Изобретение относится к устройствам для определения элементов воздушной навигации, в частности моделируемой угловой скорости артиллерийских снарядов, неподвижно помещенных внутри управляемого магнитного поля, путем изменения переменных магнитных величин с учетом магнитного поля Земли.
Уровень данной области техники характеризует устройство для магнитотерапии по патенту 2228208, A61N 2/02, 2002 г., которое по числу совпадающих существенных признаков выбрано в качестве наиболее близкого аналога.
Известное устройство посредством векторно-управляемого магнитного поля воздействует на обрабатываемый объект, размещенный внутри индуктора, содержащего три ортогональных контура, три усилителя мощности формируемых сигналов, три фазовых модулятора, три амплитудных модулятора, три генератора сигналов управляемой формы и частоты, связанных с блоком управления, позволяющих генерировать множество вариантов конфигурации магнитных полей, вектор суммарной напряженности которого изменяет в трехмерном пространстве свою траекторию, модуль и частоту вращения в соответствии с заданным законом управления.
Это достигается тем, что рабочий объем источника управляемого магнитного поля (индуктор) для обработки объекта в рабочем объеме, образованном тремя парами взаимно-ортогональных колец Гельмгольца, каждая из которых связана с соответствующим каналом источника тока, формирующим составляющие магнитного поля по координатам X, Y, Z.
Каждый канал источника тока, связанного с устройством управления, включает последовательно соединенные генератор сигналов формы и частоты, амплитудный модулятор и фазовый модулятор, автономно связанные с соответствующими блоками устройства управления, и усилитель мощности сигнала, подаваемого на каждую пару колец Гельмгольца.
Недостатком известного устройства является отсутствие обратной связи управления формируемых сигналов, что не позволяет автоматически изменять параметры воздействующего на объект магнитного поля по результатам фактически созданного самим устройством в процессе обработки магнитного поля.
Отсутствие средств регистрации характеристик формируемого магнитного поля не позволяет контролировать фактическое наличие структурных сигналов и его параметры, а также количественно регулировать их величину и направление. Последнее усугубляется тем, что в устройстве нет привязки к параметрам магнитного поля Земли, следовательно, невозможно компенсировать его вектор и величину.
Отмеченные недостатки приобретают решающее значение в случае моделирования направленно изменяющимся магнитным полем динамики полета артиллерийского снаряда, помещенного внутри индуктора для его обработки.
Задачей, на решение которой направлено настоящее изобретение, является усовершенствование известного индуктора с контролируемым изменением параметров магнитного поля, моделирующего навигационную информацию, максимально приближенную к существующей на траектории реального полета.
Требуемый технический результат достигается тем, что в известном индукторе управляемого магнитного поля для обработки объекта, помещенного в рабочем объеме, образованном тремя парами взаимноортогональных колец Гельмгольца, каждая из которых связана с соответствующим каналом источника тока, формирующим составляющие магнитного поля по координатам X, Y, Z, при этом каналы источника тока включают последовательно соединенные генератор сигналов формы и частоты, амплитудный модулятор и фазовый модулятор, автономно связанные с соответствующими блоками устройства управления, и усилитель мощности сигнала, подаваемого на каждую пару колец Гельмгольца, согласно изобретению обрабатываемый объект содержит блок магнитометрических датчиков, связанный с формирователем команд, подаваемых на регистратор, связанный с трехканальным измерительным датчиком, и на программно-вычислительное устройство, дополнительно установленное перед устройством управления, а канальные усилители мощности сигналов связаны с кольцами Гельмгольца через сумматоры, оснащенные регулируемым двуполярным источником постоянного тока.
Отличительные признаки обеспечили автоматическое управление текущими параметрами изменяющегося магнитного поля, в котором размещен обрабатываемый (исследуемый) объект - артиллерийский снаряд, в соответствии с реальным заданием траектории полета в привязке к местности.
В изобретении используется принцип относительности: вокруг неподвижного снаряда, установленного внутри индуктора, вращают формируемое магнитное поле, параметры которого соответствуют реальному магнитному полю Земли вдоль траектории полета.
Магнитное поле в индукторе изменяется согласно заданию с программно-вычислительного устройства, адаптированного через формирователь команд к информации с магнитометрических датчиков, которыми оснащен исследуемый снаряд, и вырабатывающего кодированные сигналы текущих координат траектории полета снаряда на устройство управления, ликвидирующее рассогласования по трем каналам.
Устройство управления дифференцирует уровень сигналов по каналам источника питания, на их структурные элементы, формирующие требуемые изменения параметров магнитного поля в индукторе.
