Изобретение относится к технологическим транспортным системам и предназначено для решения специальных логистических задач территориально-распределенных производственных и эксплуатационных структур и комплексов. Предложенная система содержит трассу, выполненную в виде четырехбалочной продольноосевой системы, содержащей двухопорный направляющий путь, расположенной, в зависимости от характеристик местности и требуемого режима эксплуатации, частично или полностью в цилиндрических трубчатых секциях имеющих надземное, эстакадное, подвесное, подземное, подводное, открытое, закрытое и герметически закрытое исполнение, перемещающиеся по трассе автономные транспортные модули с несущими кузовами и парными блоками ходовых и горизонтальных стабилизационных колес, закрепленных на уровне центра тяжести транспортных модулей. Тяговый линейный электропривод выполнен с пассивными элементами, продольно установленными на боковых стенках транспортных модулей над парными блоками ходовых и горизонтальных стабилизационных колес, и активными элементами в виде блоков индукторов, установленных на верхних балках четырехбалочной системы направляющего пути в количестве, необходимом для преодоления сил сопротивления движению на профиле каждого участка трассы. Система характеризуется повышенными тягово-динамическими и эксплуатационными показателями, в частности адаптивностью к местности прокладки трассы и надежностью работы в любых климатических зонах. 3 ил.
Изобретение относится к технологическим транспортным системам, а именно к грузопроводным системам с тяговым линейным электроприводом и может быть использовано в качестве высокоэффективного технологического транспортного средств для решения специальных логистических задач территориально-распределенных производственных и эксплуатационных структур и комплексов.
Грузопроводные транспортные системы обладают рядом преимуществ перед другими видами транспорта. К этим преимуществам можно отнести следующее: трасса не требует строительства бетонного или грунтового полотна и, в зависимости от характеристик местности и требуемого режима эксплуатации, собирается частично или полностью в цилиндрических трубчатых секциях в надземном, эстакадном, подвесном, подземном, подводном, открытом, закрытом и герметически закрытом исполнении при этом надземная прокладка трассы может быть выполнена при помощи стандартных опор трубопроводных систем, балочных систем, специальных эстакад и мостов, висячей на канатах, вантах, цепях и т.д., а подземная с применением в т.ч. технологии бесканальной прокладки; грузопроводная транспортная система в большинстве случаев обеспечивает непрерывную, надежную и безопасную эксплуатацию при самых неблагоприятных погодных условиях в любой климатической зоне; стоимость постройки грузопроводной системы меньше стоимости монорельсовой системы (в 3…5 раз); модульная система тягового линейного электропривода делает возможной распределение требуемой мощности по участкам трассы в соответствии с их профилем и реализуемой динамики движения автономных транспортных модулей позволяя повысить величины преодолеваемых уклонов и улучшить динамические характеристики и проходимость системы.
Из перечисленных особенностей грузопроводной системы следует, что этот вид технологического транспорта имеет преимущества перед существующими видами и применение его является экономически целесообразным для решения специальных логистических задач территориально-распределенных производственных и эксплуатационных структур и комплексов, а также освоения арктических территорий и геологически перспективных площадей. При этом реализация тягового линейного электропривода базируется на известном принципе осуществления скоростной тяги.
Известен транспортный комплекс, включающий однорельсовую транспортную систему с ходовой балкой на опорах, перемещающимся по балке подвижным составом, стрелочными переводами и эстакадой, при этом стрелочные переводы монорельсовой транспортной системы установлены в концах трассы за конечными станциями (см. патент на изобретение РФ №2181328, кл. В61В 13/04, оп. в 2002 г.). В этом транспортном комплексе ходовая балка выполнена в виде полого короба прямоугольного сечения. Этот комплекс с тихоходным подвижным составом предназначен для условий эксплуатации в городе, поэтому направлен на решение проблем безопасности движения и стыковки с объектами инфраструктуры города.
