Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ управления ГТД, реализованный в электронно-гидромеханической САУ супервизорного типа, Кеба И.В. «Летная эксплуатация вертолетных ГТД», М.: «Транспорт», 1976 г.
Способ заключается в том, что с целью повышения точности управления управляющее воздействие гидромеханического регулятора корректируется в ограниченном диапазоне электронным корректором.
Недостатком известного способа является его низкая эффективность.
Наиболее близким к данному изобретению по технической сущности является способ управления ГТД, реализованный, например, в электронно-гидромеханической САУ двигателя ТВ 7-117, входящего в силовую установку (СУ) самолета Ил-114, «Руководство по эксплуатации двигателя ТВ7-117С», ЛНПО им. В.Я.Климова, Ленинград, 1988 г.
САУ содержит двухканальный электронный регулятор (ЭР), резервный гидромеханический регулятор (ГМР), селектор и блок исполнительных элементов (ИЭ).
Способ заключается в том, что в каждом канале ЭР измеряют положение рычага (РУД) управления двигателем и параметры силовой установки (СУ), в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, в каждом канале ЭР формируют управляющие воздействия на дозатор расхода топлива и привод механизации компрессора, сравнивают управляющие воздействия между собой, и если разница превышает наперед заданное значение, определяемое расчетно-экспериментальным путем, формируют сигнал «Отказ ЭР» и переводят управление двигателем на резервный гидромеханический регулятор (ГМР).
Недостатком этого способа является следующее.
Из-за того что
- номенклатура датчиков ЭР и ГМР не совпадает;
- точностные характеристики датчиков ЭР лучше, чем у ГМР;
- законы управления, реализованные в ЭР и ГМР, отличаются по количеству и по качеству,
точность регулирования на ГМР ниже, чем на ЭР. Дополнительно при переводе управления двигателем на ГМР утрачивается ряд очень важных функций по защите двигателя, например защита компрессора от помпажа, защита турбины от перегрева, защита двигателя от раскрутки турбины винта (вентилятора).
Это приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата (ЛА).
Целью изобретения является повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
Поставленная цель достигается тем, что в способе контроля электронно-гидромеханической САУ ГТД с двухканальным ЭР, заключающемся в том, что в каждом канале ЭР измеряют положение РУД и параметры СУ, в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, в каждом канале ЭР формируют управляющие воздействия на дозатор расхода топлива и привод механизации компрессора, сравнивают управляющие воздействия между собой, и если разница превышает наперед заданное значение, определяемое расчетно-экспериментальным путем, формируют сигнал «Отказ ЭР» и переводят управление двигателем на ГМР, дополнительно после перевода управления двигателем на ГМР, в каждом канале ЭР по резервной программе управления, аналогичной реализованной в ГМР, формируют расчетное положение дозатора и привода, измеряют фактическое положение дозатора и привода, сравнивают расчетное положение и измеренное, в том канале ЭР, где рассогласование больше, формируют сигнал «Отказ канала ЭР», снимают сигнал «Отказ ЭР» и переводят управление двигателем на исправный канал ЭР.
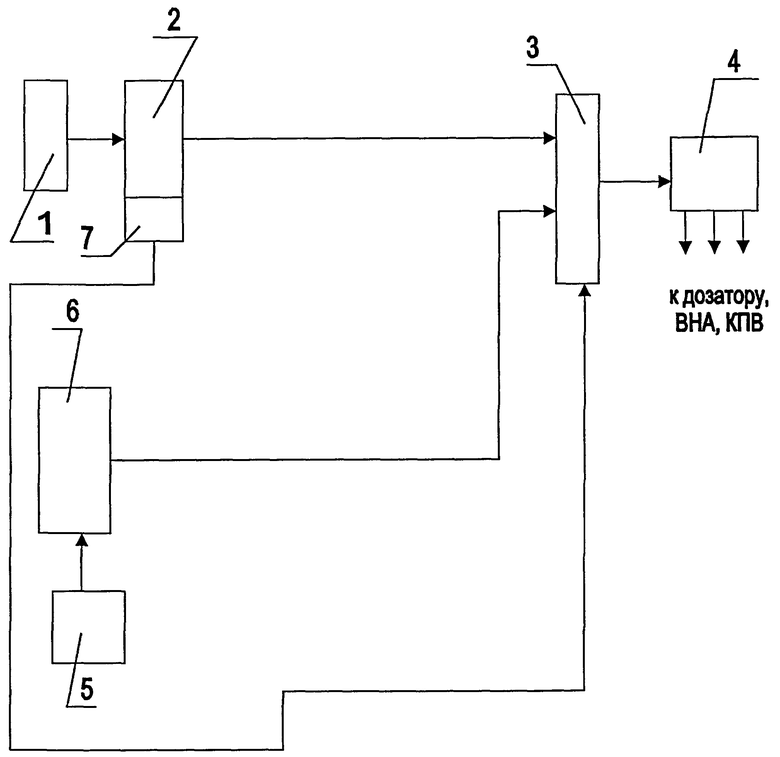
На чертеже представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные первый блок 1 датчиков (БД), двухканальный ЭР 2, селектор 3 «электроника - гидромеханика», блок 4 исполнительных элементов (ИЭ), последовательно соединенные второй БД 5 и ГМР 6, выход которого подключен к селектору 3, блок 7 встроенного контроля (БВК), выход которого подключен к управляемому входу селектора 3.