Регистратор обеспечивает наглядную информацию о фактических изменениях текущих параметров магнитного поля в индукторе посредством трехканального измерительного датчика, размещенного внутри индуктора.
Связанные с регулируемыми двуполярными источниками тока сумматоры, установленные в каждом канале источника тока между усилителями мощности сигналов и соответствующими парами колец Гельмгольца, обеспечивают компенсацию магнитного поля Земли в системе обратной связи управляющих команд функционирования индуктора. Это позволяет получить практически истинные значения параметров полета артиллерийского снаряда по реальной траектории без стрельбы.
Следовательно, каждый существенный признак необходим, а их совокупность в устойчивой взаимосвязи являются достаточными для достижения новизны качества, неприсущего признакам в разобщенности, то есть техническая задача решается не суммой эффектов, а новым сверхэффектом суммы существенных признаков.
Сущность изобретения поясняется чертежом, на котором схематично изображено предлагаемое устройство - стенд для моделирования полета артиллерийских снарядов на заданной траектории к цели.
Испытательный стенд включает индуктор 1, образованный пространственной системой их трех пар взаимноортогональных колец Гельмгольца, автономно подключенных через сумматоры 2, 3, 4 к каналам координат X, Y, Z источника тока.
Вторые входы сумматоров 2, 3, 4 связаны с регулируемыми двуполярными источниками постоянного тока соответственно 5, 6, 7, предназначенными для компенсации магнитного поля Земли на месте установки индуктора.
Каналы источника тока, питающего индуктор 1, включают последовательно соединенные усилители 8, 9, 10 мощности сигнала, связанные соответственно с сумматорами 2, 3, 4, и далее фазовые модуляторы 11, 12, 13, амплитудные модуляторы 14, 15, 16, генераторы формы и частоты 17, 18, 19.
Управляющие входы всех структурных элементов трех каналов источника тока подключены к блокам 20, 21, 22 и 23 устройства 24 управления, соответственно расчета фазы, амплитуды, частоты и формы сигнала.
Входы блоков 20, 21, 22 и 23 подсоединены к программно-вычислительному устройству 25 расчета параметров траектории движения снаряда.
Программно-вычислительное устройство 25 соединено с блоком 26 ввода данных и запуска, испытуемым снарядом 27 и регистратором 28, которое связано с трехканальным измерительным датчиком 29, размещенным внутри индуктора 1, в непосредственной близости от снаряда 27.
Испытуемый снаряд 27, помещенный в рабочем объеме индуктора 1, оснащен блоком 30 магнитометрических датчиков, которые подключены к формирователю 31 команд, связанному с исполнительным устройством 32, регистратором 28 и с программно-вычислительным устройством 25.
Функционирует предложенный испытательный стенд следующим образом.
При включении блока 26 с помощью установленного в рабочем объеме индуктора 1 трехканального измерительного датчика 29 измеряются координатные составляющие окружающего магнитного поля Земли, где установлен предложенный испытательный стенд.
Затем посредством двуполярных стабилизированных источников 5, 6, 7 постоянного тока в каждой паре колец Гельмгольца индуктора 1 вручную задают соответствующие величину и направление токов в каждом канале. При этом в индукторе 1 создается постоянное магнитное поле, вектор напряженности которого равен по величине и противоположен по направлению окружающему магнитному полю, в результате чего происходит его компенсация.
Далее посредством блока 26 в программно-вычислительное устройство 25 параметров траектории движения снаряда (баллистический вычислитель) вводятся исходные данные: тип снаряда, тип взрывчатого наполнения, параметры орудийной системы, метеоданные, параметры стрельбы, которое рассчитывает начальные параметры пространственной ориентации снаряда (три угла Эйлера и три координаты X, Y, Z центра масс снаряда), скорости вращения вокруг собственной оси и выдает эти данные на блоки 20, 21, 22 и 23 устройства 24 управления, для расчета соответственно фазы, амплитуды, формы и частоты сигналов, параллельно подаваемых на фазовые модуляторы 11, 12, 13, амплитудные модуляторы 14, 15, 16 и генераторы 17, 18, 19 для управления частотой и формой сигналов в каналах X, Y, Z.
С канальных фазовых модуляторов 11, 12, 13 сформированные сигналы поступают соответственно на канальные усилители мощности 8, 9, 10 и далее на сумматоры 2, 3, 4, в которых происходит алгебраическое сложение токов от канальных двуполярных стабилизированных источников 5, 6, 7 постоянного тока и канальных усилителей 8, 9, 10 мощности.
