Изобретение относится к системам автоматического управления летательными аппаратами (ЛА), как пилотируемыми, так и беспилотными.
Известны устройство и метод для измерения воздушной скорости и угла атаки (US 5299455, 73/180, 05.04.94). Представленное устройство для измерения воздушной скорости и угла атаки установлено на выносной штанге в носовой части ЛА. В качестве преобразователей используются анемометрические датчики, размещенные на крестообразных цилиндрах. Сопротивление датчиков зависит от степени их обдува. На относительно небольших скоростях 500 км/ч изменение сопротивления датчиков пропорционально скорости обдува (скорости ЛА). На больших скоростях начинается аэродинамический нагрев поверхностей, где размещены датчики, и зависимость между скоростью и сопротивлением датчиков меняется. Кроме того, при скольжении ЛА меняется вектор скорости и, соответственно, сопротивление датчиков, что делает метод ограниченно пригодным, особенно на режимах сваливания и штопора.
Известен автомат определения и индикации углов атаки и перегрузок АУАСП-Р, включающий в себя датчик углов атаки, выход которого соединен с первым входом следящей системы, второй вход которого соединен с элементом отработки (потенциометром обратной связи) индикатора углов атаки, а выход с двигателем-редуктором, расположенным также в индикаторе.
Это устройство обеспечивает экипаж информацией о текущем значении угла атаки с момента включения автомата.
Однако здесь имеются существенные недостатки, заключающиеся в следующем.
1. Любой отказ в цепи вычисления угла атаки приводит или к потере информации о текущих значениях угла атаки, или к выдаче недостаточной информации без какой-либо сигнализации об этом экипажу.
2. Информация, предоставляемая экипажу, недостоверна из-за неучета влияния на местные потоки, в которых устанавливается чувствительный элемент датчика углов атаки, других параметров полета, среди которых основное влияние оказывает угол скольжения самолета.
Известно также устройство определения индикации и сигнализации углов атаки и перегрузок УДУА-6, содержащее два датчика угла атаки, которые для последующей компенсации влияния угла скольжения на местный угол атаки, устанавливаются на противоположных бортах (левом и правом) самолета, усредняющее устройство, вычислитель истинного угла атаки и блок контроля, причем выход левого датчика угла атаки одновременно подключен к первым входам блока контроля и усредняющего устройства, выход правого датчика угла атаки одновременно подключен к вторым входам блока контроля и усредняющего устройства, выход усредняющего устройства подключен к входу вычислителя истинного угла атаки, а с выходов вычислителя истинного угла атаки и блока контроля информация (истинный угол атаки и сигнализация исправности канала формирования угла атаки соответственно) выдается соответствующему потребителю (для целей индикации, сигнализации, САУ и т.д.).
Данное устройство формирует сигнал истинного угла атаки по следующей зависимости:  - среднее значение местного угла атаки.
- среднее значение местного угла атаки.
Kα коэффициент перехода от местных углов атаки к истинным; αo истинный угол атаки при нулевом значении местного угла атаки; αмест.лев, αмест.прав сигналы местного угла атаки, снимаемые с левого и правого датчиков соответственно.
Сигнал исправности канала угла атаки формируется в блоке контроля и выдается в случае превышения абсолютной разности значений левого и правого углов атаки определенной, заранее заданной и уточненной по результатам летных испытаний величины.
Данное устройство свободно от второго недостатка, отмеченного для аналога, однако в нем продолжает присутствовать первый, что существенно снижает безопасность пилотирования.
Известны способы формирования резервированных систем автоматического управления [1].
Для реализации известных способов резервирования применяют двухкратное резервирование датчика угла атаки в четырехкратно резервированной системе дистанционного управления. Датчики располагаются на правом и левом бортах. При выполнении интенсивных маневров либо один, либо другой датчик находятся в затенении.
Недостатком использования существующего метода является тот факт, что для определения неисправного источника информации необходимо иметь, как минимум, три источника информации. В связи с этим крайне актуальной становится задача косвенного определения координат ЛА для повышения надежности работы систем дистанционного управления (СДУ).
