Предлагаемое изобретение относится к области измерительной техники и может быть использовано в магнитной навигации для определения координат и вектора скорости источника магнитного поля с целью предотвращения его столкновения с объектом, являющимся носителем средств измерения параметров магнитного поля, в сейсмических системах определения эпицентра и активности землетрясения для проведения исследований возможности предсказания землетрясения.
Известно устройство для определения координат источника магнитного поля, реализующее способ определения координат и магнитного момента дипольного источника поля по измеренным параметрам магнитного поля в каждой из выбранных точек пространства [1]. Известное устройство состоит из трех трехкомпонентных магнитометрических датчиков, трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, а первые выходы подключены к соответствующим первым входам этих датчиков, трех генераторов переменной ЭДС, первые выходы которых подключены к вторым входам соответствующих трехкомпонентных датчиков, а вторые выходы подключены к вторым входам соответствующих усилительно-преобразовательных блоков, вычислительного блока, вход которого подключен к вторым выходам усилительно-преобразовательных блоков, а выход подключен к третьим входам датчиков, и источника магнитного поля. При этом каждый усилительно-преобразовательный блок состоит из трех каналов, каждый из которых содержит избирательный усилитель и синхронный детектор. Электрически связанные между собой трехкомпонентный датчик, усилительно-преобразовательный блок и генератор переменной ЭДС образуют электронный блок, поэтому известное устройство содержит три электронных блока.
Известное устройство [1] работает следующим образом. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные напряжения, перемагничивающие магниточувствительные элементы этих датчиков. В результате этого на выходе каждого из датчиков появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех составляющих магнитного поля, созданного источником магнитного поля и внешним однородным магнитным полем, в частности геомагнитным полем [2]. Выходные сигналы с датчиков усиливаются и детектируются соответствующими усилительно-преобразовательными блоками, поэтому выходные сигналы с каждого усилительно-преобразовательного блока пропорциональны трем составляющим вектора магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменной ЭДС. Выходные сигналы с первых выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих трехкомпонентных датчиков, обеспечивая отрицательную обратную связь по измеренным составляющим векторов магнитной индукции. Выходные сигналы с усилительно-преобразовательных блоков подаются на входы вычислительного блока. В вычислительном блоке осуществляется определение составляющих однородного магнитного поля и координат источника магнитного поля. Сигналы, пропорциональные составляющим вектора однородного магнитного поля, поступают с выходов вычислительного блока на соответствующий датчик, осуществляя компенсацию однородного магнитного поля в объеме каждого датчика.
Однако известное техническое решение [1] в ряде случаев не обеспечивает однозначности определения координат источника магнитного поля [3]. Кроме того, определение координат источника магнитного поля осуществляется в системе координат, жестко связанной с датчиками. Следовательно, одинаковое изменение только ориентации датчиков при неизменном местоположении источника магнитного поля будет приводить к изменению координат, в частности проекций радиус-вектора источника магнитного поля на оси системы координат.
Известно устройство для определения координат источника, магнитного поля [4, второй вариант], которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из источника магнитного поля, размещенного на объекте, четырех трехкомпонентных магнитометрических датчиков, размещенных в вершинах тетраэдра, двенадцати усилительно-преобразовательных блоков, выходы которых являются выходами устройства, и генератора переменных напряжений. Первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к соответствующим выходам первого трехкомпонентного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к соответствующим выходам второго трехкомпонентного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к соответствующим выходам третьего трехкомпонентного датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к соответствующим выходам четвертого трехкомпонентного датчика, первый выход генератора переменных напряжений подключен к входам четырех трехкомпонентных датчиков, а второй выход - к вторым входам двенадцати усилительно-преобразовательных блоков.
Известное устройство [4] работает следующим образом. На первые входы четырех датчиков подается с генератора переменных напряжений напряжение, перемагничивающее магниточувствительные элементы датчиков, например феррозондовых датчиков. В результате этого на выходах каждого датчика появляются три ЭДС вторых гармоник, пропорциональные проекциям векторов магнитной индукции на магнитные оси датчиков, созданной источником магнитного поля [2]. Выходные сигналы с датчиков усиливаются и детектируются соответствующими усилительно-преобразовательными блоками. Для детектирования сигналов на вторые входы усилительно-преобразовательных блоков подается переменное напряжение с генератора. На выходах усилительно-преобразовательных блоков будут сигналы соответствующих полярностей, пропорциональные значениям проекций векторов магнитной индукции, созданной источником магнитного поля. По измеренным проекциям векторов магнитной индукции, пропорциональных сигналам на выходах усилительно-преобразовательных блоков, и известным координатам, например, второго, третьего и четвертого датчиков относительно первого датчика осуществляется определение координат источника магнитного поля по алгоритму, изложенному в работе [5].
Известное техническое решение [4] обеспечивает определение координат источника магнитного поля в случае, если внешнее однородное магнитное поле, в частности геомагнитное поле, известно или известны некоторые магнитные параметры источника магнитного поля. При отсутствии каких-либо сведений о местоположении и магнитных параметрах источника магнитного поля известное техническое решение [4], как и техническое решение [1], принятое за прототип, не обеспечивает однозначности определения координат источника магнитного поля. Кроме того, определение координат источника магнитного поля осуществляется в системе координат, жестко связанной с датчиками. Следовательно, одинаковое изменение ориентации датчиков при неизменных местоположениях источника магнитного поля и, например, одного из датчиков будет приводить к изменению координат, в частности проекций радиус-вектора источника магнитного поля на оси этого датчика. В известном устройстве [4] трехкомпонентные датчики могут быть разнесены на десятки метров, что приведет к увеличению мощности генератора переменных напряжений на потери при электрических цепях, связывающих генератор с датчиками.
Задачей предлагаемого изобретения является создание устройства, обеспечивающего однозначное определение координат источника магнитного поля в опорной системе координат в условиях внешнего однородного магнитного поля, в частности геомагнитного поля, при отсутствии каких-либо сведений о внешнем магнитном поле и магнитных параметрах источника магнитного поля. Поставленная задача решается за счет пространственного размещения трехкомпонентных магнитометрических датчиков и измерении в выбранной опорной системе координат углового положения объекта с размещенными на нем датчиками синхронно с измерением векторов магнитной индукции.
Предлагаемое устройство для определения координат источника магнитного поля с подвижного объекта, включающее четыре трехкомпонентных магнитометрических датчика, генератор переменных напряжений и двенадцать усилительно-преобразовательных блоков, первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к соответствующим выходам первого трехкомпонентного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к соответствующим выходам второго трехкомпонентного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к соответствующим выходам третьего трехкомпонентного датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к соответствующим выходам четвертого трехкомпонентного датчика, первый выход генератора переменных напряжений подключен к первому входу первого трехкомпонентного датчика, а второй выход - к вторым входам первого, второго и третьего усилительно-преобразовательных блоков, снабжено вторым, третьим и четвертым генераторами переменных напряжений, углоизмерительным устройством, регистрирующим блоком, выполненным с возможностью синхронной регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта и устройством обработки информации, вход которого подключен к выходу регистрирующего блока, первые выходы усилительно-преобразовательных блоков и три выхода углоизмерительного устройства подключены к соответствующим входам регистрирующего блока, первый выход второго генератора переменных напряжений подключен к первому входу второго трехкомпонентного датчика, а второй выход - к вторым входам четвертого, пятого и шестого усилительно-преобразовательных блоков, первый выход третьего генератора переменных напряжений подключен к первому входу третьего трехкомпонентного датчика, а второй выход - к вторым входам седьмого, восьмого и девятого усилительно-преобразовательных блоков, первый выход четвертого генератора переменных напряжений подключен к первому входу четвертого трехкомпонентного датчика, а второй выход - к вторым входам десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков, вторые выходы первого, второго и третьего усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам первого трехкомпонентного датчика, вторые выходы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам второго трехкомпонентного датчика, вторые выходы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам третьего трехкомпонентного датчика, вторые выходы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам четвертого трехкомпонентного датчика, при этом первый и второй трехкомпонентные датчики размещены на одной оси, третий и четвертый трехкомпонентные датчика размещены на второй оси и симметрично первой оси, а первый и второй трехкомпонентные датчики установлены симметрично упомянутой второй оси, первый и второй трехкомпонентные датчики установлены друг от друга на расстояние, отличное от расстояния между третьим и четвертым трехкомпонентными датчиками, четыре трехкомпонентных датчика, четыре генератора переменных напряжений, двенадцать усилительно-преобразовательных блоков, регистрирующий блок, углоизмерительное устройство и устройство обработки информации размещены на подвижном объекте.
Применение в предлагаемом техническом решении расположенных на подвижном объекте четырех трехкомпонентных магнитометрических датчиков, четырех генераторов переменных напряжений, двенадцати усилительно-преобразовательных блоков, углоизмерительного устройства, регистрирующего блока и устройства обработки информации, размещенных и включенных между собой определенным образом, обеспечивает однозначное определение координат источника магнитного поля в выбранной опорной системе координат при отсутствии и наличии внешнего однородного магнитного поля и отсутствия каких-либо сведений об источнике магнитного поля.
