Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления продольным движением летательных аппаратов.
Известна система управления продольным движением самолета (Система автоматического управления САУ-23А серия 2. Назначение, принцип действия, законы управления. Техническое описание 6А2.550.045-4ТО (в четырех частях. Часть первая). Редакция I-77) - [1, с.20], реализующая закон управления стабилизатором вида

где  ,
,
T13, T11 - постоянные времени фильтров, p - оператор Лапласа, iϑ, iα, iH, iny - постоянные коэффициенты пропорциональности; µZ(q), µZ1(q) - коэффициенты пропорциональности, изменяющиеся в зависимости от скоростного напора q; ΔH=H-HЗ,
содержащая датчик нормальной перегрузки ny, датчик угловой скорости относительно поперечной оси ωZ, датчик угла атаки α, датчик угла тангажа ϑ, датчик текущего значения высоты H, датчик скоростного напора q и задатчик требуемого значения высоты HЗ, а также фильтры и блоки вычисления коэффициентов пропорциональности.
Недостатком данной системы является невозможность получения одинаковых показателей переходных процессов по высоте в широком диапазоне изменений скоростей и высот в зависимости от режима полета летательного аппарата ввиду коррекции только лишь сигнала по угловой скорости относительно поперечной оси.
Известна система управления продольным движением самолета (Бортовые системы управления полетом. Под ред. Ю.В.Байбородина - М.: Транспорт, 1975) - [2], реализующая закон управления вида
 ,
,
где
ϑЗ - заданное значение угла тангажа
ϑ - текущее значение угла тангажа;
 - модуль текущего значения угла крена;
- модуль текущего значения угла крена;
ωZ - угловая скорость относительно поперечной оси летательного аппарата;
ΔH=H-HЗ;
H - текущее значение высоты полета;
HЗ - заданное значение высоты полета;
 - текущее значение вертикальной скорости;
- текущее значение вертикальной скорости;
 ,
,  ,
,  ,
,  ,
,  ,
,  - передаточные коэффициенты по тангажу, по углу крена в канале тангажа, угловой скорости относительно поперечной оси, высоте, вертикальной скорости и интегралу по высоте соответственно,
- передаточные коэффициенты по тангажу, по углу крена в канале тангажа, угловой скорости относительно поперечной оси, высоте, вертикальной скорости и интегралу по высоте соответственно,
содержащая датчик угловой скорости относительно поперечной оси самолета, выход которого соединен с первым входом первого суммирующего усилителя, гировертикаль, первый выход которой через блок вычисления модуля соединен со вторым входом первого суммирующего усилителя, а второй выход соединен с первым входом первого сумматора, второй, инвертирующий, вход которого соединен с выходом блока формирования заданного значения угла тангажа, выход первого сумматора соединен с третьим входом первого суммирующего усилителя, датчик высоты соединен с первым входом второго сумматора, второй, инвертирующий, вход которого соединен с выходом задатчика высоты, выход которого соединен с первым входом блока формирования заданного значения угла тангажа, второй вход которого соединен с выходом датчика вертикальной скорости, выходом системы управления продольным движением самолета является выход привода руля высоты, вход которого соединен с выходом первого суммирующего усилителя.
Данная система не позволяет получить оптимальные показатели переходных процессов по высоте в широком диапазоне изменений скоростей и высот полета вследствие использования постоянных значений передаточных коэффициентов. Неизменная настройка значений передаточных коэффициентов позволяет обеспечить оптимальные показатели переходных процессов самолета лишь в узком диапазоне скоростей и высот полета, что неприемлемо для современных многорежимных летательных аппаратов.
Техническим результатом, на достижение которого направлено изобретение, является обеспечение оптимальных показателей переходных процессов самолета по высоте во всем эксплуатационном диапазоне изменений скоростей и высот полета.
