Изобретение относится к оптической локации и может использоваться для обнаружения и получения координатной информации зондируемых объектов, например, диффузно-отражающих или оптических приборов с бликующей апертурой.
Известно обзорное лазерное устройство наблюдения и обнаружения, содержащее лазер с оптической цилиндрической системой, формирующей в вертикальной плоскости вытянутую диаграмму (ΘY≫ΘX), приемный объектив с интерференционным фильтром, фотоприемник в виде линейки фотодиодов, усилительный канал, формирователь видеосигналов и блок обработки.
Данное устройство определяет угловые координаты, но не имеет возможности измерять расстояние до объектов и селектировать различные типы объектов, а именно диффузные или оптические.
Известен также ряд приборов дальномерного типа с ручным сканированием, позволяющих с высокой точностью измерять расстояние до объектов и их угловые координаты, например дальномеры типа LEICA. Недостатком таких дальномеров является малая частота циклов, т.е. значительное время измерения (Тизл≥0,1 с), что не позволяет использовать их в качестве обзорных приборов (ΔΘобз≥30÷40 град/сек). Однако эти устройства не позволяют селектировать оптические приборы, например, фотографические, приборы наблюдения и т.п.
Известно обзорное устройство, описанное в патенте RU 2129287, позволяющее обнаруживать как оптические, так и диффузно-отражающие объекты. Устройство содержит объектив, электронно-оптический преобразователь (ЭОП), фотоприемник с объективом, визирное видеоконтрольное устройство, блок обработки сигналов, блок затворных импульсов, импульсные источники напряжения, синхронизатор, частотно-импульсный лазер с объективом, модулятор тока накачки частотно-импульсного лазера, делитель кадровой частоты, схему автоматической регулировки усиления и пульт управления. При сканировании заданного пространства лазерными импульсами в мгновенном поле зрения (ΔΘX×ΔΘY) получают от объекта отраженный сигнал, бликовый или диффузно-отраженный. Оператор наблюдает в визирное устройство и производит селекцию оптических объектов бликового типа и объектов с диффузным отражением. Для снижения воздействия фонового излучения производится последовательное временное стробирование по дальности с дискретом ΔS, при этом информация по дальности не выводится. Для снижения влияния динамического диапазона входных сигналов и фона в приемном канале применена электронная АРУ.
К недостаткам устройства можно отнести отсутствие возможности автоматизации селекции объекта, отсутствие возможности измерения текущей координатной информации по углам ΔΘX и ΔΘY и по дальности до объектов. Кроме того, в связи с наличием в устройстве ЭОПа используется режим накопления сигналов, что приводит к накоплению фоновых шумов и, соответственно, к снижению потенциала системы, снижению помехозащищенности, к необходимости использования повышенной частоты Fсл≥5 кГц и повышенной средней мощности лазерных импульсов, т.е. повышению потребляемой мощности, что увеличивает опасность для людей в ближней зоне обзорного пространства.
Технической задачей данного изобретения является сокращение времени измерения расстояния и угловых координат объекта, повышение помехоустойчивости в условиях эксплуатации и повышение безопасности работы с устройством.