Известна монорельсовая транспортная система, включающая ходовую балку, расположенную на опорах и выполненную Т-образного поперечного сечения, а также вагоны, содержащие опорные колеса для опоры на рельс, боковые колеса для ограничения поперечного смещения, и оппозитно размещенные опорным дополнительные колеса для ограничения вертикального смещения, при этом нижняя поверхность вагонов выполнена профилированной (см. патент на изобретение РФ №2327585, кл. В61В 13/04, оп. в 2008 году). В этом устройстве приводы движения выполнены в виде электродвигателей с редукторами, а в вагонах установлены маховики с преобразователями движения. Вагоны перемещаются с использованием энергии маховиков, установленных в вагонах, а маховики раскручивают, приводя в сцепление с приводами на станциях во время остановок. Такой достаточно технически сложный способ приведения поезда в движение не может быть использован как рабочий привод для автономного транспортного модуля автоматической транспортной системы. Кроме того, тяжелая металлоемкая конструкция Т-образного монорельса значительно снижает его эффективность.
Известен направляющий путь для транспортного средства содержащий два опорных элемента и продольный элемент, связанные между собой поперечными элементами и соединенные с концами наклонных элементов, (см. патент РФ №2181087, кл. Е01В 25/10, оп. в 2008 году). Это техническое решение имеет отношение кмонорельсовым дорогам, вспомогательным опорным рельсам, опорным поверхностям и соединительным элементам для монорельсовых дорог. Направляющий путь для транспортного средства содержит два опорных элемента и продольный элемент, связанные между собой поперечными элементами и соединенные с концами наклонных элементов. Поперечные и наклонные элементы выполнены в виде пластин. Технический результат заключается в удешевлении конструкции направляющего пути с одновременным повышением его жесткости, исключающей возникновение колебаний опорных элементов. Однако основным недостатком такого решения является невозможность взаимодействия с направляющим путем цилиндрических стальных колес как в вертикальной, так и горизонтальной плоскостях.
Известно транспортное средство для движения в трубопроводе, содержащее шасси с продольной осью, первый колесный узел, установленный на первом конце шасси, второй колесный узел, установленный на втором конце шасси, при этом каждый колесный узел включает несколько колес, каждое из которых имеет ось вращения, расположенную под углом к продольной оси шасси, и средства вращения первого и второго колесных узлов в независимых друг от друга направлениях, а каждое колесо имеет форму осесимметричного тела с большим и малым концами и установлено с одной стороны своим большим концом на колесном плече (см. патент на изобретение РФ №2474750, кл. F16L 55/26, оп. в 2012 году). Это транспортное средство предназначено для транспортировки тяжелых протяженных грузов (например, кабелей) в трубопроводе в сложных условиях, например в коллекторах. Его невозможно использовать для быстрой автоматической доставки грузов обеспечивающих технологические процессы.
Известна тележка монорельсового транспорта, включающая раму и смонтированные на своих осях приводные пары колес, установленные с возможностью взаимодействия с вертикальными стенками монорельса, и несущие пары колес, установленные с возможностью взаимодействия с дорожным полотном, причем оси соседних приводных и несущих колес связаны двуплечими Г-образными рычагами, шарнирно установленными на кронштейнах рамы (см. полезную модель РФ №99407, кл. В61В 13/04, оп. в 2010 году). Это техническое решение имеет отношение к монорельсовому транспорту со сложным сечением монорельса, представляющим собой перевернутый тавр, полки которого в верхней зоне скошены под углом к центральной стойке. Такая конструкция монорельса позволяет использовать в тележке помимо основных несущих колес, взаимодействующих с вертикальной стойкой монорельса, еще и упорные ролики, взаимодействующие с наклонными полками тавра. Однако основным недостатком такой тележки является ее недостаточная устойчивость на высоких скоростях.
Известно техническое решение по перевозке пассажиров или грузов в отдельных транспортных средствах, перемещаемых между станциями через отдельные коммуникационные коридоры, управляемых централизованно и автономно (см. опубликованную заявку US 2009299563, кл. B60F 1/00, оп. в 2009 году). Эти средства передвижения предусматривают автоматизированную перевозку пассажиров монорельсовым транспортом, но не решают вопросы адресной доставки грузов.
Наиболее близким техническим решением к предложенному изобретению является многофункциональный городской комплекс и автоматизированная подземная система адресной доставки грузов включающей подающие устройства и зону формирования заказов в контейнерах, связанную посредством доставочного устройства, включающего магистральные трубопроводы, с пунктами назначения, (см. патент на изобретение РФ №2526202, кл. B65G 51/04, оп. в 2014 году).
Недостаток указанной транспортной системы заключается в ее низкой надежности работы, обусловленной применением, подверженного отказам, электромеханического привода самоходных тележек.