Известен способ измерения угла атаки путем размещения на обтекателе приемников воздушного давления в количестве трех штук, но для этого требуется точно задавать модель обтекания. Наличие несовпадения расчетной модели обтекания с реальным физическим процессом приводит к ухудшению точности измерения углов атаки и существенно ограничивает диапазон измерений [2].
Известно устройство для определения угла атаки самолета по патенту [3], содержащее последовательно соединенные первый датчик угла атаки и первый блок формирования истинного значения угла атаки, второй датчик угла атаки, усредняющее устройство и блок контроля, отличающееся тем, что с целью повышения безопасности полета путем резервирования и контроля датчиков угла атаки, в него дополнительно введены второй блок формирования истинного значения угла атаки, вход которого соединен с выходом второго датчика угла атаки, блок коммутации, первый, второй и третий выходы которого соединены с первым, вторым и третьим входами усредняющего устройства, выход которого является выходом устройства для определения угла атаки, последовательно соединенные датчик веса, масштабный усилитель, первый блок деления, блок умножения, первый сумматор и второй блок деления, выходы первого и второго блоков формирования сигналов истинного значения угла атаки и второго блока деления соединены соответственно с первым, вторым и третьим входами блока контроля и блока коммутации, четвертый вход блока контроля соединен с выходом усредняющего устройства, первый, второй, третий и четвертый выходы блока контроля соединены с четвертым, пятым, шестым и седьмым входами блока коммутации, датчик скоростного напора, выход которого соединен с вторым входом первого блока деления, и датчик нормальной перегрузки, выход которого соединен с вторым входом блока умножения, последовательно соединенные задатчик начальных значений коэффициента подъемной силы, второй сумматор и первый коммутатор, выход которого соединен с вторым инверсным входом первого сумматора, третий сумматор, выход которого соединен с вторым входом первого коммутатора, а первый вход с вторым выходом задатчика начальных значений коэффициента подъемной силы, датчик текущего положения закрылков, выход которого соединен с вторыми входами второго и третьего сумматоров соответственно, и датчик состояния шасси, выход которого соединен с управляющим входом первого коммутатора, второй коммутатор, выход которого соединен с вторым входом второго блока деления, четвертый сумматор и компаратор, задатчик начального значения крутизны наклона характеристики подъемной силы в функции угла атаки, выход которого соединен соответственно с первыми входами второго коммутатора и четвертого сумматора, датчик числа Маха, выход которого соединен соответственно с вторым входом четвертого сумматора, выход которого соединен с вторым входом второго коммутатора, и первым входом компаратора, выход которого соединен с управляющим входом второго коммутатора, задатчик порогового значения числа Маха, выход которого соединен с третьим инверсным входом четвертого сумматора и вторым входом компаратора соответственно.
Недостатком этого устройства является то, что метод определения угла атаки с достаточной степенью точности подходит для целей систем предупреждения, применяемых на неманевренных тяжелых самолетах.
Для реализации известных способов управления ЛА могут применяться методы модального управления, основанные на выборе полюсов передаточной функции замкнутой системы или корней ее характеристического уравнения. Если все составляющие вектора состояния объекта могут быть измерены и модель динамики объекта линейна, то обеспечение заданного расположения корней замкнутой системы не вызывает трудности. Требуемое расположение корней характеристического уравнения для каждого объекта определяется в отдельности [4].
Технический результат от прилагаемого изобретения заключается в повышении безопасности полета путем улучшения характеристик управления ЛА с помощью построения алгоритма синтеза управления ЛА и решения задачи резервирования и контроля датчика угла атаки.
Технический результат достигается, во-первых, построением желаемой модели движения ЛА в продольной плоскости на основании критерия Шомбера-Гертсена, который подразумевает разделение на два типа управления самолетом на тангажное и перегрузочное, за границу принято значение
 ед.g/рад (
ед.g/рад ( - частная производная нормальной перегрузки по углу атаки) [5].
- частная производная нормальной перегрузки по углу атаки) [5].
