Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа, [Кеба И.В. Летная эксплуатация вертолетных ГТД, Москва, Транспорт, 1976]. Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ7-117, входящего в силовую установку (СУ) самолета Ил-114, [Руководство по эксплуатации двигателя ТВ7-117С, ЛНПО им. В.Я.Климова, Ленинград, 1988].
САУ содержит электронный регулятор (ЭР), резервный гидромеханический регулятор (ГМР), селектор и блок исполнительных элементов (ИЭ).
Способ заключается в том, что в ЭР с помощью датчиков ЭР измеряют положение рычага (РУД) управления двигателем и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в ГМР с помощью датчиков ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на ИЭ и осуществляют управление двигателем, при отказе ЭР с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем.
Недостатком этого способа является следующее.
Исправность ЭР контролируется блоком встроенного контроля (БВК). Эффективность БВК, хотя и очень высока (вероятность обнаружения отказа в современных САУ встроенными средствами контроля не ниже 0,99), но допускает
- возникновение и необнаружение одиночных отказов (необнаруженные отказы);
- непарирование двух и более отказов, возникающих одновременно (нелокализованные отказы).
Эти так называемые необнаруженные или нелокализованные отказы ЭР имеют разное влияние на работоспособность самого регулятора, а через него на работоспособность двигателя и безопасность летательного аппарата (ЛА).
Например, к тяжелым (вплоть до катастрофических) последствиям может привести неконтролируемый отказ БЦВМ, являющейся ядром любого современного ЭР (например, отказ, приводящий к невозможности начала очередного цикла работы ЭР после окончания предыдущего). Аналогичные последствия может иметь двойной отказ, заключающийся в одновременном отказе ЭР, требующем перевода управления на ГМР, и отказе селектора (например, отказ механической части электромагнита, управляющего золотником селектора).
Таким образом, не обеспечивается требуемое качество работы САУ, что приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности ЛА.
Целью изобретения является повышение надежности работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе управления ГТД, заключающемся в том, что в ЭР с помощью датчиков ЭР измеряют положение РУД управления двигателем и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в ГМР с помощью датчиков ГМР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на ИЭ и осуществляют управление двигателем, при отказе ЭР с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем, дополнительно в автономном электронном блоке (ЭБ) с помощью датчиков ЭБ измеряют и контролируют частоту вращения ротора вентилятора двигателя и частоту вращения турбины вентилятора двигателя, в ГМР с помощью датчиков ГМР измеряют и контролируют частоту вращения ротора компрессора двигателя, если частота вращения ротора компрессора превышает наперед заданное значение, в ГМР формируют команду и с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР, если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, с помощью ЭБ прекращают подачу топлива в камеру сгорания и выключают двигатель.
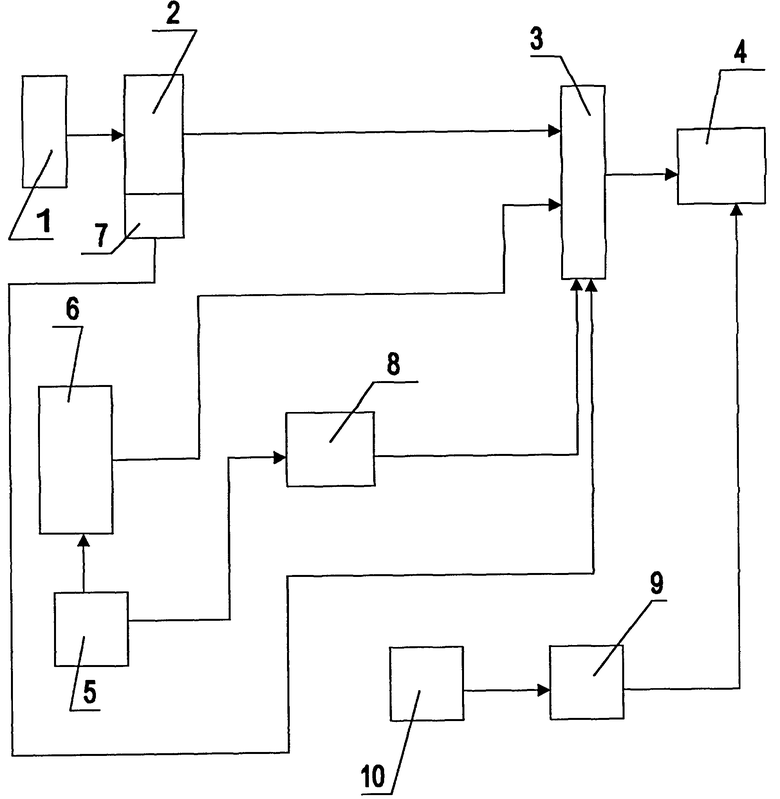
На чертеже представлена схема устройства, реализующая заявляемый способ. Устройство содержит последовательно соединенные первый блок 1 датчиков (БД), ЭР 2, селектор 3 «электроника - гидромеханика», блок 4 исполнительных элементов (ИЭ), последовательно соединенные второй блок 5 датчиков, ГМР 6, выход которого подключен к селектору 3, блок 7 встроенного контроля (БВК), выход которого подключен к управляемому входу селектора 3, устройство сравнения 8, вход которого подключен к выходу БД 5, а выход - ко входу селектора 3, автономный ЭБ 9, вход которого подключен к третьему БД 10, а выход - к блоку 4 ИЭ. Устройство работает следующим образом.
