Изобретение относится к области авиации и может быть использовано в системах управления летательных аппаратов.
Известен «Способ осуществления плоского и смешанного поворотов» (Автоматическое управление движением экранопланов/ В.Б. Диомидов.- СПб: ГНЦ РФ - ЦНИИ "Электроприбор", 1996.- 204 с. ISBN 5-900780-06-6), заключающийся в задании величины отклонения курса, поворота руля направления и закрылков на величины, ей пропорциональные. При необходимости совершения плоского поворота коэффициент пропорциональности для величины поворота закрылков равен нулю.
Недостатком данного способа является то, что он не позволяет формировать траекторию движения летательного аппарата, проходящую преимущественно над ложбинами неровной поверхности, например, морских волн.
Известен «Способ управления рулём высоты самолёта» (Патент РФ № 2681509 МПК: B64C 13/00, G05D 1/00, опубл. 06.03.2019 бюл. №7), основанный на измерении угла тангажа, угла крена, вектора перегрузки, вектора угловой скорости, комплекса скоростных параметров, углов отклонения управляющих поверхностей самолета, вычислении корректирующих сигналов приращении нормальной перегрузки, приращении угловой скорости тангажа, определении заданного значения приращения нормальной перегрузки, вычислении величины позиционного сигнала управления на основе измеренных параметров движения, вычислении величины интегрального сигнала управления, формировании управляющего сигнала привода руля высоты с использованием позиционного и интегрального сигналов управления, передаче управляющего сигнала на исполнительные приводы руля высоты и соответствующим отклонении руля высоты, определении управляющего сигнала привода руля высоты в зависимости от позиционного сигнала управляемости, интегрального сигнала управляемости, корректирующего сигнала приращения нормальной перегрузки, а перед формированием управляющего сигнала привода руля высоты вводят ограничение позиционного сигнала управления максимальной и минимальной величиной.
Недостатком данного способа является то, что он не позволяет управлять движением аппарата в горизонтальной, из-за чего снижается эффективность минимизации и стабилизации высоты летательного аппарата.
Известен «Способ одноканального управления в продольном движении легкого экраноплана» (Патент РФ № 2180131 МПК: G05D 1/08, опубл. 27.02.2002, Бюл. №6), основанный на формировании сигналов, пропорциональных углу тангажа, угловой скорости и углового ускорения, формировании управляющих сигналов, пропорциональных текущим значениям угла тангажа и углового ускорения со своими коэффициентами передачи, суммировании управляющих сигналов с последующим преобразованием полученного сигнала в угловое перемещение руля высоты, причем формируют нелинейный управляющий сигнал, зависящий от величин и знаков текущих значений угла тангажа и угловой скорости вида i * ω = iω(1-k)ωz, где iω- расчетное значение коэффициента демпфирования в линейной системе; ωz- угловая скорость
где М - некоторый постоянный коэффициент; ϑ - текущее значение угла тангажа.
Недостатком данного способа является отсутствие учета рельефа подстилающей поверхности при управлении продольным движением летательного аппарата, из-за чего невозможно проводить минимизацию и стабилизацию высоты с учетом рельефа подстилающей поверхности.
Наиболее близким по технической сущности к предлагаемому способу является «Способ стабилизации заданной высоты полета» (Патент РФ № 2588174 МПК: G08G 5/00, опубл. 27.06.2016, Бюл. №18), заключающийся в использовании заданного значения истинной геометрической высоты и расстояния до программно-имитируемой «цели», измеряют истинную геометрическую высоту, находят разность между заданной и измеренной истинными геометрическими высотами, формируют и передают управляющий сигнал на руль высоты, нелинейно зависящий от разности этих значений, скорости ее изменения и расстояния до программно-имитируемой «цели».
Недостаток известного способа заключается в том, что он не позволяет достаточно снизить среднюю высоту летательного аппарата и повысить точность ее стабилизации.
Известно «Устройство управления боковым движением летательного аппарата» (Патент РФ № 2060209 МПК: B64C 13/00, опубл. 1996.05.20)
Устройство содержит последовательно соединенные датчик угла крена, первый суммирующий усилитель и первый блок ограничения, последовательно соединенные второй суммирующий усилитель, второй блок ограничения и привод элеронов, задатчик программных значений угла крена, выход которого связан со вторым входом первого суммирующего усилителя, а также датчик угловой скорости рыскания и датчик угловой скорости крена, выход которого соединен с первым входом второго суммирующего усилителя, а также дифференцирующий фильтр, вход которого связан с выходом датчика угловой скорости рыскания, а выход со вторым входом второго суммирующего усилителя, при этом выход первого блока ограничения связан с третьим входом второго суммирующего усилителя.
Недостатком данного устройства является то, что оно не позволяет формировать боковые маневры с учетом рельефа морской поверхности.
Известно «Устройство одноканального управления продольным движением легкого экраноплана» (Патент РФ № 2231104 МПК: G05D 1/08, опубл. 20.06.2004).
Устройство содержит датчик отклонения угла тангажа от опорного значения, выход которого соединен с первым входом суммирующего усилителя, датчик угловой скорости, выход которого соединен со вторым входом суммирующего усилителя, датчик линейной скорости, рулевой агрегат, непосредственно воздействующий на руль высоты, вход которого соединен с выходом суммирующего усилителя, отличающееся тем, что дополнительно введены датчик линейного ускорения и блок формирования нелинейного управляющего сигнала, первый вход которого соединен с выходом датчика линейной скорости, второй вход соединен с выходом датчика линейного ускорения, выход соединен с третьим входом суммирующего усилителя, при этом закон управления рулем высоты. Блок формирования нелинейного управляющего сигнала содержит последовательно соединенные первый блок умножения, релейный блок, первый блок усиления, а также второй блок умножения, сумматор и третий блок умножения, первый и второй входы которого соединены со вторым и первым входами первого блока умножения, а выход соединен с выходом второго блока усиления, выход которого соединен со вторым входом сумматора, первый вход которого соединен с выходом второго блока умножения, первый вход которого соединен с выходом первого блока усиления, а второй вход соединен со вторым входом первого блока умножения, при этом первый и второй входы первого блока умножения являются первым и вторым входами блока формирования нелинейного управляющего сигнала, выходом которого является выход сумматора.
Недостатком данного устройства является невозможность обеспечить требуемую эффективность стабилизации истинной геометрической высоты летательного аппарата относительно морского волнения.
Наиболее близким из числа известных технических решений является устройство управления движением экраноплана (Небылов А.В. Измерение параметров полета вблизи морской поверхности, ГААП, СПб., 1994. 307 с. ISBN 5-230-10-349-3), состоящее из трех точечных локационных высотомеров, выходы которых соединены со входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, доплеровского датчика вертикальной скорости, выход которого соединен со входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, трех инерциальных датчиков вертикального ускорения, выходы которых соединены со входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, выход которого соединен со входом сумматора, второй вход которого соединен с выходом блока задания опорной высоты, а второй выход модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот со входом дифференциатора.
Для работы устройства задается опорная высота. На вход устройства подается сигнал о запуске системы управления, непрерывно измеряются высоты с помощью локационных высотомеров, вертикальная скорость и вертикальные ускорения, оценивается высота полета, находится разность текущей высоты и опорной, вырабатывается сигнал пропорциональный разности текущей и опорной высоты, сигнал подается на руль высоты.
Недостатком известного устройства является недостаточная эффективность минимизации и точность стабилизации высоты летательного аппарата.
Задачей изобретения является создание способа и устройства, позволяющих формировать траекторию летательного аппарата, проходящую преимущественно над ложбинами неровной поверхности, например, морских волн.
Техническим результатом является минимизация и повышение точности стабилизации средней высоты движения летательного аппарата.
Технический результат достигается тем, что в способе минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, заключающийся в использовании заданного значения истинной геометрической высоты и расстояния до программно-имитируемой «цели», измеряют истинную геометрическую высоту, находят разность между заданной и измеренной истинными геометрическими высотами, формируют и передают управляющий сигнал на руль высоты, нелинейно зависящий от разности этих значений, скорости ее изменения и расстояния до программно-имитируемой «цели» дополнительно перед нахождением разности между заданной и измеренной истинными геометрическими высотами задают желаемое значение путевого угла и максимально допустимого отклонения от него, измеряют текущее значение и скорость изменения путевого угла, определяют разность истинных геометрических высот левой стороны крыла и правой, скорость ее изменения, формируют и передают управляющий сигнал на руль направления, нелинейно зависящий от разности этих значений, скорости ее изменения, разности заданного и текущего значения путевого угла и скорости ее изменения, максимально допустимого отклонения от путевого угла.
Технический результат достигается за счет введения новых существенных отличий (в способе), заключающихся в задании желаемых значений путевого угла максимально и допустимого отклонения от него, измерении его текущего значения и скорости изменения, определении разности истинных геометрических высот левой стороны крыла и правой, формировании и передаче управляющего сигнал на руль направления, нелинейно зависящего от разности этих значений, скорости ее изменения, разности заданного и текущего значения путевого угла и скорости ее изменения, максимально допустимого отклонения от путевого угла, за счет чего траектория прокладывается преимущественно над ложбинами морских волн, что позволяет минимизировать среднюю высоту летательного аппарата и повысить точность ее стабилизации.
Технический результат достигается тем, что устройство для осуществления способа содержащее первый точечный локационный высотомер, выход которого соединен с первым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот , второй и третий точечные локационные высотомеры, вторые выходы которых соответственно соединены с седьмым и шестым входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, доплеровский датчик вертикальной скорости, выход которого соединен со вторым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, первый, второй и третий инерциальные датчики вертикального ускорения, выходы которых соединены соответственно соединены с третьим, четвертым и пятым входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, первый выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом блока задания опорной высоты, а второй выход модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот - со входом первого дифференциатора дополнительно содержит последовательно соединенные блок задания параметров управления, модуль формирования управляющего сигнала на руль высоты, руль высоты, первый вход модуля формирования управляющего сигнала на руль высоты соединен с выходом первого сумматора, а второй вход – с выходом первого дифференциатора, последовательно соединенные второй сумматор, модуль формирования управляющего сигнала на руль направления, руль направления, а также блок задания параметров управления и второй дифференциатор, вход которого соединен со вторым выходом второго сумматор, а выход – с третьим входом модуля формирования управляющего сигнала на руль направления, второй вход которого соединен с выходом блока задания параметров управления, а первые выходы второго точечного локационного высотомера и третьего точечного локационного высотомера соединены соответственно с первым и вторым входами второго сумматора.
Технический результат достигается за счет новых существенных отличий (в устройстве), заключающихся во введении в контур управления локационных высотомеров, доплеровского датчика вертикальной скорости, трех инерциальных датчиков вертикального ускорения, выходы которых соединены с блоком вычисления среднего уровня моря, истинных геометрических и абсолютных высот, рулевого агрегата, непосредственно воздействующего на руль высоты, что позволяет прокладывать траекторию, преимущественно над ложбинами морских волн , минимизировать среднюю высоту летательного аппарата и повысить точность ее стабилизации.
Предлагаемый способ осуществляется следующим образом:
В установленное на приборной доске летательного аппарата устройство задают желаемые значения истинной геометрической высоты hзад, расстояния до программно-имитируемой «цели» Lц, путевого угла γж и максимально допустимого отклонения от него γmax.
На протяжении всего полета измеряют истинные геометрические высоты левой hл стороны крыла и правой hп, находят разность между ними и производную.
По разности высот и производной рассчитывают управляющий сигнал Δψ на руль направления, например, по формуле
 ,
,
где K1 и K2 – коэффициенты, значения которых выбираются в зависимости от аэродинамических характеристик летательного аппарата.
Ограничивают управляющий сигнал Δψ таким образом, чтобы выполнялось условие
где γ – желаемый путевой угол.
Введение данного условия необходимо для того, чтобы ограничить отклонение координат летательного аппарата от кратчайшей траектории.
Формируют и передают управляющий сигнал на руль направления, изменяя путевой угол летательного аппарата.
После подачи сигнала на руль направления летательный аппарат приближается к ложбине морской волны и направлению минимального градиента подстилающей поверхности, а его истинная геометрическая высота увеличивается. Движение в направлении минимального градиента подстилающей поверхности увеличивает точность стабилизации средней высоты полета летательного аппарата.
Вычисляют истинную геометрическую высоту летательного аппарата по формуле
 .
