Изобретение относится к электротехнике и может быть использовано в частотно-регулируемых электроприводах. Предлагаемое устройство может быть использовано для создания автоматизированных электроприводов переменного тока с частотным управлением без дополнительных датчиков скорости.
При использовании автоматизированных электроприводов с частотным управлением двигателями переменного тока без дополнительных датчиков скорости возникают проблемы поддержания скорости. Особенное значение эта проблема приобретает при моментных нагрузках, изменяющихся в пределах номинального значения и диапазоне регулирования скорости более чем 1:100.
Из уровня техники известно, что стандартным решением в данной области является введение в систему управления электропривода так называемой IR-компенсации. При малых частотах и малых напряжениях на асинхронном двигателе (АД) возрастает роль падения напряжения на активном сопротивлении статора. Если снижать напряжение строго пропорционально частоте, то это приведет к уменьшению магнитного потока электродвигателя (ЭД). Поэтому, в частотном приводе напряжение должно снижаться в меньшей степени, чем  . Для этого применяют систему IR-компенсации, в которой данный закон регулирования заменен соотношением
. Для этого применяют систему IR-компенсации, в которой данный закон регулирования заменен соотношением

В приводах, в которых производится компенсация падения напряжения на сопротивлении статора, поддерживается постоянное соотношение между частотой и напряжением |U1 - I1⋅R1|. Это напряжение отличается от напряжения, подаваемого на статор электродвигателя, на величину падения напряжения на активном сопротивлении статора.
Упрощенная схема частотного электропривода с IR-компенсацией представлена на фиг. 4.
В приводе использован автономный инвертор напряжения (АИН) с управляемым выпрямителем (УВ), сигнал Uf, определяющий частоту задания, поступает на систему управления инвертором. Датчик тока (ДТ) производит измерение тока статора I1 и вырабатывает напряжение, пропорциональное амплитуде тока статора. Это напряжение поступает на вход управляемого выпрямителя (УВ) и увеличивает напряжение, подаваемое на статор электродвигателя. В результате выходное напряжение выпрямителя изменяется так, чтобы обеспечить необходимую связь между напряжением и частотой. Простота реализации данного решения привела к тому, что функция введения и изменения IR-компенсации стала стандартной для большинства промышленных преобразователей частоты.
Однако, как показал опыт практического применения электроприводов, введение IR-компенсации не позволяет полностью компенсировать статическую ошибку по скорости при значительном изменении нагрузки, в большом диапазоне регулирования скорости, кроме того, значительное увеличение значения IR-компенсации, которая является положительной обратной связью (ПОС) по току статора, приводит к неустойчивости процессов в цепях управления приводом, возникновению автоколебаний тока и скорости, а в некоторых случаях к полному срыву управления.
Наиболее близким устройством , позволяющим решить данную проблему, является устройство частотного управления асинхронным электроприводом (патент № 2599529 МПК H02P23/02; H02P25/02 (2006.01) опубл.10.10.2016г), которое содержит асинхронный двигатель, преобразователь частоты и напряжения, функциональный преобразователь, в котором реализуется зависимость амплитуды напряжения от частоты, и датчик тока статора, который формирует сигнал, пропорциональный амплитуде тока статора. Выход датчика тока соединен с входом инерционного звена первого порядка, выход которого подсоединен к входу функционального преобразователя. Как показано в описании устройства, инерционное звено в положительной обратной связи улучшает устойчивость замкнутого контура и позволяет получить необходимый коэффициент компенсации, для практически полной компенсации падения напряжения в статорной цепи при возрастании тока статора под нагрузкой, и, тем самым, для поддержания скорости с точностью 1% при номинальной скорости вращения и номинальном нагрузочном моменте.
Недостатками данного устройства является то, что принцип его работы не учитывает тот факт, что асинхронный электропривод представляет собой нелинейную систему, которая, даже при упрощении, описывается нелинейной динамической механической характеристикой (2) приведенной в известной работе А. А Усольцева «Частотное управление асинхронными двигателями» Учебное пособие. СПб: СПбГУ ИТМО, [1]:

В этой формуле: m - развиваемый двигателем момент, Sk - критическое скольжение, которое, строго говоря, изменяется при изменении синхронной скорости вращения двигателя (и, следовательно, частоты питающего статор напряжения), Sт - текущее скольжение, которое определяется скоростью вращения двигателя, Т2 - постоянная времени роторных цепей. Очевидно, что передаточная функция всего привода будет изменяться при изменении частоты питающего напряжения и синхронной скорости. Таким образом, настройка соответствующих коэффициентов функционального преобразователя для компенсации нагрузки на низких скоростях вращения приводит к неустойчивой работе на скоростях вращения близких к номинальным, и наоборот, настройка коэффициентов на частоты вращения, близкие к номинальным, приводит к неполной компенсации статической ошибки на низких оборотах.