Для получения процессов в контуре управления близких к апериодическим на основании критерия Шомбера-Гертсена можно сформировать требования к желаемым значениям параметров объекта  и
и  ( - производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки, - производная приведенного к моменту инерции относительно связанной оси Oz момента тангажа по углу атаки). При
( - производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки, - производная приведенного к моменту инерции относительно связанной оси Oz момента тангажа по углу атаки). При  удается получить корни характеристического многочлена системы с большими отрицательными вещественными частями, тем самым выполнить требования к апериодичности переходных процессов в контуре «летчик-система автоматического управления». При этом соотношение может меняться на ±30%, важно, чтобы это соотношение не выходило за область, удовлетворяющую критерию. На основании этого соотношения формируются линейные дифференциальные уравнения желаемой системы. Во-вторых, косвенная оценка угла атаки может быть определена благодаря наличию информации о величине и данных о воздушной скорости, которая может быть измерена современными системами воздушных сигналов (СВС) с точностью до 10%.
удается получить корни характеристического многочлена системы с большими отрицательными вещественными частями, тем самым выполнить требования к апериодичности переходных процессов в контуре «летчик-система автоматического управления». При этом соотношение может меняться на ±30%, важно, чтобы это соотношение не выходило за область, удовлетворяющую критерию. На основании этого соотношения формируются линейные дифференциальные уравнения желаемой системы. Во-вторых, косвенная оценка угла атаки может быть определена благодаря наличию информации о величине и данных о воздушной скорости, которая может быть измерена современными системами воздушных сигналов (СВС) с точностью до 10%.
Задача определения оценки истинного угла атаки становится актуальной особенно в тех случаях, когда необходимо обеспечивать работу ограничителя предельных режимов (ОПР), учитывающего в своем алгоритме ограничение по углу атаки, и обеспечить управление механизацией крыла (носки, переднее горизонтальное оперение).