Настоящее изобретение направлено на решение технической задачи развития системы высокоскоростного технологического транспорта с тяговым линейным электроприводом при повышении надежности, эксплуатационных показателей и логистических возможностей этой системы.
Поставленная цель достигается тем, что система содержит трассу, выполненную в виде четырехбалочной продольноосевой системы, содержащей двухопорный направляющий путь и две верхние балки несущие активные элементы в виде блоков индукторов, расположенную, в зависимости от характеристик местности и требуемого режима эксплуатации, частично или полностью в цилиндрических трубчатых секциях имеющих надземное, эстакадное, подвесное, подземное, подводное, открытое, закрытое либо герметически закрытое исполнение, перемещающиеся по трассе автономные транспортные модули с грузовыми кузовами и парными блоками ходовых и горизонтальных стабилизационных колес, закрепленными на уровне центра тяжести автономных транспортных модулей и взаимодействующих с Т-образными профилями направляющего пути в вертикальной и горизонтальной плоскостях. Тяговый линейный электропривод выполнен с пассивными элементами, установленными горизонтально на боковых стенках транспортных модулей над парными блоками ходовых и горизонтальных стабилизационных колес, и активными элементами в виде блоков индукторов, установленных на стыках верхних балок четырехбалочной системы направляющего пути в количестве, необходимом для преодоления сил сопротивления движению на профиле каждого участка. Автоматическое управление движением автономных транспортных модулей осуществляется дискретной энергоподачей на блоки индукторов. Система характеризуется повышенными тягово-динамическими и эксплуатационными показателями, в частности адаптивностью к местности прокладки трассы и надежностью работы в любых климатических зонах.
Других известных технических решений с подобной совокупностью существенных признаков при проведении поиска по научно-технической литературе и патентной документации заявителями не обнаружено. Грузопроводная транспортная система может быть изготовлена оборудовании и собрана с использованием стандартных стальных труб и технологий монтажа газопроводов. Поэтому она соответствует критерию «промышленная применимость».
Основные технические особенности и преимущества предлагаемого технического решения описаны в представленном предпочтительном варианте осуществления, объем защиты изобретения не ограничивается описанным примером, а включает различные варианты исполнения в соответствии с общей концепцией. В частности, транспортная систем в открытом варианте является всего лишь одним из ряда возможных конструктивных решений.
Сущность изобретения поясняется чертежами, на которых показан пример выполнения грузопроводной транспортной системы в соответствии с изобретением.
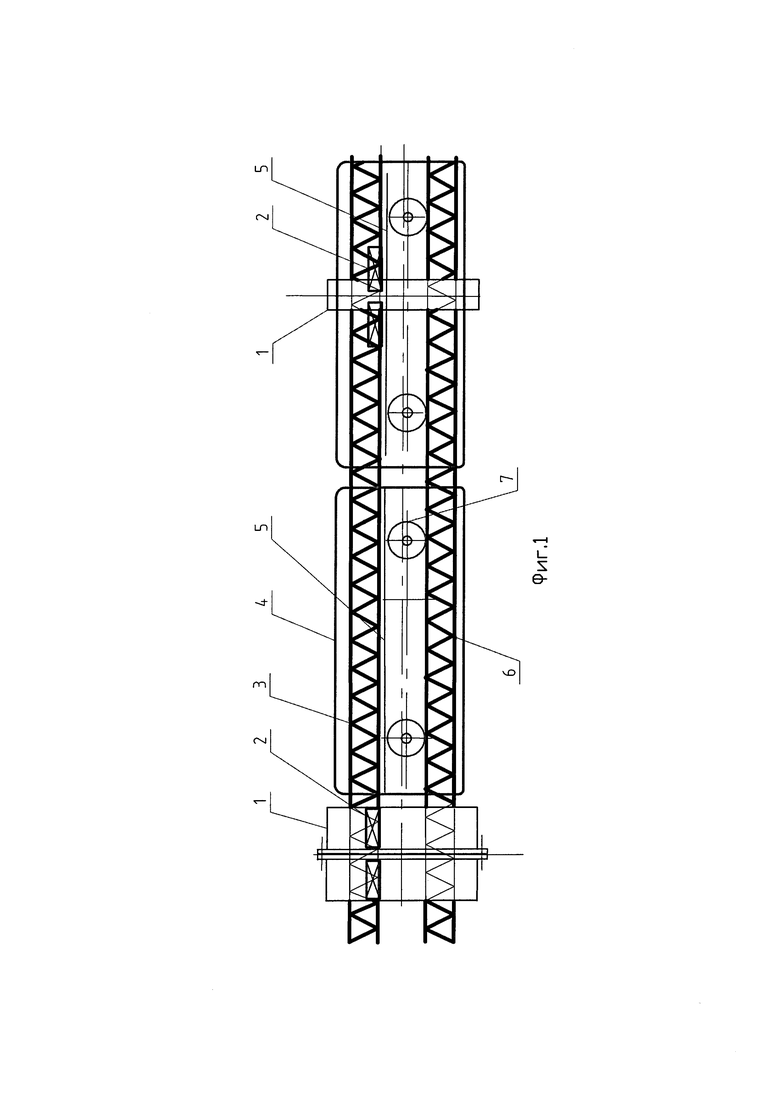
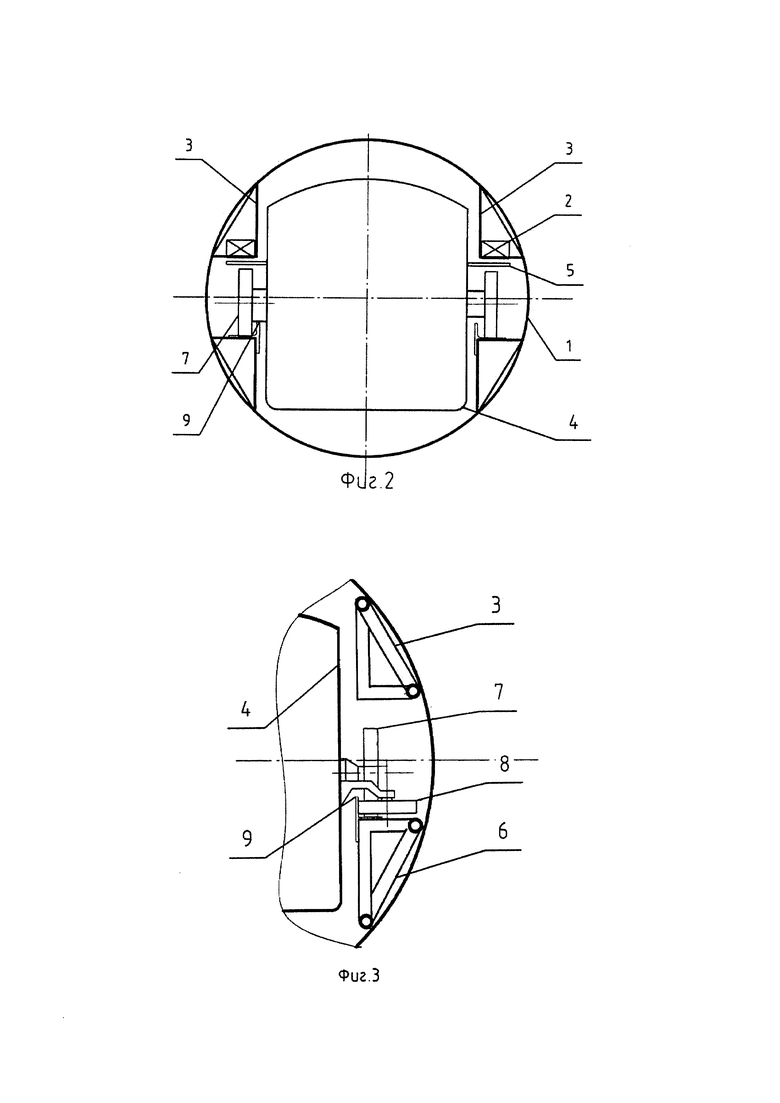
На фиг. 1 представлена трасса с автономными транспортными модулями, на фиг. 2 показано поперечное сечение трассы, на фиг. 3 показан блок ходовых и горизонтальных стабилизационных колес.
На фигурах обозначены: цилиндрические трубчатые секции 1, блок индукторов 2, верхние балки 3, автономный транспортный модуль 4, пассивные элементы 5, направляющий путь 6, ходовые колеса 7, горизонтальные стабилизационные колеса 8, Т-образный профиль направляющего пути 9.
По трассе, выполненной в виде четырехбалочной продольноосевой системы, содержащей двухопорный направляющий путь 6 и две верхние балки 3 несущие активные элементы в виде блоков индукторов 2, расположенную, в зависимости от характеристик местности и требуемого режима эксплуатации, частично или полностью в цилиндрических трубчатых секциях 1 имеющих надземное, эстакадное, подвесное, подземное, подводное, открытое, закрытое либо герметически закрытое исполнение, перемещаются автономные транспортные модули 3 с грузовыми кузовами и парными блоками ходовых 7, воспринимающих вертикальную нагрузку, и горизонтальных, воспринимающих горизонтальные нагрузки, стабилизационных колес 8, закрепленными на уровне центра тяжести загруженного автономного транспортного модуля 4. Тяговый линейный электропривод, выполненный с пассивными элементами 5, установленными горизонтально на боковых стенках транспортных модулей 4 над парными блоками ходовых 7 и горизонтальных стабилизационных колес 8, и активными элементами в виде блоков индукторов 8, установленных на стыках верхних балок 3 четырехбалочной системы направляющего пути создает тяговую силу, необходимую для преодоления сил сопротивления движению на профиле каждого участка. Автоматическое управление движением автономных транспортных модулей осуществляется дискретной энергоподачей на блоки индукторов. Система характеризуется повышенными тягово-динамическими и эксплуатационными показателями, в частности адаптивностью к местности прокладки трассы и надежностью работы в любых климатических зонах.
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
1. Патент РФ RU №2181328, МПК В61В 13/04, оп. в 2002 году. Транспортный комплекс, включающий однорельсовую транспортную систему с ходовой балкой на опорах, перемещающимся по балке подвижным составом, стрелочными переводами и эстакадой, при этом стрелочные переводы монорельсовой транспортной системы установлены в концах трассы за конечными станциями (см. патент на изобретение РФ №2181328, кл. В61В 13/04, оп. в 2002 г.).
2. Патент РФ RU №2327585, МПК В61В 13/04 оп. в 2008 году. Монорельсовая транспортная система, включающая ходовую балку, расположенную на опорах и выполненную Т-образного поперечного сечения, а также вагоны, содержащие опорные колеса для опоры на рельс, боковые колеса для ограничения поперечного смещения, и оппозитно размещенные опорным дополнительные колеса для ограничения вертикального смещения, при этом нижняя поверхность вагонов выполнена профилированной (см.). В этом устройстве приводы движения выполнены в виде электродвигателей с редукторами, а в вагонах установлены маховики с преобразователями движения. Вагоны перемещаются с использованием энергии маховиков, установленных в вагонах, а маховики раскручивают, приводя в сцепление с приводами на станциях во время остановок.
3. Патент РФ RU №2181087, МПК Е01В 25/10, оп. в 2008 году. Направляющий путь для транспортного средства содержащий два опорных элемента и продольный элемент, связанные между собой поперечными элементами и соединенные с концами наклонных элементов, (см.) Это техническое решение имеет отношение к монорельсовым дорогам, вспомогательным опорным рельсам, опорным поверхностям и соединительным элементам для монорельсовых дорог. Направляющий путь для транспортного средства содержит два опорных элемента и продольный элемент, связанные между собой поперечными элементами и соединенные с концами наклонных элементов. Поперечные и наклонные элементы выполнены в виде пластин. Технический результат заключается в удешевлении конструкции направляющего пути с одновременным повышением его жесткости, исключающей возникновение колебаний опорных элементов.
4. Патент РФ RU №2474750, МПК F16L 55/26, оп. в 2012 году. Транспортное средство для движения в трубопроводе, содержащее шасси с продольной осью, первый колесный узел, установленный на первом конце шасси, второй колесный узел, установленный на втором конце шасси, при этом каждый колесный узел включает несколько колес, каждое из которых имеет ось вращения, расположенную под углом к продольной оси шасси, и средства вращения первого и второго колесных узлов в независимых друг от друга направлениях, а каждое колесо имеет форму осесимметричного тела с большим и малым концами и установлено с одной стороны своим большим концом на колесном плече (см. патент на изобретение). Это транспортное средство предназначено для транспортировки тяжелых протяженных грузов (например, кабелей) в трубопроводе в сложных условиях, например в коллекторах.
5. Патент РФ RU №2526202, МПК B65G 51/04, оп. в 2014 году. Многофункциональный городской комплекс и автоматизированная подземная система адресной доставки грузов включающей подающие устройства и зону формирования заказов в контейнерах, связанную посредством доставочного устройства, включающего магистральные трубопроводы, с пунктами назначения.