Таким образом, технический результат предлагаемого устройства выражается в однозначности определения координат источника магнитного поля с подвижного объекта в выбранной опорной системе координат как при отсутствии, так и при наличии внешнего однородного магнитного поля и при отсутствии каких-либо сведений о местоположении и магнитных параметрах источника магнитного поля.
Сущность предлагаемого технического решения поясняется следующими графическими материалами.
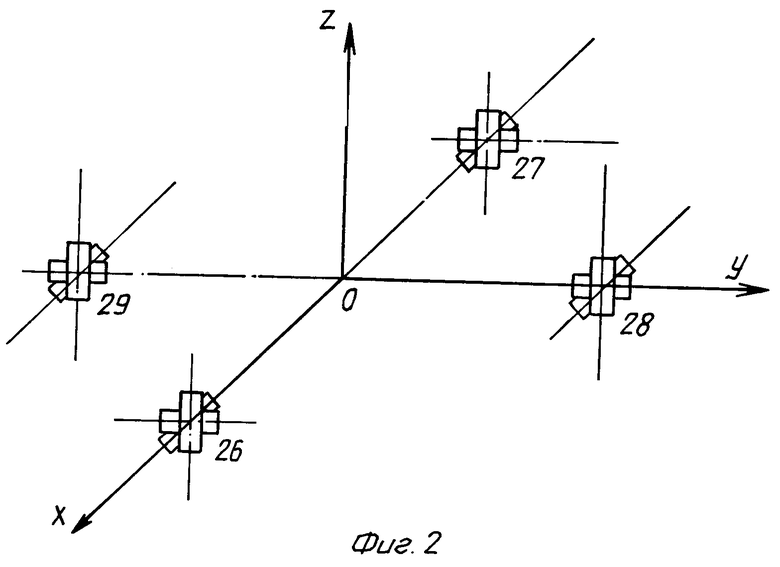
На фиг. 1 изображена структурная схема устройства для определения координат источника магнитного поля с подвижного объекта.
На фиг.2 изображено пространственное расположение трехкомпонентных магнитометрических датчиков в декартовой системе координат.
Предлагаемое устройство для определения координат источника магнитного поля с подвижного объекта состоит (фиг.1) из четырех трехкомпонентных магнитометрических датчиков 1-4, двенадцати усилительно-преобразовательных блоков 5-16, четырех генераторов переменных напряжений 17-20, регистрирующего блока 21, углоизмерительного устройства 22, устройства обработки информации 23, подвижного объекта 24, на котором расположены датчики 1-4, блоки 5-16, 21, генераторы 17-20, устройства 21 и 23, определяющие координаты источника магнитного поля 25. Первые входы блоков 5-7 подключены к соответствующим выходам датчика 1, первые входы блоков 8-10 подключены к соответствующим выходам датчика 2, первые входы блоков 11-13 подключены к соответствующим выходам датчика 3, первые входы блоков 14-16 подключены к соответствующим выходам датчика 4. Первый выход генератора 17 подключен к первому входу датчика 1, а второй выход - к вторым входам блоков 5-7, первый выход генератора 18 подключен к первому входу датчика 2, а второй выход - к вторым входам блоков 8-10, первый выход генератора 19 подключен к первому входу датчика 3, а второй выход - к вторым входам блоков 11-13, первый выход генератора 20 подключен к первому входу датчика 4, а второй выход - к вторым входам блоков 14-16. Первые выходы блоков 5-16 и выходы устройства 22 подключены к соответствующим входам блока 21, выход которого подключен к входу устройства 24. Вторые выходы блоков 5-7 подключены соответственно к второму, третьему и четвертому входам датчика 1, вторые выходы блоков 8-10 подключены соответственно к второму, третьему и четвертому входам датчика 2, вторые выходы блоков 11-13 подключены соответственно к второму, третьему и четвертому входам датчика 3, вторые выходы блоков 14-16 подключены соответственно к второму, третьему и четвертому входам датчика 4. Первая пара трехкомпонентных магнитометрических датчиков 26 и 27 (фиг.2) размещена на оси ОХ декартовой системы координат ОХУZ симметрично относительно оси ОУ, а вторая пара трехкомпонентных магнитометрических датчиков 28 и 29 размещена на оси ОУ симметрично относительно оси ОХ.