Поставленная задача достигается тем, что в оптико-электронное локационное устройство, содержащее фотоприемник с размещенным перед ним приемным объективом, первый импульсный полупроводниковый лазер, перед которым установлен первый передающий объектив, первый управляемый модулятор, выход которого соединен с управляющим входом первого полупроводникового лазера, а вход - с первым выходом синхронизатора, схему автоматической регулировки усиления (АРУ), пульт управления и визирный канал, согласно изобретению введены второй импульсный полупроводниковый лазер, перед которым установлен второй передающий объектив, второй управляемый модулятор, включенный между вторым выходом синхронизатора и управляющим входом второго импульсного полупроводникового лазера, последовательно соединенные усилитель фототока, вход которого подключен к выходу фотоприемника, выполненного на базе лавинного фотодиода (ЛФД), управляемый частотный корректор, адаптивный пороговый обнаружитель и селектор сигналов, светодиод подсветки, сопряженный своей диаграммой с чувствительной площадкой ЛФД, инвертирующий усилитель, выход которого подключен к входу светодиода подсветки, а вход - к второму выходу схемы АРУ, измеритель временного сдвига, входы которого соединены с выходом адаптивного порогового обнаружителя и третьим выходом синхронизатора, первый и второй генераторы низкой частоты, входы которых соединены соответственно с выходами селектора сигналов, а выходы - с соответствующими входами введенного сумматора, индикатор обнаружения и положения объекта, включенный на выходе сумматора, формирователь сигнала адаптации, первый и второй выходы которого соединены соответственно с пороговым входом адаптивного порогового обнаружителя и управляющим входом частотного корректора, формирователь информационного сигнала, включенный между выходом измерителя временных сдвигов и входом введенного индикатора информационных сигналов, между выходом усилителя фототока и входом схемы АРУ включен введенный пороговый усилитель шумов, второй вход которого соединен с первым выходом пульта управления, формирователь управляющего напряжения, вход которого соединен с выходом схемы АРУ, первый выход - с пороговым входом адаптивного порогового обнаружителя, а второй выход - с входом питания фотоприемника через введенный регулируемый источник питания, выход измерителя временных сдвигов подключен к входу индикатора информационных сигналов через введенный формирователь информационных сигналов, при этом второй, третий и четвертый выходы пульта управления соединены соответственно с управляющими входами формирователя сигналов адаптации, первого управляемого модулятора и второго управляемого модулятора, первый и второй выходы синхронизатора подсоединены соответственно к первому и второму синхронизирующим входам селектора импульсов, а четвертый выход синхронизатора соединен с синхронизирующим входом формирователя сигналов адаптации.
В устройство также дополнительно введена щелевая диафрагма, сопряженная по углам через приемный объектив с диаграммами излучения первого и второго передающих объективов и размещенная в фокальной плоскости приемного объектива перед чувствительной площадкой фотоприемника, при этом размеры А и В щелевой диафрагмы выбраны из условия: В≤А, где А - соответствует размеру чувствительной площадки ЛФД, чувствительная площадка ЛФД отнесена вдоль оптической оси от фокуса объектива на расстояние 
где D - размер чувствительной площадки ЛФД, Fпр - фокусное расстояние приемного объектива, Dвх - диаметр входного зрачка приемного объектива.
Устройство также может быть дополнительно снабжено светодиодом подсветки фотоприемника и инвертирующим усилителем, включенным между вторым выходом схемы АРУ и светодиодом подсветки фотоприемника.
При этом оптическая система второго передающего объектива может быть выполнена в виде усеченных в плоскости Y сферических линз с размерами L×M, где L=2tgΘлаз X·F2; M=2tgΘлаз Y·F2, F2 - фокусное расстояние второго передающего объектива; Θлаз Х и Θлаз Y - соответственно углы расходимости излучения в плоскости Х ширины и в плоскости Y длины излучающего р-n перехода второго импульсного полупроводникового лазера.
Кроме того, устройство может быть снабжено датчиком угловой скорости поворота и углового положения устройства, первый и второй выходы которого соединены соответственно с вторым входом формирователя информационных сигналов и управляющим входом синхронизатора, который выполнен перестраиваемым по частоте выходных импульсов.
Введение дополнительного передающего полупроводникового лазера с установленным перед ним передающим объективом и дополнительных блоков для обеспечения обработки сигналов позволяет осуществлять оперативное селектирование объектов, измерение расстояния до объекта и его угловых координат. Наличие в устройстве щелевой диафрагмы позволяет увеличить поле захвата фотоприемника. Введение светодиода подсветки обеспечивает работу устройства при различных уровнях внешнего светового фона. Заявленная форма выполнения оптической системы дополнительного передающего объектива позволяет уменьшить массогабариты устройства. Наличие датчика угловой скорости снижает лазерную опасность при работе персонала.
