Изобретение относится к области специального строительства и может быть использовано при создании новых систем городского общественного транспорта.
История монорельсовых транспортных систем насчитывает уже целое столетие. Так, в пат. США №1049782 (07.01.1913 г.) обнаруживают описание транспортного средства, практически ничем не отличающегося от аналогичных современных моделей. Автор даже предусмотрел передний и задний обтекатели, характерные для скоростных поездов конца XX века. По идее автора, привод экипажа должен был осуществляться с помощью встроенных в ходовые колеса электродвигателей (принцип «мотор-колесо»). Однако на примерах пионерских разработок также видны и характерные конструктивные недостатки, ставшие впоследствии роковыми. Прежде всего, здесь возникает весьма серьезная проблема устойчивости экипажа на узкой балке. Первоначально планировалось обойтись всего двумя группами боковых направляющих колес, расположенных ниже основных ходовых колес и установленных под углом (обычно - 45°).
При наклонах транспортного средства боковые направляющие ролики (колеса) соскальзывают со своих поверхностей качения и надежной стабилизации не получается. Чтобы избежать аварийной ситуации, автор вынужден был снабдить свой «футуристический» экипаж своеобразными страховочными полозьями. Это было только началом в длинной цепи разочарований. Многие сотни проектов и всего лишь несколько доведенных до практического воплощения систем - итог развития. Но и действующие системы не радуют энтузиастов идеи, поскольку транспортные средства пока движутся по эстакадам со скоростью обычного трамвая и служат скорее в качестве аттракциона наподобие «колеса обозрения».
Вот другой патент США №3095828 (2 июля 1963 г.). Прошло полвека, но система по-прежнему находится в стадии «созревания». Появились дополнительные пары боковых роликов, а внешний вид транспортного средства стал «антиэстетичным». Принесенная жертва оказалась напрасной, поскольку проблема устойчивости осталась нерешенной. Дело в том, что для обеспечения стабилизирующего момента сил расстояние между верхними и нижними боковыми роликами должно существенно превышать высоту центра тяжести над опорной поверхностью качения. Расчеты показывают, что даже полной высоты несущей балки мало. Автор пат. США №3095828 решил использовать для стабилизации транспортного средства прием, используемый на виражах гонщиками-мотоциклистами. Прием сводится к тому, что после вхождения в поворот переднее рулевое колесо направляется несколько в сторону и движется с проскальзыванием. В дальнейшем идея «подруливания» опорным колесом стала популярной. Пат. США №4996928 (5 марта 1991 г.) содержит подробное описание монорельсового транспортного средства на базе «мотоблока» - единственного опорного колеса с совмещенной трансмиссией. Будучи весьма оригинальной с точки зрения механики конструкция совершенно порочна с точки зрения теории сопротивления материалов - сосредоточение всей весовой нагрузки в малой зоне есть наихудший вариант для несущей балки.
Конструкторы монорельсовых систем до самого последнего времени почти не обращали внимания на устройство ходового пути как главной «детали» любого проекта. Сам термин «монорельс» изначально подразумевает цельный, монолитный продольный несущий элемент (наподобие показанного на чертежах к пат. США №3095828). Простейший расчет по пропорциям дает оценку погонной массы бетонной балки примерно 1,5 т/м, что для «облегченной» путевой конструкции много. Тем не менее, в системах начала XXI в. опять видим похожую балку (пат. США №6523481; опубл. 25.02.03).