Предлагаемое устройство для определения координат источника магнитного поля с подвижного объекта работает следующим образом. На первые входы датчиков 1-4 (фиг. 1), например феррозондов, подаются с соответствующих генераторов 17-20 переменные напряжения частотой f, перемагничивающие магниточувствительные элементы датчиков 1-4. В результате этого на трех выходах каждого из датчиков 1-4 появляются три ЭДС вторых гармоник, пропорциональные проекциям векторов магнитной индукции, созданной источником 25 и внешним однородным магнитным полем, на магнитные оси упомянутых датчиков [2]. Эти ЭДС усиливаются и детектируются блоками 5-16, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 5-16 подаются опорные напряжения частотой 2f с вторых выходов соответствующих генераторов 17-20, а на первые входы этих блоков подаются с соответствующих выходов датчиков 1-4 переменные ЭДС частотой 2f. На второй, третий и четвертый входы датчика 1 подаются продетектированные сигналы с вторых выходов соответствующих блоков 5-7, на второй, третий и четвертый входы датчика 2 подаются продетектированные сигналы с вторых выходов соответствующих блоков 8-10, на второй, третий и четвертый входы датчика 3 подаются продетектированные сигналы с вторых выходов соответствующих блоков 11-13, на второй, третий и четвертый входы датчика 4 подаются продетектированные сигналы с вторых выходов соответствующих блоков 14-16. Сигналы, приходящие на вторые, третьи и четвертые входы датчиков 1-4 с выходов соответствующих блоков 5-16, обеспечивают отрицательную обратную связь по измеряемым сигналам [2] . На входы блока 21 поступают сигналы с первых выходов блоков 5-16, пропорциональные значениям проекций векторов магнитного индукции, и сигналы с выходов устройства 22, пропорциональные углам курса, крена, тангажа объекта 24. При этом сигналы на выходах блоков 5-16 пропорциональны проекциям магнитной индукции внешнего однородного магнитного поля, например геомагнитного поля, и магнитной индукции, созданной источником магнитного поля 25. Блок 21 обеспечивает синхронную регистрацию сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта 24, и передачу их на устройство 23. При коллинеарных осях датчиков 1-4 устройство 23 определяет приближенные значения пространственных производных, характеризующих тензор второго ранга вектора магнитной индукции, созданной источником магнитного поля, из следующих выражений:
где  - вектор магнитной индукции и его проекции на оси датчика 1, измеренные в месте размещения этого датчика;
- вектор магнитной индукции и его проекции на оси датчика 1, измеренные в месте размещения этого датчика;  - вектор магнитной индукции и его проекции на оси датчика 2, измеренные в месте размещения этого датчика;
- вектор магнитной индукции и его проекции на оси датчика 2, измеренные в месте размещения этого датчика;  - вектор магнитной индукции и его проекции на оси датчика 3, измеренные в месте размещения этого датчика;
- вектор магнитной индукции и его проекции на оси датчика 3, измеренные в месте размещения этого датчика;  - вектор магнитной индукции и его проекции на оси датчика 4, измеренные в месте размещения этого датчика; (а1, 0, 0), (а2, 0, 0), (0, b3, 0), (0, b4, 0) - координаты соответствующих датчиков 26-29 (фиг. 2) в декартовой системе координат ОХУZ, жестко связанной с объектом, оси которой коллинеарны осям датчиков 26-29; а1 = -а2, b3 = -b4, a1 ≠ b3; (Вх1, Ву1, Вz1), (Вх2, Ву2, Вz2), (Вх3, Ву3, Вz3), (Вх4, Ву4, Вz4) - проекции векторов магнитной индукции, созданные источником магнитного поля в соответствующих местах размещения датчиков 1-4; Вхо, Вуо, Вzo - проекции вектора индукции геомагнитного поля.
- вектор магнитной индукции и его проекции на оси датчика 4, измеренные в месте размещения этого датчика; (а1, 0, 0), (а2, 0, 0), (0, b3, 0), (0, b4, 0) - координаты соответствующих датчиков 26-29 (фиг. 2) в декартовой системе координат ОХУZ, жестко связанной с объектом, оси которой коллинеарны осям датчиков 26-29; а1 = -а2, b3 = -b4, a1 ≠ b3; (Вх1, Ву1, Вz1), (Вх2, Ву2, Вz2), (Вх3, Ву3, Вz3), (Вх4, Ву4, Вz4) - проекции векторов магнитной индукции, созданные источником магнитного поля в соответствующих местах размещения датчиков 1-4; Вхо, Вуо, Вzo - проекции вектора индукции геомагнитного поля.