Технический результат достигается тем, что в систему управления продольным движением самолета, реализующую закон управления вида
,
где
ϑЗ - заданное значение угла тангажа
ϑ - текущее значение угла тангажа;
- модуль текущего значения угла крена;
ωZ - угловая скорость относительно поперечной оси летательного аппарата;
ΔH=H-HЗ;
H - текущее значение высоты полета;
HЗ - заданное значение высоты полета;
- текущее значение вертикальной скорости;
, , , , , - передаточные коэффициенты по тангажу, по углу крена в канале тангажа, угловой скорости относительно поперечной оси, высоте, вертикальной скорости и интегралу по высоте соответственно,
содержащую датчик угловой скорости относительно поперечной оси самолета, выход которого соединен с первым входом первого суммирующего усилителя, гировертикаль, первый выход которой через блок вычисления модуля соединен со вторым входом первого суммирующего усилителя, а второй выход соединен с первым входом первого сумматора, второй, инвертирующий, вход которого соединен с выходом блока формирования заданного значения угла тангажа, выход первого сумматора соединен с третьим входом первого суммирующего усилителя, датчик высоты соединен с первым входом второго сумматора, второй, инвертирующий, вход которого соединен с выходом задатчика высоты, выход которого соединен с первым входом блока формирования заданного значения угла тангажа, второй вход которого соединен с выходом датчика вертикальной скорости, выходом системы управления продольным движением самолета является выход привода руля высоты, вход которого соединен с выходом первого суммирующего усилителя,
дополнительно введены датчик скоростного напора и датчик истинной воздушной скорости, выходы которых соединены соответственно с третьим и четвертым входами блока формирования заданного значения угла тангажа, а блок формирования заданного значения угла тангажа содержит интегратор, вход которого, соединенный с первым входом первого блока умножения, является первым входом блока формирования заданного значения угла тангажа, третий блок умножения, второй вход которого является вторым входом блока формирования заданного значения угла тангажа, а выход соединен с третьим входом третьего сумматора, первый и второй входы которого соединены соответственно с выходами первого блока умножения и второго блока умножения, вычислитель, формирующий в процессе полета передаточные коэффициенты по высоте, вертикальной скорости и интегралу по высоте, обеспечивающие оптимальные переходные процессы самолета по высоте на различных режимах полета в соответствии с минимумом интегрально-квадратичного критерия качества

где τ1, τ2 - весовые коэффициенты, задающие требуемый вид и длительность переходного процесса по высоте,
в соответствии с алгоритмом
где

m - масса самолета;
q - значение скоростного напора;
V - значение истинной воздушной скорости;
S - площадь крыла самолета;
 - производная по углу атаки от коэффициента подъемной силы;
- производная по углу атаки от коэффициента подъемной силы;
a1, a2, a3 - коэффициенты характеристического полинома передаточной функции замкнутой системы по высоте при заданном значении высоты полета HЗ, для случая переходного процесса по высоте с перерегулированием, не превышающим пяти процентов от заданного значения высоты полета НЗ, вычисляются в соответствии с алгоритмом


 ;
;
 ;
;
 ,
,
Δ - положительная константа, назначаемая по соображения конструктивности передаточных чисел;
tp - желаемое время регулирования самолета по высоте,
первый и второй входы которого являются соответственно третьим и четвертым входами блока формирования заданного значения угла тангажа, а первой и второй выходы соединены соответственно с вторыми входами первого блока умножения и второго блока умножения, третий выход вычислителя соединен с первым входом третьего блока умножения, выход интегратора соединен с первым входом второго блока умножения, выходом блока формирования заданного значения угла тангажа является выход третьего сумматора.
Сущность изобретения поясняется на фиг.1-2.
Фиг.1 - блок-схема системы управления полетом самолета, реализующей предложенный способ управления полетом самолета.
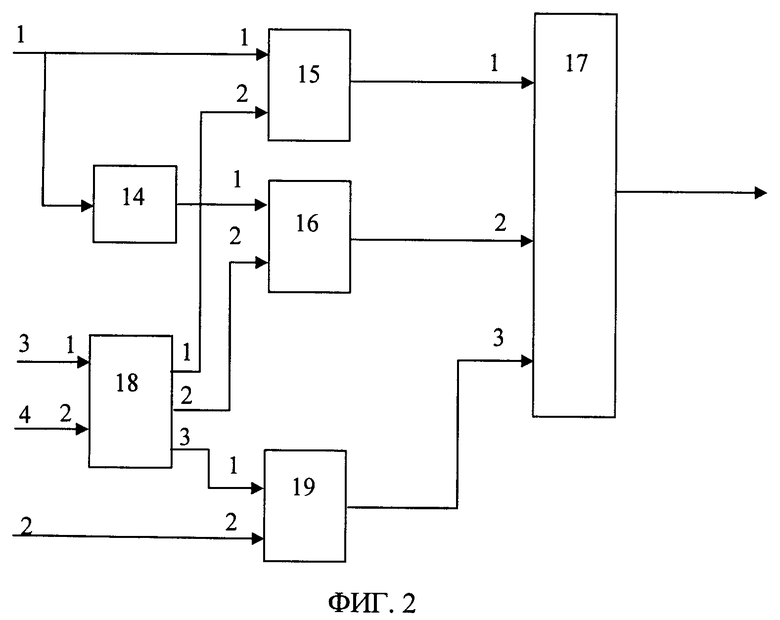
Фиг.2 - блок-схема блока формирования заданного значения угла тангажа.
