Изобретение относится к области измерительной техники и может быть использовано для измерения рассогласования оси ствола и оси прицела.
Известны применяемые в артиллерии способ и устройство выверки прицела с пушкой [1]. При этом способе выверки прицела со стволом пушки по мишени на срезе ствола устанавливают перекрестие из тонких нитей, пересекающихся с осью канала ствола, а в казенную часть ствола - трубку выверки. При помощи ручных приводов наводки линию визирования канала ствола, проходящую через трубку выверки и центр перекрестия нитей, совмещают с индексом на выверочной мишени. Недостатками данного способа и устройства является то, что при выверке не учитывается форма канала ствола, т.е. искривление среза ствола.
Известен способ контроля и установки оси длинномерного изделия относительно базовой оси и прибор для его реализации [2]. Этот способ и устройство выбраны в качестве прототипа. К недостаткам этого способа контроля и установки оси длинномерного изделия относительно базовой оси и устройства, его реализующего, можно отнести то, что способ, заявленный в нем, является не измерительным способом, а выполняющим лишь контрольную функцию заданного направления, например осей труб относительно некоторого базового направления, заданного при помощи визирного канала, кроме того, он является очень трудоемким и занимает длительный временной цикл.
Предложенный способ измерения взаимного пространственного расположения осей канала ствола и прицела, а также автоматизированная телевизионно-оптическая система для его реализации позволяет автоматизировать процесс измерения и повысить точность измерения взаимного пространственного расположения осей канала ствола и прицела.
Автоматизация процесса измерения и повышение точности измерения взаимного пространственного расположения осей канала ствола и прицела достигается тем, что в заявляемой автоматизированной телевизионно-оптической системе, содержащей головку измерительную с электронно-оптическим блоком (ЭОБ) и опорами, телекамеру с прибором с зарядовой связью (ПЗС-матрицей), ЭВМ с монитором, соединенные с телекамерой, дополнительно введен еще один ЭОБ; головка измерительная содержит фиксирующее устройство (ФУ), поворотное устройство (ПУ), внутри которого закреплен ЭОБ и электрогидропривод, корпуса ФУ и ПУ выполнены таким образом, что их оси могут радиально смещаться относительно друг друга в вертикальной и горизонтальных прорезях плоской шайбы, сидящей на полом валу электропривода, кроме того, ПУ выполнено с возможностью поджатия корпуса ПУ к внутренней поверхности канала ствола, поворота его на 360° и фиксации через каждые 45° с помощью опор и электропривода и гидропривода; корпус поворотного устройства выполнен в виде цилиндра, торцы которого закрывают два фланца, имеющие по одному отверстию в центре и по одному прямоугольному вырезу по краю, в котором расположена опора, выполненная на сильфоне, к одному из фланцев прикреплен по центру полый вал электропривода; кроме того, фланцы включают по две жестко закрепленных опоры; корпус ЭОБ выполнен в виде параллелепипеда со срезанными углами и содержит телекамеру и четыре зеркала, расположенные в срезанных углах параллелепипеда под углом 45° к горизонтальной оси, зеркало, расположенное перед телекамерой, выполнено полупрозрачным, на торцах параллелепипеда закреплены два тубуса с объективами, причем один из тубусов содержит два источника света, тубусы имеют два наружных цилиндрических пояска, с помощью которых корпус ЭОБ установлен на призмы, расположенные в поворотном устройстве, оси цилиндрических поясков совпадают с осью ПЗС-матрицы телекамеры.
Сущность способа измерения взаимного расположения осей канала ствола и прицела заключается в наведении осей ЭОБ, находящихся в канале ствола и на прицеле, на плоскости знаков, причем ЭОБ, находящийся в канале ствола, вращают с помощью ПУ на 360°, фиксируют его через каждые 45° на внутренней поверхности канала ствола с помощью электро- и гидропривода, запоминают изображения марок знака, расположенных сначала на ближнем расстоянии от среза канала ствола, а потом на удаленном расстоянии с помощью ЭВМ, определяют две точки пересечения оси канала ствола с плоскостями ближнего и дальнего знаков; одновременно другой ЭОБ помещают на окуляр прицела и запоминают с помощью ЭВМ точку экрана на мониторе, на которую проецируется центр изображения прицельной метки, затем с помощью ЭОБ получают изображения поочереди или одновременно дальнего и ближнего знаков, затем с помощью ЭВМ вычисляют координаты проекции центра прицельной метки на плоскость ближнего и дальнего знаков в его системе координат; по координатам четырех точек, полученных при пересечении осей канала ствола и прицела с плоскостями ближнего и дальнего знаков, вычисляют четыре параметра, характеризующие рассогласование осей ствола и прицела, а именно горизонтальный угол смещения оси ствола и оси прицела, вертикальный угол смещения оси ствола и оси прицела, горизонтальное смещение оси ствола и оси прицела, вертикальное смещение оси ствола и оси прицела.