Приняв 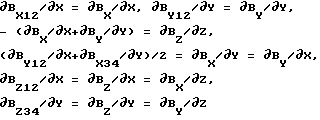 , получим симметричную матрицу D, у которой сумма элементов главной диагонали равна нулю, где
, получим симметричную матрицу D, у которой сумма элементов главной диагонали равна нулю, где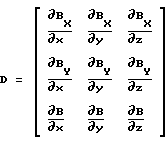 .
.
Элементы матрицы D есть пространственные производные вектора магнитной индукции, характеризующие тензор второго ранга вектора магнитной индукции источника 25 (фиг.1).
Устройством 23 (фиг.1) осуществляется определение собственных значений λ1, λ2, λ3 и собственных векторов  матрицы D [6], а по λ1, λ2, λ3 и
матрицы D [6], а по λ1, λ2, λ3 и  - определение с точностью до четырех направлений единичного радиуса-вектора источника магнитного поля 25 из следующего выражения [7]:
- определение с точностью до четырех направлений единичного радиуса-вектора источника магнитного поля 25 из следующего выражения [7]:
где i = 1, 2, 3, 4 - номер единичного радиус-вектора источника магнитного поля.
На расстояниях, превышающих линейные размеры источника магнитного поля, реальное магнитное поле этого источника аппроксимируют магнитным полем диполя [8]. В таком случае векторы магнитной индукции  измеренные в местах размещения датчиков 26-29 (фиг.2), можно представить в виде следующих уравнений:
измеренные в местах размещения датчиков 26-29 (фиг.2), можно представить в виде следующих уравнений: 
 , где
, где
μo = 4π•10-7 Гн/м; r1 = [(х-а1)2+у2+z2]1/2; r2 = [(x+a1)2+y2+z2]1/2; r3 = [x2+(у-b3)2+z2]1/2; r4 = [x2+(у+b3)2+z2]1/2;  - радиус-вектор источника магнитного поля; х, у, z - координаты источника магнитного поля в системе координат ОХУZ;
- радиус-вектор источника магнитного поля; х, у, z - координаты источника магнитного поля в системе координат ОХУZ;  - вектор магнитного момента источника магнитного поля;
- вектор магнитного момента источника магнитного поля;  - вектор индукции геомагнитного поля (внешнего однородного магнитного поля).
- вектор индукции геомагнитного поля (внешнего однородного магнитного поля).
Решение задачи определения х, у, z устройством 23 (фиг.1) осуществляется итерационным методом, в частности методом поиска [6], следующим образом. На каждом из четырех радиус-векторов  задают по точке пространства, равноудаленные от начала координат, принимая их координаты за начальные приближения источника магнитного поля, и по две дополнительные точки пространства, расположенные на одинаковых расстояниях и симметрично относительно соответствующей точки начального приближения (центральной точки). Подставляя координаты заданных точек пространства в выражения элементов матриц А1, А2, А3, А4, получают приближения этих матриц. Так, например, при начальном приближении х1 (0), y1 (0), z1 (0), взятом на направлении
задают по точке пространства, равноудаленные от начала координат, принимая их координаты за начальные приближения источника магнитного поля, и по две дополнительные точки пространства, расположенные на одинаковых расстояниях и симметрично относительно соответствующей точки начального приближения (центральной точки). Подставляя координаты заданных точек пространства в выражения элементов матриц А1, А2, А3, А4, получают приближения этих матриц. Так, например, при начальном приближении х1 (0), y1 (0), z1 (0), взятом на направлении  , получают уравнение
, получают уравнение
из которого определяют приближенное значение вектора магнитного момента  , где
, где  .
.
