1
Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока с широкимдиапазоном регулирования частоты.
Известен способ частотного управления скоростью двигателя переменного тока, заключающийся в том, что изменяют напряжение на входе звена постояннЪго тока инвертора и частоту напряжения на выходе инвертора, причем напряжение на входе звена постоянного тока инвертора изменяют пропорционально сигналу задания по частоте, при этом за счет нелинейной обратной связи между частотой оЗц и напряжением U на выходе инвертора обеспечивается некоторое улучшение механических характеристик двигателя при низких частотах 1.
Недостатком известного способа является низкая точность поддержания оборотов, сложность, так как требуется точный преобразователь «частота-напряжение и ограниченный частотный диапазон получения жестких механических характеристик двигателя.
Ниболее близким техническим решением к данному изобретению является способ.
заключающийся в частотном управлении двигателем переменного тока при работе от инвертора со звеном постоянного тока, включающий в себя операции регулирования частоты и напряжения на выходе инвертора, причем сигнал задания по частоте регулируют в функции изменения напряжения на входе инвертора, сигнал задания которого определяет величину частоты выходного напряжения инвертора 2.
Недостатком этого способа управления является низкая точность стабилизации частоты, что особенно проявляется при щироком диапазоне изменения скорости и момента нагрузки двигателя.
Цель изобретения - повышение точности стабилизации частоты. .-..:.-л-.-; ......
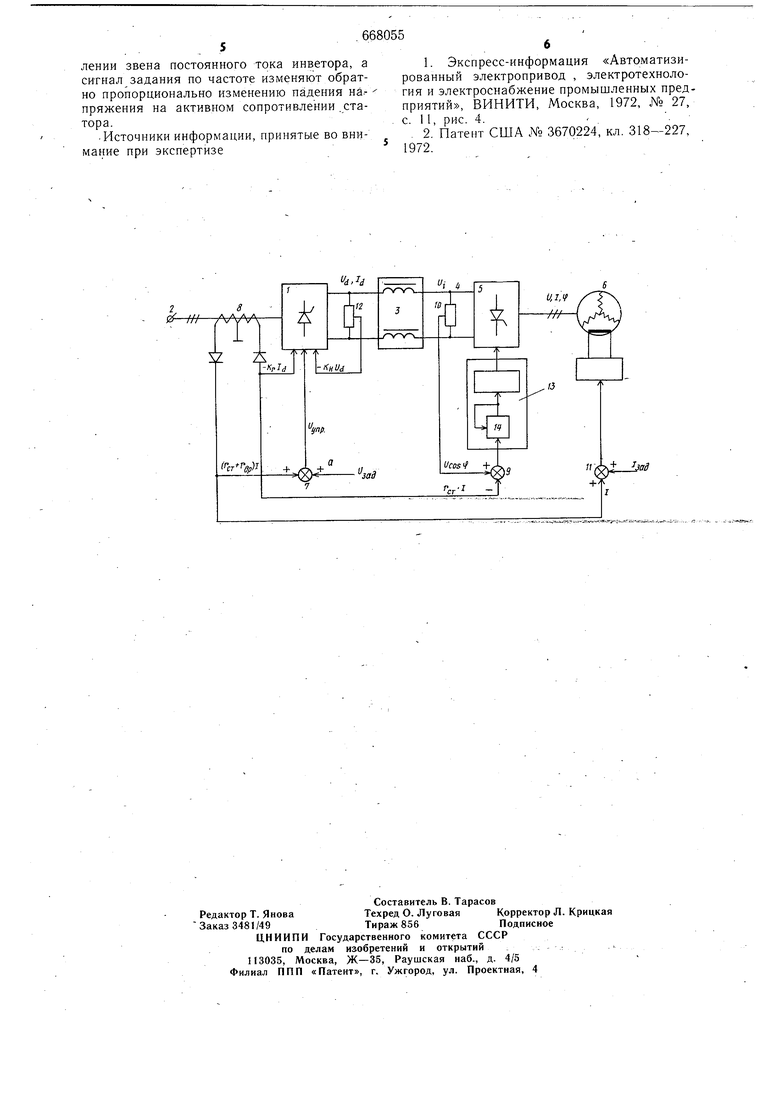
Для этого при частотном управлении двигателем переменного тока при работе от инвертора со звеном постоянного тока, включающем в себя операции регулирования частоты и напряжения на выходе инвертора, причем сигнал задания по частот регулируют в функции изменения напряжения на входе инвертора, сигнал задания которого определяет величину частоты выходного .напряжения инвертора, сигнал задания напряжения на входе инвертора изменяют пропорционально падению напряжения на актйвном сопротивлении Статорами активном согтротивлении звена постоянного тока йн Btptopa; а сигнал задания по частоте изменяют обратно пропорционально изменению напряжения на активном сопротивлении статора. На чертеже представлена принципи альная электрическая блок-схема преобразова теЛЯ частоты, реализующего предлагаемый способ частотного управления двигателем переменного тока. Преобразователь содержит управляемый выпрямитель 1, питаемый от сети 2 переменного тока. Выход выпрямителя 1 через звено 3 постоянного тока подключен к входным шинам 4 инвертора 5, нЗТружеННОго, например, на синхронный двигатель6. Сигнал управления выпрямителем 1 формйруется на выходе сумматора 7 из сигнаЛОВ, пропорциональных положительному сигналу а задания по напряжению и положительному сигналу, пропорциональному падеиию напряжения на активном сопротивлении статора двигателя 6, и активном сопротивлении звена 3 постоянного тока, который снимается с датчика 8 тока в силовой цепи преобразователя. Сигнал задания по частоте, определяющий частоту напряжения на выходе инвертора, формируется на выходе сумматора 9 -йЭ положительного сигнала, пропорционального напряжению на входных шинах 4 инвертора 5 и отрицательного сигнала, пропорционального падению напряжения на актиБном сопротивлении статора двигателя 6. Напряжение на входных шинах 4 инвертора 5 снимается с делителя 10, а напряжение на активном сопротивлении