На фиг.1 показана схема пространственного расположения оси канала ствола и оси прицела, где обозначено:
1 - ближнее расположение знака с марками;
2 - дальнее расположение знака с марками;
3 - направление оси канала ствола и координаты (x1 уi; х2 у2) точки пересечения ее с ближним и дальним расположением знака к срезу канала ствола;
4 - направление оси прицела ствола и координаты (x'1 у'1; x'2 у'2) точки пересечения ее с ближним и дальним расположением знака к срезу канала ствола.
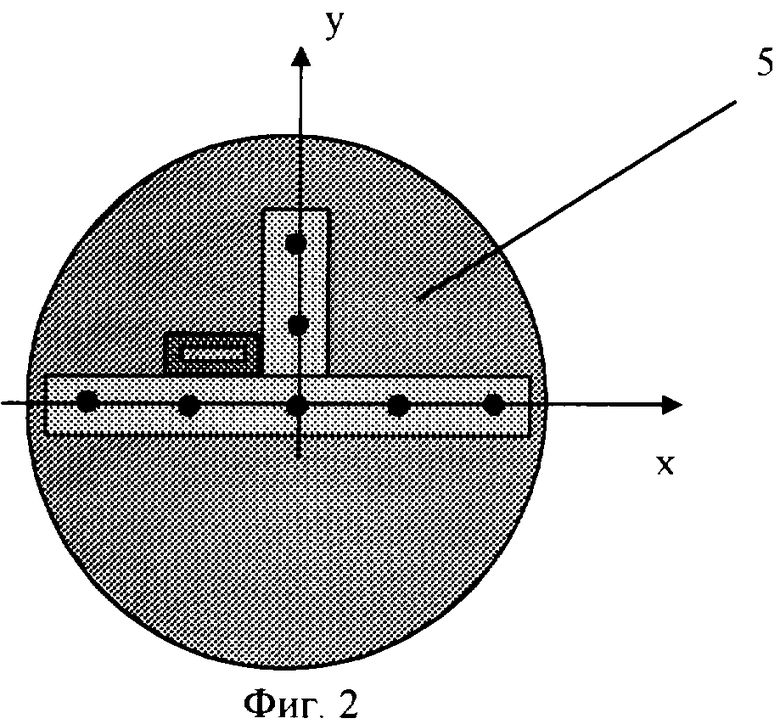
На фиг.2 показан знак с марками, где обозначено:
5 - семь светящихся марок знака.
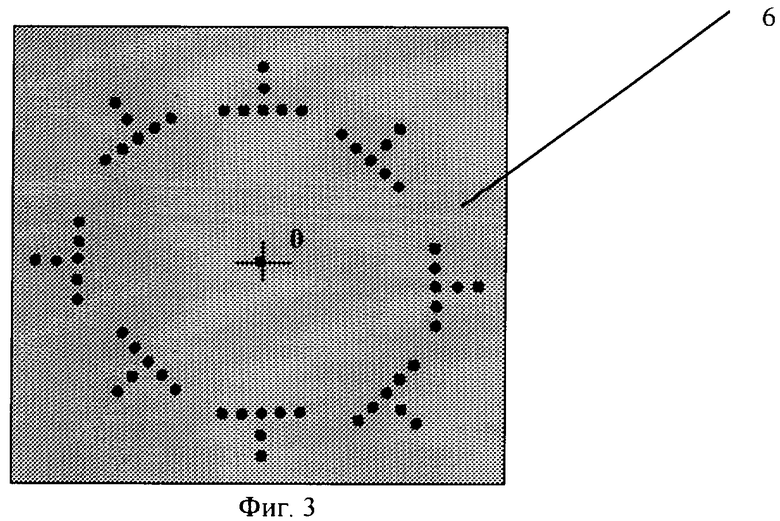
На фиг.3 показан экран монитора с изображением марок знака, где обозначено:
6 - восемь положений изображений на мониторе марок знака с центром в точке «О» при повороте телекамеры на 360°.