Подставляя  и х1 (0), y1 (0), z1 (0) в правые части уравнений для
и х1 (0), y1 (0), z1 (0) в правые части уравнений для  и
и  где
где  и
и  , определяют начальные приближения
, определяют начальные приближения  и
и  . Затем находят функцию
. Затем находят функцию
Аналогично определяют функции F12 (0) и F13 (0) для дополнительных точек пространства на направлении  , а также F21, F22, F23 на направлении
, а также F21, F22, F23 на направлении  , F31, F32, F33 на направлении
, F31, F32, F33 на направлении  и F41, F42, F43 на направлении
и F41, F42, F43 на направлении  . Из всех Fij (0) где j - номера, соответствующие центральным и дополнительным точкам пространства, выбирают функцию с наименьшим значением и, если этой функции соответствует дополнительная точка пространства, она принимается за центральную, а относительно ее задают две дополнительные точки пространства с предыдущим шагом итерации и вновь осуществляют определение Fij (1) уже на выбранном направлении, то есть при i = const. Если наименьшей функции Fij (t), где t = 0, 1, 2, 3,... номера итераций, соответствует центральная точка пространства, то для последующей итерации она остается центральной, но относительно ее задают две дополнительные точки пространства с меньшим шагом, например уменьшенным в два раза. Поиск прекращается при минимальном Fij (t) из трех значений при шаге итерации, равном или меньшем установленной невязке εr. Полученные в этом случае координаты х, у, z источника магнитного поля в системе координат ОХУZ, жестко связанной с датчиками (с объектом), принимают за действительные. Значения координат х', у', z' источника магнитного поля в выбранной опорной системе координат, например геомагнитной системе координат, отделяют устройством 23 (фиг.1) из следующих уравнений [6]:
. Из всех Fij (0) где j - номера, соответствующие центральным и дополнительным точкам пространства, выбирают функцию с наименьшим значением и, если этой функции соответствует дополнительная точка пространства, она принимается за центральную, а относительно ее задают две дополнительные точки пространства с предыдущим шагом итерации и вновь осуществляют определение Fij (1) уже на выбранном направлении, то есть при i = const. Если наименьшей функции Fij (t), где t = 0, 1, 2, 3,... номера итераций, соответствует центральная точка пространства, то для последующей итерации она остается центральной, но относительно ее задают две дополнительные точки пространства с меньшим шагом, например уменьшенным в два раза. Поиск прекращается при минимальном Fij (t) из трех значений при шаге итерации, равном или меньшем установленной невязке εr. Полученные в этом случае координаты х, у, z источника магнитного поля в системе координат ОХУZ, жестко связанной с датчиками (с объектом), принимают за действительные. Значения координат х', у', z' источника магнитного поля в выбранной опорной системе координат, например геомагнитной системе координат, отделяют устройством 23 (фиг.1) из следующих уравнений [6]:
х' = l1х + l2у + l3z;
у' = m1x + m2y + m3z;
z' = n1x + n2y + n3z,
где (l1, m1, n1), (l2, m2, n2), (l3, m3, n3) - направляющие косинусы осей ОХ, ОУ, OZ системы координат ОХУZ, являющиеся функциями углов курса (магнитного курса), крена, тангажа, объекта в опорной системе координат О'Х'У'Z'.
В предлагаемом техническом решении поиск действительных значений координат источника магнитного поля осуществляется для первого цикла итерации по четырем направлениям, а затем по одному направлению, что исключает ложные решения, возможные в точках пространства, не лежащих на действительном направлении.
В случае, если векторы  и
и  коллинеарны, то следует изменить, по крайней мере, угол крена или тангажа на величину, при которой упомянутые векторы будут неколлинеарны, а затем по измеренным
коллинеарны, то следует изменить, по крайней мере, угол крена или тангажа на величину, при которой упомянутые векторы будут неколлинеарны, а затем по измеренным  углам курса, крена, тангажа и известным, а1, а2, b3, b4 определяют в опорной системе координат проекции радиус-вектора источника магнитного поля.
углам курса, крена, тангажа и известным, а1, а2, b3, b4 определяют в опорной системе координат проекции радиус-вектора источника магнитного поля.
При Вх12 ≠ 0, Ву12 = Bz12 = 0 и Вх34 = Вz34= 0, Ву34 ≠ 0 значения координат у = z = 0 и проекции вектора магнитного момента Му = Мz = 0. Поиск координат х осуществляют по оси ОХ. Для выбранного размещения датчиков 26 и 27 (фиг.2) при  значение х > 0, а при
значение х > 0, а при  значение х <0.
значение х <0.
При Вх12 ≠ 0, Ву12 = Вz12= 0 и Вх34 = Вz34 = 0, Ву34 ≠ 0 значения координат х = z = 0 и проекций вектора магнитного момента Мх = Мz = 0. Поиск координаты у осуществляют на оси ОУ. Для выбранного размещения датчиков 28 и 29 (фиг.2) при  значение у > 0, а при
значение у > 0, а при  значение у <0.
значение у <0.
