Область техники
Изобретение относится к частотно регулируемым электроприводам и, в частности, к управлению преобразователями частоты, содержащими звено постоянного тока и инвертор напряжения с широтно-импульсной модуляцией (ШИМ). Выходные параметры (частота и напряжение) таких преобразователей определяются параметрами основной гармоники ШИМ-напряжения, формируемого на выходе инвертора [1].
Уровень техники
Частотное регулирование дает электроприводу ряд важных преимуществ, среди которых главным является экономия электроэнергии. Вместе с тем статистика показывает увеличение числа аварийных отключений оборудования (например, котлов на предприятиях теплоснабжения), технологические механизмы которого (например, сетевые насосы, транспортирующие воду через котел в системе теплоснабжения, или дутьевые вентиляторы на горелках котла) оснащены частотно-регулируемым приводом переменного тока. Причиной этого является увеличение длительности перерывов в работе электродвигателей, питаемых от преобразователей частоты, при кратковременных (1-2 с) нарушениях электроснабжения [2].
Для сокращения длительности таких перерывов наряду с рабочими режимами управления преобразователем предусматриваются специальные режимы управления при кратковременных нарушениях электроснабжения.
Известен способ управления преобразователем частоты, согласно которому при нарушении электроснабжения (пропадании или снижении питающего напряжения ниже заданного уровня) прерывают рабочий режим управления и снижают с ограниченной скоростью выходную частоту, а при возобновлении электропитания повышают ее и восстанавливают рабочий режим управления [3]. Преобразователь, управляемый по этому способу, при кратковременных нарушениях электроснабжения поддерживает на заданном уровне напряжение звена постоянного тока за счет рекуперации энергии инерционного вращения электродвигателя и сопряженного с ним механизма. Такой способ управления при нарушениях электроснабжения характерен для большинства представленных на российском рынке преобразователей частоты и выбран в качестве прототипа.
Недостаток известного способа состоит в следующем.
Следствием снижения выходной частоты преобразователя, которое предусматривается известным способом, является приложение тормозного момента к ротору электродвигателя. Поэтому электродвигатель и приводимый технологический механизм, продолжающие инерционное вращение (с постепенной потерей производительности), ускоренно замедляют вращение и при восстановлении электроснабжения начинают разгон с меньшей скорости. В результате время разгона механизма до требуемой скорости вращения увеличивается и, соответственно, увеличивается длительность перерыва в нормальной работе механизма. Кроме того, следствием ускоренного замедления вращения приводимого механизма является повышение вероятности срабатывания технологической защиты оборудования при кратковременных нарушениях электроснабжения.
Сущность изобретения
Задача изобретения состоит в том, чтобы при нарушениях электроснабжения погасить энергию магнитного поля электродвигателя, рекуперируя ее в звено постоянного тока, и тем самым подготовить электродвигатель к последующему пуску, но при этом по возможности сохранить энергию инерционного вращения электродвигателя и механизма, не прикладывая к ним тормозного момента.
Технический результат изобретения проявляется при кратковременных нарушениях электроснабжения и состоит в улучшении начальных условий разгона электродвигателя преобразователем частоты и в замедлении падения скорости вращения приводимого технологического механизма.
Указанный результат достигается способом управления, который заключается в том, что фиксируют нарушение электроснабжения преобразователя, прерывают рабочий режим управления, сохраняют выходную частоту, снижают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне напряжение звена постоянного тока, и запирают инвертор, а после восстановления электроснабжения включают инвертор, повышают выходное напряжение и возобновляют рабочий режим управления.
Изобретение имеет развития и уточнения для частных случаев его реализации, которые состоят в том, что:
- момент запирания инвертора устанавливают путем отсчета заданной задержки от момента снижения выходного напряжения до заданной величины или от момента фиксации нарушения электроснабжения;
- после восстановления электроснабжения выходную частоту устанавливают равной или пропорциональной ее сохраненному значению или в соответствии с фактической частотой вращения электродвигателя, питаемого преобразователем;
- после восстановления электроснабжения повышают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне пусковой ток электродвигателя, питаемого преобразователем.
Краткое описание фигур
На фиг.1 и фиг.2 приведены диаграммы, иллюстрирующие предлагаемый способ и способ-прототип соответственно. На фиг.3 приведена блок-схема, иллюстрирующая пример осуществления предлагаемого способа с учетом его развития и уточнений.