Система управления полетом самолета содержит
1 - датчик угловой скорости относительно поперечной оси самолета;
2 - гировертикаль;
3 - блок вычисления модуля;
4 - первый сумматор;
5 - первый суммирующий усилитель;
6 - привод руля высоты;
7 - датчик высоты;
8 - задатчик высоты;
9 - второй сумматор;
10 - блок формирования заданного значения угла тангажа;
11 - датчик вертикальной скорости;
12 - датчик скоростного напора;
13 - датчик истинной воздушной скорости.
Приняты следующие обозначения:
ωZ - угловая скорость относительно поперечной оси самолета;
γ - текущее значение угла крена;
ϑ - текущее значение угла тангажа;
H - текущее значение высоты полета;
HЗ - заданное значение высоты полета;
ϑЗ - заданное значение угла тангажа;
ΔH=H-HЗ;
- текущее значение вертикальной скорости;
q - значение скоростного напора;
V - значение истинной воздушной скорости;
δB - угол отклонения руля высоты.
Система управления полетом самолета содержит датчик угловой скорости относительно поперечной оси самолета 1, выход которого соединен с первым входом первого суммирующего усилителя 5, гировертикаль 2, первый выход которой через блок вычисления модуля 3 соединен со вторым входом первого суммирующего усилителя 5, а второй выход соединен с первым входом первого сумматора 4, второй, инвертирующий, вход которого соединен с выходом блока формирования заданного значения угла тангажа 10, выход первого сумматора 4 соединен с третьим входом первого суммирующего усилителя 5, датчик высоты 7 соединен с первым входом второго сумматора 9, второй, инвертирующий, вход которого соединен с выходом задатчика высоты 8, выход которого соединен с первым входом блока формирования заданного значения угла тангажа 10, второй, третий и четвертый входы которого соединены соответственно с выходами датчика вертикальной скорости 11, датчика скоростного напора 12 и датчика истинной воздушной скорости 13, выходом системы управления полетом самолета является выход привода руля высоты 6, вход которого соединен с выходом первого суммирующего усилителя 5.
Блок формирования заданного значения угла тангажа 10 содержит
14 - интегратор;
15 - первый блок умножения;
16 - второй блок умножения;
17 - третий сумматор;
18 - вычислитель;
19 - третий блок умножения.
Блок формирования заданного значения угла тангажа 10 содержит интегратор 14, вход которого, соединенный с первым входом первого блока умножения 15, является первым входом блока формирования заданного значения угла тангажа 10, третий блок умножения 19, второй вход которого является вторым входом блока формирования заданного значения угла тангажа 10, а выход соединен с третьим входом третьего сумматора 17, первый и второй входы которого соединены соответственно с выходами первого блока умножения 15 и второго блока умножения 16, вычислитель 18, первый и второй входы которого являются соответственно третьим и четвертым входами блока формирования заданного значения угла тангажа 10, а первой и второй выходы соединены соответственно со вторыми входами первого блока умножения 15 и второго блока умножения 16, третий выход вычислителя 18 соединен с первым входом третьего блока умножения 19, выход интегратора 14 соединен с первым входом второго блока умножения 16, выходом блока формирования заданного значения угла тангажа 10 является выход третьего сумматора 17.
Работа системы происходит следующим образом. Производят измерение угловой скорости относительно поперечной оси летательного аппарата, угла крена и текущего значения угла тангажа. Для этого с выхода датчика угловой скорости относительно поперечной оси самолета 1 сигнал ωZ поступает на первый вход первого суммирующего усилителя 5. С первого выхода гировертикали 2 сигнал текущего значения угла крена γ поступает на первый вход блока вычисления модуля 3, а затем на второй вход первого суммирующего усилителя 5. Данный сигнал предупреждает потерю высоты вследствие уменьшения вертикальной составляющей подъемной силы самолета при крене самолета. Со второго выхода гировертикали 2 сигнал текущего значения угла тангажа поступает на первый вход первого сумматора 4.