Для отечественной патентной литературы последних 10 лет образцом «классической» компоновки элементов является система, описанная в пат. РФ №2158211 (Бюл. №30 за 2000 г.). Здесь присутствуют и сплошная бетонная балка и транспортное средство с разнесенными по высоте парными боковыми колесами. Помимо прочих проблем, сплошная балка создает еще и проблему криволинейных участков пути. Как известно, криволинейный участок обычного железнодорожного полотна представляет собой отнюдь не дугу окружности, а часть гиперболы: указанная форма траектории обеспечивает плавное возрастание центростремительной силы от нуля до ее максимальной величины и столь же плавное уменьшение на выходе из поворота. Математически «условие гладкости» выражается как требование отсутствия разрывов третьей производной. Если условие гладкости не учитывать, при входе в поворот каждое колесо будет испытывать сильный толчок, который обязательно почувствуют пассажиры. Поскольку монорельсовые системы до сих пор претендуют на почетную роль «высокоскоростных», обеспечение гладкой безударной траектории движения становится важнейшей задачей. Если же выполнять каждую из многочисленных балок по особому проекту, стоимость эстакады может оказаться запредельной.
ПРОТОТИП. В пат. РФ №2167403 (МПК 7 G01М 17/08, Бюл. №14 за 2001 г.) описан действующий испытательный комплекс на базе модернизированной монорельсовой системы.
С 2005 г. система начала регулярно работать на севере Москвы в районе Останкино как «экскурсионная». Характерные особенности прототипа:
а) транспортное средство (состав из 5-7 вагончиков) имеет ограниченный поперечный габарит с целью лучшего баланса масс относительно продольной оси;
б) вместо цельной сплошной бетонной балки используется коробчатая металлическая балка π-образной формы (П-образный профиль с горизонтальными боковыми выступами);
в) взаимно-перпендикулярное расположение боковых колес под боковыми выступами ходового пути, что позволило уменьшить полную высоту транспортного средства и сделать его эстетичным.
В остальном же московская монорельсовая система ничем не отличается от прочих ныне действующих в разных станах мира. Скорость движения весьма умеренная - 40 км/час.
Увеличению скорости, по-видимому, препятствуют многочисленные повороты с малыми радиусами закруглений, а также слабая тяга «линейного электродвигателя». Наконец, практически без внимания авторов осталась важнейшая задача торможения! Поскольку для торможения транспортного средства необходимо надежное сцепление его колес с ходовым путем, цельнометаллическая эстакада представляется не лучшим вариантом. Для решения задачи бетон предпочтительнее, поскольку обеспечивает наибольший среди дешевых материалов коэффициент сцепления. Хотя металлическую балку, в отличие от бетонной, гораздо проще выполнить криволинейной, точное соответствие между ее реальной боковой поверхностью и расчетной траекторией движения на каждом отдельном отрезке ходового пути гарантировать трудно. Поскольку направляющие горизонтальные колеса взаимодействуют именно с боковой поверхностью балки, при увеличении скорости неизбежны колебания и толчки.
Очевидно, что идея монорельса как монолитного, цельного несущего элемента полностью себя исчерпала. Налицо ситуация, которая в теории решения изобретательских задач (ТРИЗ) носит название «технического противоречия». Выход из противоречия возможен только за счет разделения функций элементов ходового пути по образу железнодорожного полотна. Необходимо ввести в конструкцию специальные боковые детали, допускающие плавный изгиб и при этом сохраняющие заданную форму после точной подгонки.
Итак, задачей настоящего изобретения является разработка конструкции монорельсового ходового пути, гарантирующей точное соответствие между расчетной и реальной траекториями движения, прежде всего в плане (в горизонтальной плоскости).
По 1-му пункту формулы изобретения задача решается за счет признаков, общих с прототипом, таких как монорельсовый ходовой путь в виде эстакады, имеющий горизонтальные боковые выступы и набор поверхностей качения для основных ходовых и вспомогательных направляющих колес транспортного средства, и отличительных существенных признаков - ходовой путь представляет собой ряд прямолинейных балок, установленных на опорах, при этом по всей длине пути боковые выступы снабжены съемными направляющими элементами, прикрепленными к боковым выступам таким образом, что боковые поверхности указанных элементов выполняют роль поверхностей качения направляющих колес.