Устройство работает следующим образом. Каждый канал ЭР 2 по сигналам датчиков из БД1 по известным зависимостям формирует управляющие воздействия на дозатор расхода топлива и привод механизации компрессора.
В блоке 7 управляющие воздействия сравниваются между собой.
Полученная разница сравнивается с наперед заданной величиной, определяемой расчетным путем на этапе проектирования и изготовления САУ и уточняемой в процессе испытаний САУ на стенде-аналоге, двигателе и летающей лаборатории. Так, например, для САУ двигателя ПС-90А, входящего в состав СУ самолетов Ил-96-300, Ту-204, Ту-214, Ил-78ТД-90 ВД, эта величина составляет:
по контуру управления расходом топлива - 5% от диапазона;
по контуру управления механизацией - 7% от диапазона.
Если полученная разница меньше наперед заданной величины, на вход селектора 3 подаются управляющие воздействия первого канала ЭР 2. Селектор 3 находится в положении «электроника», управляющее воздействие подается на ИЭ 4, которые осуществляют требуемые изменения расхода топлива в камеру сгорания двигателя, положения лопаток входного направляющего аппарата (ВНА) компрессора и клапанов (КПВ) перепуска воздуха.
Если разница между управляющими воздействиями канала превышает наперед заданную величину, БВК 7 формирует сигнал «Отказ ЭР», по которому селектор 3 перекладывается в положение «гидромеханика», и переводит управление двигателем на ГМР 6, работающий со «своим» БД 5.
Одновременно с этим в каждом канале ЭР 2 по резервной программе управления, аналогичной реализованной в ГМР 6, формируют расчетное положение дозатора и привода, измеряют с помощью БД 1 фактическое положение дозатора и привода, сравнивают расчетное положение и измеренное, в том канале ЭР 2, где рассогласование больше, БВК 7 формирует сигнал «Отказ канала ЭР», снимает сигнал «Отказ ЭР» и селектор 3 переводит управление двигателем на исправный канал ЭР 2.
Таким образом, обеспечивается идентификация отказа в двухканальном ЭР с точностью до канала, что позволяет продолжить управление двигателем от ЭР, т.е. обеспечивается повышение качества работы САУ и, как следствие, повышение надежности ГТД и безопасности ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2661802C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387855C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2468229C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2417326C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2348824C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2345234C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Дополнительно после перевода управления двигателем на ГМР в каждом канале ЭР по резервной программе управления, аналогичной реализованной в ГМР, формируют расчетное положение дозатора и привода, измеряют фактическое положение дозатора и привода, сравнивают расчетное положение и измеренное, в том канале ЭР, где рассогласование больше, формируют сигнал «Отказ канала ЭР», снимают сигнал «Отказ ЭР» и переводят управление двигателем на исправный канал ЭР. Технический результат изобретения - повышение надежности работы двигателя и безопасности ЛА за счет идентификации отказа в двухканальном ЭР с точностью до канала. 1 ил.
Способ контроля электронно-гидромеханической САУ ГТД с двухканальным электронным регулятором (ЭР), заключающийся в том, что в каждом канале ЭР измеряют положение рычага (РУД) управления двигателем и параметры силовой установки (СУ), в зависимости от положения РУД и значения параметров СУ по законам управления, реализованным в ЭР, в каждом канале ЭР формируют управляющие воздействия на дозатор расхода топлива и привод механизации компрессора, сравнивают управляющие воздействия между собой и, если разница превышает наперед заданное значение, определяемое расчетно-экспериментальным путем, формируют сигнал «Отказ ЭР» и переводят управление двигателем на резервный гидромеханический регулятор (ГМР), отличающийся тем, что дополнительно после перевода управления двигателем на ГМР в каждом канале ЭР по резервной программе управления, аналогичной реализованной в ГМР, формируют расчетное положение дозатора и привода, измеряют фактическое положение дозатора и привода, сравнивают расчетное положение и измеренное, в том канале ЭР, где рассогласование больше, формируют сигнал «Отказ канала ЭР», снимают сигнал «Отказ ЭР» и переводят управление двигателем на исправный канал ЭР.
| SU 1625095 A1, 15.06.1994 | |||
| SU 1090083 A1, 27.01.1991 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2308605C2 |
| US 2006213200 А, 05.08.2008 | |||
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |

