Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД реализованный в электронно-гидромеханической САУ супервизорного типа [1]. Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114 [2].
САУ содержит электронный регулятор (ЭР), резервный гидромеханический регулятор (ГМР), селектор и блок исполнительных элементов (ИЭ).
Способ заключается в том, что в ЭР с помощью датчиков ЭР измеряют положение рычага (РУД) управления двигателем и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в ГМР с помощью датчиков ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на ИЭ и осуществляют управление двигателем, при отказе ЭР с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем.
Недостатком этого способа является следующее.
Отказы ЭР имеют разное влияние на возможность управления двигателем. Например, отказ электрогидропреобразователя управляющего воздействия ЭР, входящего в блок ИЭ, действительно делает невозможным управление двигателем от ЭР. А отказ датчика температуры (Твх) воздуха на входе в двигатель делает невозможным расчет заданной частоты (n) вращения двигателя по программе

где α руд - положение рычага управления двигателем,
Рвх - давление воздуха на входе в двигатель.
При этом сохраняется возможность управления двигателем от ЭР, т.к. входные и выходные преобразователи и вычислитель ЭР исправны, блок ИЭ ЭР исправен. Но управление двигателем переводится на ГМР (такая логика реализована в электронном регуляторе РЭД-90, входящем в состав САУ двигателя ПС-90А), что снижает качество управления, т.к.
- номенклатура датчиков ЭР и ГМР не совпадает;
- точностные характеристики датчиков ЭР лучше, чем у ГМР;
- законов управления, реализованных в ГМР, меньше по количеству и точность их поддержания ниже.
Дополнительно при переводе управления на ГМР теряются очень важные функции, такие, например, как защита турбины от перегрева и защита двигателя от помпажа и расцепки валов компрессора и турбины.
Это, в свою очередь, приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления газотурбинным двигателем, заключающемся в том, что в электронном регуляторе (ЭР) с помощью датчиков ЭР измеряют положение рычага (РУД) управления двигателем и параметры силовой установки (СУ), в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в гидромеханическом регуляторе (ГМР) с помощью датчиков ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на блок исполнительных элементов (ИЭ) и осуществляют управление двигателем, дополнительно в ЭР в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, рассчитывают резервное управляющее воздействие ЭР, при возникновении отказов в ЭР анализируют возможные последствия отказа для ГТД и ЛА, если из-за отказа становится невозможным управление двигателем по законам управления, реализованным в ЭР, подают на ИЭ резервное управляющее воздействие ЭР, рассчитанное по законам управления, реализованным в ГМР, если из-за отказа становится полностью невозможным управление двигателем от ЭР, с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР.
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные первый блок 1 датчиков (БД), электронный регулятор 2 (ЭР), селектор 3 «электроника-гидромеханика», блок 4 исполнительных элементов (ИЭ), последовательно соединенные второй блок 5 датчиков, гидромеханический регулятор 6 (ГМР), выход которого подключен к селектору 3, блок 7 встроенного контроля (БВК), выход которого подключен к управляемому входу селектора 3.
Устройство работает следующим образом. Электронный регулятор 2 по сигналам датчиков из блока 1 по известным зависимостям (см., например, [3]) формирует управляющее воздействие на ИЭ 4, которые осуществляют требуемые изменения расхода топлива в камеру сгорания двигателя, положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха.
Работоспособность ЭР 2 оценивается БВК 12 по известным принципам (см., например, [4]).
При исправном ЭР 2 селектор 3 находится в положении «электроника» и пропускает в блок 4 ИЭ управляющие команды ЭР 2.
Дополнительно, одновременно с этим ЭР 2 по сигналам датчиков из блока 1 по зависимостям, представляющим собой программы регулирования, реализованные в ГМР 6, рассчитывает резервное управляющее воздействие на ИЭ 4, которое может обеспечить изменения расхода топлива в камеру сгорания двигателя, положения лопаток ВНА компрессора и КПВ, аналогичное тому, которое обеспечивает ГМР 6 при его включении в контур управления.
При отказе элемента ЭР 2, или датчика из блока 1, или ИЭ 4, обнаруженного БВК 7, по команде БВК 12 в ЭР 2 включается логика реконфигурации, обеспечивая анализ последствий обнаруженного отказа.
Например, отказал датчик Твх (далее приводится логика работы, реализованная в в электронном регуляторе РЭД-90А2, входящем в состав электронной САУ нового поколения, разработанной для перспективного двигателя ПС-90А2).
При этом отказе становится невозможным управление двигателем по основным программам регулирования:



где α вна - положение лопаток ВНА.

где П кпв - положение КПВ.
Однако сохраняется возможность выполнения функций защиты двигателя от помпажа, расцепки валов компрессора и турбины и защиты турбины от перегрева:

где Тг - температура газов перед турбиной.
Поэтому перевод управления на ГМР 6 не производится, включается логика реконфигурации и управление двигателем осуществляется от ЭР 2 по резервным программам регулирования:

где Gт - требуемый расход топлива в камеру сгорания двигателя,
t - время переходного режима.