.
h ЛА – высота летательного аппарата, hл – левый точечный локационный высотомер, hп – правый точечный локационный высотомер.
Находят разности между заданной и вычисленной истинными геометрическими высотами, определяют скорости изменения истинной геометрической высоты летательного аппарата h’ЛА и путевого угла γ’ летательного аппарата.
Формируют и передают управляющий сигнал на руль высоты.
Для повышения точности стабилизации летательного аппарата управляющий сигнал Δφ на руль высоты рассчитывают, например, по формулам

h ЛА - текущая высота летательного аппарата, hзад - заданная высота, Θ – угол наклона траектории.
После подачи сигнала на руль высоты истинная геометрическая высота летательного аппарата приближается к заданному значению, а абсолютная высота уменьшается.
Движение в направлении ложбин неровной поверхности, например, морских волн, уменьшает скорость изменения истинной геометрической высоты летательного аппарата, повышая точность стабилизации истинной геометрической высоты летательного аппарата.
Предлагаемый способ наиболее актуален для применения на малых и средних высокоманевренных экранопланах, движущихся вблизи взволнованной морской поверхности.
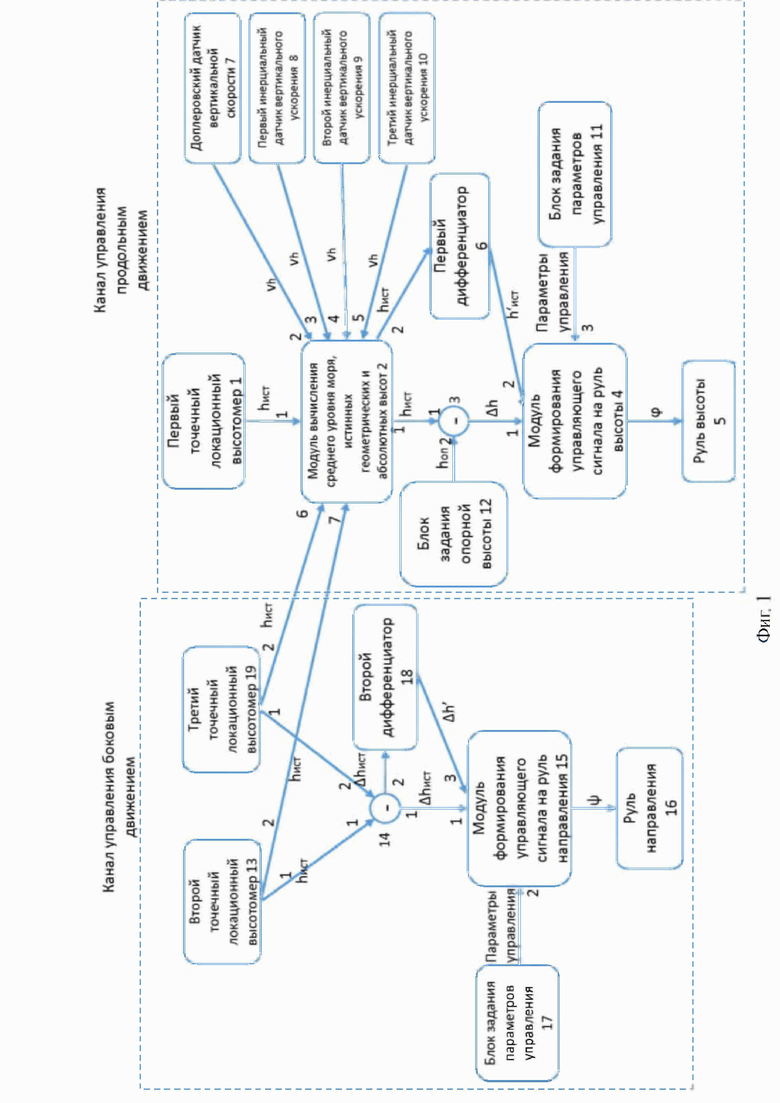
На фиг. 1 представлено устройство для реализации способа минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности и введены следующие обозначения:
1 – первый точечный локационный высотомер;
2 – модуль вычисления среднего уровня моря, истинных геометрических и абсолютных высот;
3 – первый сумматор;
4 – модуль формирования управляющего сигнала на руль высоты;
5 – руль высоты;
6 – первый дифференциатор;
7 – доплеровский датчик вертикальной скорости;
8 – первый инерциальный датчик вертикального ускорения;
9 – второй инерциальный датчик вертикального ускорения;
10 – третий инерциальный датчик вертикального ускорения;
11 – блок задания параметров управления;
12 – блок задания опорной высоты;
13 – второй точечный локационный высотомер;
14 – второй сумматор;
15 – модуль формирования управляющего сигнала на руль направления;
16 – руль направления;
17 – блок задания параметров управления;
18 – второй дифференциатор;
19 – третий точечный локационный высотомер.