Авторы провели исследования асинхронного электропривода с преобразователями частоты ATV32 и ATV71 производства компании Schneider Electric. Режим поддержания скорости исследовался в замкнутой по скорости системе и в разомкнутой с максимально возможным (без нарушения устойчивости) коэффициентом IR-компенсаций, которые должны обеспечивать поддержание скорости при увеличении нагрузки.
В замкнутой по скорости системе при работе на номинальной скорости и набросе номинальной нагрузки амплитуда напряжения на статоре увеличилась на 40 В, а частота напряжения - на 7 Гц, при этом, время переходного процесса в такой системе составило 0,6с.
В разомкнутой системе снижение скорости при той же нагрузке составило 30%, т.к. напряжение увеличилось на 5 В, а частота напряжения - на 1 Гц. Это произошло из-за того, что коэффициент IR-компенсации не достаточен для поддержания скорости в необходимом диапазоне изменения нагрузки. Увеличить его до необходимой величины возможности нет, т.к. безынерционная положительная обратная связь с таким коэффициентом приведет к неустойчивости электропривода.
Эксперименты, проведенные авторами, показали, что на частоте питающего напряжения 10Гц, при номинальной нагрузке для полной компенсации падения напряжения (т.е. для поддержания скорости, соответствующей 10Гц с погрешностью менее 1%) необходимо повысить его на 30В, а для устойчивости привода постоянная времени инерционного звена должна быть 100мс, для других частот питающего напряжения, значения постоянной времени и величина необходимого повышения напряжения приведены в таблице 1.
Таблица 1.
Техническая задача изобретения направлена на обеспечение эффективности корректирующей положительной обратной связи по току статора в диапазоне скоростей электропривода не менее 1:100 при номинальной нагрузке и при сохранении устойчивости системы управления асинхронным электроприводом.
Под эффективностью понимается поддержание скорости вращения вала двигателя с точностью до 1% при нагрузке до 2Iн для электродвигателей с номинальным скольжением до 10 % и при нагрузке до 1,5Iн - со скольжением от 10% до 15%.
Технический результат изобретения - поддержание заданной скорости вращения асинхронного электродвигателя с погрешностью не более 1% при изменении момента нагрузки в широких пределах, в том числе при увеличении приложенного к приводу механического момента до полуторакратного значения номинального момента электродвигателя, и соответственно, увеличении тока статора до 1,5Iн.
Техническая задача достигается тем, что в устройство управления асинхронным двигателем, содержащем асинхронный двигатель, преобразователь частоты и напряжения, датчики тока статора, инерционное звено первого порядка с переменным коэффициентом статического усиления и переменной постоянной времени, вводятся два статических нелинейных преобразователя, на вход которых подается напряжение управления, соответствующее заданию скорости вращения, с выхода первого статического нелинейного преобразователя, сигнал соответствующий коэффициенту усиления, передается на второй вход инерционного звена, с выхода второго статического нелинейного преобразователя сигнал, соответствующий значению постоянной времени, передается на третий вход инерционного звена. Инерционное звено имеет три входа: на первый подается сигнал с функционального преобразователя тока статора, на второй и третий, сигналы с первого и второго статических нелинейных преобразователей соответственно. Причем второй вход используется для корректировки коэффициента усиления, а третий - для корректировки постоянной времени инерционного звена. При этом сигнал тока статора связан с выходным сигналом инерционного звена уравнением:

откуда передаточная функция инерционного звена:

т.е. сигнал задания частоты изменяет коэффициент усиления и постоянную времени инерционного звена.
Заявленное устройство представлено на следующих фигурах:
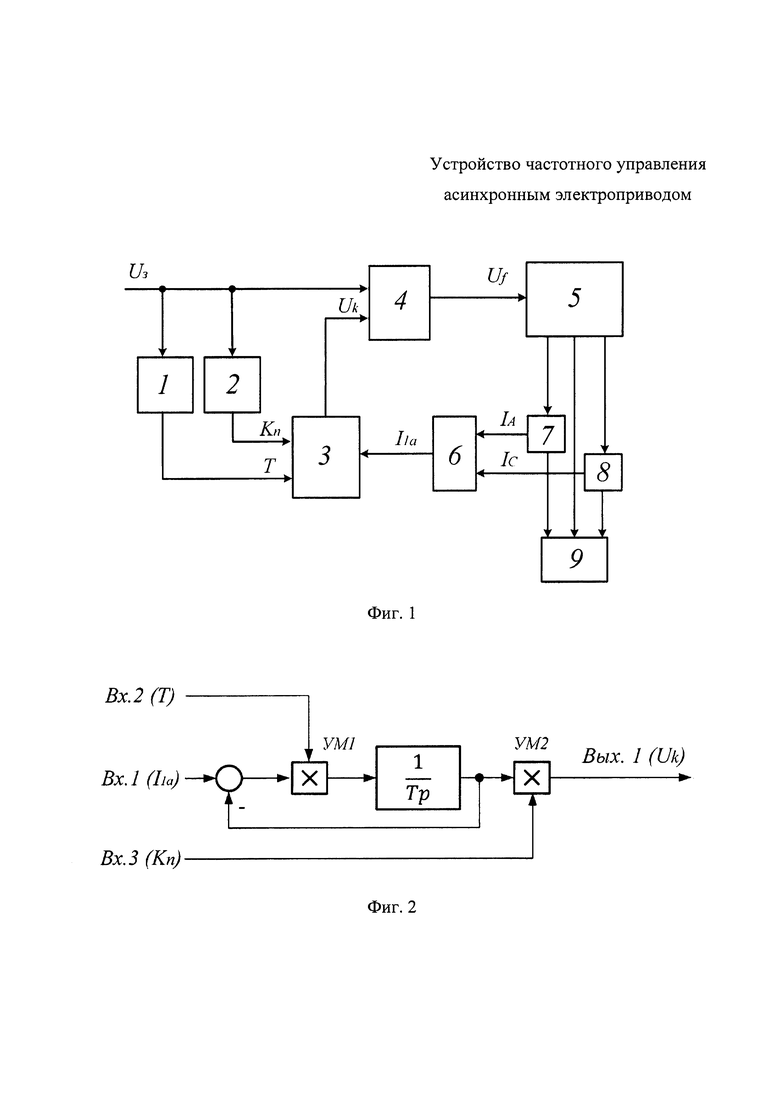
на Фиг.1 представлена блок-схема устройства частотного управления асинхронным электроприводом,
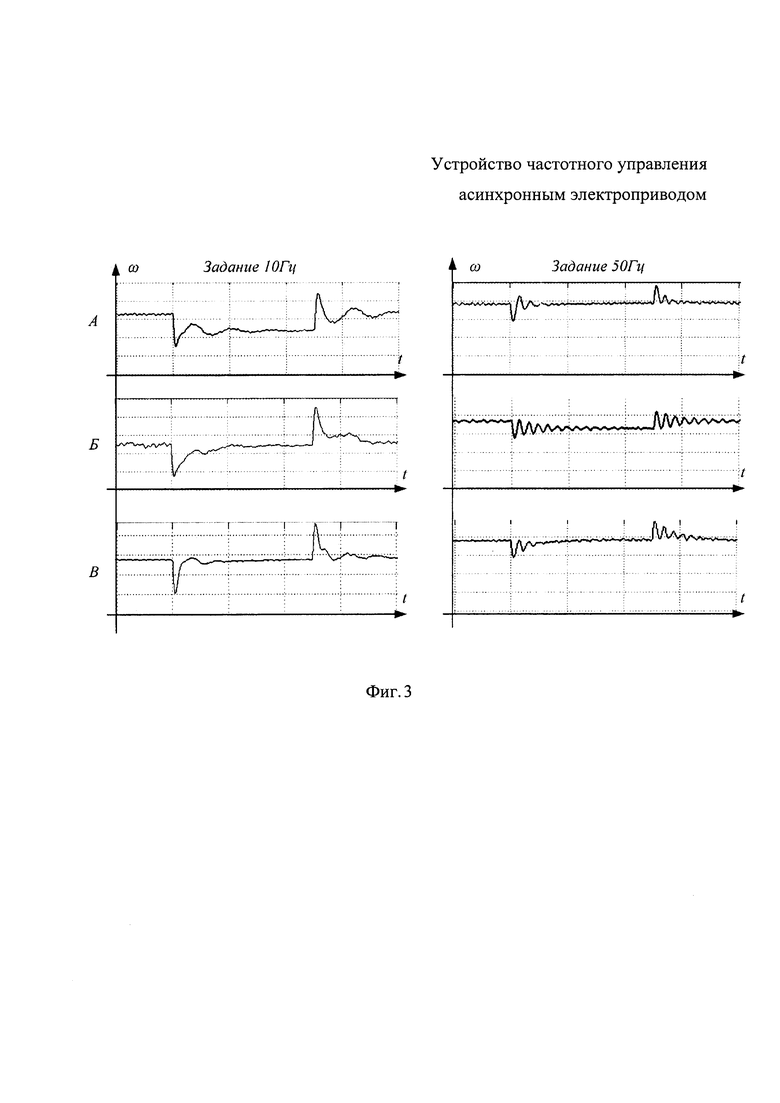
на Фиг. 2 представлен вариант реализации инерционного звена первого порядка с переменными коэффициентом усиления и постоянной времени,
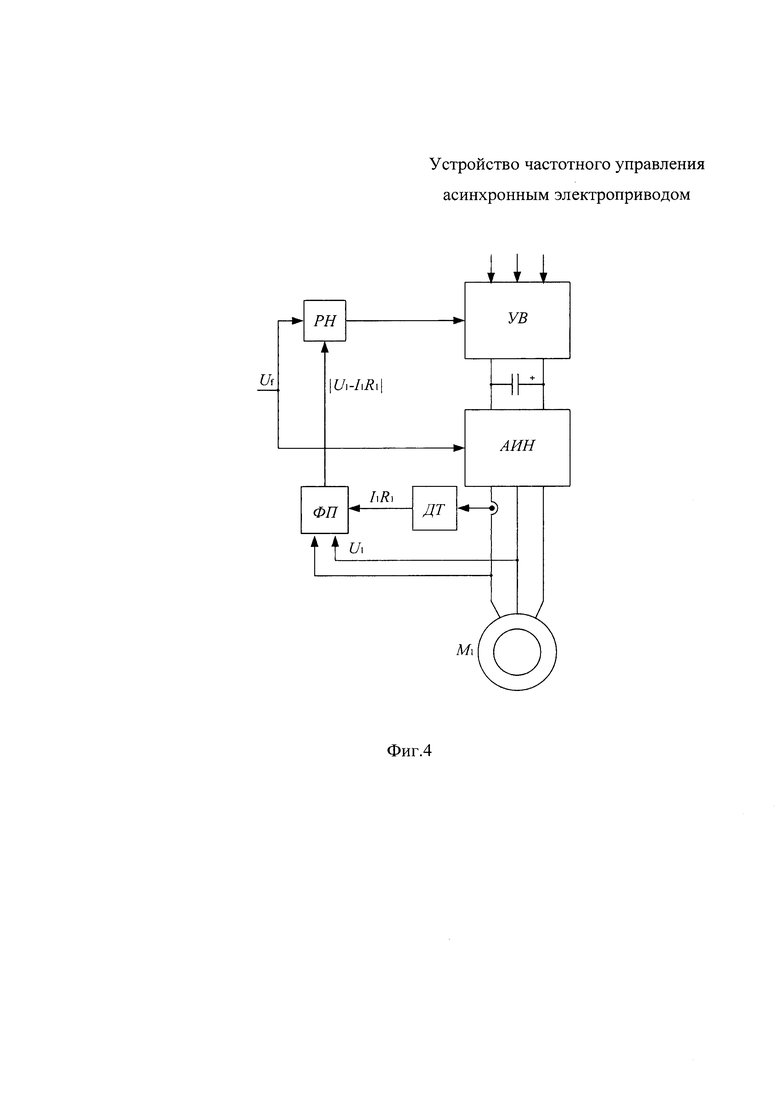
на Фиг. 3 представлены диаграммы скоростей при заданной скорости вращения 10 и 50Гц, и набросе номинальной нагрузки:
А - при значениях коэффициента усиления и постоянной времени инерционного звена, оптимизированных для работы на частоте задания 50Гц, при этом привод находится в устойчивом состоянии и полностью компенсируется падение скорости на частоте задания 50Гц, но наблюдается «провал» скорости на частоте 10Гц;
Б - при значениях коэффициента усиления и постоянной времени инерционного звена, оптимизированных для работы на частоте задания 10Гц, при этом полностью компенсируется падение скорости на частоте задания 10Гц, но на частоте задания 50Гц привод становится не устойчивым;
В - при работе привода с инерционным звеном первого порядка с переменными коэффициентом усиления и постоянной времени, при этом полностью компенсируется падение скорости и сохраняется устойчивость привода на всех рабочих частотах.
