Изобретение относится к измерительной технике и может быть использовано для измерения и контроля параметров движения объектов, например элементов робото- технических систем.
Целью изобретения является повышение точности измерения перемещений и расширение области использования за счет исключения электромагнитных помех в сигнальных цепях первичного преобразователя перемещений.
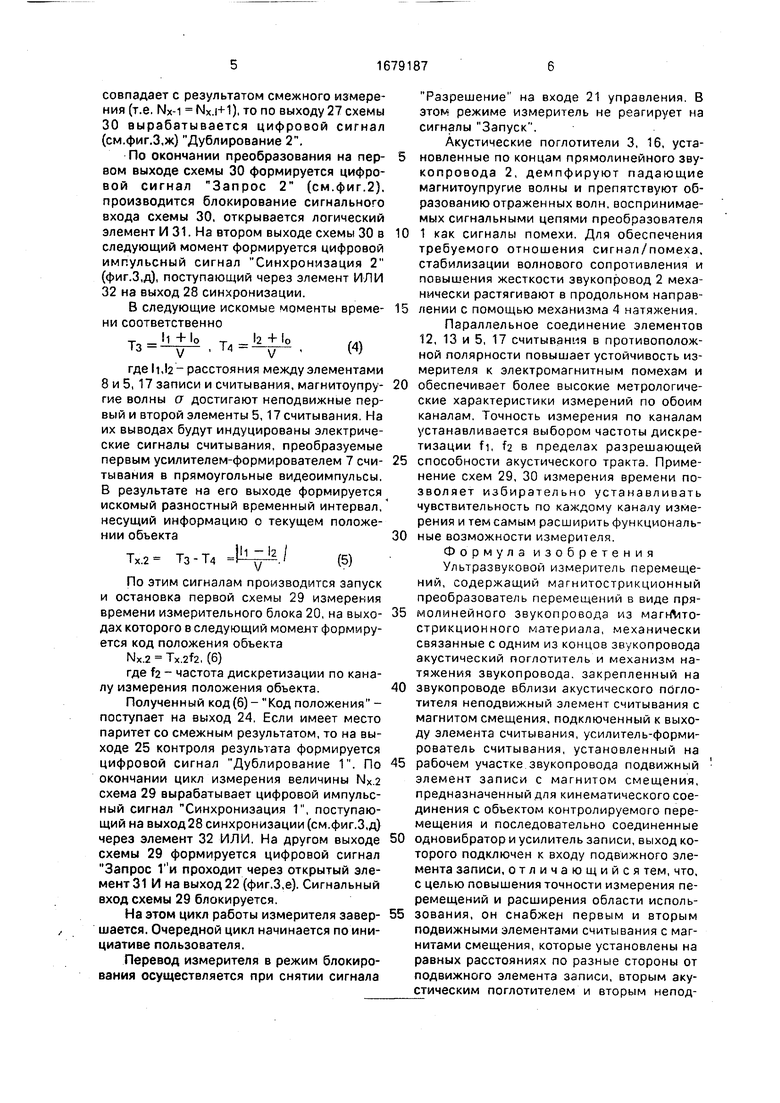
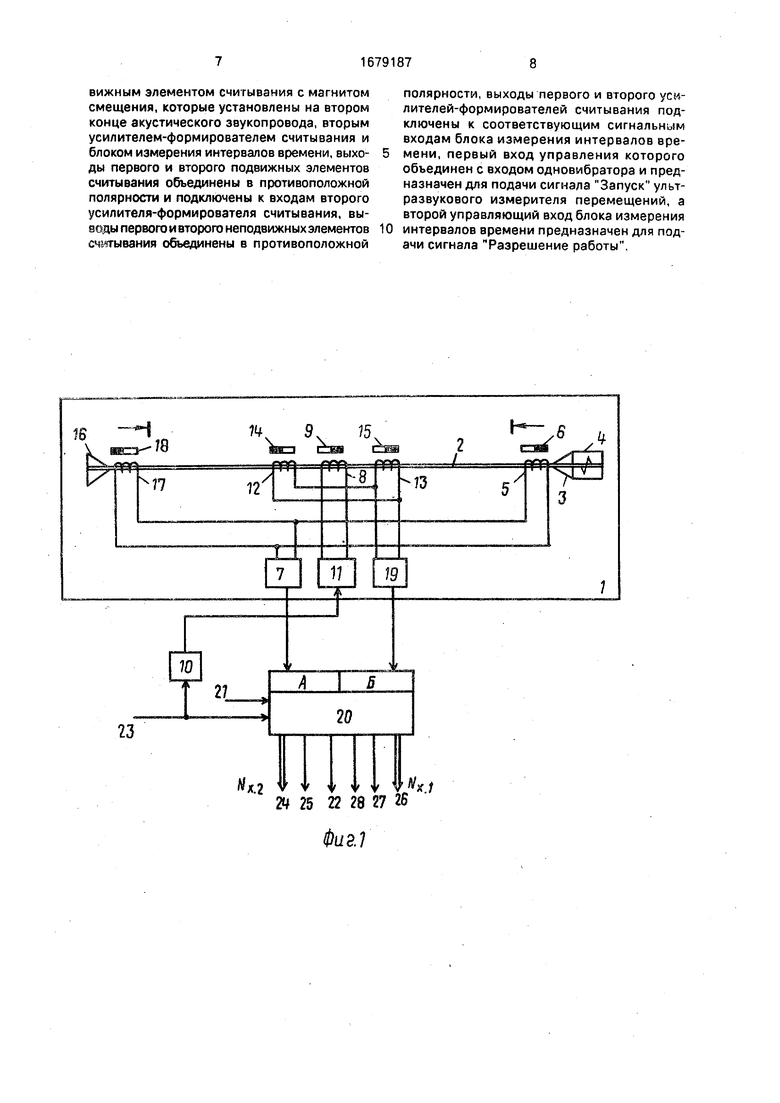
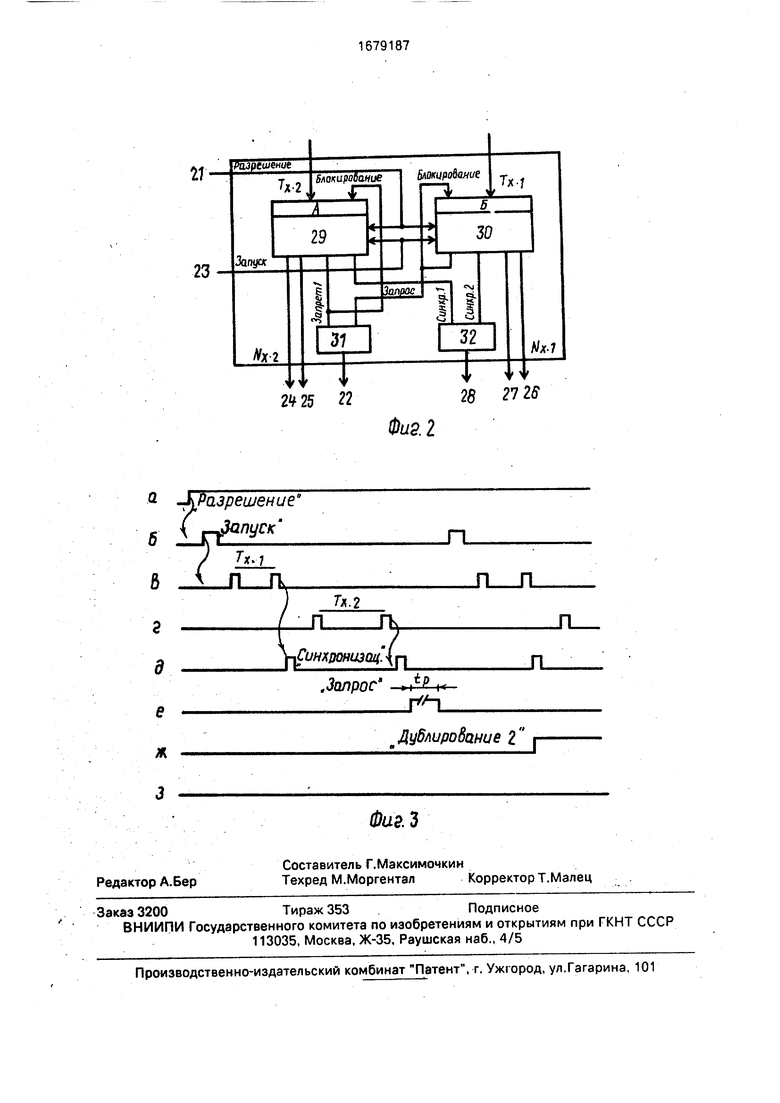
На фиг.1 приведена структурная схема ультразвукового измерителя перемещений; на фиг.2 - пример выполнения блока измерения интервалов времени; на фиг.З - временные диаграммы, поясняющие работу ультразвукового измерителя перемещений.