Осуществление изобретения
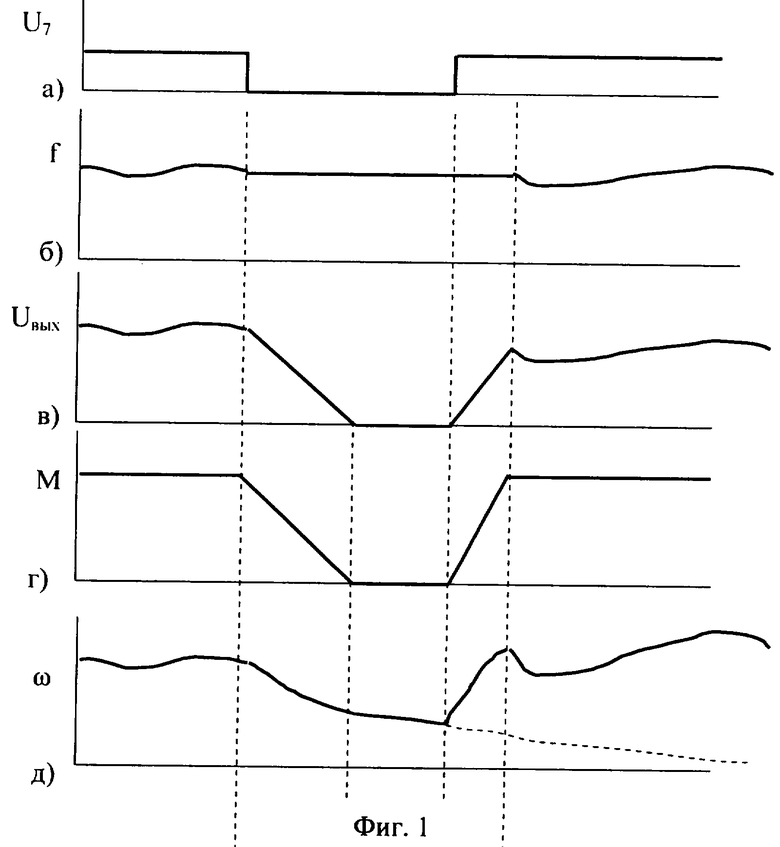
На фиг.1, иллюстрирующей предлагаемый способ, показаны:
а) выходной сигнал датчика наличия электроснабжения, обнаруживающего провалы и перерывы электропитания;
б-д) графики изменения выходной частоты преобразователя, выходного напряжения преобразователя, момента и скорости вращения электродвигателя соответственно.
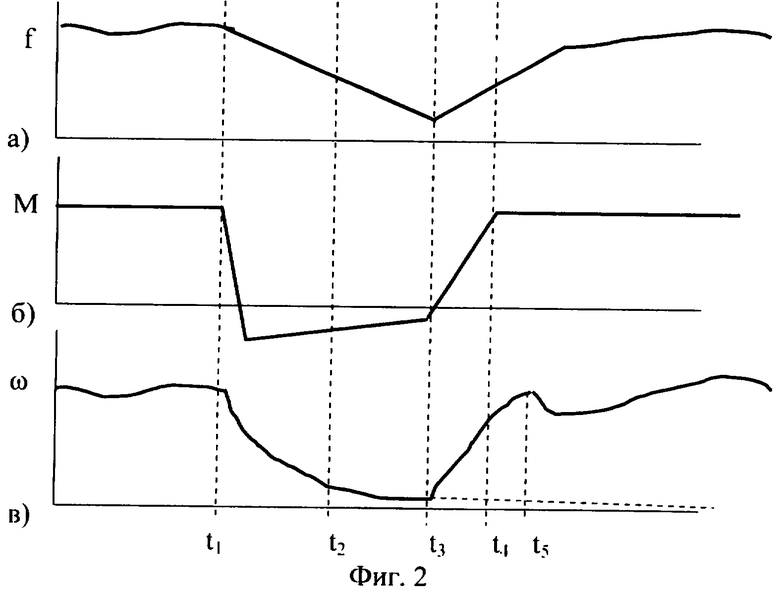
На фиг.2, иллюстрирующей способ-прототип, показаны:
а-в) графики изменения выходной частоты преобразователя, момента и скорости вращения электродвигателя соответственно.
На блок-схеме фиг.3 показаны:
- насос 1, приводимый во вращение электродвигателем 2;
- преобразователь частоты, включающий звено постоянного тока 3 (состоящее из выпрямителя и сглаживающего LC-фильтра), и инвертор 4 напряжения с широтно-импульсной модуляцией.
