Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления (САУ) газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализуемый в электронно-гидромеханических САУ ГТД [1].
Электронно-гидромеханическая САУ содержит электронный регулятор (ЭР) с блоком датчиков (БД) ЭР, резервный гидромеханический регулятор (ГМР) с БД ГМР, селектор и блок исполнительных элементов (ИЭ).
Способ заключается в том, что в ЭР с помощью БД ЭР измеряют положение рычага (РУД) управления двигателем и параметры СУ в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в ГМР с помощью БД ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на ИЭ и осуществляют управление двигателем, при отказе ЭР с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем.
Недостатком этого способа является следующее. Все функции по управлению двигателем выполняет ЭР. При его отказе все функции по управлению двигателем выполняет ГМР. Полноразмерное резервирование функций приводит к тому, что существенно увеличиваются вес и габариты САУ Так, например, в САУ двигателя ПС-90А2 вес электронного регулятора РЭД-90А2 составляет 30 кг, объем 30 литров, а вес резервного гидромеханического регулятора НР-90А2 составляет 50 кг, объем 20 литров.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный в резервном ГМР электронной САУ, заключающийся в том, что при отказе ЭР переводят управление на резервный ГМР, в камеру сгорания (КС) ГТД подают постоянный расход топлива, лопатки входного направляющего аппарата (ВНА) компрессора устанавливают в положение, обеспечивающее минимальный расход воздуха через двигатель [2]. Величина расхода топлива соответствует определенному режиму работы двигателя, например, для двигателя ПС-90А2 это 660 кг/час, положение лопаток ВНА - минус 45 градусов.
Недостатком этого способа является следующее.
Высота и скорость полета самолета изменяются в большом диапазоне (для пассажирских самолетов класса Ту-204 и Ил-96-300 высота полета изменяется от земли до 11 км, скорость - от 0 до 950 км/час). Из-за этого при разных высоте и скорости полета одному и тому же расходу топлива в КС будут соответствовать разные расходы воздуха через двигатель и, как следствие, разные режимы работы газогенератора (ГГ). Так, например, для двигателя ПС-90А2 при высоте полета 500 м и скорости 350 км/час величина расхода топлива 660 кг/час соответствует частоте вращения ротора ГГ на режиме ПМГ, а на высоте 11 км при таком расходе топлива частота вращения ротора ГГ будет выше предельно допустимой.
Это приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что дополнительно формируют заданное значение частоты вращения ротора ГГ, постоянное для данного двигателя, измеряют фактическую частоту вращения ротора ГГ, сравнивают заданную и фактическую частоты вращения ГГ и по величине рассогласования изменяют положение лопаток ВНА до тех пор, пока фактическая частота вращения ГГ не станет равной заданной.
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные первый блок 1 датчиков (БД), ЭР 2, селектор 3 «электроника - гидромеханика», дозатор топлива 4 (ДТ), причем управляемый вход селектора 3 подключен к выходу блока 5 встроенного контроля (БВК), последовательно соединенные второй БД 6, ГМР 7, выход которого подключен к селектору 3, сумматор 8, первый вход которого подключен к выходу селектора 3, второй - к выходу БД 6, а выход - к регулятору 9 положения гидроцилиндра 10 привода лопаток ВНА, гидроцилиндр 10 подключен к выходам селектора 3 и регулятора 9.
Устройство работает следующим образом. ЭР 2 по сигналам датчиков из БД 1 по известным зависимостям (см., например, [3]) формирует управляющие воздействия на ДТ 4 и гидроцилиндр ВНА, которые осуществляют требуемые изменения расхода топлива в КС и положения лопаток ВНА.
Работоспособность ЭР 2 оценивается БВК 5 по известным принципам (см., например, [4]).
При исправном ЭР 2 селектор 3 находится в положении «электроника» и пропускает на ДТ 4 и гидроцилиндр ВНА управляющие команды ЭР 2.
При отказе ЭР 2, обнаруженном БВК 5, по команде БВК 5 селектор 3 перекладывается в положение «гидромеханика». При этом:
- с ДТ 4 снимается управляющий сигнал ЭР 2 и подается управляющий сигнал ГМР 7, устанавливающий ДТ 4 в положение постоянного расхода, величина которого определяется в процессе сдаточных испытаний двигателя;
- с гидроцилиндра 10 снимается управляющий сигнал ЭР 2.
После этого управление гидроцилиндром 10 осуществляется следующим образом.
На первый вход сумматора 8 через селектор 3 подается заданное значение частоты вращения ГТ, сформированное ГМР 7. На второй вход сумматора 8 из БД 6 подается фактическое значение частоты вращения ГГ. Величина рассогласования подается на вход регулятора 9. На выходе регулятора 9 формируется управляющее воздействие на гидроцилиндр 10, который устанавливает лопатки ВНА в положение, обеспечивающее расход воздуха через двигатель, который в сочетании с заданным постоянным расходом топлива обеспечивает поддержание заданной частоты вращения ГГ.