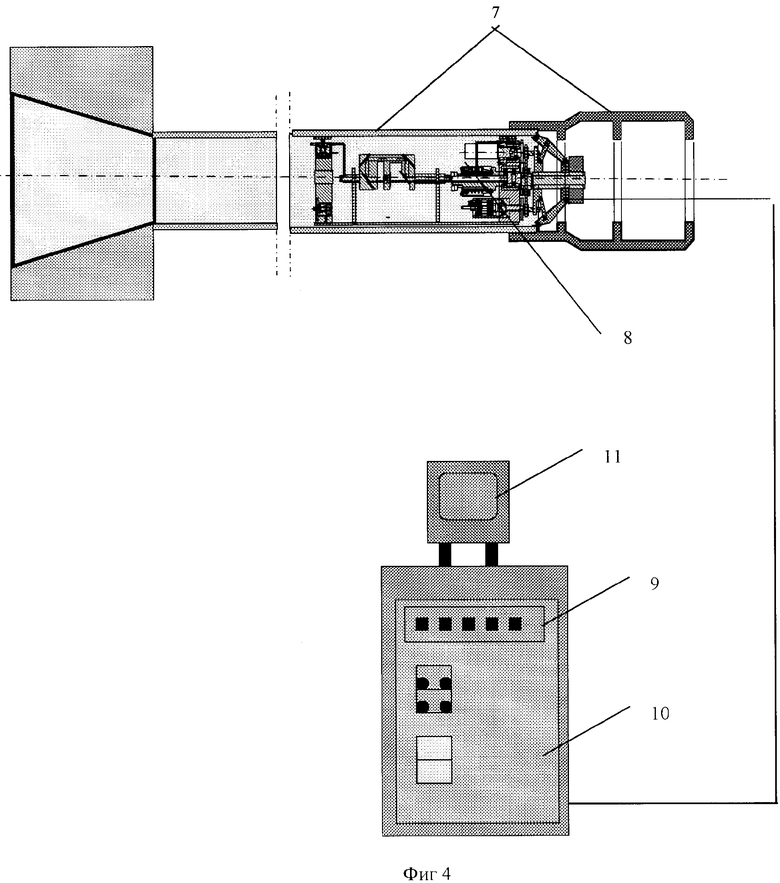
На фиг.4 показана автоматизированная электронно-оптическая система измерения рассогласования осей ствола и прицела, где обозначено;
7 - ствол с дульным тормозом;
8 - головка измерительная;
9 - блок питания и управления (БПУ) с контроллером;
10 - электронно-вычислительная машина (ЭВМ);
11 - монитор;
На фиг.5 показан чертеж ГИ, где обозначено:
12 - электронно-оптический блок (ЭОБ);
13 - поворотное устройство (ПУ);
14 - фиксирующее устройство (ФУ)
На фиг.6 показан чертеж оптического блока ЭОБ, где обозначено:
15 - корпус ЭОБ;
16 - оптический канал в корпусе;
17, 18, 19, 20 - зеркала;
21 - телекамера;
22, 23 - тубусы;
24, 25 - цилиндрические пояски;
26, 27 - объективы;
28, 29 - источники света.