Сформированные сигналы с канальных сумматоров 2, 3, 4 поступают в индуктор 1, на соответствующую пару его колец Гельмгольца, и создают в рабочем объеме результирующую напряженность магнитного поля, величина и направление вектора которой определяется величинами и направлениями токов, протекающих по кольцам индуктора 1.
Таким образом, на магнитометрические датчики блока 30, установленные в испытуемом снаряде, и измерительный датчик 29 воздействует сформированное магнитное поле, соответствующее пространственному положению изделия при выстреле.
Далее сигналы с магнитометрических датчиков блока 30 поступают в формирователь 31, где в соответствии с заложенным алгоритмом обработки сигналов и полетным заданием для данного конкретного выстрела вырабатываются команды, которые одновременно подаются на исполнительное устройство 32 снаряда, регистратор 28 и программно-вычислительное устройство 25 для расчета параметров траектории движения снаряда 27 на траектории.
Программно-вычислительное устройство 25 с учетом текущего времени и выработанных команд формирователем 31 рассчитывает параметры пространственной ориентации снаряда 27 и выдает эти данные в устройство 24 управления для автоматической обработки сигналов в координатных каналах для коррекции токов в обмотках индуктора 1, дискретного изменения магнитного поля в его рабочем объеме, моделирующего движение снаряда 27 по траектории полета к цели.
Связь снаряда 27, размещенного в индукторе 1, с программно-вычислительным устройством 25, связанным с устройством 24 управления, изменяет параметры магнитного поля в индукторе 1 в соответствии с заданной траекторией движения снаряда 27. При этом в индукторе 1 создается магнитное поле, по своим параметрам близкое к тому, которое действует на снаряд 27 при реальном его движении по траектории полета при выстреле, что обеспечивает его статичное моделирование на стенде.
Скорость вращения артиллерийского снаряда вокруг его продольной оси измеряют посредством подсчета числа оборотов в единицу времени посредством магнитометра, в котором при пересечении силовых линий магнитного поля Земли возникает переменная по величине и полярности ЭДС, в форме периодического импульсного сигнала, однозначно характеризующего линейную скорость, получаемую снарядом при выстреле.
Параметры пространственной ориентации снаряда на полете определяют с помощью феррозондовых датчиков, которые измеряют не только величину напряженности магнитного поля, но и направление вектора магнитного поля.
В предложенном стенде используется зависимость между взаимным расположением вектора напряженности окружающего магнитного поля индуктора 1 и уровнем сигналов блока 30 магнитометрических датчиков для расчета параметров пространственной ориентации и местоположения снаряда на траектории и формирования управляющих команд на исполнительные устройства 32 пилотирования изделия.
Сигналы с измерительного датчика 29 и формирователя 31 поступают в регистратор 28, где записываются в едином масштабе времени.
Проведенный сопоставительный анализ предложенного технического решения с выявленными аналогами уровня техники, из которого изобретение явным образом не следует для специалиста по боеприпасам, показал, что оно не известно, а с учетом возможности промышленного изготовления предложенного стенда для моделирования артиллерийских выстрелов, можно сделать вывод о соответствии критериям патентоспособности.