Для обеспечения заявленного технического результата необходимо решить задачу резервирования датчика угла атаки в модальной системе с астатическим законом управления по невязке.
Пусть с помощью модального управления и астатического закона управления по невязке ЛА приобрел свойства желаемой линейной модели. В этом случае приращение вертикальной перегрузки линейно связано с приращением угла атаки:

где: ny - нормальная перегрузка;
α - угол атаки;
 - нормальная перегрузка в зависимости от угла атаки.
- нормальная перегрузка в зависимости от угла атаки.
В свою очередь 
где: V - воздушная скорость;
q - скоростной напор;
 - производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки (коэффициент подъемной силы).
- производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки (коэффициент подъемной силы).
Таким образом, измеряя перегрузки ЛА, а также получая данные о текущей величине воздушной скорости из системы воздушных сигналов, можно оценить величину угла атаки:

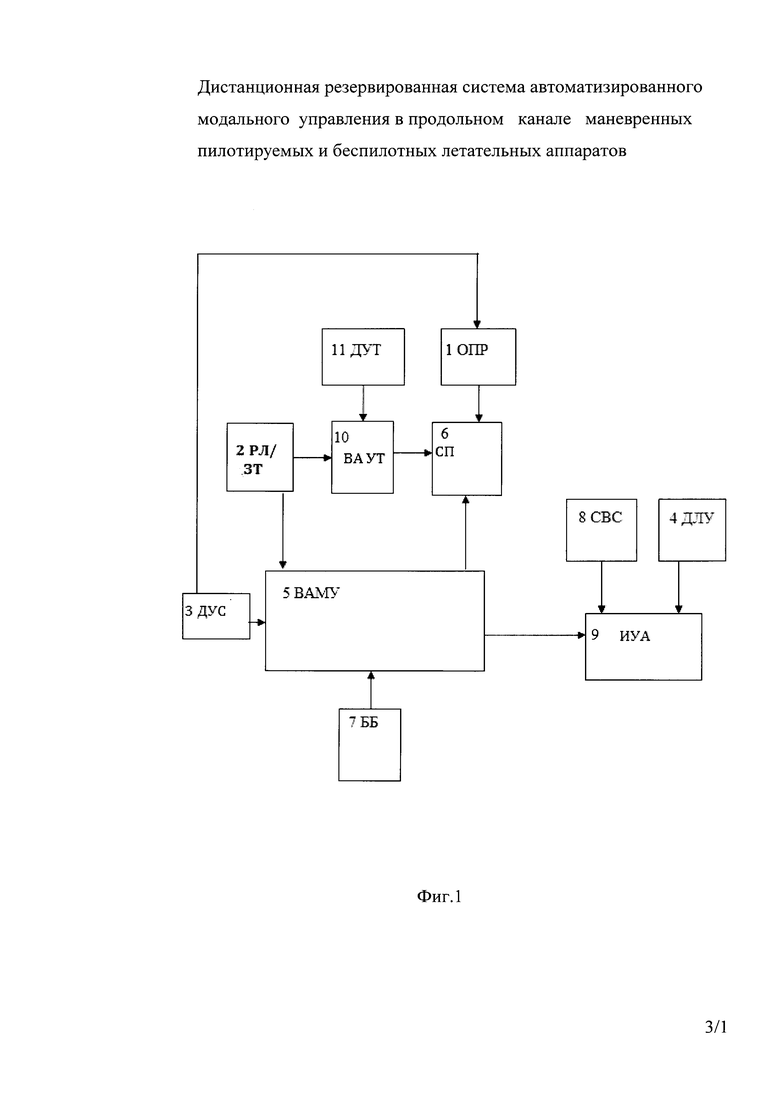
На фигуре 1 представлена структурная схема дистанционной резервированной системы автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов (ДРСАМУ):
ограничитель предельных режимов (ОПР) 1, состоящий из задатчика максимального угла атаки, вычислителя автомата ограничения угла атаки и
ручка летчика / задатчик тангажа (РЛ/ЗТ) 2;
датчик угловых скоростей (ДУС), имеющий в своем составе датчик угловой скорости тангажа 3;
датчик линейных ускорений (ДЛУ) 4;
вычислитель алгоритма модального управления (ВАМУ) 5;
сервопривод, включающий гидравлический привод и селектор минимального сигнала 6;
блок балансировки 7;
система воздушных сигналов СВС 8;
идентификатор угла атаки (ИУА) 9;
вычислитель автопилота угла тангажа (ВАУТ) 10;
датчик угла тангажа (ДУТ) 11.
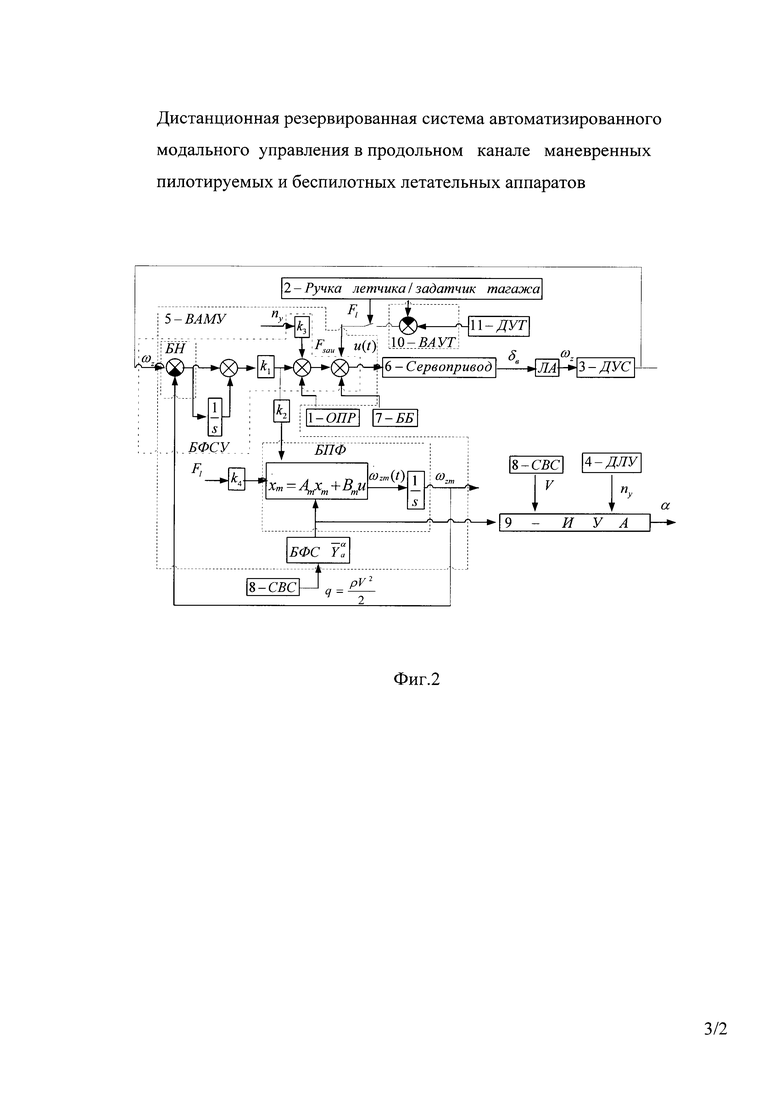
На фигуре 2 представлена функциональная схема ДРСАМУ, где:
1 - ОПР - ограничитель предельных режимов;
2 - ручка летчика / задатчик тангажа;
3 - ДУС - датчик угловых скоростей (ωz);
4 - ДЛУ - датчик линейных ускорений;
5 - ВАМУ - вычислитель алгоритма модального управления, в состав которого входят блоки:
БФС - блок формирования сигнала управления  ;
;
БПФ - блок передаточной функции;
БН - блок невязки;
БФСУ - блок формирования сигнала управления (u);