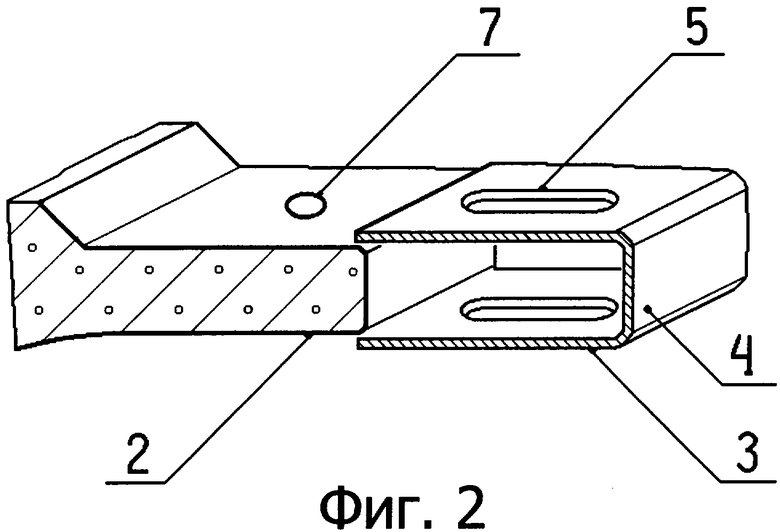
Пункт 2 формулы конкретизирует форму направляющих элементов. Направляющие элементы охватывают боковые выступы балок, выполнены из листового металла и в профиле имеют форму буквы «П», повернутой на 90 градусов.
Пункт 3 формулы уточняет крепление направляющих элементов. Направляющие элементы имеют на своих верхних и нижних плоскостях поперечные прорези для фиксирующих болтов, при этом в боковых выступах балок имеются отверстия цилиндрической формы.
Ходовой путь предназначен для движения транспортного средства, примерно соответствующего по конструкции прототипу. Единственной разницей является перестановка горизонтальных боковых роликов, задающих траекторию движения.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение иллюстрируется чертежами, поясняющими конструктивную идею в общих чертах. На фиг.1 дано поперечное сечение ходового пути (одна из двух зеркально-симметричных половин), на фиг.2 отдельно показан направляющий элемент.
Позициями обозначены: 1 - несущая бетонная балка, 2 - боковой выступ несущей балки, 3 - металлический съемный направляющий элемент, 4 - боковая поверхность направляющего элемента (фиг.1), 5 - прорези для болтов (фиг.2), 6 - затяжные болты (фиг.1), 7 - цилиндрические отверстия в боковых выступах, 8 - опорное колесо, 9 - боковое направляющее колесо, 10 - нижнее колесо угловой стабилизации (фиг.1).
Главной особенностью предлагаемого ходового пути следует считать использование только стандартных прямолинейных балок, что нашло отражение в формуле изобретения. На криволинейных участках трассы балки образуют ломаную линию, тогда как точная траектория движения задается направляющими элементами 3.
Вот некоторые расчеты, подтверждающие целесообразность предлагаемого технического решения.
Для транспортных средства общественного пользования вполне допустимыми считаются ускорения а˜1 м/сек2, или 0,1 g (g - ускорение свободного падения). Если скорость транспортного средства составляет 110 км/час (32 м/сек), то минимальный радиус закругления определяется по формуле
R=ν2/a=1000 м.
С другой стороны, максимальное расхождение между ломаной линией и окружностью можно оценить по формуле
ΔR=l2/8R, где l - длина балки.
Если принять длину балки равной 20 м, величина расхождения ΔR=0,05 м (5 см). Реально это означает, что ближе к концам балки направляющий элемент 3 должен быть выдвинут на 2,5 см от его среднего положения, тогда как в средней части балки он должен быть равномерно «утоплен» на те же 2,5 см (с противоположной стороны несущей балки будет иметь место обратная картина).