Устройство содержит последовательно соединенные первый точечный локационный высотомер 1, модуль вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2, первый сумматор 3, модуль формирования управляющего сигнала на руль высоты 4 и руль высоты 5, второй выход модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2 соединен со входом первого дифференциатора 6, а второй вход модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2 соединен с выходом датчика вертикальной скорости 7, а третий, четвертый и пятый входы модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2 -соединены соответственно с выходами первого инерциального датчика вертикального ускорения 8, второго инерциального датчика вертикального ускорения 9 и третьего инерциального датчика вертикального ускорения 10, выход первого дифференциатора 6 соединен со вторым входом модуля формирования управляющего сигнала на руль высоты 4, третий вход которого соединен с выходом блоком задания параметров управления 11, второй вход первого сумматора 3 соединен с выходом блоком задания опорной высоты 12, последовательно соединенные второй точечный локационный высотомер 13, второй сумматор 14, модуль формирования управляющего сигнала на руль направления 15, руль направления 16, причем второй вход модуля формирования управляющего сигнала на руль направления 15 соединен с выходом блока задания параметров управления 17, третий вход – с выходом второго дифференциатора 18, вход которого соединен со вторым выходом второго сумматора 14, второй выход второго точечного локационного высотомера 13 соединен с седьмым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2, второй выход третьего точечного локационного высотомера 19 соединен с шестым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2, а первый выход – со вторым входом второго сумматор 14.
В качестве точечных локационных высотомеров 1, 13, 19 можно использовать, например, радиовысотомеры непрерывного излучения с частотной модуляцией по пилообразному, синусоидальному или случайному законам. [1]
В качестве сумматоров 3 и 14 могут быть использованы, например, аналоговые сумматоры на операционном усилителе. [2]
В качестве дифференциаторов 6 и 18 могут быть использованы, например, конденсатор, включенный на вход операционного усилителя, в цепь обратной связи которого включен резистор.
В качестве блоков задания параметров управления 11 и 17 можно использовать, например, накопитель на жёстких магнитных дисках. [3]
Модуль вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2 может быть реализован включением в схему, например, аналоговых сумматоров на операционном усилителе и интеграторов, либо с использованием цифровой схемы.
В модуле формирования управляющего сигнала на руль высоты 4 и модуле формирования управляющего сигнала на руль направления 15 нелинейную зависимость управляющего сигнала от разности высот можно реализовать, например, включив в схему пороговое устройство. Пороговое устройство может быть, например, релейным или триггером Шмитта. [4]
Руль высоты 5 представляет собой, например, подвижную управляемую поверхность, отклонение которой в горизонтальном полёте вызывает изменение тангажа через изменение соответствующего момента сил.
Руль направления 16 представляет собой, например, подвижную вертикальную плоскость, крепящуюся к килю.
Устройство работает следующим образом:
Управление движением летательного аппарата можно разделить на два канала: канал управления боковым движением и канал управления продольным движением.
Предварительно пилот запускает устройство нажатием на кнопку запуска, после чего выходной сигнал со второго 13 и третьего 19 точечных локационных высотомеров поступает на первый и второй входы второго сумматора 14 и шестой и седьмой входы модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2, после чего каналы управления боковым и продольным движением начинают работать параллельно. После поступления сигналов на входы второго сумматора 14 выходной сигнал поступает на второй дифференциатор 18 и первый вход модуля формирования управляющего сигнала на руль направления 15, на третий вход которого поступает сигнал с выхода дифференциатора 18, на второй - с блока задачи параметров управления 17; выходной сигнал с модуля формирования управляющего сигнала на руль направления 15 вычисляется, например, по формуле  , после чего поступает на вход руля направления 16. Здесь Kh и Kv – коэффициенты, значения которых выбираются в зависимости от аэродинамических характеристик летательного аппарата. Вычислять управляющий сигнал, подаваемый на руль направления 16 можно полностью или частично заменив аналоговую интегральную схему на цифровую.
, после чего поступает на вход руля направления 16. Здесь Kh и Kv – коэффициенты, значения которых выбираются в зависимости от аэродинамических характеристик летательного аппарата. Вычислять управляющий сигнал, подаваемый на руль направления 16 можно полностью или частично заменив аналоговую интегральную схему на цифровую.
После поступления сигнала от второго 13 и третьего 19 точечных локационных высотомеров на вход блока вычисления среднего уровня моря, истинных геометрических и абсолютных высот 2 на его второй, третий, четвертый и пятый входы поступают сигналы от первого точечного локационного высотомера 1, доплеровского датчика вертикальной скорости 7, первого, второго и третьего инерциальных датчиков вертикального ускорения 8, 9 и 10, соответственно, выходные сигналы поступают на первый вход первого сумматора 3 и первый дифференциатор 6; на второй вход первого сумматора 3 поступает сигнал из блока задания опорной высоты 12, выходной сигнал поступает на первый вход модуля формирования управляющего сигнала на руль высоты 4, на второй вход которого поступает сигнал с выхода первого дифференциатора 6, на третий - с выхода блока задачи параметров управления 11; выходной сигнал модуля формирования управляющего сигнала на руль высоты 4 поступает на руль высоты 5.
По сравнению с прототипом данное изобретение позволяет минимизировать высоту малых и средних высокоманевренных летательных аппаратов, например, экранопланов, до 10%, а также повысить точность стабилизации его высоты движения. Также при движении в условия интенсивного морского волнения данное изобретение повышает безопасность полета за счет прокладки траектории летательного аппарата преимущественно над ложбинами морских волн и снижении частоты касания морской поверхности. Движение летательного аппарата преимущественно над ложбинами морских волн осуществляется за счет прокладки траектории в направлении минимального градиента подстилающей поверхности. Минимальный градиент подстилающей поверхности находится численно, сравнением измерений высот, полученных разнесенными в пространстве точечными локационными высотомерами и изменении путевого угла летательного аппарата в направлении высотомера, показавшего большую высоту.
Дополнительный технический результат заключается в повышении
аэродинамического качества летательного аппарата, например, экраноплана, за счет уменьшения его средней истинной геометрической высоты и увеличения давления под корпусом.
Источники информации, принятые во внимание
1. Небылов А.В. Измерение параметров полета вблизи морской поверхности ГААП. СПб., 1994. 307 с. ISBN 5-230-10-349-3.
2. Аналоговые устройства на операционных усилителях : учебное пособие / В. Г. Важенин, Ю. В. Марков, Л. Л. Лесная ; под общ. ред. В. Г. Важенина. — Екатеринбург : Изд-во Урал. ун-та, 2014. — 107 c. ISBN 978-5-7996-1314-3
3. 2016 Hard Drive Review: Testing 61,590 Hard Drives / Backblaze, May 17, 2016, Andy Klein
Калабеков Б. А. Цифровые устройства и микропроцессорные
4. Системы — М.: Телеком, 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ ПОЛЕТА | 1991 |
|
RU2042200C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2212702C1 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА В СИСТЕМАХ ВТОРИЧНОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047185C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