6 - СП - сервопривод;
7 - ББ - блок балансировки;
8 - СВС - система воздушных сигналов;
9 - ИУА - идентификатор угла атаки;
10 - ВАУТ - вычислитель автопилота угла тангажа;
11 - ДУТ - датчик угла тангажа;
ЛА - летательный аппарат;
xm - вектор состояния модели, Am - (n×n) и Bm - (n×1) - матрицы известных параметров желаемой модели, ny - нормальная перегрузка, q - скоростной напор, F1 - сигнал с ручки летчика/задатчика тангажа, ωz - выходной сигнал с датчика угловой скорости тангажа ЛА, ωzm - выходной сигнал с желаемой эталонной модели, ki - масштабные коэффициенты закона управления, V - воздушная скорость, ЛА - летательный аппарат, α - угол атаки, u - сигнал управление, реализованный по правилу:

где: Fl - сигнал с ручки пилота,
ki - масштабные коэффициенты закона управления,
ωz - выходной сигнал датчика угловой скорости тангажа ЛА,
ωzm - выходной сигнал с желаемой эталонной модели,
ny - нормальная перегрузка.
Дистанционная резервированная система автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов (ДРСАМУ), содержащая последовательно соединенные ручку пилота/задатчик тангажа и вычислитель автопилота угла тангажа, гидравлический привод и селектор минимального сигнала в составе сервопривода, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла тангажа, ограничитель предельных режимов (ОПР), состоящий из последовательно соединенных задатчика максимального угла атаки, вычислителя автомата ограничения угла атаки, выход которого подключен к входу сервопривода, датчик угловой скорости тангажа (ДУС) летательного аппарата, имеющий выход, подключенный к входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен ко второму входу селектора минимального сигнала, а также блок балансировки. В состав ДРСАМУ включен вычислитель алгоритма модального управления (ВАМУ), содержащий блок, формирующий сигнал управления на основании данных об угловых скоростях тангажа, получаемые от датчика угловой скорости ЛА и из желаемой эталонной модели, параметры которой настраиваются программным блоком формирования  в соответствии с критерием Шомбера-Гертсена в зависимости от величины скоростного напора от СВС.
в соответствии с критерием Шомбера-Гертсена в зависимости от величины скоростного напора от СВС.