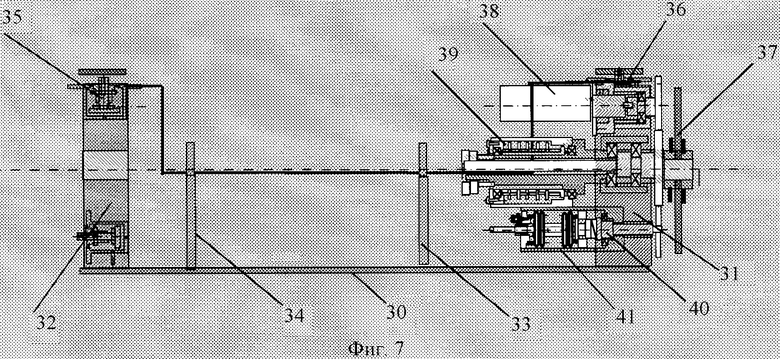
На фиг.7 показан чертеж поворотного устройства, где обозначено:
30 - корпус ПУ;
31, 32 - фланцы;
33, 34 - призмы;
35, 36 - опоры на сильфонах;
37 - шайба;
38 - электропривод;
39 - вал электропривода;
40 - гидропривод;
41 - сильфон гидропривода.
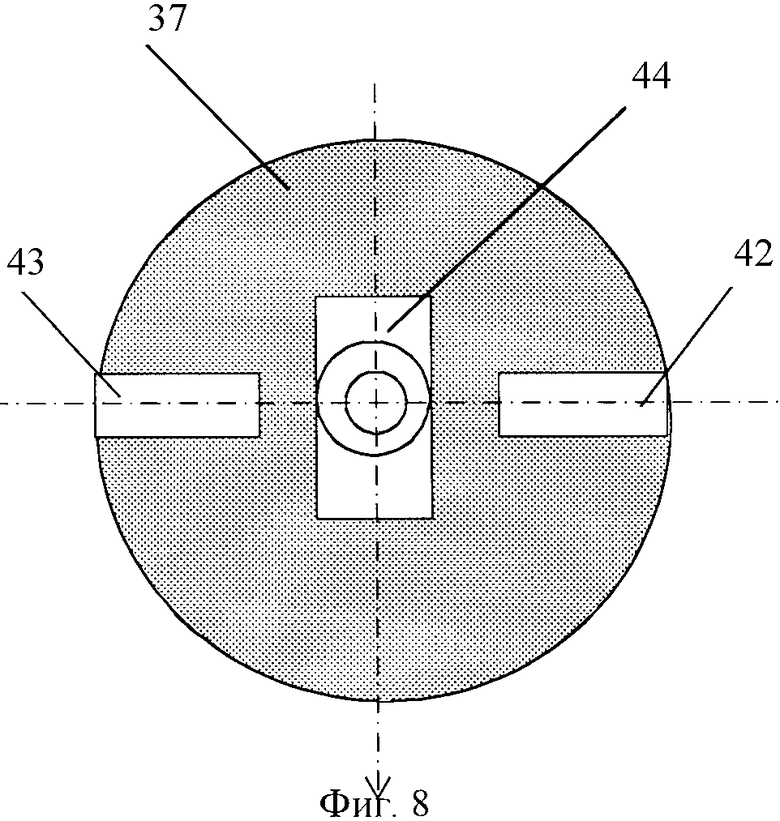
На фиг.8 показана шайба с прорезям, где обозначено:
42, 43 - горизонтальные прорези;
44 - вертикальная прорезь для вала;
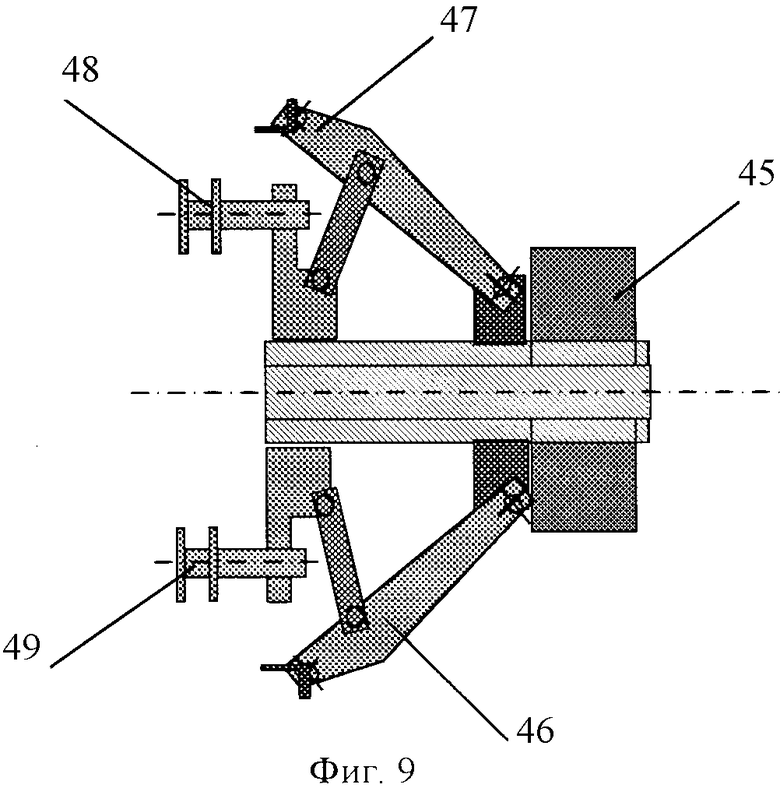
На фиг.9 показан чертеж фиксирующего устройства, где обозначено:
45 - гайка;
46, 47 - рычаги подвижные;
48, 49 - тяги.
