель 4, входы которого соединены соответственно с выходами первого сумматора 2, первого интегратора 3 и датчика угловой скорости относительно поперечной оси ωz 6, а выход соединен с входом привода руля высоты 5, а также блок задания динамики продольной перегрузки 8, входы которого соединены соответственно с выходами датчика приращения нормальной перегрузки Δny 1, датчика угловой скорости относительно поперечной оси ωz 6, задатчика приращения нормальной перегрузки
7, первый интегратор 3, вход которого соединен с выходом первого сумматора 2, первый суммирующий усилитель 4, входы которого соединены соответственно с выходами первого сумматора 2, первого интегратора 3 и датчика угловой скорости относительно поперечной оси ωz 6, а выход соединен с входом привода руля высоты 5, а также блок задания динамики продольной перегрузки 8, входы которого соединены соответственно с выходами датчика приращения нормальной перегрузки Δny 1, датчика угловой скорости относительно поперечной оси ωz 6, задатчика приращения нормальной перегрузки  7, а выход соединен с первым суммирующим усилителем 4.
7, а выход соединен с первым суммирующим усилителем 4.
Блок задания динамики продольной перегрузки 8 содержит:
9 - фильтр;
10 - второй сумматор;
11 - третий суммирующий усилитель;
12 - третий интегратор;
13 - вычислитель;
14 - второй интегратор;
15 - второй суммирующий усилитель.
Приняты следующие обозначения:
 - сигнал на выходе вычислителя 13;
- сигнал на выходе вычислителя 13;
η - сигнал на выходе третьего суммирующего усилителя 11.
Блок задания динамики продольной перегрузки содержит вычислитель 13, первый и второй входы которого соответственно являются первым и вторым входами управляющего блока задания динамики продольной перегрузки 8,
второй интегратор 14, вход которого соединен с выходом вычислителя 13, второй сумматор 10, первый вход которого соединен с первым входом вычислителя 13, второй, инвертирующий, вход соединен с выходом фильтра 9. вход которого является третьим входом блока задания динамики продольной перегрузки 8,
третий интегратор 12, вход которого соединен с выходом второго сумматора 10,
третий суммирующий усилитель 11, входы которого соединены соответственно с выходами второго сумматора 10, третьего интегратора 12 и второго интегратора 14, выход соединен с третьим входом вычислителя 13, второй суммирующий усилитель 15, первый вход которого соединен со вторым входом вычислителя 13, второй, инвертирующий, вход - с выходом второго интегратора 14, а выход является выходом блока задания динамики продольной перегрузки 8.
Работа системы происходит следующим образом. Сигнал с датчика приращения нормальной перегрузки Δny 1 поступает на первый вход первого сумматора 2, на второй, инвертирующий, вход которого поступает заданное приращение нормальной перегрузки. С выхода первого сумматора 2 сформированный сигнал поступает на первый вход первого суммирующего усилителя 4 и на вход первого интегратора 3. С выхода первого интегратора 3 сигнал поступает на второй вход первого суммирующего усилителя 4, на третий вход которого поступает сигнал с датчика угловой скорости относительно поперечной оси ωz 6. На входы блока задания динамики продольной перегрузки 8 поступают соответственно сигналы приращения нормальной перегрузки Δny, угловой скорости относительно поперечной оси ωz и заданного приращения нормальной перегрузки .
Вычислитель 13 блока задания динамики продольной перегрузки 8 работает в соответствии с уравнением
где Δny, ωz, η - сигналы соответственно на первом, втором и третьем входах вычислителя,
k1, k2, k3 - постоянные коэффициенты,
 - сигнал на выходе вычислителя.
- сигнал на выходе вычислителя.
С выхода вычислителя 13 сигнал поступает на второй интегратор 14, работающий в соответствии с алгоритмом
Сигнал заданного приращения нормальной перегрузки  поступающий на третий вход блока задания динамики продольной перегрузки 8, проходит через фильтр 9 с передаточной функцией вида
поступающий на третий вход блока задания динамики продольной перегрузки 8, проходит через фильтр 9 с передаточной функцией вида
где Т - постоянная времени, р - оператор Лапласа,
и поступает на второй, инвертирующий, вход второго сумматора 10, первый вход которого соединен с первым входом вычислителя 13. На выходе второго сумматора 10 формируется сигнал
Введение фильтра 9 уменьшает перерегулирование при выходе на заданное значение нормальной перегрузки.
С выхода второго сумматора 10 сигнал поступает на вход третьего интегратора 12, на выходе которого формируется сигнал вида
Введение третьего интегратора 12 позволяет устранить статическую ошибку по приращению перегрузки при изменении центровки летательного аппарата в процессе полета.
На выходе третьего суммирующего усилителя 11 формируется сигнал вида