При использовании предложенного стенда многократно сокращается количество натурных испытаний снарядов стрельбой, необходимых для проверки правильности заложенных конструктивных решений во вновь разрабатываемых изделиях, а также полигонных испытаний. В стенде по изобретению возможно одно изделие испытывать в различных условиях движения по различным траекториям, с регистрацией реакции бортовой аппаратуры на изменяющееся информационное магнитное поле, и выявлять динамические характеристики конструкции до передачи изделия в эксплуатацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВЛИЯНИЯ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ НА БИОЛОГИЧЕСКИЕ ОБЪЕКТЫ | 2008 |
|
RU2454675C2 |
| УСТРОЙСТВО ДЛЯ МАГНИТОТЕРАПИИ | 2002 |
|
RU2228208C2 |
| АРТИЛЛЕРИЙСКИЙ БОЕПРИПАС | 2006 |
|
RU2310154C1 |
| Датчик магнитометра | 1976 |
|
SU661450A1 |
| Боевой элемент с координатором цели | 2016 |
|
RU2634875C1 |
| Самоприцеливающийся боевой элемент | 2016 |
|
RU2652771C2 |
| Система коррекции траектории вращающегося артиллерийского снаряда | 2024 |
|
RU2838369C1 |
| Градиентометр | 1977 |
|
SU737893A1 |
| АРТИЛЛЕРИЙСКИЙ СНАРЯД С СИСТЕМОЙ УПРАВЛЕНИЯ ДИСТАНЦИОННОГО ПОДРЫВА | 2022 |
|
RU2797820C1 |
| Способ коррекции времени срабатывания дистанционного взрывателя артиллерийского снаряда | 2019 |
|
RU2698890C1 |
Изобретение относится к устройствам для определения элементов воздушной навигации, в частности моделируемой угловой скорости артиллерийских снарядов. Индуктор управляемого магнитного поля для обработки объекта, помещенного в рабочем объеме, образованном тремя парами взаимноортогональных колец Гельмгольца, каждая из которых связана с соответствующим каналом источника тока, формирующим составляющие магнитного поля по координатам X, Y, Z. Характеризуется тем, что каналы источника тока включают последовательно соединенные генератор сигналов формы и частоты, амплитудный модулятор и фазовый модулятор, автономно связанные с соответствующими блоками устройства управления, и усилитель мощности сигнала, подаваемого на каждую пару колец Гельмгольца. Причем обрабатываемый объект содержит блок магнитометрических датчиков, связанный с формирователем команд, подаваемых на регистратор, связанный с трехканальным измерительным датчиком, и на программно-вычислительное устройство, дополнительно установленное перед устройством управления, а канальные усилители мощности сигналов связаны с кольцами Гельмгольца через сумматоры, оснащенные регулируемым двуполярным источником постоянного тока. Технический результат направлен на усовершенствование индуктора с контролируемым изменением параметров магнитного поля. 1 ил.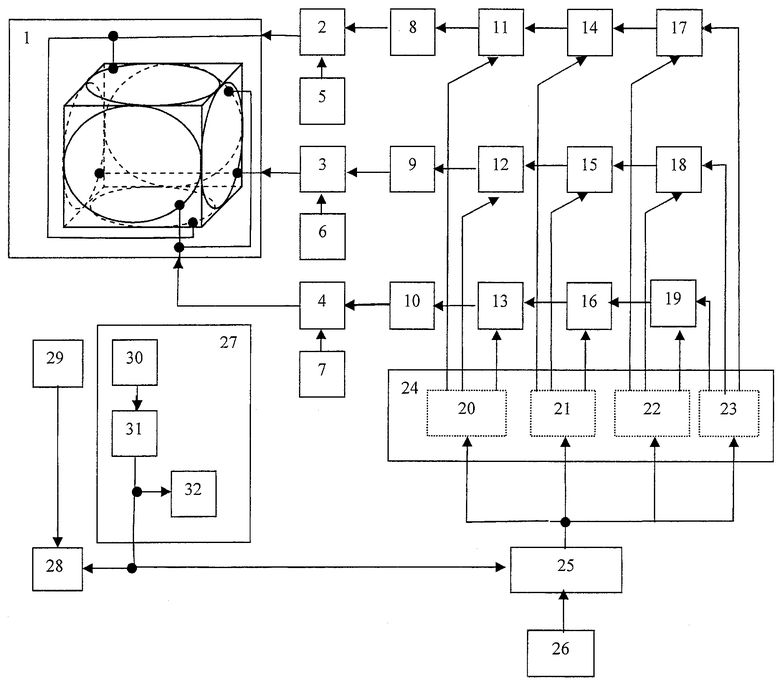
Индуктор управляемого магнитного поля для обработки объекта, помещенного в рабочем объеме, образованном тремя парами взаимно ортогональных колец Гельмгольца, каждая из которых связана с соответствующим каналом источника тока, формирующим составляющие магнитного поля по координатам X, Y, Z, при этом каналы источника тока включают последовательно соединенные генератор сигналов формы и частоты, амплитудный модулятор и фазовый модулятор, автономно связанные с соответствующими блоками устройства управления, и усилитель мощности сигнала, подаваемого на каждую пару колец Гельмгольца, отличающийся тем, что обрабатываемый объект содержит блок магнитометрических датчиков, связанный с формирователем команд, подаваемых на регистратор, связанный с трехканальным измерительным датчиком, и на программно-вычислительное устройство, дополнительно установленное перед устройством управления, а канальные усилители мощности сигналов связаны с кольцами Гельмгольца через сумматоры, оснащенные регулируемым двуполярным источником постоянного тока.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| УСТРОЙСТВО ДЛЯ МАГНИТОТЕРАПИИ | 2002 |
|
RU2228208C2 |
| WO 9958933 A, 18.11.1999. | |||