Производят измерение текущей высоты полета и вертикальной скорости. С выхода датчика высоты 7 сигнал текущего значения высоты полета H поступает на первый вход второго сумматора 9, на второй, инвертирующий, вход которого поступает сигнал заданного значения высоты полета HЗ с выхода задатчика высоты 8. На выходе второго сумматора 9 формируется сигнал разности заданного и текущего значения высоты полета ΔH=H-HЗ, который поступает на первый вход блока формирования заданного значения угла тангажа 10. С выхода датчика вертикальной скорости 11 сигнал текущего значения вертикальной скорости поступает на второй вход блока формирования заданного значения угла тангажа 10.
Измеряют скоростной напор и истинную воздушную скорость. С выхода датчика скоростного напора 12 значение скоростного напора q поступает на третий вход блока формирования заданного значения угла тангажа 10. С выхода датчика истинной воздушной скорости 13 значение истинной воздушной скорости V поступает на четвертый вход блока формирования заданного значения угла тангажа 10.
Сигнал заданного значения угла тангажа ϑЗ, формируемый в блоке формирования заданного значения угла тангажа 10, обеспечивает стабилизацию заданной высоты полета в соответствии с алгоритмом:

Для этого, подаваемый на первый вход блока формирования заданного значения угла тангажа 10 сигнал разности заданного и текущего значения высоты полета ΔH=H-HЗ поступает на первый вход первого блока умножения 15, а также на вход интегратора 14, на выходе которого формируется сигнал
 ,
,
поступающий на первый вход второго блока умножения 16. Подаваемый на второй вход блока формирования заданного значения угла тангажа 10 сигнал текущего значения вертикальной скорости поступает на второй вход третьего блока умножения 19. Сигналы скоростного напора q и истинной воздушной скорости V, поступающие на третий и четвертый входы блока формирования заданного значения угла тангажа 10 поступают на первый и второй входы вычислителя 18 соответственно.
Вычислитель 18 производит вычисление передаточных коэффициентов по высоте, вертикальной скорости и интегралу по высоте, обеспечивающих минимум интегрально-квадратичного критерия качества

где τ1, τ2 - весовые коэффициенты, задающие требуемый вид и длительность переходного процесса по высоте.
Работа вычислителя 18 происходит в соответствии с алгоритмом
где
a1, a2, a3 - коэффициенты характеристического полинома передаточной функции замкнутой системы по высоте при управляющем воздействии HЗ, минимизирующие интегрально-квадратичный критерий качества
m - масса самолета;
q - значение скоростного напора;
V - значение истинной воздушной скорости;
S - площадь крыла самолета;
- производная по углу атаки от коэффициента подъемной силы.
Значения скоростного напора и истинной воздушной скорости, изменяющиеся в процессе полета самолета, поступают с соответствующих датчиков. Остальные параметры, входящие в алгоритмы, являются неизменяемыми в процессе полета и заданы заранее.
Задавая весовые коэффициенты τ1, τ2 можно получить переходные процессы по высоте самолета разного вида и длительности. Одним из наиболее распространенных вариантов являются переходные процессы с относительным коэффициентом затухания  . Для этого значения относительного коэффициента затухания переходной процесс самолета по высоте протекает с перерегулированием, не превышающим пяти процентов от заданного значения. Однако используемый интегрально-квадратичный критерий качества позволяет реализовать переходные процессы по высоте и с другими неотрицательными значениями относительного коэффициента затухания в соответствии с задачами пилотирования.
. Для этого значения относительного коэффициента затухания переходной процесс самолета по высоте протекает с перерегулированием, не превышающим пяти процентов от заданного значения. Однако используемый интегрально-квадратичный критерий качества позволяет реализовать переходные процессы по высоте и с другими неотрицательными значениями относительного коэффициента затухания в соответствии с задачами пилотирования.
Меняющиеся в процессе полета значения передаточных коэффициентов по высоте, вертикальной скорости и интегралу по высоте, доставляющие минимум интегрально-квадратичному критерию качества, позволяют обеспечить оптимальные показатели переходных процессов самолета по высоте во всем эксплуатационном диапазоне изменений скоростей и высот полета.
Для случая переходного процесса по высоте с перерегулированием, не превышающим пяти процентов от заданного значения, коэффициенты характеристического полинома передаточной функции замкнутой системы по высоте при заданном значении высоты полета HЗ, минимизирующие интегрально-квадратичный критерий качества, вычисляются в вычислителе 18 в соответствии с алгоритмом
;
;
,
Δ - положительная константа, назначаемая по соображениям конструктивности передаточных чисел.
tp - желаемое время регулирования самолета по высоте.
Найденные значения передаточных коэффициентов по высоте, интегралу по высоте и вертикальной скорости с первого, второго и третьего выхода вычислителя 18 поступают соответственно на второй вход первого блока умножения 15, второй вход второго блока умножения 16 и первый вход третьего блока умножения 19, где происходит их перемножение с соответствующими сигналами. С выходов первого, второго и третьего блоков умножения сигналы поступают на усилитель 17, где происходит их суммирование и формирование сигнала заданного значения угла тангажа.
Выход блока суммирования 17 является выходом блока формирования заданного значения угла тангажа 10.
С выхода блока формирования заданного значения угла тангажа 10 сформированный сигнал поступает на второй, инвертирующий, вход первого сумматора 4, с выхода которого сигнал поступает на третий вход первого суммирующего усилителя 5. Суммирующий усилитель 5 производит суммирование поступающих на его входы сигналов с соответствующими постоянными передаточными коэффициентами по тангажу, по углу крена в канале тангажа и угловой скорости относительно поперечной оси.
Сформированный на выходе первого суммирующего усилителя 5 сигнал управления поступает на привод руля высоты 6, вызывающего непосредственное отклонение руля высоты.
Предлагаемая система обеспечивает оптимальные показатели переходных процессов самолета по высоте во всем эксплуатационном диапазоне изменений скоростей и высот полета. Эффективность предлагаемой системы, реализованной в пилотажно-навигационном комплексе, подтверждена в ходе летных испытаний воздушной мишени, созданной в ОАО «ОКБ «СОКОЛ».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| УСТРОЙСТВО ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕГКОГО ЭКРАНОПЛАНА | 2002 |
|
RU2231104C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ ОДНОКАНАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ ДВИЖЕНИИ ЛЕГКОГО ЭКРАНОПЛАНА | 2000 |
|
RU2180131C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2009 |
|
RU2443602C2 |
Изобретение относится к области приборостроения и может быть использовано для управления продольным движением летательных аппаратов (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата система управления продольным движением самолета содержит датчик угловой скорости относительно поперечной оси самолета, гировертикаль, блок вычисления модуля, суммирующие усилители, блок формирования заданного значения угла тангажа, датчик высоты, задатчик высоты, блок формирования заданного значения угла тангажа и др. При этом система управления продольным движением самолета обеспечивает оптимальные показатели переходных процессов самолета по высоте во всем эксплуатационном диапазоне изменений скоростей и высот полета. Эффективность предлагаемой системы, реализованной в пилотажно-навигационном комплексе, подтверждена в ходе летных испытаний воздушной мишени, созданной в ОАО «ОКБ «СОКОЛ». 1 з.п. ф-лы, 2 ил.
1. Система управления продольным движением самолета, реализующая закон управления вида

где ϑЗ - заданное значение угла тангажа,
ϑ - текущее значение угла тангажа;
|γ| - модуль текущего значения угла крена;
ωZ - угловая скорость относительно поперечной оси летательного аппарата;
ΔH=H-HЗ;
Н - текущее значение высоты полета;
НЗ - заданное значение высоты полета;
- текущее значение вертикальной скорости;
 ,
,  ,
,  ,
,  ,
,  ,
,  - передаточные коэффициенты по тангажу, по углу крена в канале тангажа, угловой скорости относительно поперечной оси, высоте, вертикальной скорости и интегралу по высоте соответственно, содержащая датчик угловой скорости относительно поперечной оси самолета, выход которого соединен с первым входом первого суммирующего усилителя, гировертикаль, первый выход которой через блок вычисления модуля соединен со вторым входом первого суммирующего усилителя, а второй выход соединен с первым входом первого сумматора, второй, инвертирующий, вход которого соединен с выходом блока формирования заданного значения угла тангажа, выход первого сумматора соединен с третьим входом первого суммирующего усилителя, датчик высоты, соединен с первым входом второго сумматора, второй, инвертирующий, вход которого соединен с выходом задатчика высоты, выход которого соединен с первым входом блока формирования заданного значения угла тангажа, второй, входы которого соединен с выходом датчика вертикальной скорости, выходом системы управления продольным движением самолета является выход привода руля высоты, вход которого соединен с выходом первого суммирующего усилителя, отличающаяся тем, что дополнительно введены датчик скоростного напора и датчик истинной воздушной скорости, выходы которых соединены соответственно с третьим и четвертым входами блока формирования заданного значения угла тангажа и блок формирования заданного значения угла тангажа содержит интегратор, вход которого, соединенный с первым входом первого блока умножения, является первым входом блока формирования заданного значения угла тангажа, третий блок умножения, второй вход которого является вторым входом блока формирования заданного значения угла тангажа, а выход соединен с третьим входом третьего сумматора, первый и второй входы которого соединены соответственно с выходами первого блока умножения и второго блока умножения, вычислитель, формирующий в процессе полета передаточные коэффициенты по высоте, вертикальной скорости, и интегралу по высоте, обеспечивающие оптимальные переходные процессы самолета по высоте на различных режимах полета в соответствии с минимумом интегрально-квадратичного критерия качества
