Изобретение относится к области дистанционного управления машинами и, в частности, летательными аппаратами и предназначено для формирования оптического поля для телеориентирования управляемых объектов.
В настоящее время известен способ (патент RU №2100745, МПК6 F41G 7/26) формирования оптического поля для телеориентирования управляемых объектов. При этом оптическое поле формируется путем излучения оптического потока и заполнения им зоны в окрестностях оптической оси визира сканированием плоскими лучами, причем лучи отклоняют со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира.
Известен также оптический прицел системы наведения управляемого снаряда (патент RU №2150073, МПК7 F41G 7/26), содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, системы вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов, при этом шторка выполнена в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму выходам формирователя импульсов, первый и второй выходы которого подключены соответственно к входам первого и второго лазеров, а схемы задержки имеют возможность регулировки времени задержки в диапазоне от 0 до Тα/π, где Т - период вращения призмы; α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора.
Известен также формирователь импульсов (патент RU №2150073, МПК7 F41G 7/26), содержащий опорный генератор, схему "ИСКЛЮЧАЮЩЕЕ ИЛИ", счетчик времени, постоянное запоминающее устройство (ПЗУ), преобразователь код - время и коммутатор каналов, первый и второй входы схемы "ИСКЛЮЧАЮЩЕЕ ИЛИ", а также первый и второй выходы ПЗУ подключены соответственно к первым и вторым входам формирователя импульсов, выход системы "ИСКЛЮЧАЮЩЕЕ ИЛИ" подключен к первым входам коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен к входу преобразователя код - время, первый и второй выходы коммутатора каналов подключены соответственно к первому и второму выходам формирователя импульсов, при этом вторые выходы счетчика времени и преобразователя код - время подключены к выходу опорного генератора.
В такой системе промах объекта (отклонение объекта от линии визирования) в основном определяется угловым рассогласованием оптической оси визира и информационной осью луча наведения (точностью совмещения оптической оси визира и направления, соответствующего нулевым значениям координат). Для конструктивного обеспечения соосности визирного и информационного каналов во всех условиях эксплуатации (климатических, механических и др.) требуется увеличение габаритов, массы, подбор однородных материалов, длительные циклы термостабилизации конструкции и т.п. В современных системах телеориентирования, где дальности управления достигают 10000 м и более, необходимо, чтобы угловое рассогласование информационного и визирного каналов лежало в пределах 10 угл. сек.
Кроме того, операции взаимной юстировки каналов осложняются тем, что излучение инжекционных лазеров лежит в ближней ИК-области и невидимо для глаза оператора.
А существенным недостатком формирователя импульсов является невозможность управления выходными импульсами в зависимости от текущего времени формирования и внешнего сигнала управления.
Задачей данного изобретения является повышение точности наведения управляемого объекта.
Поставленная задача решается в способе формирования оптического поля телеориентирования управляемых объектов, преимущественно управляемых летательных аппаратов, включающем излучение оптического потока и заполнения им зоны в окрестностях оптической оси визира путем ее сканирования плоскими лучами, причем лучи отклоняют со взаимным сдвигом во времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от центра зоны сканирования, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с центром зоны сканирования, но до начала телеориентирования управляемого объекта излучение оптического прожектора заводят в визирный канал, причем излучение производят только в те моменты времени, когда значения интервалов времени между посылками равны опорным значениям, соответствующим нулевым значениям координат, а излучение, прошедшее через визирный канал в виде двух плоских лучей, совпадающих с координатными осями, визуализируют одновременно с прицельной маркой визира, и в случае несовпадения точки пересечения визуализированных плоских лучей с прицельной маркой визира производят отклонение оптического потока прожектора или положения визирной марки в двух взаимно перпендикулярных направлениях до совпадения точки пересечения визуализированных плоских лучей с прицельной маркой визира.
Введение в способ формирования оптического поля новых операций - завода излучения прожектора в визирный канал, производства излучения только в моменты, когда интервалы времени между посылками равны опорным значениям, визуализация излучения, прошедшего через визирный канал, отклонение оптического потока прожектора в двух взаимно перпендикулярных направлениях - обеспечивают соосность оптической оси визира и информационной оси прожектора, т.е. новые признаки способа находятся в причинно-следственной связи с достигаемым техническим результатом.
При этом данный способ может быть реализован в оптическом прицеле системы наведения управляемого снаряда, содержащем оптически сопряженные визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов, при этом шторка выполнена в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно к входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму выходам формирователя импульсов, первый и второй выходы которого подключены соответственно к входам первого и второго лазеров, а схемы задержки имеют возможность регулировки времени задержки в диапазоне от 0 до Тα/π, где Т - период вращения призмы; α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора, новым является то, что визирный канал выполнен в виде последовательно соединенных телевизионной камеры, блока формирования электронной прицельной марки и монитора, а также пульта управления положением прицельной марки, первый выход которого подключен ко второму входу блока формирования электронной прицельной марки, а второй выход которого подключен к третьему входу формирователя импульсов прожектора, при этом в него введена поворотная призма, жестко закрепленная на флажке со смещением относительно оси панкратического объектива прожектора так, что при одном из крайних положений поворота флажка входная грань поворотной призмы оптически сопряжена с панкратическим объективом прожектора, а выходная грань поворотной призмы оптически сопряжена с телевизионной камерой визирного канала.
При этом в формирователь импульсов, содержащий последовательно соединенные опорный генератор, счетчик времени, ПЗУ, преобразователь код - время, коммутатор каналов, а также схему "ИСКЛЮЧАЮЩЕЕ ИЛИ", первый и второй входы которой, а также второй и третий входы ПЗУ подключены соответственно к первому и второму входам формирователя импульсов, выход схемы "ИСКЛЮЧАЮЩЕЕ ИЛИ" подключен ко вторым входам счетчика времени и коммутатора каналов, а второй вход преобразователя код - время подключен к выходу опорного генератора, дополнительно введены дешифратор, схема "ИЛИ" и две схемы "И", выход счетчика времени подключен ко входу дешифратора, выход которого подключен к первому входу схемы "ИЛИ", второй вход которой подключен к третьему входу формирователя импульсов, первый и второй выходы которого соединены с выходами первой и второй схемы "И" соответственно, первые входы первой и второй схем "И" подключены соответственно к первому и второму выходам коммутатора каналов, а вторые входы подключены к выходу схемы "ИЛИ".
Введение в устройство прицела нового элемента - поворотной призмы, а также выполнение визирного канала на основе телевизионной камеры, монитора, блока формирования прицельной марки и пульта управления положением прицельной марки и также введение новых элементов в формирователь импульсов, а также их связей обеспечивает реализацию новых операций способа.
На фиг.1 представлена структурная схема прицела.
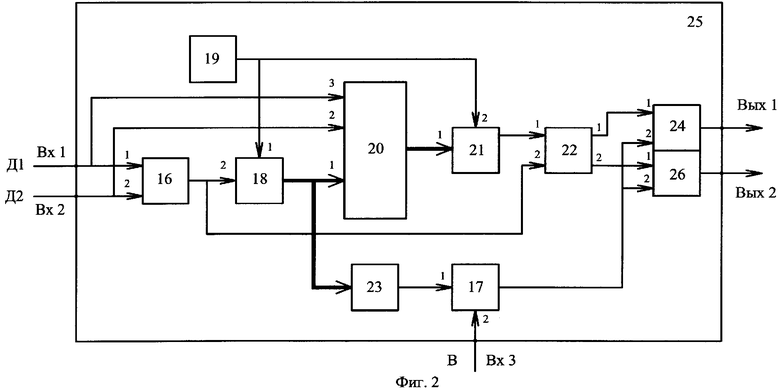
На фиг.2 представлена структурная схема формирователя импульсов.
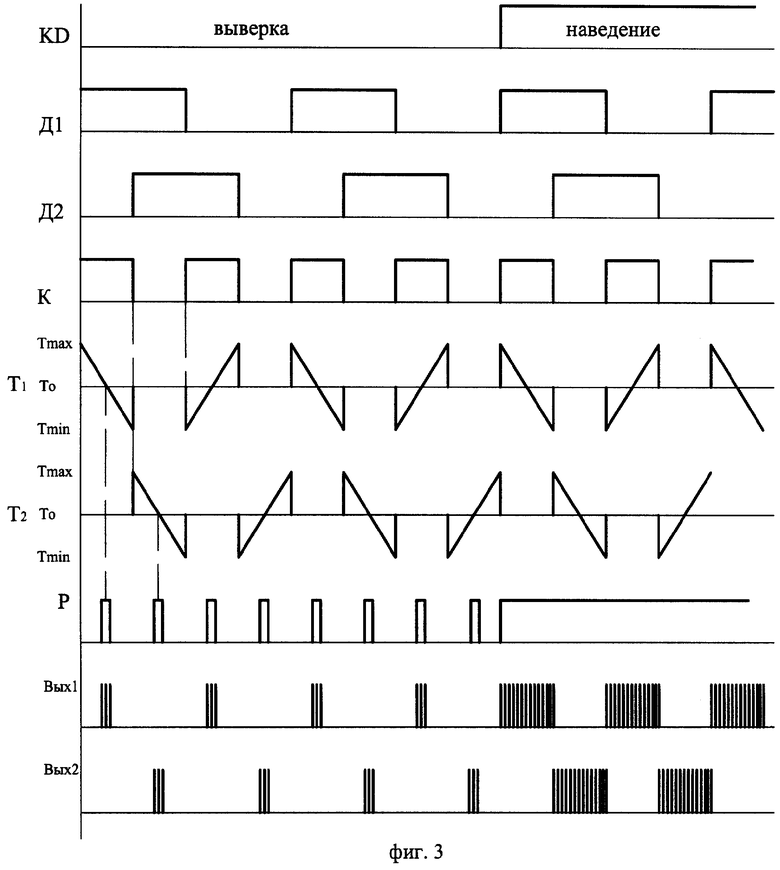
На фиг.3 представлены эпюры сигналов, формируемых в процессе выверки каналов.