- датчик 5 напряжения Uзпт звена постоянного тока и датчик 6 максимального тока Iмакс инвертора 4;
- датчик 7, контролирующий электроснабжение и срабатывающий при пропадании и провалах напряжения.
Из инвертора 4 условно вынесены функциональные блоки, иллюстрирующие осуществление способа управления при нарушении электроснабжения: элементы задержки 8 и 9, переключающие блоки 10 и 11, схема сравнения 12 и регуляторы 13, 14. В составе регуляторов 13 и 14 на фиг.3 показаны сумматоры 15-19, интеграторы 20, 21 и усилители 22, 23.
На входах регуляторов 13 и 14 заданы значения:
Uзпт.доп - допустимого напряжения звена постоянного тока;
Iпуск.доп - допустимого пускового тока электродвигателя.
 - начальной скорости изменения (снижения и нарастания) выходного напряжения преобразователя.
- начальной скорости изменения (снижения и нарастания) выходного напряжения преобразователя.
Кроме того, на фиг.3 обозначены сигналы f(t) и u(t), управляющие выходной частотой и выходным напряжением преобразователя путем изменения соответствующих параметров модулирующего сигнала, формирующего основную гармонику ШИМ-напряжения инвертора 4.
Способ осуществляют следующим образом.
Датчик 7 контролирует напряжение сети, питающей преобразователь, и до момента t1 выдает сигнал (см. фиг.1а) высокого уровня, соответствующий нормальному электроснабжению. При таком сигнале датчика 7 переключатели блока 10 находятся в исходном состоянии, показанном на фиг.3. Это состояние соответствует рабочему режиму управления, при котором выходная частота преобразователя fвых (см. фиг.1б) устанавливается в соответствии с технологическими требованиями (например, для поддержания заданного напора на выходе насоса), а выходное напряжение Uвых (см. фиг.1в) - в соответствии с выбранным методом регулирования (например, в заданной зависимости от установленной частоты fвых).
С момента t1 и до момента t3 датчик 7 фиксирует нарушение электроснабжения (перерыв питания или провал напряжения сети на входе преобразователя ниже заданного допустимого уровня), выдавая сигнал (см. фиг.1а) низкого уровня. Этот сигнал переводит переключатели блока 10 в состояние (левое на фиг.3), при котором выходная частота fвых принимает и сохраняет значение, которое она имела в момент t1, а выходное напряжение Uвых изменяется, повторяя форму сигнала u(t), поступающего из блока 11.
После момента t1 и до момента t3 переключатель блока 11 находится в состоянии, показанном на фиг.3, и выдает с выхода сумматора 19 в блок 10 управляющий сигнал u(t), обеспечивающий снижение выходного напряжения от значения Uвых(t1) до нуля к моменту t2 (см. фиг.1в) со скоростью, определяемой регулятором 13. Снижение выходного напряжения преобразователя при фиксированной выходной частоте сопровождается рекуперацией энергии электромагнитного поля двигателя 2 в звено постоянного тока с подзарядом конденсатора сглаживающего LC-фильтра. Во избежание заряда конденсатора выше допустимого уровня напряжение звена постоянного тока поддерживают на заданном допустимом уровне, ограничивая скорость снижения выходного напряжения, определяемую сигналом u(t).
Для этого сигнал u(t) может формироваться, например, следующим образом. Исходное значение скорости  изменения напряжения поступает на входы сумматоров 16 и 17. (Возможна также подача различных исходных значений скорости на вход сумматора 16 и на вход сумматора 17). Сумматор 15 вычисляет разность напряжения Uзпт звена 3 и допустимого напряжения Uзпт.доп, которая увеличивается в k раз усилителем 22. При положительном значении этой разности выходной сигнал сумматора 16 уменьшается перед поступлением в интегратор 20. Выходной сигнал интегратора 20, вычитаясь на сумматоре 19 из первоначального (зафиксированного в момент t1) значения u(t1), формирует сигнал u(t), который через переключатели 11 и 10 задает форму спада выходного напряжения преобразователя.
изменения напряжения поступает на входы сумматоров 16 и 17. (Возможна также подача различных исходных значений скорости на вход сумматора 16 и на вход сумматора 17). Сумматор 15 вычисляет разность напряжения Uзпт звена 3 и допустимого напряжения Uзпт.доп, которая увеличивается в k раз усилителем 22. При положительном значении этой разности выходной сигнал сумматора 16 уменьшается перед поступлением в интегратор 20. Выходной сигнал интегратора 20, вычитаясь на сумматоре 19 из первоначального (зафиксированного в момент t1) значения u(t1), формирует сигнал u(t), который через переключатели 11 и 10 задает форму спада выходного напряжения преобразователя.