Данный вариант используется в тех случаях, когда невозможна установка датчиков скорости и требуется поддержание скорости в пределах ±1% от заданного.
На Фиг. 1 представлена схема устройства частотного управления асинхронным электроприводом.
На Фиг. 1 цифрами обозначены:
1 - статический нелинейный преобразователь 1;
2 - статический нелинейный преобразователь 2;
3 - инерционное звено первого порядка;
4 - сумматор;
5 - преобразователь частоты;
6 - функциональный преобразователь тока статора;
7 - датчик тока фазы А;
8 - датчик тока фазы С;
9 - асинхронный двигатель с короткозамкнутым ротором.
Устройство управления асинхронным электроприводом (Фиг. 1) содержит асинхронный двигатель с короткозамкнутым ротором 9, статорные обмотки которого подключены к силовым выходам преобразователя частоты 5, управляющий вход которого соединен с выходом сумматора 4, на первый вход которого подается сигнал задания скорости, а в цепи статорных обмоток асинхронного двигателя включены датчики тока 7,8, выходы которых подключены к функциональному преобразователю тока 6, сигнал задания скорости подается на входы первого 1 и второго 2 нелинейных преобразователей, выходы которых соединены со вторым и третьим управляющими входами инерционного звена первого порядка 3 с изменяемыми коэффициентом усиления и постоянной времени, первый вход которого соединен с выходом функционального преобразователя тока 6, а выход соединен со вторым входом сумматора 4.
На Фиг.2 приведен вариант реализации инерционного звена Фиг.1;3 с переменными коэффициентом усиления и постоянной времени.
На Фиг. 2 обозначены:
УМ1 - умножающее звено; УМ2 - умножающее звено;

Умножающее звено УМ1 изменяет постоянную времени инерционного звена 3, а умножающее звено УМ2 изменяет коэффициент усиления. Инерционное звено 3 (Фиг.2) имеет три входа: на первый подается сигнал с функционального преобразователя тока статора 6, на второй и третий, сигналы с первого и второго статических нелинейных преобразователей 1,2 соответственно. Причем второй вход используется для корректировки коэффициента усиления, а третий - для корректировки постоянной времени инерционного звена. При этом сигнал тока статора связан с выходным сигналом инерционного звена 3 уравнением (3), откуда передаточная функция инерционного звена 3 связана уравнением (4), т.е. сигнал задания частоты изменяет коэффициент усиления и постоянную времени инерционного звена 3.
Введение в систему инерционного звена первого порядка 3 (Фиг.1;3) с переменными коэффициентом усиления и постоянной времени, позволяет обеспечить устойчивость электропривода и практически полную компенсацию статической ошибки во всем доступном диапазоне скоростей вращения привода и моментов нагрузки.
Устройство работает следующим образом
При разгоне до заданной скорости на вход преобразователя частоты 5 (Фиг.1) поступает сигнал Uf, который соответствует напряжению Uз и заданной частоте, сигнал задания поступает на первый 1 и второй 2 статические нелинейные преобразователи, формирующие необходимые для данной скорости значения коэффициента усиления Кп и постоянной времени Т, соответственно, которые в дальнейшем поступают на второй и третий входы инерционного звена 3, и устанавливают необходимые коэффициент усиления Кп и постоянную времени Т. На первый вход инерционного звена 3 поступает сигнал, соответствующий значению тока статора I1a, выделенный при помощи датчиков тока 7,8 и обработанный в функциональном преобразователе тока 6. При малых токах статора на первый вход инерционного звена 3 поступает сигнал, близкий к нулю и амплитуда напряжения, подаваемого на статор не меняется. При увеличении нагрузки возрастает статорный ток и уменьшается скорость вращения, но одновременно, возрастает сигнал на выходе датчиков тока статора 7,8 и далее на входе функционального преобразователя тока статора 6 и на входе инерционного звена 3, выходной сигнал которого благодаря подобранному на данной частоте коэффициенту усиления формирует необходимое увеличение напряжение на статоре двигателе, чтобы скорость не менялась по сравнению с заданной, а постоянная времени инерционного звена 3 была такой, чтобы сигнал коррекции Uk подавался с необходимой временной задержкой для сохранения устойчивости привода.