С целью обеспечения заданного качества управления во всей области применения ЛА при изменении аэродинамических и массо-инерционных характеристик в ВАМУ включен блок формирования сигнала усредненного приведенного коэффициента подъемной силы  в зависимости от условий полета по высоте и скорости полета, программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки (Δωz), на первый вход которого подключен сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода стабилизатора, а также на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика. Кроме того, в систему управления дополнительно введен последовательно соединенный идентификатор угла атаки, на первый вход которого подается сигнал СВС по сигналу воздушной скорости (V), на второй - сигнал ДЛУ по нормальной перегрузке, а третий вход соединен с выходом блока формирования
в зависимости от условий полета по высоте и скорости полета, программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки (Δωz), на первый вход которого подключен сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода стабилизатора, а также на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика. Кроме того, в систему управления дополнительно введен последовательно соединенный идентификатор угла атаки, на первый вход которого подается сигнал СВС по сигналу воздушной скорости (V), на второй - сигнал ДЛУ по нормальной перегрузке, а третий вход соединен с выходом блока формирования  , при этом значение угла атаки дополнительно может определяться по правилу:
, при этом значение угла атаки дополнительно может определяться по правилу:

Литература
1. Оболенский Ю.Г. Управление полетом маневренных самолетов. Москва. Филиал Воениздат, 2007 г., с. 399.
2. К.С. Жуков. Реализация аэродинамического измерителя углов атаки и скольжения для беспилотного летательного аппарата. // ISSN 2305-5626. Вестник МГТУ им. Н.Э. Баумана: электронное издание. 2013.
3. Патент RU 2041136. Устройство для определения угла атаки самолета. Андрианов А.П., Балагуров С.Ф. и др. МПК В64С 13/18, опубл. 09.08.1995.
4. Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 101, рис. 3.9; 2. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр. 179, рис. 5.2; 3. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 192, рис. 14.2, стр. 194, рис. 14.4, стр. 198, рис. 14.7, стр. 201, рис. 14.9.
5. Shomber Н., Gertsen W. «Longitudinal Handing Qualities Griteria: an Evaluation» AIAA Paptr, N65-780, 1965 y.
Дистанционная резервированная система автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов содержит ручку пилота/задатчик тангажа, вычислитель автопилота угла тангажа, сервопривод, датчик угла тангажа, ограничитель предельных режимов, датчик угловой скорости тангажа, блок балансировки, вычислитель алгоритма модального управления (ВАМУ), систему воздушных сигналов, датчик линейных ускорений, идентификатор угла атаки, соединенные определенным образом. Сервопривод содержит гидропривод и селектор минимального сигнала. Ограничитель предельных режимов содержит задатчик максимального угла атаки и вычислитель автомата ограничения угла атаки. ВАМУ содержит блок формирования сигнала усредненного приведенного коэффициента подъемной силы, программный блок передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа, блок формирования сигнала управления. Обеспечивается повышение безопасности полета путем улучшения характеристик управления. 2 ил.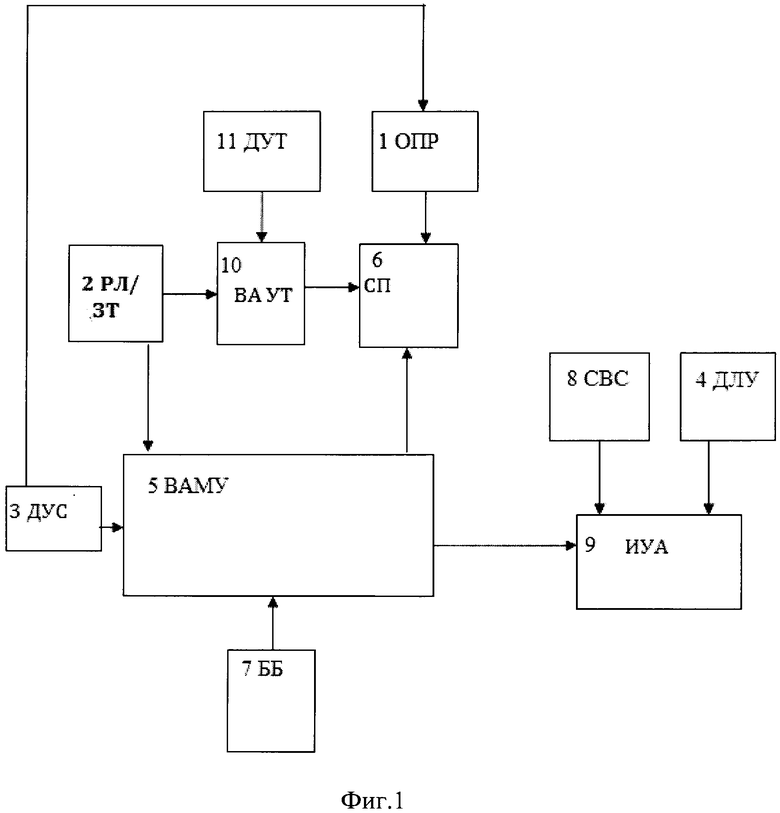