После снижения выходного напряжения Uвых ниже заданного уровня, близкого к нулю, электромагнитное поле двигателя 2 практически погашено и инвертор 4 преобразователя запирают.
Это может быть осуществлено, например, следующим образом. Когда сигнал u(t) на выходе переключателя 11, задающий форму выходного напряжения Uвых преобразователя, уменьшится до заданной величины uзад, равной нулю, схема сравнения 12 через элемент 9 задержки выдаст сигнал, запирающий инвертор 4 преобразователя (запирание инвертора означает запирание его IGBT-транзисторов).
В другом частном случае момент запирания инвертора 4 может быть определен, например, путем отсчета заданной задержки от момента t1 нарушения электроснабжения (т.е. запуском элемента 9 не от схемы 12, а по сигналу датчика 7 в момент t1).
В момент t3 датчик 7 сигнализирует возобновление нормального электроснабжения (см. фиг.1а). При этом элемент 8 обеспечивает задержку возврата переключателя 10 в исходное (правое на фиг.3) положение, а переключатель 11 сигналом датчика 7 переводится в положение (правое на фиг.3), при котором сигнал u(t) поступает с интегратора 21. В результате сигнал u(t) возрастает со скоростью, управляемой регулятором 14, в состав которого входят сумматоры 17, 18, интегратор 21 и усилитель 23. Регулятор 14 функционирует аналогично регулятору 13, но вырабатывает сигнал с нулевым начальным значением и уменьшает скорость нарастания выходного напряжения Uвых при увеличении максимального пускового тока двигателя, измеряемого датчиком 6, выше Iзад. Этим обеспечивается ограничение скорости нарастания выходного напряжения Uвых, необходимое для поддержания пускового тока электродвигателя 2 на заданном допустимом уровне.
Все время от момента t1 до момента t4, т.е. до истечения времени задержки элемента 8, отсчитываемой от момента t2, переключатель 10 находится в состоянии (левом на фиг.3), при котором управляющий сигнал f(t) равен f(t1), а выходная частота (см. фиг.1б) равна частоте, ранее установленной в рабочем режиме управления и сохраненной в момент t1. В других частных случаях значение управляющего сигнала f(t) может меняться в момент t2 или t3. При этом частота, задаваемая сигналом f(t) до момента t4 (до окончания задержки элемента 8), может, например, быть равной или пропорциональной f(t1) или устанавливаться в соответствии с фактической частотой вращения питаемого преобразователем двигателя, которая может определяться либо с помощью датчика, либо бездатчиковым методом.
После истечения времени задержки элемента 8 переключатель 10 возвращается в положение, показанное на фиг.3. Это положение соответствует рабочему режиму управления, в котором частота выходного напряжения преобразователя изменяется в соответствии с выбранным технологическим параметром, а напряжение - в соответствии с выбранным принципом регулирования (скалярное или векторное регулирование).
Описанное выше поясняет и подтверждает возможность осуществления предлагаемого способа. На практике устройство управления преобразователем частоты, реализующее предлагаемый способ, выполняется, как правило, на базе программируемого контроллера, что позволяет обеспечить указанный выше технический результат без значительных капитальных затрат.
На фиг.1 и фиг.2 показаны кривые изменения электромагнитного вращающего момента М (фиг.1г и фиг.2б) и угловой скорости ω (фиг.1д и фиг.2в) двигателя, питаемого преобразователем, который управляется по предлагаемому и известному способам соответственно.
Из сравнения этих кривых видно, что в отличие от известного способа управления предлагаемый способ при возникновении нарушений электроснабжения снижает уровень выходного напряжения преобразователя, сохраняя его выходную частоту, и тем самым обеспечивает гашение магнитного поля двигателя без приложения тормозного электромагнитного момента (т.е. момента с отрицательным знаком) к валу электродвигателя. Благодаря этому угловая скорость ω двигателя (и приводимого им технологического механизма) спадает медленнее, что улучшает начальные условия разгона электродвигателя после возобновления электроснабжения и замедляет падение производительности приводимого технологического механизма при кратковременных нарушениях электроснабжения.
Эффективность предлагаемого решения была подтверждена экспериментально.
Источники информации
1. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. Учебник. М.: Академия, 2006 г.
2. Тарасов Д.В. Требования к частотно-регулируемым электроприводам насосов и вентиляторов при аварийных режимах в системе электроснабжения котельных. Электрические станции. 2006 г., №1, стр.52-56.