Датчики 26-29 (фиг. 2) размещены в точках пространства (в вершинах параллелограмма 26, 27, 28, 29), не лежащих на поверхности сферы, поэтому, по крайней мере, одно из расстояний от источника магнитного поля до одного из датчиков будет отличаться от каждого из расстояний от этого источника до каждого из трех остальных датчиков. Пространственное размещение датчиков 26-29 в предлагаемом техническом решении исключает неустойчивость решения задачи определения координат источника магнитного поля, так как один из определителей матриц (А1 - А2) и (А3 - А4) не будет равен нулю.
Синхронное измерение проекций векторов магнитной индукции в местах размещения датчиков 26 -29 (фиг. 2) с измерением углов курса, крена, тангажа объекта обеспечивают определение координат источника магнитного поля в опорной системе координат независимо от углового положения объекта, при котором были измерены проекции векторов магнитной индукции.
В предлагаемом техническом решении каждый трехкомпонентный датчик с тремя усилительно-преобразовательными блоками и генератором переменных напряжений, включенных между собой, образует трехкомпонентный магнитометр. Поэтому предлагаемое устройство по сравнению с устройствами, принятыми за аналог и прототип, обеспечивает развязку прохождения измеряемых сигналов по цепям возбуждения и меньшую затрату мощности, связанную с потерями в электрических цепях, связывающих генератор с датчиками 1-4 (фиг.1) и блоками 5-16, при разнесении датчиков 1-4 на десятки и сотни метров (при исследовании эпицентров землетрясений).
В предлагаемом техническом решении (фиг. 1) датчики 1-4, блоки 5-16, генераторы 17-20 выполнены аналогично устройству для измерения параметров магнитного поля [2]. Углоизмерительным устройством может быть гиростабилизированная платформа, обеспечивающая измерение трех углов вращения объекта с погрешностью 0,5 угловых минут [9]. Регистрирующий блок 21 и устройство обработки информации 23 могут быть реализованы преобразователем измерительным многоканальным (ПИМ-1, сертификат 15660, Госстандарт России), разработанный АО "АТИС" (г. С.-Петербург).
Литература
1. А.с. 1064251, МКИ G 01 R 33/02. Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента (Б.М. Смирнов // 1983, Бюл. изобр. 48).
2. Афанасьев Ю. В. Феррозондовые приборы. - Л.: Энергоатомиздат, 1986, 188 с.
3. Смирнов Б.М. Решение задачи магнитной совместимости датчика тесламетра с подвижным объектом // Измерительная техника. 1997, 9, с.44-46.
4. Пат. РФ 2166735. Устройство для дистанционного определения координат и углового положения объекта (варианты) (Б.М. Смирнов// 2001, Бюл. изобр. 13).
5. Смирнов Б.М. Решение задачи ограничения пространства определения координат и углового положения объекта численным методом // Измерительная техника, 2001, 8, с.23-27.
6. Корн Г., Корн Т. Справочник по математике. - М.: Наука, 1973, 832 с.
7. Семенов В.Г. Решение обратной задачи по определению источника физического поля дипольной или квадрупольной модели // Методы и средства измерения параметров магнитного поля. - Л.: НПО "ВНИИМ им. Д.И. Менделеева", 1980, с.3-19.
8. Яновский Б.М. Земной магнетизм. - Л: ЛГУ, 1978, 592 с.
9. Теория и конструкция гироскопических приборов и систем // И.В. Одинова, Г.Д. Блюмин, А.В. Карпухин и др. - М.: Высшая школа, 1971, 508 с.