Ультразвуковой измеритель перемещений содержит магнитострикционный преобразователь 1 перемещений в виде прямолинейного звукопровода 2, выполненного из магнитострикционного материала, механически связанные с одним из концов звукопровода 2 акустический поглотитель 3 и механизм 4 натяжения звукопровода 2, закрепленный на звукопроводе 2 вблизи акустического поглотителя 3 неподвижный элемент 5 считывания с магнитом 6 смещения, подключенный к выходу элемента 5 считывания усилитель-формирователь 7 считывания, установленный на рабочем участке звукопровода 2 подвижный элемент 8 записи с магнитом 9 смещения, предназначенный для кинематического соединения с объектом контролируемого перемещения, и последовательно соединенные одно- вибратор 10 и усилитель 11 записи, выход Которого подключен к входу подвижного элемента 8 записи, первый и второй поО
VI о
00
VI
движные элементы 12,13 считывания с магнитами 14, 15 смещения, которые установлены на равных расстояниях по разные стороны от подвижного элемента 8 записи, второй акустический поглотитель 16 и второй неподвижный элемент 17 считывания с магнитом 18 смещения, которые установлены на втором конце акустического звукопровода 2, второй усилитель- формирователь 19 считывания и блок 20 измерения интервалов времени.
Первый и второй подвижные элементы 12,13 считывания объединены в противоположной полярности и подключены к входам второго усилителя-формирователя 19 считывания, первый и второй неподвижные элементы 5, 17 считывания объединены в противоположной полярности, выходы первого и второго усилителей-формирователей 7,19 считывания подключены к соответствующим сигнальным входам блока 20 измерения интервалов времени, первый вход управления которого объединен с входом одновибратора 10 и предназначен для подачи сигнала Запуск ультразвукового измерителя перемещений, а второй управляющий вход блока 20 измерения интервалов времени предназначен для подачи сигнала Разрешение работы.
Кроме того, на фмг.1 показаны вход 21 разрешения, выход 22 запроса и вход 23 запуска, первый выход 24 результата, первый выход 25 контроля результата, второй выход 26 результата, второй выход 27 контроля результата и выход 28 синхронизации.
Блок 20 измерения интервалов шремени может быть выполнен из двух схем 29, 30 измерения времени, элемента И 31 и элемента ИЛИ 32 (см.фиг.2). Выход элемента И 31 служит выходом 22 запроса, выходы схем 29,30 измерения времени служат выходами 24, 26 результата, управляющие выходы указанных схбм 29, 30 служат выходами 25, 27 контроля результата, а выход элемента ИЛИ 32 служит выходом 28 синхронизации. Первые входы управления схем 29,30 объединены и служат входом 21 разрешения блока 20, а вторые входы управления схем 29, 30 объединены и служат входом 23 запуска блока 20.
Сигнальные входы первой и второй схемы 29, 30 измерения интервалов времени являются первыми входами блока 20.
Измеритель работает следующим обра- зом.
Первоначально измеритель устанавливается в исходное состояние (см.фиг.1). При подаче цифрового сигнала Разрешение (см.фиг.3,а) на выход 21 разрешения изме
0
5
0
5
0
5
0
5
0
ритель переводится в режим работы. На его выходе 22 выставляется цифровой сигнал Запрос (см.фиг.З.е) в ответ на который пользователь через время реакции tp на вход 23 подает импульсный сигнал Запуск (см.фиг.3,6), по которому подготавливается к работе блок 20 и запускается одновибра- тор 10.