Электронный регулятор 2 по сигналам датчиков из блока 1 по известным зависимостям [см, например, Шляхтенко С.М. Теория двухконтурных ТРД, Москва, Машиностроение, 1979] формирует управляющие воздействия на ИЭ 4, которые осуществляют требуемые изменения расхода топлива в камеру сгорания двигателя, положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха.
Работоспособность ЭР 2 оценивается БВК 12 по известным принципам (см, например, Бодлер В.А. и др. Системы автоматического управления двигателями летательных аппаратов, Москва, Машиностроение, 1973).
При исправном ЭР 2 селектор 3 находится в положении «электроника» и пропускает в блок 4 ИЭ управляющие команды ЭР 2.
При отказе элемента ЭР 2, или датчика из блока 1, или ИЭ 4, обнаруженном БВК 1, по команде БВК 7 селектор 3 перекладывается в положение «гидромеханика», и управление двигателем переводится на ГМР 6.
Независимо от работы ЭР 2 и БВК 7 дополнительно в устройстве сравнения 8 постоянно контролируется частота вращения ротора двигателя, при превышении наперед заданной величины на выходе устройства 8 формируется гидравлическая команда, по которой селектор 3 перекладывается в положение «гидромеханика», и управление двигателем переводится на ГМР 6 независимо от выходного сигнала БВК 7.
Дополнительно в автономном ЭБ 9 с помощью датчиков БД 10 измеряют и контролируют частоту вращения ротора вентилятора двигателя и частоту вращения турбины вентилятора двигателя. Если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, ЭБ 9 формирует сигнал, по которому блок 4 ИЭ прекращает подачу топлива в камеру сгорания и выключает двигатель.
Таким образом, обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2425237C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2007 |
|
RU2365774C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что дополнительно в автономном электронном блоке (ЭБ) с помощью датчиков ЭБ измеряют и контролируют частоту вращения ротора вентилятора двигателя и частоту вращения турбины вентилятора двигателя, в ГМР с помощью датчиков ГМР измеряют и контролируют частоту вращения ротора компрессора двигателя, если частота вращения ротора компрессора превышает наперед заданное значение, в ГМР формируют команду и с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР, если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, с помощью ЭБ прекращают подачу топлива в камеру сгорания и выключают двигатель. Технический результат изобретения - повышение надежности работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА. 1 ил.
Способ управления газотурбинным двигателем, заключающийся в том, что в электронном регуляторе (ЭР) с помощью датчиков ЭР измеряют положение рычага (РУД) управления двигателем и параметры силовой установки (СУ) в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, формируют управляющее воздействие ЭР, в гидромеханическом регуляторе (ГМР) с помощью датчиков ГМР измеряют положение РУД и параметры СУ в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ГМР, формируют управляющее воздействие ГМР, при исправном ЭР с помощью селектора отсекают управляющее воздействие ГМР, а управляющее воздействие ЭР подают на блок исполнительных элементов (ИЭ) и осуществляют управление двигателем, отличающийся тем, что дополнительно в автономном электронном блоке (ЭБ) с помощью датчиков ЭБ измеряют и контролируют частоту вращения ротора вентилятора двигателя и частоту вращения турбины вентилятора двигателя, в ГМР с помощью датчиков ГМР измеряют и контролируют частоту вращения ротора компрессора двигателя, если частота вращения ротора компрессора превышает наперед заданное значение, в ГМР формируют команду и с помощью селектора отсекают управляющее воздействие ЭР, а управляющее воздействие ГМР подают на ИЭ и осуществляют управление двигателем от ГМР, если рассогласование между частотой вращения ротора вентилятора и частотой вращения турбины вентилятора превышает наперед заданное значение, или ускорение турбины вентилятора превышает наперед заданное значение, или частота вращения турбины вентилятора превышает наперед заданное значение, с помощью ЭБ прекращают подачу топлива в камеру сгорания и выключают двигатель.
| SU 1090083 А1, 27.01.1996 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| SU 1625095 A1, 15.06.1994 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |
| ПО Г-СО ЮЗ НА Я | 0 |
|
SU306064A1 |