Заявляемая автоматизированная телевизионно-оптическая система содержит ГИ 8, блок питания и управления БПУ с контроллером 9, ЭВМ 10 с монитором 11.
ГИ состоит из оптического блока ЭОБ 12, используемого в качестве метрологического инструмента, поворотного устройства ПУ 13 и фиксирующего устройства ФУ 14, причем ось ГИ 8 может свободно радиально смещаться относительно оси ФУ 14 и обеспечивать обкатку ГИ по внутреннему диаметру канала ствола на 360° с фиксацией корпуса ГИ через 45°.
В корпусе ЭОБ 15 расположены четыре зеркала 17, 18, 19, 20 и телекамера 21, через середину всех зеркал по оптической оси телекамеры 21 проходит канал 16. На торцах корпуса ЭОБ закреплены два тубуса 22, 23 с двумя наружными цилиндрическими поясками 24, 25 одинакового диаметра, оси которых совпадают с осью ПЗС-матрицы телекамеры и образуют общую измерительную ось прибора. В тубусах расположены объективы 26, 27, которые имеют возможность перемещаться вдоль оптической оси и вращаться вокруг своей оси с двойным эксцентриситетом, а также два источника света 28, 29. Четыре зеркала 17, 18, 19, 20 расположены в углах корпуса ЭОБ под 45° к горизонтали, зеркало перед телекамерой выполнено полупрозрачным.
Зеркала 17, 18, 19, 20 позволяют проводить обзор ствола одновременно в сторону казенной части ствола и в сторону среза ствола.
Корпус поворотного устройства ПУ выполнен в виде цилиндра, на торцах которого закреплены два фланца 31, 32 с отверстиями по центру и снабженные тремя опорами, две опоры каждого фланца жестко фиксированные, а одна опора (35 или 36) каждого фланца выполнена на упругом элементе (сильфоне). Внутри корпуса ПУ закреплены две призмы 33, 34, на которых жестко фиксируется ЭОБ 12 своими посадочными цилиндрическими поясками 24, 25, расположенными на тубусах 22, 23, которые образуют с поворотным устройством 13 общую приборную ось. На фланце 31 крепится с помощью подшипников вал электропривода 39. С внутренней стороны фланца 31 крепится гидропривод 40 на сильфоне 41.
На полом валу электропривода 39 подвижно сидит шайба 37, имеющая центральную вертикальную прорезь 44 для вала и две горизонтальные прорези 42, 43 по краям для сопряжения с валом ФУ 14 посредством винтов 48, 49. Вертикальная прорезь 44 и горизонтальные прорези 42, 43 шайбы 37 позволяют оси корпуса ПУ 13 радиально смещаться относительно оси ФУ 14 при повороте на 360°.
Работа автоматизированной телевизионно-оптической системы заключается в следующем:
В срез канала ствола вставляют ГИ 8 таким образом, чтобы ФУ 14 оказалось со стороны среза ствола. С помощью гайки 45 разводят рычаги 46, 47 и фиксируют ФУ 14 в канале ствола. По команде ЭВМ 10 через контроллер БПУ 9 осуществляют включение электропривода 38 и гидропривода 40, который заставляет опоры 35, 36 выдвигаться и давить на внутреннюю поверхность канала ствола. Таким образом, корпус ГИ 8 прижимается жесткими опорами к противоположной поверхности канала ствола и фиксируется.
