Изобретение относится к рельсовому транспорту и может быть использовано на подвижном составе с асинхронными тяговыми двигателями, питаемыми от статических преобразователей напряжения и частоты.
Известен способ регулирования приводного и/или тормозного усилия тяговых электродвигателей подвижного состава без свободных осей в области граничного сцепления колес с рельсами, основанный на том, что переход в нестабильную зону скольжения определяют по более сильному ускорению вращения колес, а возврат в стабильную зону скольжения осуществляют снижением величины приводного или соответственно тормозного усилия [1].
Недостатком данного способа является регулирование вокруг максимума характеристики сцепления и отсутствие оптимального запаса по сцеплению, что затрудняет гашение автоколебаний в кинематической передаче при ухудшении условий сцепления и попадании в нестабильную зону. Это увеличивает износ и может вызвать повреждение элементов тягового привода.
Цель изобретения - предотвращение повышенного скольжения колес и подавление колебаний силы сцепления между колесом и рельсом.
Указанная цель достигается непрерывной коррекцией амплитуды питающего асинхронные двигатели напряжения, вычисленной по известному закону М.П.Костенко, в функции модуля относительной средней скорости скольжения колеса. Причем при вычислении относительной средней скорости скольжения колеса для скоростей локомотива, не превышающих 1 км/ч, скорость локомотива принимается равной 1 км/ч.
При управлении асинхронным двигателем по известному закону М.П.Костенко амплитуда питающего двигатель напряжения определяется по формуле [2]

где U1(Кост) и U1ном - требуемое и номинальное значение амплитуды фазного напряжения соответственно, В;
f1 и f1ном - текущее и номинальное значение частоты фазного напряжения соответственно, Гц;
М и Мном - текущее и номинальное значение вращающего момента двигателя соответственно, Н·м.
Предлагается вычислять амплитуду питающего напряжения по формуле с коррекцией:

где U1 - амплитуда фазного напряжения с учетом коррекции, В;
Vск.cp.отн. - относительная средняя скорость скольжения колеса, км/ч;
k - коэффициент пропорциональности.
Уменьшаемое в выражении (2), т.е. напряжение U1(Кост), вычисленное по закону М.П.Костенко, при достижении определенного значения ограничивается на заданном уровне, например, остается равным номинальному, а текущее значение амплитуды питающего напряжения U1 всегда корректируется на величину 
Частота f1 питающего двигатель напряжения (для обеспечения естественной жесткости характеристик асинхронного двигателя в случае срыва сцепления) вычисляется не по скорости вращения ротора, а по скорости локомотива

где fп - частота, соответствующая скорости локомотива, приведенной к ротору двигателя, Гц;
f2 - частота абсолютного скольжения (знак "+" относится к тяговому, а знак "-" - к тормозному режимам асинхронной машины), Гц.
Частота абсолютного скольжения f2 поддерживается при пуске и торможении постоянной для соответствующего положения контроллера машиниста. От величины f2 зависит значение пускового и тормозного моментов и запас по сцеплению в нормальном режиме. Частота f1 питающего напряжения ограничивается на заданном уровне в зависимости от требуемой скорости транспортного средства.
Для осуществления предлагаемого способа регулирования необходимы:
1) сигнал линейной скорости локомотива, получаемый, например, с применением системы глобального позиционирования (GPS);
2) сигнал линейной скорости колеса, определяемый по частоте вращения и диаметру колеса.
Скорость скольжения колеса:

где Vск - скорость скольжения колеса, км/ч;
Vк и Vп - линейные скорости колеса и локомотива соответственно, км/ч.
Для получения средней скорости скольжения колеса Vск.ср сигнал Vск подается на фильтрующее звено. Далее вычисляется относительная средняя скорость скольжения колеса, причем для скорости поезда Vп>1 км/ч
а в диапазоне скоростей 0≤Vп≤1 км/ч