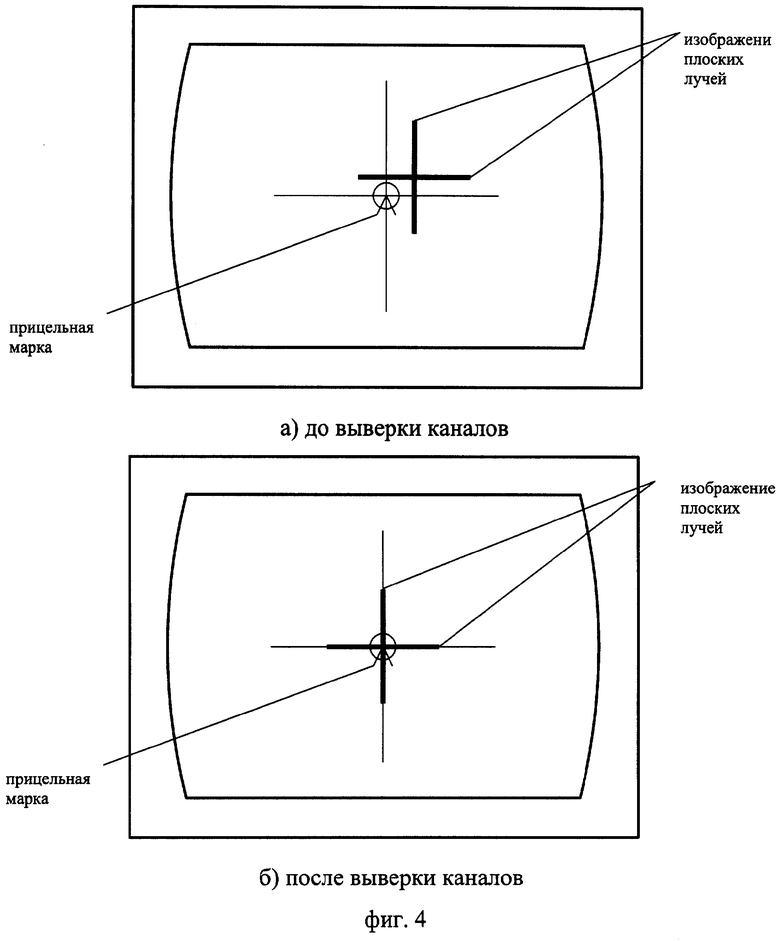
На фиг.4 представлено изображение на мониторе в процессе выверки каналов.
Примером реализации данного устройства служит оптический прицел (фиг.1), содержащий прожектор 1, визирный канал 2 и поворотную призму 3. Прожектор 1 содержит два инжекционных лазера 4 и 5, систему вывода излучения на единую поляризационную ось, выполненную, например в виде поляризационного кубика 6, сканер 7, содержащий призму 8, непрозрачный полудиск 9 и два оптронных датчика 10 и 11, выходы которых подключены к схемам задержки 12 и 13, подключенным к формирователю импульсов 14. На выходе прожектора установлен панкратический объектив 15. При этом формирователь импульсов 14 (см. фиг.2) прожектора содержит схемы "ИСКЛЮЧАЮЩЕЕ ИЛИ" 16 и схему "ИЛИ" 17, счетчик времени 18, опорный генератор 19, постоянное запоминающее устройство 20, преобразователь код - время 21, коммутатор каналов 22, дешифратор 23 и две схемы "И" 24 и 25. При этом все узлы, входящие в состав прожектора, могут быть выполнены, как в прототипе, а вся логика может быть реализована на ПЛИС, например, ЕРМ7128 или на процессоре AT89S52.
Визирный канал 2 содержит телевизионную камеру 26, например WAT902H, включающую в себя приемный объектив 27 и ПЗС-матрицу 28, блок формирователя прицельной марки 29, выполненный, например, на ПЛИС ЕРМ7128, специализированных микросхемах обработки видеосигнала и ФЛЭШ-памяти 24С16, пульт управления положением прицельной марки 30, выполненный, например, на стандартных переключателях, и монитор 31.
Оптический прицел системы наведения управляемого снаряда работает следующим образом. Перед началом наведения оператор устанавливает призму 3 в положение 3а и с пульта управления положением прицельной марки подает сигнал В (см. фиг.3), который поступает на третий вход формирователя импульсов 14 и соответственно на схему "ИЛИ" 17. Непрозрачный полудиск 9 сканера 7 вращается и попеременно перекрывает оптронные датчики 10 и 11, сигналы которых обрабатываются в схемах задержки 12 и 13, на чьих выходах формируются сигналы Д1 и Д2 (см. фиг.3), поступающие на входы 1 и 2 формирователя импульсов 14. В нем сигналы Д1 и Д2 поступают на адресные входы ПЗУ 20 и входы схемы "ИСКЛЮЧАЮЩЕЕ ИЛИ" 16, на выходе которой формируется сигнал К, состояние "1" которого соответствует работе одного из каналов (например, каналу вертикальной координаты), а состояние "0" - другого (например, каналу горизонтальной координаты). От момента смены уровня сигнала К счетчик времени 18 синхронно с частотой опорного генератора 19 формирует на своем выходе код, пропорциональный текущему времени, который подается на соответствующие адресные входы ПЗУ 20. В зависимости от состояния адресных входов ПЗУ 20 формирует на своем выходе код, в соответствии с которым преобразователь код - время 21 формирует парные импульсы, временной интервал между импульсами в паре при этом соответствует установленной комбинации сигналов Д1 и Д2, а период повторения посылок Т1 и Т2 линейно меняется во времени, начиная с момента возникновения соответствующей комбинации. Сформированные парные импульсы подаются на коммутатор каналов 22, который в зависимости от состояния сигнала К подает их на входы схемы "И" 24 или схемы "И" 25, при этом изменения периода посылок будут соответствовать функциям Т1 и Т2 (см. фиг.3). Одновременно с этим код с выхода счетчика времени 18 подается на вход дешифратора 23, который формирует импульсы разрешения излучения Р (см. фиг.3) в моменты времени, когда период повторения парных импульсов совпадает с опорным значением Т0, соответствующим нулевым координатам. Схема "ИЛИ" 17 при наличии сигнала с выхода пульта управления положением прицельной марки 30 пропускает эти импульсы на вторые входы схем "И" 24 и 25, которые при этом пропускают импульсы Т1 и Т2 с выходов коммутатора каналов 22 только в момент времени, когда их период совпадает с опорным значением Т0. Эти импульсы поступают на входы лазеров 4 и 5, плоские лучи которых выводятся на оптическую ось прожектора поляризационным кубиком 6, вращающаяся призма 8 производит нутационное сканирование этими лучами. Одновременно с этим оптические компоненты панкратического объектива 15 устанавливаются в положение, соответствующее максимальной дальности управления. Оптический поток, сформированный панкратическим объективом 15, отразившись от граней поворотной призмы 3, поступает на входной объектив 27 визира 2, который фокусирует данное излучение в плоскость ПЗС-матрицы 28. Видеосигнал с выхода телевизионной камеры 26 поступает на вход блока формирования прицельной марки 29, где происходит подмешивание в видеосигнал сигнала, формирующего прицельную марку по сигналам строчных и кадровых синхроимпульсов, присутствующих во входном видеосигнале. Таким образом сформированный видеосигнал поступает на монитор 31 (фиг.4). На экране данного монитора 31 при этом формируется изображение прицельной марки, определяющей оптическую ось визира 2, а также изображение двух плоских лучей, так как лазеры 15 и 16 производят излучение только при прохождении ими направления, совпадающего с информационным центром поля управления, совпадающим с нулевыми координатами. Пример такого изображения представлен на фиг.4а. Оператор наблюдает изображение на мониторе 31 и в случае, если точка пересечения двух плоских лучей не совпадает с прицельной маркой сетки с помощью пульта управления положением прицельной марки 30 производит выверку прожектора с визирным каналом 2, т.е. совмещение изображений прицельной марки и точки пересечения визуализированных плоских лучей. При этом происходит смещение формируемой прицельной марки относительно положения сигналов синхросмеси в видеосигнале и запоминание этого положения во встроенной памяти блока формирования прицельной марки. После окончания выверки изображение на мониторе 31 должно соответствовать фиг.4б.