Таким образом, установка 2-х статических нелинейных преобразователей и инерционного звена первого порядка с переменным коэффициентом передачи и изменяемой постоянной времени, изменяющимися в зависимости от заданной частоты вращения, позволяет получить поддержание заданной скорости вращения асинхронного электродвигателя с погрешностью не более 1% при изменении момента нагрузки в широких пределах, в том числе при увеличении приложенного к приводу механического момента до полуторакратного значения номинального момента электродвигателя, и соответственно, увеличении тока статора до 1,5Iн во всем рабочем диапазоне частот вращения электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2599529C1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Привод стиральной машины | 1988 |
|
SU1583501A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |
Изобретение относится к области электротехники и может быть использовано в частотно-регулируемых электроприводах. При использовании автоматизированных электроприводов с частотным управлением двигателями переменного тока без датчиков скорости возникают проблемы поддержания скорости. Особенное значение эта проблема приобретает при моментных нагрузках. Техническим результатом является обеспечение эффективности корректирующей положительной обратной связи по току статора в диапазоне скоростей электропривода не менее 1:100 при номинальной нагрузке и при сохранении устойчивости системы управления асинхронным электроприводом. В устройство управления асинхронным двигателем вводится инерционное звено первого порядка с переменным коэффициентом статического усиления и переменной постоянной времени и два статических нелинейных преобразователя. Статические нелинейные преобразователи формируют требуемые для заданной скорости вращения значения статического коэффициента усиления и постоянной времени во всем рабочем диапазоне скоростей. 2ил, 1 табл.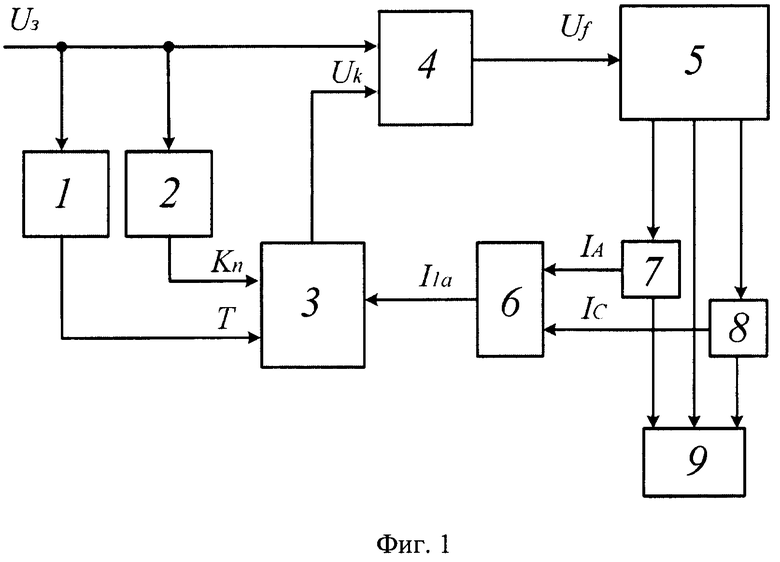
Устройство частотного управления асинхронным электроприводом, содержащее асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к силовым выходам преобразователя частоты, управляющий вход которого соединен с выходом сумматора, на первый вход которого подается сигнал задания скорости, а в цепи статорных обмоток асинхронного двигателя включены датчики тока, выходы которых подключены к функциональному преобразователю тока, отличающееся тем, что в устройстве установлены первый и второй статические нелинейные преобразователи и инерционное звено первого порядка, на входы первого и второго статических нелинейных преобразователей подается напряжение управления, соответствующее сигналу задания скорости, выход первого нелинейного преобразователя соединен со вторым входом инерционного звена, а выход второго нелинейного преобразователя соединен с третьим входом инерционного звена, первый вход которого соединен с выходом функционального преобразователя тока, а выход соединен со вторым входом сумматора.
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2599529C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| Электропривод | 1986 |
|
SU1365332A1 |
| DE 102015203524 A1, 15.09.2016 | |||
| Устройство для создания и регулирования газовой среды в хранилищах плодоовощной продукции | 2018 |
|
RU2714234C2 |
| JP 4808289 B2, 02.11.2011 | |||
| US 8350517 B2, 08.01.2013 | |||
| EP 3110000 A1, 28.12.2006. | |||