где Vск.ср. - средняя скорость скольжения колеса, км/ч.
Затем определяется модуль относительной средней скорости скольжения  и далее - амплитуда питающего напряжения по выражению (2). Выработанный сигнал подается в систему управления статическим преобразователем, который регулирует на фазах двигателя напряжение в соответствии с выражением (2) и частоту в соответствии с выражением (3).
и далее - амплитуда питающего напряжения по выражению (2). Выработанный сигнал подается в систему управления статическим преобразователем, который регулирует на фазах двигателя напряжение в соответствии с выражением (2) и частоту в соответствии с выражением (3).
Если к одному статическому преобразователю напряжения подключен не один, а параллельно несколько двигателей, вращающих каждый свою колесную пару, то в режиме тяги управление ведется по колесной паре с наибольшей, а в режиме торможения - с наименьшей линейной скоростью.
В нормальных режимах Vск минимально, и формулы регулирования (1) и (2) практически идентичны, однако в случае (2) имеется небольшой дополнительный запас по сцеплению, обусловленный величиной  Но при ухудшении условий сцепления скольжение колес возрастает, и система реагирует, снижая напряжение и подавляя избыточное скольжение колес, боксование и автоколебания. Если использовать при регулировании вместо формул (2), (3) традиционные формулы (1), (3), то автоколебания в аналогичных режимах не затухают.
Но при ухудшении условий сцепления скольжение колес возрастает, и система реагирует, снижая напряжение и подавляя избыточное скольжение колес, боксование и автоколебания. Если использовать при регулировании вместо формул (2), (3) традиционные формулы (1), (3), то автоколебания в аналогичных режимах не затухают.
Чтобы это проиллюстрировать, было выполнено компьютерное моделирование тягового привода с опорно-осевой подвеской асинхронного тягового двигателя ДАТ 305, питаемого от инвертора напряжения с синусоидальной широтно-импульсной модуляцией. В модель механической части подставлены параметры механической передачи тепловоза ТЭМ21.
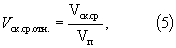
На фиг. 1 представлены результаты моделирования нестационарных режимов при периодическом снижении в процессе разгона локомотива потенциального коэффициента сцепления Ψ0 до 0,2 (наезд на масляное пятно в интервалы времени 3,5-4 с, 5-6 с, 9-10 с) при регулировании по обычному закону (1), (3). На фиг. 2 - результаты моделирования тех же нестационарных режимов, но при регулировании по предлагаемому варианту (2), (3).
На приведенных графиках Мэм - электромагнитный момент асинхронного двигателя, Vк - скорость колеса, Ψ0 - потенциальный коэффициент сцепления, Ψ - текущее значение коэффициента сцепления.
При обычном регулировании без коррекции напряжения (фиг. 1) в случае резкого ухудшения условий сцепления (наезд на масляное пятно) боксование не прогрессирует благодаря высокой жесткости механических характеристик асинхронного двигателя, но возникают фрикционные автоколебания. То есть при ухудшении условий сцепления увеличивается скорость колеса и ротора двигателя (возникает боксование), что приводит к снижению электромагнитного момента и силы тяги, из-за чего скорость колеса и ротора снижается, сцепление восстанавливается, но электромагнитный момент двигателя опять нарастает в соответствии с формируемой по законам (1), (3) механической характеристикой двигателя, и процесс срыва сцепления периодически повторяется.
В аналогичной ситуации при предлагаемом способе регулирования с коррекцией напряжения (фиг. 2) система управления обеспечивает как раз такое снижение электромагнитного момента Мэм и тока двигателя Isa, что колебания скорости колеса Vк подавляются, и локомотив при наезде на масляное пятно работает практически на пределе по сцеплению (коэффициент сцепления (близок к Ψ0). Когда условия сцепления восстанавливаются, средняя скорость скольжения колеса снижается, и система управления согласно выражению (2) автоматически увеличивает питающее напряжение, повышая электромагнитный момент до уровня нормального режима. При этом запас по сцеплению в нормальном режиме принят небольшим: относительный коэффициент сцепления К=0,9 [2] (К=Ψ/Ψ0, при максимальном значении К=1 локомотив работает на пределе по сцеплению). Этот запас необходим, так реальная функция изменения сил в контакте колесо-рельс носит стохастический характер, что увеличивает вероятность попадания в нестабильную зону скольжения и затрудняет гашение автоколебаний.
Чтобы избежать снижения силы тяги при ухудшении условий сцепления, одновременно с регулированием напряжения по выражению (2) и частоты по закону (3) возможна кратковременная автоматическая подсыпка песка (в течение 0,6-1,1 с) под буксующую ось в начальный момент возникновения боксования. Обнаружение начального момента боксования производится по величине  исходя из условия
исходя из условия  (что соответствует 10% от скорости локомотива).
(что соответствует 10% от скорости локомотива).
Повышенное скольжение колес и фрикционные автоколебания приводят к увеличению износа узлов и деталей асинхронного тягового привода. Предлагаемый способ предупреждения боксования и юза и подавления фрикционных автоколебаний позволит повысить надежность и увеличить срок службы подвижного состава с асинхронными тяговыми двигателями.
Источники информации
1. Патент РФ №2105679 С1, кл. B 60 L 3/10.
2. Электроподвижной состав с асинхронными тяговыми двигателями / Под ред. Н.А.Ротанова. - М.: Транспорт, 1991. - 336 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от боксования транспортного средства с асинхронными двигателями | 1979 |
|
SU863435A1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2012 |
|
RU2496100C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| Способ регулирования силы тяги локомотива с автономным источником питания | 1983 |
|
SU1093578A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового привода | 1981 |
|
SU1029367A2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА ТЕПЛОВОЗА | 2011 |
|
RU2467899C1 |