В это время телекамера 21 осуществляет фотографирование изображений ближнего знака. Далее электропривод 38 вращает корпус ПУ 13 относительно корпуса ФУ 14 на 45° и в момент фиксации ПУ 13 телекамера 21 фотографирует следующее положение знака. Вращая таким образом ГИ 8 на 360°, получают на мониторе 11 восемь изображений знака с координатами центра в точке «О», вокруг которой они вращаются. Координаты этой точки являются координатами точки пересечения оси канала ствола с плоскостью знака. Затем такую же операцию повторяют для определения точки пересечения оси канала ствола с плоскостью дальнего знака.
Для определения координат точки пересечения оси прицела с плоскостью знака второй ЭОБ ставят на призмы около прицела и вращают его на 360° и т.о. получают точку пересечения оси прицела с плоскостью знака на ближнем и дальнем расстояниях.
Заявляемый способ измерения взаимного расположения осей ствола и прицела заключается в следующем. В срез ствола помещают измерительную ГИ 8, состоящую из ПУ 13, ЭОБ 15 и ФУ 14. Затем ПУ 13 измерительной головки стопорят в срезе канала ствола посредством ФУ 14.
На местности на определенном расстоянии от среза канала ствола в поле зрения ЭОБ 15 устанавливают знак со светящимися марками. Затем по программе, заложенной в ЭВМ 10, ГИ 8 поворачивают внутри канала ствола относительно неподвижной оси ФУ 14 на 360° с фиксацией через 45°. При фиксированном положении ГИ 8 телекамера ЭОБ осуществляет фотографирование изображений светящихся марок знака и на экране монитора получают восемь положений знака.
ЭВМ с помощью заданной программы анализирует эти изображения и вычисляет координаты той точки знака, вокруг которой изображения поворачиваются. Координаты этой точки в системе знака и вычисляемое программой расстояние до знака определяет точку пересечения оси среза канала ствола с плоскостью знака.
Затем определяют направление оси прицела. На призмах устанавливают ЭОБ, в поле зрения которого должен находиться знак, затем ЭОБ вращают на 360° с фиксацией 45°. Программа анализирует принятые изображения знака и вычисляет координаты той точки, вокруг которой они поворачиваются. Координаты этой точки в системе знака определяют точку пересечения оси прицела с плоскостью знака.
Затем знак на местности перемещают на большее расстояние от среза ствола и проводятся те же операции по определению координат точек пересечения оси ствола и оси прицела с плоскостью удаленного знака, как было изложено выше.
С помощью программы, заложенной в ЭВМ, вычисляют четыре параметра, характеризующие рассогласование осей канала ствола и прицела, по полученным координатам точек пересечений осей с плоскостями ближнего и удаленного знаков:
- горизонтальный угол оси ствола и прицела;
- вертикальный угол оси ствола и прицела;
- горизонтальное смещение оси ствола и прицела;
- вертикальное смешение оси ствола и прицела.
Знание этих четырех параметров позволяет определить смещение оси ствола относительно оси прицела.
Технические решения, положенные в основу построения автоматизированной телевизионно-оптической системы и заявляемого способа, выполнены на современном уровне развития электроники с использованием отечественной элементной базы. Заявляемая система будет использоваться в составе прибора для измерения рассогласования ей канала ствола и прицела (ТПВП) Нижегородского научно-исследовательского приборостроительного института.
Источники информации
1. Теория и конструкция танка. Под редакцией П.П.Исакова. Т.3. Испытания танкового вооружения. - М., Машиностроение, 1983, с.199.