Изобретение относится к области авиации и может быть использовано в системах управления летательных аппаратов (ЛА). Задают желаемое значение путевого угла и максимально допустимого отклонения от него, измеряют его текущее значение и скорость изменения. Определяют разность истинных геометрических высот левой стороны крыла и правой, скорость ее изменения. Формируют и передают управляющий сигнал на руль направления, нелинейно зависящий от разности этих значений, скорости ее изменения, разности заданного и текущего значения путевого угла и скорости ее изменения, максимально допустимого отклонения от путевого угла. Устройство содержит локационные высотомеры, доплеровский датчик вертикальной скорости, три инерциальных датчика вертикального ускорения, выходы которых соединены с модулем вычисления среднего уровня моря, истинных геометрических и абсолютных высот, рулевого агрегата, непосредственно воздействующего на руль высоты. Изобретение позволяет минимизировать и повысить точность стабилизации средней высоты движения ЛА. 2 н.п. ф-лы, 1 ил.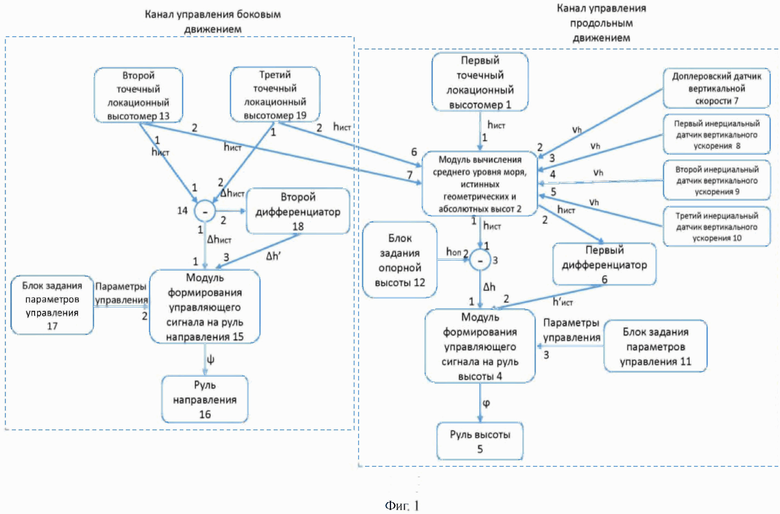
1. Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, заключающийся в использовании заданного значения истинной геометрической высоты и расстояния до программно-имитируемой «цели», измеряют истинную геометрическую высоту, находят разность между заданной и измеренной истинными геометрическими высотами, формируют и передают управляющий сигнал на руль высоты, нелинейно зависящий от разности этих значений, скорости ее изменения и расстояния до программно-имитируемой «цели», отличающийся тем, что перед нахождением разности между заданной и измеренной истинными геометрическими высотами задают желаемое значение путевого угла и максимально допустимого отклонения от него, измеряют текущее значение и скорость изменения путевого угла, определяют разность истинных геометрических высот левой стороны крыла и правой, скорость ее изменения, формируют и передают управляющий сигнал на руль направления, нелинейно зависящий от разности этих значений, скорости ее изменения, разности заданного и текущего значения путевого угла и скорости ее изменения, максимально допустимого отклонения от путевого угла.
2. Устройство для осуществления способа по п. 1, содержащее первый точечный локационный высотомер, выход которого соединен с первым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, второй и третий точечные локационные высотомеры, вторые выходы которых соответственно соединены с седьмым и шестым входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, доплеровский датчик вертикальной скорости, выход которого соединен со вторым входом модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, первый, второй и третий инерциальные датчики вертикального ускорения, выходы которых соответственно соединены с третьим, четвертым и пятым входами модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот, первый выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом блока задания опорной высоты, а второй выход модуля вычисления среднего уровня моря, истинных геометрических и абсолютных высот - со входом первого дифференциатора, отличающееся тем, что устройство дополнительно содержит последовательно соединенные блок задания параметров управления, модуль формирования управляющего сигнала на руль высоты, руль высоты, первый вход модуля формирования управляющего сигнала на руль высоты соединен с выходом первого сумматора, а второй вход - с выходом первого дифференциатора, последовательно соединенные второй сумматор, модуль формирования управляющего сигнала на руль направления, руль направления, а также блок задания параметров управления и второй дифференциатор, вход которого соединен со вторым выходом второго сумматор, а выход - с третьим входом модуля формирования управляющего сигнала на руль направления, второй вход которого соединен с выходом блока задания параметров управления, а первые выходы второго точечного локационного высотомера и третьего точечного локационного высотомера соединены соответственно с первым и вторым входами второго сумматора.
| СПОСОБ СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2015 |
|
RU2588174C1 |
| Способ управления рулём высоты самолёта | 2017 |
|
RU2681509C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕГКОГО ЭКРАНОПЛАНА | 2002 |
|
RU2231104C1 |
| JP 0009101364 A, 15.04.1997 | |||
| 0 |
|
SU193039A1 | |