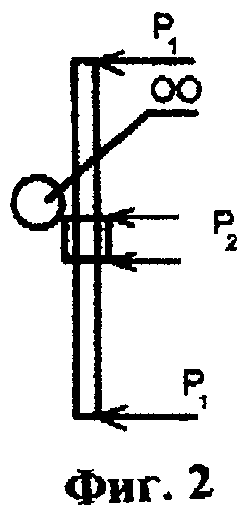
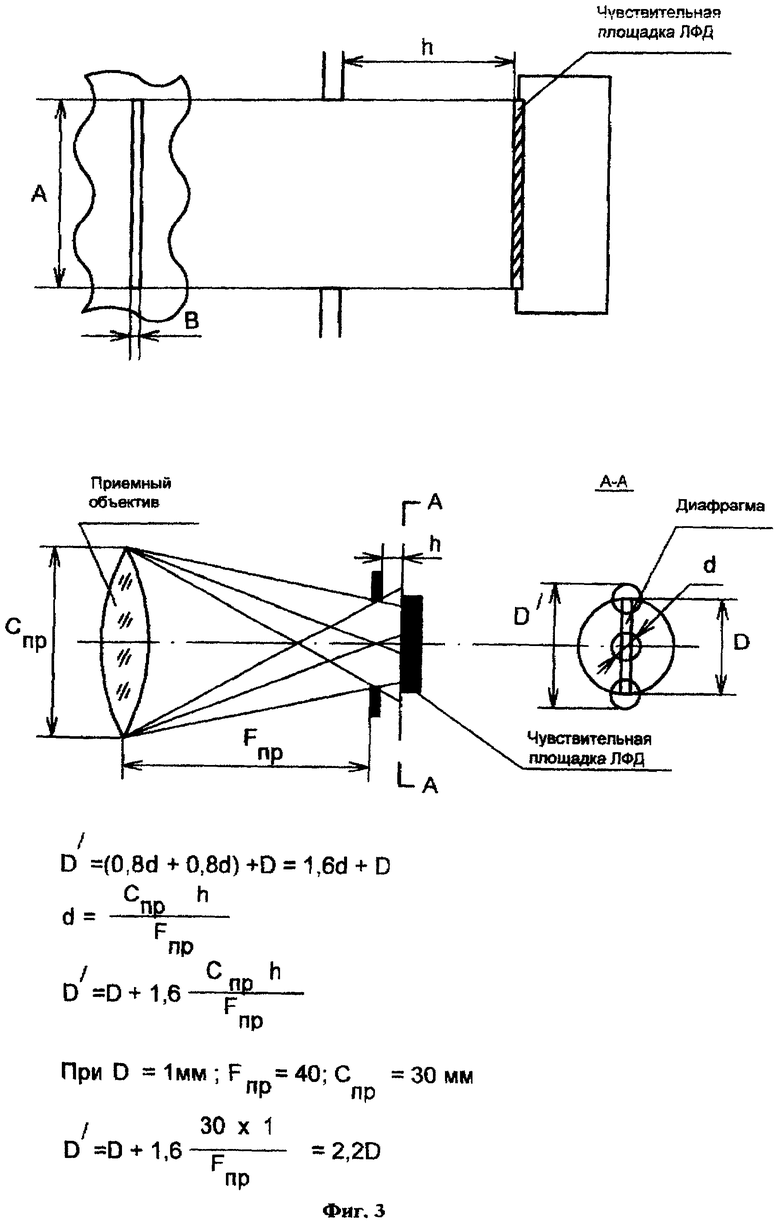
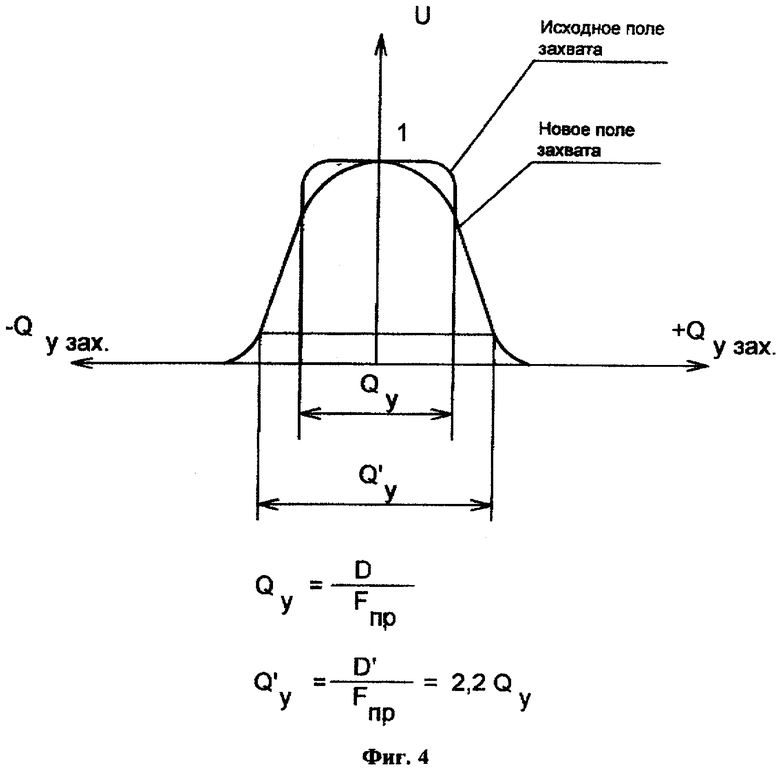
На фиг.1 приведена структурная электрическая схема оптико-электронного локационного устройства; на фиг.2 - диаграммы излучения передающих объективов; на фиг.3 - размещение чувствительной площадки ЛФД и щелевой диафрагмы; на фиг.4 - поле «захвата» фотоприемника.
Оптико-электронное локационное устройство содержит первый передающий объектив 1, второй передающий объектив 2, приемный объектив 3, светодиод подсветки фотоприемника 4, инвертирующий усилитель 5, визирный канал 6, щелевую диафрагму 7, первый импульсный полупроводниковый лазер (ИПЛ) 10, съюстированный с первым передающим объективом 1, фотоприемник 9, выполненный на базе фотодетектора с внутренним усилением, например, лавинного фотодиода (ЛФД), второй импульсный полупроводниковый лазер (ИПЛ) 8, регулируемый источник питания 11, усилитель фототока 12, регулируемый пороговый усилитель шумов (РПУШ) 13, пульт управления (ПУ) 14, первый управляемый модулятор (УМ) 15, второй управляемый модулятор (УМ) 16, датчик 17 угловой скорости поворота и углового положения устройства, управляемый частотный корректор (УЧК) 18, схему АРУ 19, синхронизатор 20, выполненный перестраиваемым по частоте выходных