6. Полезная модель РФ №99407, кл. В61В 13/04, оп. в 2010 году. Это техническое решение имеет отношение к монорельсовому транспорту со сложным сечением монорельса, представляющим собой перевернутый тавр, полки которого в верхней зоне скошены под углом к центральной стойке. Такая конструкция монорельса позволяет использовать в тележке помимо основных несущих колес, взаимодействующих с вертикальной стойкой монорельса, еще и упорные ролики, взаимодействующие с наклонными полками тавра. Однако основным недостатком такой тележки является ее недостаточная устойчивость на высоких скоростях.
7. Опубликованная заявка US 2009299563, кл. B60F 1/00, оп. в 2009 году. Техническое решение по перевозке пассажиров или грузов в отдельных транспортных средствах, перемещаемых между станциями через отдельные коммуникационные коридоры, управляемых централизованно. Эти средства передвижения предусматривают автоматизированную перевозку пассажиров монорельсовым транспортом, но не решают вопросы адресной доставки грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом | 2017 |
|
RU2681574C2 |
| Подвижной состав монорельсовой транспортной системы | 2021 |
|
RU2762708C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| СКОРОСТНАЯ АВТОНОМНАЯ ТРАНСПОРТНАЯ СИСТЕМА ПОДВЕСНОГО ТИПА "СТРАУС" Шумовского | 2017 |
|
RU2656742C1 |
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, ПОЛАЯ ХОДОВАЯ БАЛКА (ВАРИАНТЫ), ХОДОВАЯ ТЕЛЕЖКА (ВАРИАНТЫ), ПОДВИЖНОЙ СОСТАВ (ВАРИАНТЫ) | 2011 |
|
RU2494897C2 |
| ПОСАДОЧНЫЙ МОДУЛЬ МОНОРЕЛЬСОВОЙ ДОРОГИ ДЛЯ ТРАНСПОРТНОЙ СИСТЕМЫ | 2010 |
|
RU2438893C1 |
| ПОДВЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2302955C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ("МЕТРОБУС") | 2005 |
|
RU2297934C1 |
Изобретение относится к технологическим транспортным системам. Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом содержит трассу, выполненную в виде четырехбалочной продольноосевой системы. Двухопорный направляющий путь 6 и балки 3 с размещенными на них блоками индукторов 2 расположены частично или полностью в цилиндрических трубчатых секциях 1. По направляющему пути 6 перемещаются автономные транспортные модули 4 с парными блоками ходовых 7 и горизонтальных стабилизационных колес 8 и пассивными элементами 5 тягового линейного электропривода. В результате повышаются тягово-динамические, эксплуатационные и энергетические показатели, надежность работы в любых климатических зонах, адаптивность к условиям местности прокладки трассы. 14 з.п. ф-лы, 3 ил.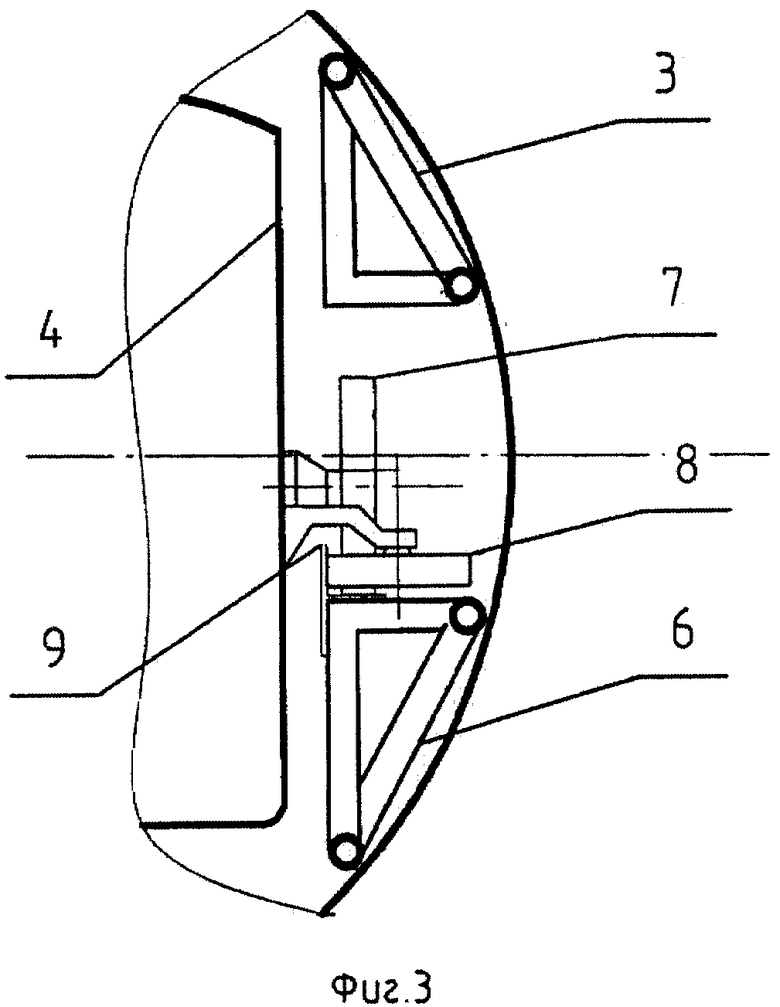
1. Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом, содержащая трассу, выполненную в виде четырехбалочной продольноосевой системы, включающей двухопорный направляющий путь и балки с размещенными на них блоками индукторов, установленную, в зависимости от характеристик местности и требуемого режима эксплуатации, частично или полностью в цилиндрических трубчатых секциях, с перемещающимися по трассе автономными транспортными модулями с парными блоками ходовых и горизонтальных стабилизационных колес, с пассивными элементами, установленными на транспортных модулях, и активными элементами, установленными на продольных балках.
2. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что продольные элементы балок направляющего пути трассы выполнены в виде таврового профиля.
3. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что значение мощности каждого блока индукторов соответствует профилю преодолеваемого участка местности и требуемому режиму эксплуатации.
4. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что четырехбалочная продольноосевая система трассы монтируется в цилиндрических трубчатых секциях различной длины, определяемой видом исполнения.
5. Автоматическая грузопроводная транспортная система по п. 4, отличающаяся тем, что трасса и ее участки выполнены в надземном, эстакадном, подвесном, подземном, подводном, открытом, закрытом и герметически закрытом виде.
6. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что парные блоки ходовых и горизонтальных стабилизационных колес закреплены на уровне центра тяжести транспортных модулей.
7. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что пассивные элементы тягового линейного электропривода выполнены в виде пластин с длиной, равной длине транспортного модуля.
8. Автоматическая грузопроводная транспортная система по п. 7, отличающаяся тем, что пластины пассивных элементов тягового линейного электропривода установлены горизонтально вдоль внешних боковых поверхностей транспортных модулей над парными блоками ходовых и горизонтальных стабилизационных колес.
9. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что активные элементы тягового линейного электропривода в виде блоков индукторов дискретно установлены по длине верхних продольных балок над пластинами пассивных элементов тягового линейного электропривода.
10. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что образующийся номинальный зазор между поверхностями активных и пассивных элементов тягового линейного электропривода не зависит от эксплуатационной нагрузки на транспортный модуль.
11. Автоматическая грузопроводная транспортная система по п. 9, отличающаяся тем, что автоматическое управление движением автономных транспортных модулей осуществляется дискретной энергоподачей на активные элементы тягового линейного электропривода.
12. Автоматическая грузопроводная транспортная система по п. 9, отличающаяся тем, что активные элементы тягового линейного электропривода в виде блоков индукторов установлены внутри пространственной конструкции верхних продольных балок и защищены от внешних механических повреждений.
13. Автоматическая грузопроводная транспортная система по п. 2, отличающаяся тем, что ездовые дорожки для ходовых и горизонтальных стабилизационных колес образованы Т-образными профилями направляющего пути в вертикальной и горизонтальной плоскостях.
14. Автоматическая грузопроводная транспортная система по п. 1, отличающаяся тем, что горизонтальные стабилизационные колеса автономных транспортных модулей закреплены на уровне его центра тяжести.
15. Автоматическая грузопроводная транспортная система по п. 14, отличающаяся тем, что автономные транспортные модули не имеют вертикальных стабилизационных колес.
| US 4338864 A, 13.07.1982 | |||
| US 6357359 B1, 19.03.2002 | |||
| Линейный электропривод для рельсового транспортного средства | 1984 |
|
SU1284858A1 |
| Устройство для транспортирования грузов | 1980 |
|
SU948723A1 |