Изобретение относится к измерительной технике и может быть использовано в магнитной навигации для определения координат и вектора скорости источника магнитного поля с целью предотвращения его столкновения с объектом, являющимся носителем средств измерения параметров магнитного поля, в сейсмических системах определения эпицентра и активности землетрясения для проведения исследований возможности предсказания землетрясений. Устройство для определения координат источника магнитного поля с подвижного объекта содержит расположенные на объекте четыре трехкомпонентных магнитометрических датчика, двенадцать усилительно-преобразовательных блоков, четыре генератора переменных напряжений, регистрирующий блок, углоизмерительное устройство и устройство обработки информации. Данные конструктивные блоки устройства размещены и включены между собой соответствующим образом. Технический результат состоит в обеспечении однозначного определения координат источника магнитного поля в выбранной системе координат при отсутствии и наличии внешнего однородного магнитного поля и отсутствии каких-либо сведений об источнике магнитного поля. 2 ил.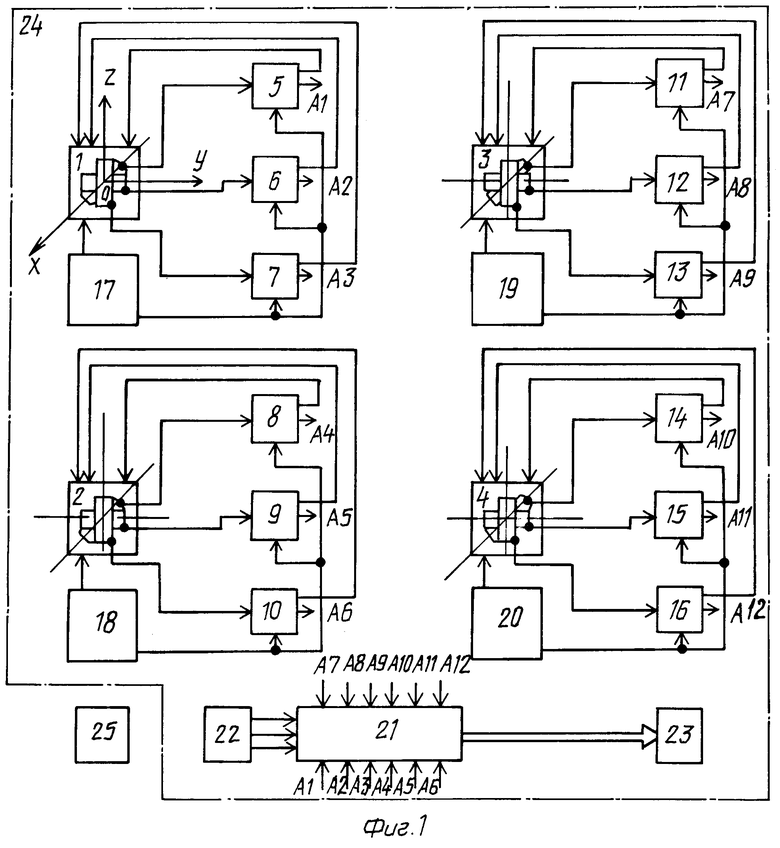
Устройство для определения координат источника магнитного поля с подвижного объекта, включающее четыре трехкомпонентных магнитометрических датчика, генератор переменных напряжений и двенадцать усилительно-преобразовательных блоков, первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к соответствующим выходам первого трехкомпонентного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к соответствующим выходам второго трехкомпонентного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к соответствующим выходам третьего трехкомпонентного датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к соответствующим выходам четвертого трехкомпонентного датчика, первый выход генератора переменных напряжений подключен к первому входу первого трехкомпонентного датчика, а второй выход - к вторым входам первого, второго и третьего усилительно-преобразовательных блоков, отличающееся тем, что оно снабжено вторым, третьим и четвертым генераторами переменных напряжений, углоизмерительным устройством, регистрирующим блоком, выполненным с возможностью синхронной регистрации сигналов, пропорциональных значениям проекций векторов магнитной индукции и углов курса, крена, тангажа объекта, и устройством обработки информации, вход которого подключен к выходу регистрирующего блока, первые выходы усилительно-преобразовательных блоков и три выхода углоизмерительного устройства подключены к соответствующим входам регистрирующего блока, первый выход второго генератора переменных напряжений подключен к первому входу второго трехкомпонентного датчика, а второй выход - к вторым входам четвертого, пятого и шестого усилительно-преобразовательных блоков, первый выход третьего генератора переменных напряжений подключен к первому входу третьего трехкомпонентного датчика, а второй выход - к вторым входам седьмого, восьмого и девятого усилительно-преобразовательных блоков, первый выход четвертого генератора переменных напряжений подключен к первому входу четвертого трехкомпонентного датчика, а второй выход - к вторым входам десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков, вторые выходы первого, второго и третьего усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам первого трехкомпонентного датчика, вторые выходы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам второго трехкомпонентного датчика, вторые выходы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам третьего трехкомпонентного датчика, вторые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам четвертого трехкомпонентного датчика, при этом первый и второй трехкомпонентные датчики размещены на одной оси, третий и четвертый трехкомпонентные датчики размещены на второй оси и симметрично первой оси, а первый и второй трехкомпонентные датчики установлены симметрично упомянутой второй оси, первый и второй трехкомпонентные датчики установлены друг от друга на расстоянии, отличном от расстояния между третьим и четвертым трехкомпонентными датчиками, четыре трехкомпонентных датчика, четыре генератора переменных напряжений, двенадцать усилительно-преобразовательных блоков, регистрирующий блок, углоизмерительное устройство и устройство обработки информации размещены на подвижном объекте.
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2166735C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2138019C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| US 3983474 А, 28.09.1976. | |||