Одновибратор 10 вырабатывает прямоугольный видеоимпульс записи длительности Гц (который может быть промодулирован высокой частотой) и возбуждает усилитель 11 записи преобразователя 1. На его выходе формируется токовый импульс записи х, который проходит через обмотку подвижного элемента 8 записи. В звукопроводе 2 возбуждается магнитоупругая волна стх вследствие магнитомеханического преобразователя, Эта волна распространяется по звукопрово- ду в обе стороны с фазовой скоростью V.
В некоторые искомые моменты времени соответственно
Ti - lo м ТЧ - loMl
11 V+VxM l2 V+V4 nj
где 10 - опорное расстояние между син- хроподвижными элементами 8 и 12,13 записи и считывания первичного МПП;
Vx - искомая скорость перемещения объеме, если направление перемещения совпадает с направлением распространения магнмтоупругой волны а вдоль звуко- провода, магнитоупругая волна а достигает первый и второй подвижные элементы 12, 13 считывания с магнитами 9 смещения и наводит не их выводах электрические импульсы считывания, которые проходят на вход второго усилителя-формирователя 19 считывания, усиливаются, преобразуются в прямоугольные видеоимпульсы считывания (см.фмг.З.в) и проходят на один из сигнальных входов измерительного блока 20. Если скорость Vx перемещения объекта выше некоторого начального порогового значения, определяемого параметрической чувствительностью канала, значение разностного интервала перемещения составит величину
Тх.1 -i |Ti - Т2/ -± Р)
который второй схемой 30 измерения времени будет преобразован в соответствующий цифровой код
Nx.1 - Т х.,(3)
g где ft - частота дискретизации по каналу измерения скорости перемещения объекта.
Сформированный код (3) - Код скорости - с выходов схемы 30 поступает на выход 26 результата. Если этот результат
совпадает с результатом смежного измерения (т.е. Nx-1 Nx.i+1), то по выходу 27 схемы 30 вырабатывается цифровой сигнал (см.фиг.3,ж) Дублирование 2.
По окончании преобразования на первом выходе схемы 30 формируется цифровой сигнал Запрос 2 (см.фиг.2), производится блокирование сигнального входа схемы 30, открывается логический элемент И 31. На втором выходе схемы 30 в следующий момент формируется цифровой импульсный сигнал Синхронизация 2 (фиг.3,д), поступающий через элемент ИЛИ 32 на выход 28 синхронизации.
В следующие искомые моменты времени соответственно
Тз
J1+lc
т l2+lo
Т4 г
(4)
у ч - V где li, la-расстояния между элементами 8 и 5, 17 записи и считывания, магнитоупру- гие волны а достигают неподвижные первый и второй элементы 5,17 считывания. На их выводах будут индуцированы электрические сигналы считывания, преобразуемые первым усилителем-формирователем 7 считывания в прямоугольные видеоимпульсы, В результате на его выходе формируется искомый разностный временный интервал, несущий информацию о текущем положении объекта
Jllnb/
Тх.2 Тз - Т4
(5)
По этим сигналам производится запуск и остановка первой схемы 29 измерения времени измерительного блока 20, на выхо- дах которого в следующий момелт формируется код положения объекта
Nx.2 Tx.2f2. (6)
где f2 - частота дискретизации по каналу измерения положения объекта.
Полученный код (6) - Код положения - поступает на выход 24. Если имеет место паритет со смежным результатом, то на выходе 25 контроля результата формируется цифровой сигнал Дублирование 1. По окончании цикл измерения величины Nx.2 схема 29 вырабатывает цифровой импульсный сигнал Синхронизация 1, поступающий на выход 28 синхронизации (см.фиг.З.д) через элемент 32 ИЛИ. На другом выходе схемы 29 формируется цифровой сигнал Запрос проходит через открытый элемент 31 И на выход 22 (фиг.З.е). Сигнальный вход схемы 29 блокируется.
На этом цикл работы измерителя завер- шается. Очередной цикл начинается по инициативе пользователя.