где ix1, ix2, iqx - постоянные передаточные числа.
С выхода третьего суммирующего усилителя 11 сформированный сигнал η поступает на третий вход вычислителя 13.
Выходом блока задания динамики продольной перегрузки 8 является выход второго суммирующего усилителя 15, где формируется дополнительный сигнал вида
где  - постоянные передаточные числа,
- постоянные передаточные числа,
ωz,  - сигналы соответственно на первом и втором входах.
- сигналы соответственно на первом и втором входах.
С выхода блока задания динамики продольной перегрузки 8 сформированный дополнительный сигнал поступает на вход первого суммирующего усилителя 4, выход которого соединен с приводом руля высоты 5.
Дополнительный сигнал, сформированный в блоке задания динамики продольной перегрузки 8, позволяет обеспечить дополнительное отклонение рулевого органа, необходимое для компенсации изменения динамических параметров движения летательного аппарата, возникающих при изменении режима полета. Компенсация изменения динамических параметров движения летательного аппарата позволяет обеспечить оптимальные показатели переходных процессов летательного аппарата во всем эксплуатационном диапазоне изменений скоростей и высот полета, а также и при изменении центровки летательного аппарата в процессе движения.
Эффективность применения блока задания динамики продольной перегрузки 8 подтверждается фиг.3-фиг.4. На фиг.3-фиг.4 показаны графики переходных процессов летательного аппарата с автоматом продольного управления при наличии (фиг.4) и отсутствии (фиг.3) блока задания динамики продольной перегрузки 8 при смещении центра масс летательного аппарата. В качестве летательного аппарата принят легкий самолет. Кривая переходного процесса 1 соответствует смещению центра масс летательного аппарата назад вдоль хорды крыла относительно расчетного значения. Кривая переходного процесса 2 соответствует оптимальной настройке системы управления для расчетного значения положения центра масс. Кривая переходного процесса 3 соответствует смещению центра масс летательного аппарата вперед вдоль хорды крыла относительно расчетного значения. Кривая переходного процесса 4 соответствует смещению центра масс летательного аппарата назад за точку приложения подъемной силы (летательный аппарат статически неустойчивый).
Из фиг.3 видно, что смещение центра масс летательного аппарата с автоматом продольного управления без блока задания динамики продольной перегрузки 8 приводит к значительному изменению переходных процессов. При этом не выдерживаются требуемые показатели качества переходных процессов, соответствующие переходному процессу при расчетном положении центра масс летательного аппарата.
Из фиг.4 видно, что введение блока задания динамики продольной перегрузки 8 в автомат продольного управления обеспечивает близость переходных процессов к оптимальному при смещении центра масс летательного аппарата.
Предлагаемый автомат продольного управления обеспечивает оптимальные показатели переходных процессов, не требующие коррекции коэффициентов пропорциональности законов во всем эксплуатационном диапазоне изменений скоростей и высот полета, а также и при изменении центровки летательного аппарата в процессе движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ПРОДОЛЬНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2339989C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| Способ управления рулём высоты самолёта | 2017 |
|
RU2681509C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
Изобретение относится к области приборостроения и может быть использовано для управления движением летательных аппаратов. Технический результат - расширение функциональных возможностей. Для достижения данного результата формируют дополнительный корректирующий сигнал, не требующий коррекции коэффициентов пропорциональности законов управления во всем эксплуатационном диапазоне изменений скоростей и высот полета. При этом нет необходимости контролировать изменение центровки летательного аппарата в процессе его движения. 4 ил.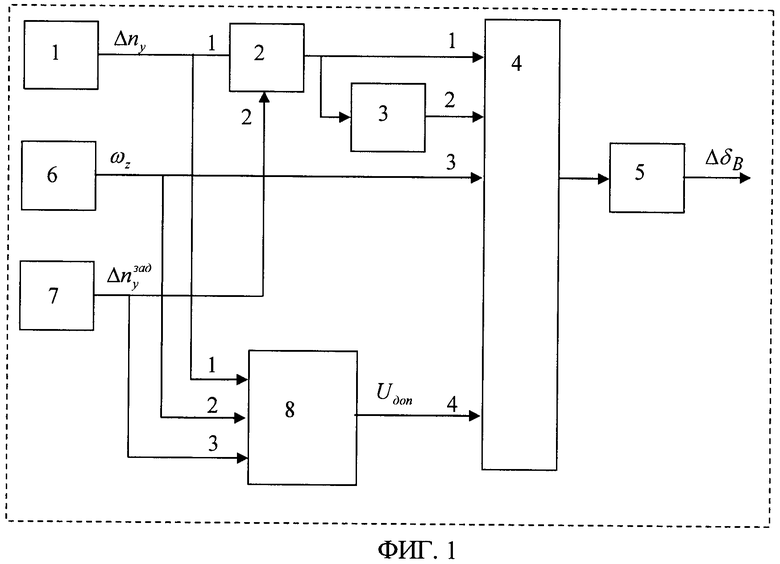
Способ продольного управления самолетом, согласно которому измеряют угловую скорость относительно поперечной оси ωz и приращение нормальной перегрузки Δny, задают приращение нормальной перегрузки  а также формируют сигнал управления рулем высоты согласно формуле
а также формируют сигнал управления рулем высоты согласно формуле

где ΔδВ - угол отклонения руля высоты от балансировочного положения;
Δny - приращение нормальной перегрузки;
Δny=ny-1;
ny - нормальная перегрузка;
 - заданное приращение нормальной перегрузки;
- заданное приращение нормальной перегрузки;
ωz - угловая скорость относительно поперечной оси;
kny, μ, qny - постоянные коэффициенты передачи,
отличающийся тем, что формируют дополнительный сигнал вида
где

где Т - постоянная времени фильтра, р - оператор Лапласа,
ix1, ix2, iqx,  k1, k2, k3 - постоянные коэффициенты, которыми дополняют сигнал управления рулем высоты.
k1, k2, k3 - постоянные коэффициенты, которыми дополняют сигнал управления рулем высоты.
| Михалев И.А., Окоемов Б.Н., Чикулаев М.С | |||
| Системы автоматического управления самолетом | |||
| М.: Машиностроение, 1987, с.136 | |||
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Шаров С.Н | |||
| Основы проектирования координаторов систем управления движущимися объектами | |||
| Учебное пособие | |||
| Гособразование СССР, 1990, с.4, рис.1.1 | |||
| RU 94033714 A1, 20.07.1996 | |||
| Система управления углом наклона траектории самолета в продольной плоскости в режиме взлета | 1990 |
|
SU1779638A1 |