2. Патент №2143097, G01B 5/24, F41G 1/393, Алешин И.Н. Близгарев В.П, Галецкий В.С др. Способ контроля и установки оси длинномерного изделия относительно базовой оси и прибор для его реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения оси канала ствола для выверки прицелов и устройство для его осуществления | 2024 |
|
RU2836658C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ И ВЫВЕРКИ СПАРЕННОГО ПУЛЕМЕТА В ТАНКЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2124174C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЦЕЛОВ НА СТРЕЛКОВОМ ОРУЖИИ | 2013 |
|
RU2535583C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЦЕЛОВ НА СТРЕЛКОВОМ ОРУЖИИ | 2013 |
|
RU2535584C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЦЕЛОВ НА СТРЕЛКОВОМ ОРУЖИИ | 2013 |
|
RU2536570C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| Способ выявления и компенсации ошибки прицеливания ствольного оружия | 2022 |
|
RU2787320C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ | 2005 |
|
RU2294511C1 |


Изобретение относится к области измерительной техники и используется для измерения рассогласования оси ствола и оси прицела. Автоматизированная телевизионно-оптическая система для измерения взаимного расположения осей канала ствола и прицела содержит ЭВМ с монитором, блок питания и управления с контроллером (БПУ), головку измерительную (ГИ), при этом ГИ содержит поворотное устройство (ПУ), выполненное с возможностью поджатия корпуса к внутренней поверхности канала ствола, электронно-оптический блок (ЭОБ), первую телекамеру, расположенную в электронно-оптическом блоке (ЭОБ), и дополнительно содержит еще один ЭОБ, в котором находится вторая телекамера, распложенная на окуляре прицела. При этом ПУ выполнен с возможностью поворота на 360° и фиксации через каждые 45° с помощью электро- и гидроприводов. Технический результат: увеличение точности измерений и автоматизация процесса. 9 ил.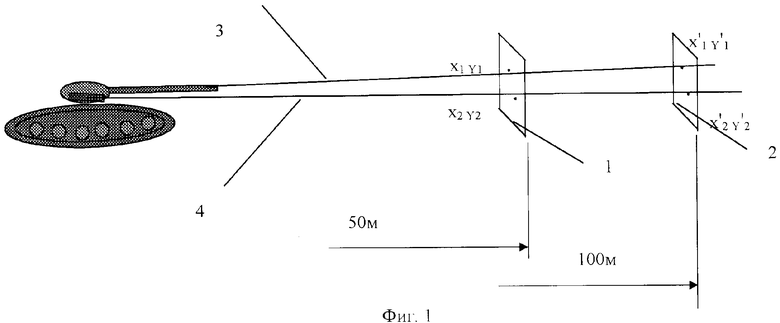
Автоматизированная телевизионно-оптическая система для измерения взаимного расположения осей канала ствола и прицела, содержащая ЭВМ с монитором, блок питания и управления с контроллером (БПУ), головку измерительную (ГИ), при этом ГИ содержит поворотное устройство (ПУ), выполненное с возможностью поджатия корпуса к внутренней поверхности канала ствола, электронно-оптический блок (ЭОБ), первую телекамеру, расположенную в электронно-оптическом блоке (ЭОБ), и отличающийся тем, что дополнительно содержит еще один ЭОБ, в котором находится вторая телекамера, распложенный на окуляре прицела; ГИ содержит фиксирующее устройство (ФУ), кроме того ПУ выполнен с возможностью поворота на 360° и фиксации через каждые 45° с помощью электро- и гидроприводов, корпус ПУ выполнен в виде цилиндра, на торцах которого закреплены два фланца с отверстиями по центру и снабженные тремя опорами, две опоры каждого фланца жестко фиксированы, а одна опора каждого фланца выполнена на упругом элементе, ЭОБ, расположенный в ГИ, установлен на две призмы в корпусе ПУ, при этом по команде ЭВМ через контроллер БПУ осуществляется включение электропривода и гидропривода, которые заставляют опоры на упругом элементе выдвигаться и давить на внутреннюю поверхность канала ствола таким образом, что корпус ГИ прижимается жесткими опорами к противоположной поверхности канала ствола и фиксируется.
| СПОСОБ КОНТРОЛЯ И УСТАНОВКИ ОСИ ДЛИННОМЕРНОГО ИЗДЕЛИЯ ОТНОСИТЕЛЬНО БАЗОВОЙ ОСИ И ПРИБОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2143097C1 |
| Тракт воздушного охлаждения лопатки соплового аппарата турбины высокого давления газотурбинного двигателя (варианты) | 2018 |
|
RU2686430C1 |
| US 3634940 A, 18.01.1970 | |||
| US 5813131 A, 29.09.1998 | |||
| US 4103428 A, 01.08.1978. | |||