Перевод измерителя в режим блокирования осуществляется при снятии сигнала
0
5
0
5
0
5
0
5 0
5
Разрешение на входе 21 управления. В этом режиме измеритель не реагирует на сигналы Запуск.
Акустические поглотители 3, 16, установленные по концам прямолинейного зву- копровода 2, демпфируют падающие магнитоупругие волны и препятствуют образованию отраженных волн, воспринимаемых сигнальными цепями преобразователя 1 как сигналы помехи. Для обеспечения требуемого отношения сигнал/помеха, стабилизации волнового сопротивления и повышения жесткости звукопровод 2 механически растягивают в продольном направлении с помощью механизма 4 натяжения.
Параллельное соединение элементов 12, 13 и 5, 17 считывания в противоположной полярности повышает устойчивость измерителя к электромагнитным помехам и обеспечивает более высокие метрологические характеристики измерений по обоим каналам. Точность измерения по каналам устанавливается выбором частоты дискретизации fi, f2 в пределах разрешающей способности акустического тракта. Применение схем 29, 30 измерения времени позволяет избирательно устанавливать чувствительность по каждому каналу измерения и тем самым расширить функциональные возможности измерителя.
Формула изобретения
Ультразвуковой измеритель перемещений, содержащий магнитострикционный преобразователь перемещений в виде прямолинейного звукопровода из стрикционного материала, механически связанные с одним из концов звукопровода акустический поглотитель и механизм натяжения звукопровода. закрепленный на звукопроводе вблизи акустического поглотителя неподвижный элемент считывания с магнитом смещения, подключенный к выходу элемента считывания, усилитель-формирователь считывания, установленный на рабочем участке звукопровода подвижный элемент записи с магнитом смещения, предназначенный для кинематического соединения с объектом контролируемого перемещения и последовательно соединенные одновибратор и усилитель записи, выход которого подключен к входу подвижного элемента записи, отличающийся тем, что, с целью повышения точности измерения перемещений и расширения области использования, он снабжен первым и вторым подвижными элементами считывания с магнитами смещения, которые установлены на равных расстояниях по разные стороны от подвижного элемента записи, вторым акустическим поглотителем и вторым неподвижным элементом считывания с магнитом смещения, которые установлены на втором конце акустического звукопровода, вторым усилителем-формирователем считывания и блоком измерения интервалов времени, выходы первого и второго подвижных элементов считывания объединены в противоположной полярности и подключены к входам второго усилителя-формирователя считывания, выводы первого и второго неподвижных элементов считывания объединены в противоположной
полярности, выходы первого и второго ycit- лителей-формирователей считывания подключены к соответствующим сигнальным входам блока измерения интервалов времени, первый вход управления которого объединен с входом одновибратора и предназначен для подачи сигнала Запуск ультразвукового измерителя перемещений, а второй управляющий вход блока измерения интервалов времени предназначен для подачи сигнала Разрешение работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| Ультразвуковой преобразователь перемещений | 1989 |
|
SU1765690A1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2299401C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
Изобретение относится к измерительной технике и может быть использовано для измерения и контроля параметров движения объектов, например элементов робототехнических систем. Целью изобретения является повышение точности измерения перемещений и расширение области использования за счет исключения электромагнитных помех о сигнальных цепях первичного преобразователя перемещений, содержащего прямолинейный звукопровод и снабженного двумя парами параллельно соединенных в противоположной полярности элементов считывания. Элементы считывания первой пары симметрично расположены относительно элемента записи и перемещаются по звукопроводу преобразователя совместно с элементом записи, а элементы считывания второй пары размещены по краям звукопровода. 3 ил
Фиг.1
И
чшешеное
,;
блокирование
29
23
Запуск
t
t
Vx
2228 2116
Фи$.2
Гл.2
JTL
Синхронизоц .п
X
.Запрос и
Блокирование
Тх-Г
30
Зслрос I
м
«ч.
t
Vx-7
П
JITI
.п
X
JL
Дублирование 2
Г
| Магнитострикционный дифференциальный преобразователь перемещений | 1980 |
|
SU956964A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