- передаточные коэффициенты по тангажу, по углу крена в канале тангажа, угловой скорости относительно поперечной оси, высоте, вертикальной скорости и интегралу по высоте соответственно, содержащая датчик угловой скорости относительно поперечной оси самолета, выход которого соединен с первым входом первого суммирующего усилителя, гировертикаль, первый выход которой через блок вычисления модуля соединен со вторым входом первого суммирующего усилителя, а второй выход соединен с первым входом первого сумматора, второй, инвертирующий, вход которого соединен с выходом блока формирования заданного значения угла тангажа, выход первого сумматора соединен с третьим входом первого суммирующего усилителя, датчик высоты, соединен с первым входом второго сумматора, второй, инвертирующий, вход которого соединен с выходом задатчика высоты, выход которого соединен с первым входом блока формирования заданного значения угла тангажа, второй, входы которого соединен с выходом датчика вертикальной скорости, выходом системы управления продольным движением самолета является выход привода руля высоты, вход которого соединен с выходом первого суммирующего усилителя, отличающаяся тем, что дополнительно введены датчик скоростного напора и датчик истинной воздушной скорости, выходы которых соединены соответственно с третьим и четвертым входами блока формирования заданного значения угла тангажа и блок формирования заданного значения угла тангажа содержит интегратор, вход которого, соединенный с первым входом первого блока умножения, является первым входом блока формирования заданного значения угла тангажа, третий блок умножения, второй вход которого является вторым входом блока формирования заданного значения угла тангажа, а выход соединен с третьим входом третьего сумматора, первый и второй входы которого соединены соответственно с выходами первого блока умножения и второго блока умножения, вычислитель, формирующий в процессе полета передаточные коэффициенты по высоте, вертикальной скорости, и интегралу по высоте, обеспечивающие оптимальные переходные процессы самолета по высоте на различных режимах полета в соответствии с минимумом интегрально-квадратичного критерия качества
где τ1, τ2 - весовые коэффициенты, задающие требуемый вид и длительность переходного процесса по высоте,
в соответствии с алгоритмом
;
;
,
где 
m - масса самолета;
q - значение скоростного напора;
V - значение истинной воздушной скорости;
S - площадь крыла самолета;
- производная по углу атаки от коэффициента подъемной силы;
a1, а2 и а3 - коэффициенты характеристического полинома передаточной функции замкнутой системы по высоте при заданном значении высоты полета НЗ,
первый и второй входы которого являются соответственно третьим и четвертым входами блока формирования заданного значения угла тангажа, а первой и второй выходы соединены соответственно с вторыми входами первого блока умножения и второго блока умножения, третий выход вычислителя соединен с первым входом третьего блока умножения, выход интегратора соединен с первым входом второго блока умножения, выходом блока формирования заданного значения угла тангажа является выход третьего сумматора.
2. Система управления продольным движением самолета по п.1, отличающаяся тем, что вычислитель блока формирования заданного значения угла тангажа для случая переходного процесса по высоте с перерегулированием, не превышающим пяти процентов от заданного значения высоты полета НЗ, коэффициенты характеристического полинома передаточной функции замкнутой системы по высоте при заданного значения высоты полета НЗ формирует в соответствии с алгоритмом
 ;
;
;
;
;
 ,
,
Δ - положительная константа, назначаемая по соображениям конструктивности передаточных чисел;
tp - желаемое время регулирования самолета по высоте.
| Бортовые системы управления полетом | |||
| /Под ред | |||
| Ю.В.Байбородина | |||
| - М.: Транспорт, 1975, с.236 | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Назначение, принцип действия, законы управления | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Часть первая) | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Способ оптимального регулирования скорости горизонтального полета воздушного судна | 1991 |
|
SU1797586A3 |
| АТАНС М., ФАЛБ П | |||
| Оптимальное управление | |||
| - М.: Машиностроение, 1968 | |||
| Самоцентрирующийся лабиринтовый сальник | 1925 |
|
SU423A1 |
| Вычислитель угла атаки | 1982 |
|
SU1072069A1 |