При этом, естественно, сохраняются все функции - защиты двигателя от помпажа, расцепки валов компрессора и турбины и защиты турбины от перегрева.
В случае, если возникший отказ делает невозможным дальнейшее управление двигателем от ЭР 2 (например, отказ вычислительной части ЭР 2), по команде БВК 7 селектор 3 перекладывается в положение «гидромеханика» и управление двигателем переводится на ГМР 6.
Таким образом обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Список источников информации
1. Кеба И.В. «Летная эксплуатация вертолетных ГТД». М.: «Транспорт», 1976 г.
2. «Руководство по эксплуатации двигателя ТВ7-117С», ЛНПО им. В.Я.Климова, Ленинград, 1988 г.
3. Шляхтенко С.М. «Теория двухконтурных ТРД». М.: «Машиностроение», 1979 г.
4. Бодлер В.А., Рязанов Ю.А, Шаймарданов Ф.А. «Системы автоматического управления двигателями летательных аппаратов». М.: «Машиностроение», 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2432475C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2425237C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что дополнительно в ЭР в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, рассчитывают резервное управляющее воздействие ЭР, при возникновении отказов в ЭР анализируют возможные последствия отказа для ГТД и ЛА, если из-за отказа становится невозможным управление двигателем по законам управления, реализованным в ЭР, подают на ИЭ резервное управляющее воздействие ЭР, рассчитанное по законам управления, реализованным в ГМР, если из-за отказа становится полностью невозможным управление двигателем от ЭР, с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР. Технический результат - повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 1 ил.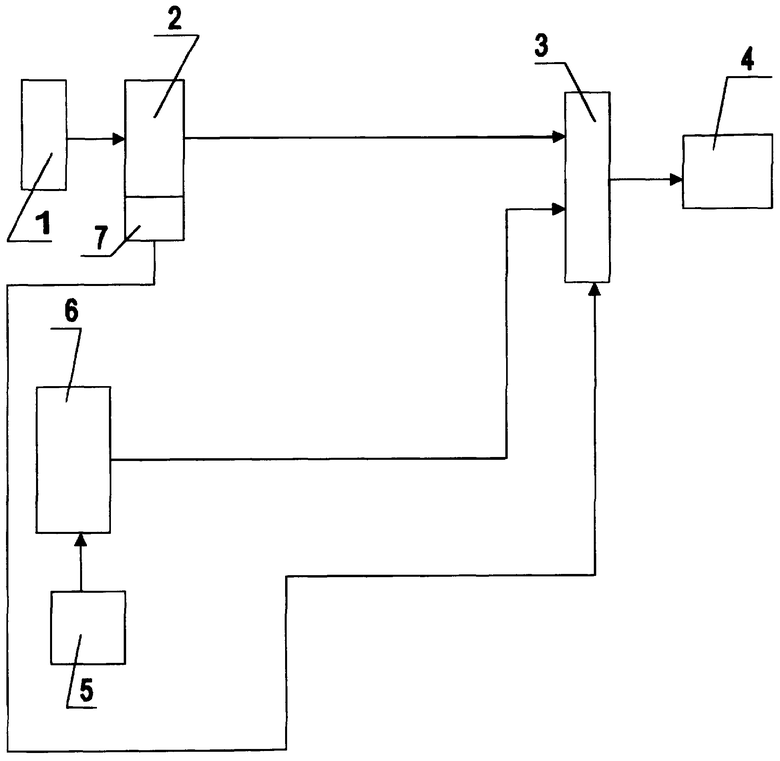
Способ управления газотурбинным двигателем, заключающийся в том, что в электронном регуляторе (ЭР) с помощью датчиков ЭР измеряют положение рычага (РУД) управления двигателем и параметры силовой установки (СУ), в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в гидромеханическом регуляторе (ГМР) с помощью датчиков ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на блок исполнительных элементов (ИЭ) и осуществляют управление двигателем, отличающийся тем, что дополнительно в ЭР в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, рассчитывают резервное управляющее воздействие ЭР, при возникновении отказов в ЭР анализируют возможные последствия отказа для ГТД и ЛА, если из-за отказа становится невозможным управление двигателем по законам управления, реализованным в ЭР, подают на ИЭ резервное управляющее воздействие ЭР, рассчитанное по законам управления, реализованным в ГМР, если из-за отказа становится полностью невозможным управление двигателем от ЭР, с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР.
| SU 1625095 A1, 15.06.1994 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| SU 1090083 A, 27.01.1996 | |||
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2194178C1 |
| US 6568166 B2, 27.06.2002 | |||
| US 4468924 A, 04.09.1984. | |||