статора - с датчика 8. тока.. . .. Ток возбуждения, если Двигатель синхронный, задается регулятором 11, на один из, входов которого поступает положительный сигнал, пропорциональный току статора двигателя, т. е. току в силовой цепи преобразователя, поэтому указанный сигнал унимается с датчика 8 тока. Этим обеспечивается изменение тока возбуждения дви Гателя пропорционально току статора (с ростом тока статора увеличивается ток возбуждения). С делителя,12 на выходе управляемого выпрямителя 1 снимается сигнал, обесггечиваюший режим стабилизации напряжения на выходе выпрямителя. Входным элементом системы управления инвертором 13 является, например, задающий генератор 14 с интегратором на входе. Частотное управление скоростью двигаteля осуществляется следующим образом. В установившемся режиме сигнал на выходе сумматора 7 связан с выходным напряжением U выпрямителя 1 соотношением (в относительных единицах) .,,p изав + {гст+TSP ).:, где г, Гур - активные сопротивления статора двигателя и звена- постоянного тока инвертора в относительных единицах; 3 - ток в силовой цепи преобразователя в относительных единицах. При этом сигнал на выходе сумматора 9 связан с частотой (относительное значение а -) напряжения на выходе, инвертора следующим образом исо5ф. rtm- ct (costp -г „), где и - напряжение на выходе инвертора;. ,Ф-угол инвертирования (угол между первыми гармониками тока и напряжения на выходе инвертора), Созфн--значение cos р двигателя в номинальном режиме. Так как в установившемся режиме напряжение и на выходе выпрямителя 1 и напряжения U на входных шинах инвер тора 5 отличаются -на величину падения напряжения на активном сопротивлении звена постоянного тока инвертора, т. е. Ui исо5ф . Л, то., используя два первых реверса, палучим UcOSCfi а (С05ф„- Ге) -t- Гст,-3 Uj - - ,,- J (U + (г«„ + г ) .J- г . J, откуда (1 - - Св5Чч Г« т; е. в широком диапазоне изменения частоты (практически .от нуля), независимо от момента нагрузки на валу двигателя, частота выходного напряжения инвертора определяется только величиной сигнала U|,«j, при этом обеспечивается компенсация падения напряжения на активном сопротивлении (;татора в неограниченном диапазоне изменения скорости двигателя. Таким образом, данный способ частотного управления значительно повышает точность стабилизации частоты выходного напряжения инвертора и жескость механических характеристик двигателя переменного тока. --. Формула изобретения Способ частотного управления двигателем переменного тока при работе от инвертора со звеном постоянного тока, включающий в себя операции регулирования частоты и напряжения на выходе инвертора, причем сигнал задания по частоте регулируют в функции изменения напряжения на входе инвертора, сигнал задания которого определяет величину частоты выходногб напряжения инвертора, отличающийся тем, что, с целью повышения точности стабилизации частоты, сигнал задания напряжения на выходе инвертора изменяют пропорционально падению напряжения на активном сопротивлении статора и активном сопротивлении звена постоянного тока инветора, а сигнал задания по частоте изменяют обратно пропорционально изменению падения на-пряжения на активном сопротивлении.статора.
Источники информации, принятые во внимание нри экспертизе
1. Экспресс-информация «Автоматизированный электропривод , электротехнология и электроснабжение промышленных пред, приятии, ВИНИТИ, Москва, 1972, № 27, с. 11, рис. 4.-.
- 2. Патент США № 3670224, кл. 318-227, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