Вероятно, на практике придется предусмотреть больший диапазон регулировки из-за неточности установки самих балок на опорах. Также вероятно, что понадобится периодическая проверка и последующая «калибровка» монорельсового ходового пути для компенсации сезонных подвижек грунта и прочих внешних причин. Даже железнодорожное полотно с его мощной балластной призмой (насыпью) подвергается деформациям и требует постоянного контроля, а любая сборная эстакада в отношении долговременной стабильности заметно уступает классической наземной конструкции.
Можно со всей определенностью сказать, что создание высокоточного монорельсового ходового пути для скоростного транспортного средства возможно только при наличии элементов, допускающих многократную регулировку и подгонку.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАПРАВЛЯЮЩИЙ ЭЛЕМЕНТ ХОДОВОГО ПУТИ | 2007 |
|
RU2354568C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ("МЕТРОБУС") | 2005 |
|
RU2297934C1 |
| ХОДОВОЙ ПУТЬ ДЛЯ МОНОРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2264316C1 |
| МОНОРЕЛЬСОВАЯ ДОРОГА НАВЕСНОГО ТИПА | 2002 |
|
RU2219083C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2007 |
|
RU2336189C1 |
| МОНОРЕЛЬСОВЫЙ ХОДОВОЙ ПУТЬ И ТРАНСПОРТНОЕ СРЕДСТВО | 2004 |
|
RU2269444C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2016 |
|
RU2622328C1 |
| Монорельсовая система | 1977 |
|
SU810538A1 |
| ПОДВЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2302955C1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
Изобретение относится к монорельсовому ходовому пути. Монорельсовый ходовой путь выполнен в виде эстакады. Он имеет горизонтальные боковые выступы и набор поверхностей качения для основных ходовых и вспомогательных направляющих колес транспортного средства. Монорельсовый ходовой путь представляет собой ряд прямолинейных балок, установленных на опорах. По всей длине пути боковые выступы снабжены съемными направляющими элементами, прикрепленными к боковым выступам таким образом, что боковые поверхности указанных элементов выполняют роль поверхностей качения направляющих колес. В результате создана конструкция монорельсового ходового пути, в которой гарантируется точное соответствие между расчетной и реальной траекториями движения транспортного средства. 2 з.п. ф-лы, 2 ил.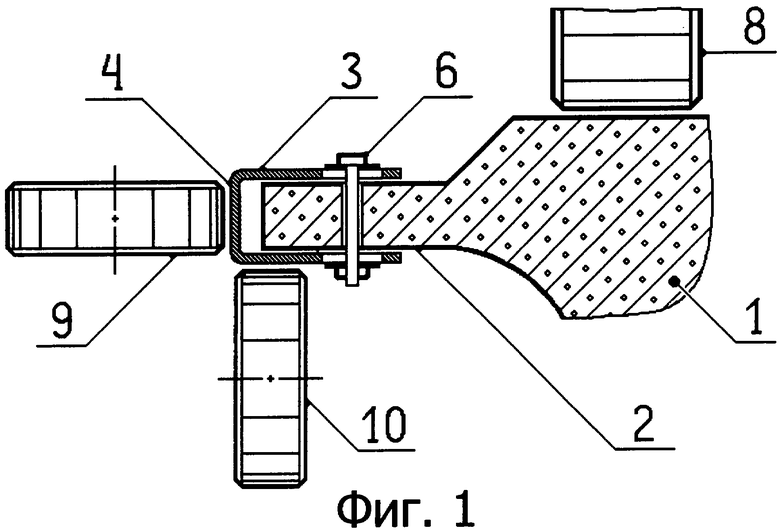
| US 3710727 А, 16.01.1973 | |||
| СПОСОБ ПРОТОННОЙ ТЕРАПИИ СОЛИДНОЙ КАРЦИНОМЫ ЭРЛИХА | 2023 |
|
RU2808984C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("МЕТРОБУС") | 2005 |
|
RU2297934C1 |
| RU 2167403 C1, 20.05.2001. | |||