Дистанционная резервированная система автоматизированного модального управления (ДРСАМУ)) в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов (ЛА), содержащая последовательно соединенные ручку пилота/задатчик тангажа и вычислитель автопилота угла тангажа, гидравлический привод и селектор минимального сигнала в составе сервопривода, выходной сигнал которого определяет угол отклонения руля высоты летательного аппарата, датчик угла тангажа летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла тангажа, ограничитель предельных режимов (ОПР), состоящий из последовательно соединенных задатчика максимального угла атаки, вычислителя автомата ограничения угла атаки, выход которого подключен к входу сервопривода, датчик угловой скорости тангажа (ДУС) летательного аппарата, имеющий выход, подключенный к входу вычислителя автомата ограничения угла атаки, выход вычислителя автопилота угла тангажа подключен ко второму входу селектора минимального сигнала, а также блок балансировки, отличается тем, что дополнительно введен вычислитель алгоритма модального управления (ВАМУ), содержащий блок формирования сигнала усредненного приведенного коэффициента подъемной силы  , программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), на первый вход которого поступает сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика/задатчика тангажа, кроме того, в ВАМУ входит блок формирования сигнала управления (u) по правилу:
, программный блок оптимальной по критерию Шомбера-Гертсена передаточной функции системы по сигналу угловой скорости тангажа, блок невязки по угловой скорости тангажа (Δωz), на первый вход которого поступает сигнал с выхода датчика угловой скорости тангажа (ωz), на второй вход - сигнал угловой скорости тангажа с выхода блока передаточной функции (ωzm), при этом сумма масштабированных астатического сигнала (Δωz/p) и сигнала невязки (Δωz) с выхода блока невязки поступает на вход сервопривода и на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика/задатчика тангажа, кроме того, в ВАМУ входит блок формирования сигнала управления (u) по правилу:

где Fl - сигнал с ручки пилота,
ki - масштабные коэффициенты закона управления,
ωz - выходной сигнал датчика угловая скорость тангажа ЛА,
ωzm - выходной сигнал с желаемой эталонной модели,
ny - нормальная перегрузка, идентификатор угла атаки (ИУА), на первый вход которого подается сигнал воздушной скорости (V) от системы воздушных сигналов (СВС), на второй - сигнал с датчика линейных ускорений (ДЛУ) по нормальной перегрузке, а третий вход соединен с выходом блока формирования  , при этом значение угла атаки дополнительно определяется по правилу:
, при этом значение угла атаки дополнительно определяется по правилу:

где α - угол атаки;
ny - нормальная перегрузка;
V - воздушная скорость;
q - скоростной напор;
 - коэффициента подъемной силы.
- коэффициента подъемной силы.
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТОМ | 2011 |
|
RU2482022C1 |
| US 7693624 B2, 06.04.2010 | |||
| US 6915989 B2, 12.07.2005. | |||