3. Компания Emotron. Преобразователь частоты. Руководство по эксплуатации. 2004 г. Стр.51, пункт 5.4.37 «Преодоление провалов напряжения».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| ОДНОФАЗНЫЙ АВТОНОМНЫЙ ИНВЕРТОР С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2420854C1 |
| Устройство для управления асинхронным двигателем | 1990 |
|
SU1714783A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| СПОСОБ ПОДХВАТА ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2011 |
|
RU2462808C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ИСТОЧНИК ПИТАНИЯ С ВОЗМОЖНОСТЬЮ СТУПЕНЧАТОЙ НАГРУЗКИ | 1997 |
|
RU2179777C2 |
| Синхронно-синфазный электропривод | 1987 |
|
SU1501240A1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ПЕРЕМЕННОЕ | 2003 |
|
RU2255412C1 |
Использование: для частотного регулирования электропривода. Технический результат заключается в улучшении начальных условий разгона электродвигателя преобразователем частоты и в замедлении падения скорости вращения приводимого технологического механизма. При управлении преобразователем частоты со звеном постоянного тока и инвертором напряжения с широтно-импульсной модуляцией (ШИМ) прерывают рабочий режим управления, сохраняют выходную частоту, снижают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне напряжение звена постоянного тока, и запирают инвертор, а после восстановления электроснабжения включают инвертор, повышают выходное напряжение и возобновляют рабочий режим управления. Момент запирания инвертора устанавливают путем отсчета заданной задержки от момента снижения выходного напряжения до заданной величины или от момента фиксации нарушения электроснабжения. После восстановления электроснабжения выходную частоту устанавливают равной или пропорциональной ее сохраненному значению или в соответствии с фактической частотой вращения электродвигателя, питаемого преобразователем, и повышают выходное напряжение со скоростью, которую ограничивают, поддерживая на заданном уровне пусковой ток электродвигателя, питаемого преобразователем. 5 з.п. ф-лы, 3 ил.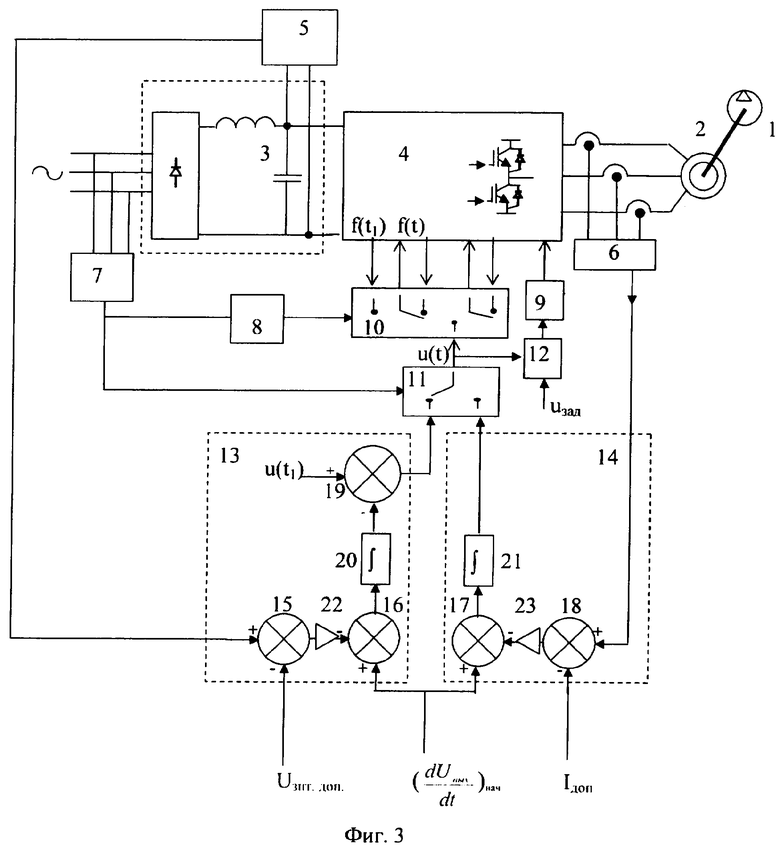
| Способ частотного управления двигателем переменного тока | 1977 |
|
SU668055A1 |
| Прибор для регистрирования сваливания револьвера при наводке | 1932 |
|
SU32333A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДНОЙ СИСТЕМОЙ БОЛЬШОЙ МОЩНОСТИ | 2000 |
|
RU2183570C1 |
| DE 4316365 A, 01.12.1994. | |||