Изобретение относится к рельсовому транспорту и может быть использовано на подвижном составе с асинхронными тяговыми двигателями, питаемыми от статических преобразователей напряжения и частоты. В способе осуществляют непрерывную коррекцию амплитуды питающего асинхронные двигатели напряжения в функции модуля относительной средней скорости скольжения колеса. При этом при вычислении относительной средней скорости скольжения колеса для скоростей локомотива, не превышающих 1 км/ч, скорость локомотива принимают равной 1 км/ч. Предложенным способом предотвращается повышенное скольжение колес и подавление колебаний силы сцепления между колесом и рельсом. 2 ил.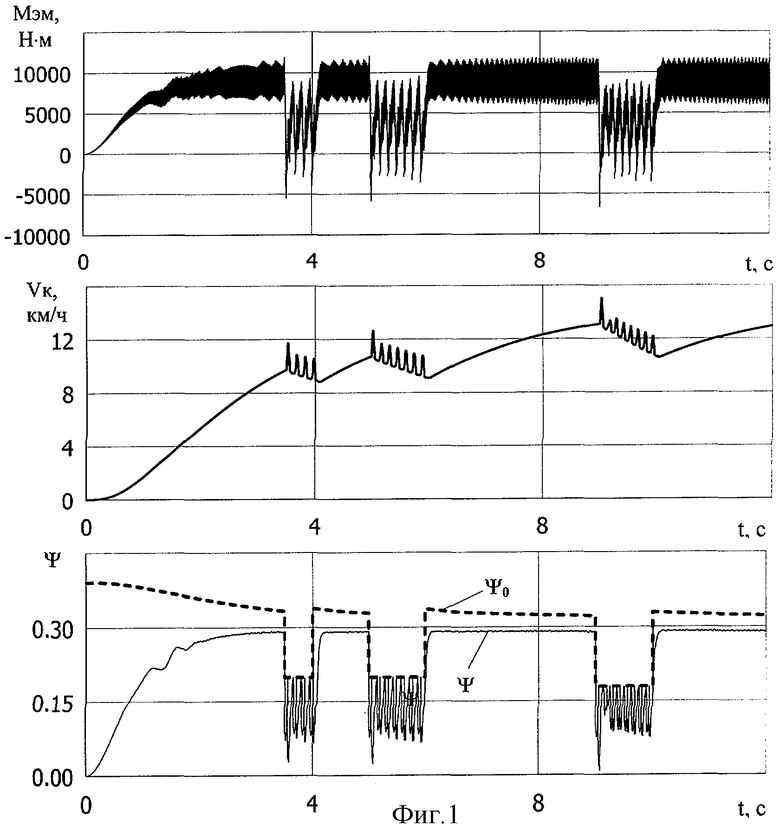
Способ предупреждения боксования и юза колесных пар и подавления фрикционных автоколебаний в кинематической цепи подвижного состава с асинхронными тяговыми двигателями, питаемыми от статического преобразователя напряжения и частоты, отличающийся тем, что осуществляют непрерывную коррекцию амплитуды питающего асинхронные двигатели напряжения в функции модуля относительной средней скорости скольжения колеса в соответствии с соотношением

где U1 - амплитуда фазного напряжения с учетом коррекции, В;
U1ном - номинальное значение амплитуды фазного напряжения, В;
f1 и f1ном - текущее и номинальное значения частоты фазного напряжения соответственно, Гц;
М и Мном - текущее и номинальное значения вращающего момента двигателя соответственно, Н·м;
Vск.ср.отн. - относительная средняя скорость скольжения колеса, км/ч;
κ - коэффициент пропорциональности,
причем при вычислении относительной средней скорости скольжения колеса Vск.ср.отн. для скоростей локомотива, не превышающих 1 км/ч, скорость локомотива принимают равной 1 км/ч.
| Электроподвижной состав с асинхронными тяговыми двигателями, под ред | |||
| Н.А.Ротанова | |||
| - М., Транспорт, 1991, с.271-282 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ПРИВОДНОГО И/ИЛИ ТОРМОЗНОГО УСИЛИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОДВИЖНОГО СОСТАВА БЕЗ СВОБОДНЫХ ОСЕЙ В ОБЛАСТИ ГРАНИЧНОГО СЦЕПЛЕНИЯ КОЛЕС С РЕЛЬСАМИ | 1995 |
|
RU2105679C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗОК АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2001 |
|
RU2193979C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ПОДВИЖНОГО СОСТАВА С ПИТАЕМЫМИ ОТ ИСТОЧНИКА ЧЕРЕЗ ПОЛУПРОВОДНИКОВУЮ ПРЕОБРАЗОВАТЕЛЬНУЮ УСТАНОВКУ ТРЕМЯ И БОЛЕЕ АСИНХРОННЫМИ ДВИГАТЕЛЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092337C1 |
| СИСТЕМА ГРУППОВОГО ЭНЕРГОСНАБЖЕНИЯ АСИНХРОННЫХ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1999 |
|
RU2166441C2 |