Таким образом, обеспечивается нормальная работа ГТД при управлении от ГМР на всех высотах и скоростях полета самолета, т.е. обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Источники информации
1. Шевяков А.А. Теория автоматического управления силовыми установками летательных аппаратов. М., Машиностроение, 1976 г.
2. «Сборник аннотаций изобретений», серия ВРД, ЦИАМ, выпуск №14, 1982 г.
3. Шляхтенко С.М. Теория авиационных ВРД. М., Машиностроение, 1974 г.
4. Васильев В.И. Автоматический контроль и диагностика систем управления силовыми установками летательных аппаратов. М., Машиностроение, 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2418962C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2416036C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2439349C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что при работе на резервном гидромеханическом регуляторе (ГМР) формируют заданное значение частоты вращения ротора ГГ, постоянное для данного двигателя, измеряют фактическую частоту вращения ротора ГГ, сравнивают заданную и фактическую частоты вращения ГГ и по величине рассогласования изменяют положение лопаток ВНА до тех пор, пока фактическая частота вращения ГГ не станет равной заданной. Технический результат изобретения заключается в том, что обеспечивается нормальная работа ГТД при управлении от резервного ГМР на всех высотах и скоростях полета самолета, т.е. обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 1 ил.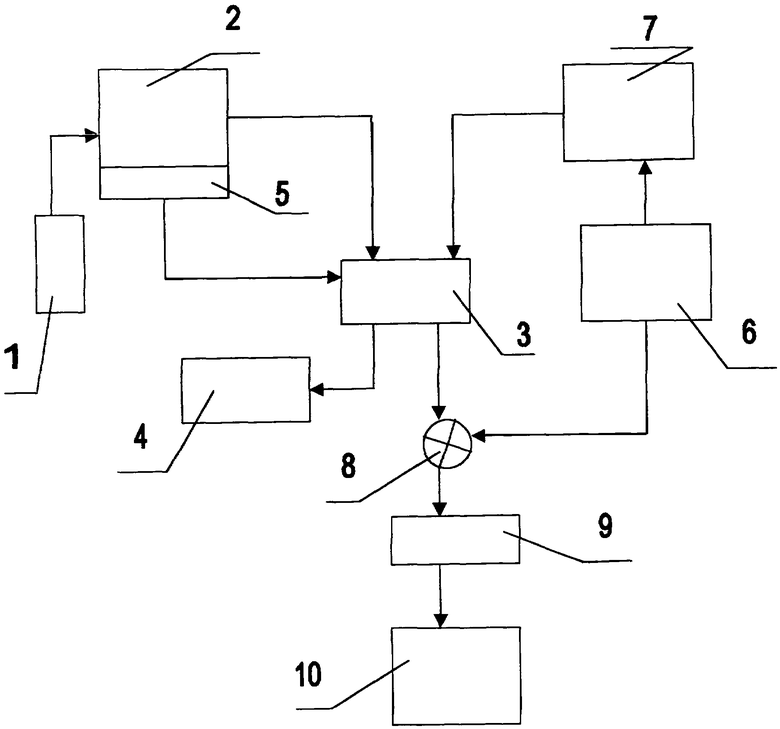
Способ управления газотурбинным двигателем (ГТД), заключающийся в том, что при отказе электронного регулятора переводят управление на резервный гидромеханический регулятор, при этом в камеру сгорания ГТД подают постоянный расход топлива, величина которого определяется в процессе сдаточных испытаний двигателя, отличающийся тем, что дополнительно формируют заданное значение частоты вращения ротора газогенератора (ГГ), постоянное для данного двигателя, измеряют фактическую частоту вращения ротора ГГ, сравнивают заданную и фактическую частоты вращения ГГ и по величине рассогласования изменяют положение лопаток ВНА до тех пор, пока фактическая частота вращения ГГ не станет равной заданной.
| ШЕВЯКОВ А.А | |||
| Теория автоматического управления силовыми установками летательных аппаратов | |||
| - М.: Машиностроение, 1976, с.269-270 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОТКЛОНЕНИЯ ПАРАМЕТРОВ СИЛОВОЙ ТУРБИНЫ ТУРБОМАШИННОГО АГРЕГАТА ПРИ ВНЕЗАПНОМ ПОЛНОМ ИЛИ ЧАСТИЧНОМ СБРОСЕ НАГРУЗКИ | 2002 |
|
RU2225945C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С РЕГУЛИРУЕМЫМ СОПЛОВЫМ АППАРАТОМ ТУРБИНЫ | 1991 |
|
RU2027049C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2194178C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2001 |
|
RU2198312C2 |
| US 5142860 А, 01.09.1992 | |||
| FR 2581129 А, 31.10.1986. | |||