После этого оператор переводит призму 3 в боевое (рабочее) положение (б). Панкратический объектив устанавливается в начальное положение. При этом с выхода пульта управления положением прицельной марки 30 приходит сигнал КД=1 (фиг.3), и импульсы Т1 и Т2 (фиг.3) проходят на выходы схемы формирователя импульсов, игнорируя сигнал Р, т.е. идет боевой режим формирования луча наведения. Оператор наблюдает за фоноцелевой обстановкой через монитор 31 и угловыми подвижками всего прибора совмещает прицельную марку с целью, при этом проведенная операция выверки обеспечивает гарантированное совмещение информационной оси луча наведения с точкой прицеливания, т.е. обеспечивается высокая точность попадания.
В данном прицеле исключается влияние механических и климатических воздействий на соосность информационного и визирного каналов, а также влияние фактора старения конструкции, т.е. во всех условиях эксплуатации обеспечивается высокая точность наведения управляемого объекта на цель, таким образом, достигается цель предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
Изобретение относится к области дистанционного управления машинами и, в частности, летательными аппаратами и предназначено для формирования оптического поля для телеориентирования управляемых объектов. Технический результат - повышение точности наведения управляемого объекта. Существо изобретения заключается в заводе излучения прожектора в визирный канал, формировании излучения только в моменты, когда интервалы времени между посылками равны опорным значениям, визуализации излучения, прошедшего через визирный канал. Кроме того, осуществляют отклонение оптического потока прожектора в двух взаимно перпендикулярных направлениях, чем обеспечивают соосность оптической оси визира и информационной оси прожектора. В оптический прицел наведения управляемым снарядом введена поворотная призма, а визирный канал выполнен на основе телевизионной камеры, монитора, блока формирования прицельной марки и пульта управления положением прицельной марки. В формирователь импульсов введены две схемы «И» и последовательно соединенные дешифратор и схема «ИЛИ» с соответствующими связями. 3 н.п. ф-лы, 4 ил.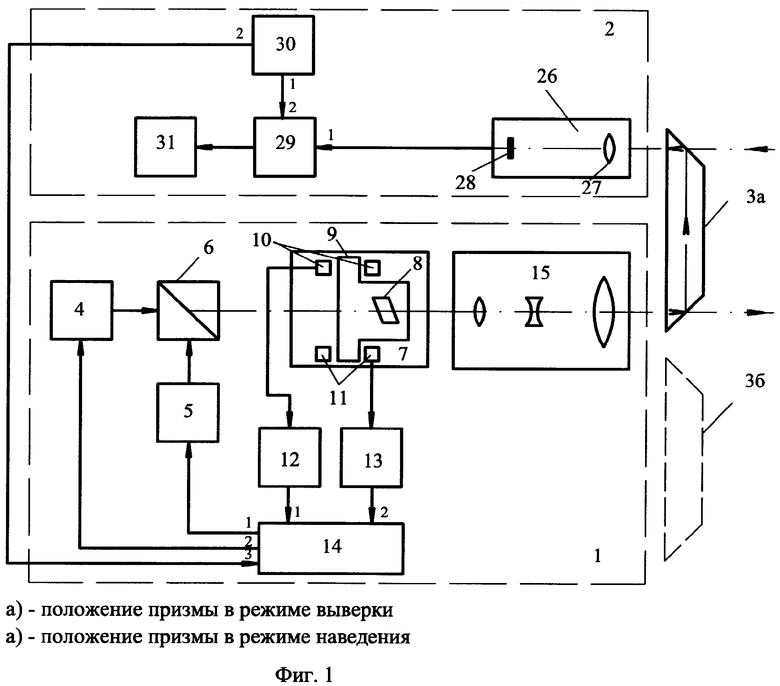
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| DE 4137843 A1, 19.05.1993 | |||
| US 5350134 А, 27.09.1994 | |||
| US 4111385 А, 05.09.1978 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕНИЯ ОРТОГОНАЛЬНЫХ СКАНИРУЮЩИХ ЛУЧЕЙ В СИСТЕМАХ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2109246C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| Станция орбитальная заправочная криогенная | 2019 |
|
RU2729748C1 |