импульсов, адаптивный пороговый обнаружитель (АЛО) 21, формирователь управляющего напряжения (ФУН) 22, формирователь сигнала адаптации 23, измеритель временного сдвига 24, формирователь информационных сигналов 25, селектор сигналов 26, первый генератор низкой частоты Fн1 (ГНЧ) 27, индикатор информационных сигналов 28, индикатор обнаружения и положения 29, сумматор 30, второй генератор низкой частоты Fн1 (ГНЧ) 31.
Щелевая диафрагма с размерами: А - длина и В - ширина, причем В≤А и А равна диаметру чувствительной площадки ЛФД, расположена в фокальной плоскости приемного объектива 3 перед чувствительной площадкой фотоприемника 9 и сопряжена по углам через приемный объектив с диаграммами излучения передающих объективов 1 и 2 ИПЛ 8 и 10. Чувствительная площадка ЛФД отнесена вдоль оптической оси от фокуса объектива на расстояние 
где D - размер чувствительной площадки ЛФД, Fпр - фокусное расстояние приемного объектива 3, Dвх - диаметр входного зрачка приемного объектива. Световод подсветки 4 сопряжен своей диаграммой с чувствительной площадкой ЛФД. Оптическая система второго передающего объектива 2 выполнена в виде усеченных по краям в вертикальной плоскости сферических линз с размерами L×M, шириной и высотой, соответственно, где L=2tgΘлаз X·F2; M=2tgΘлаз Y·F2; F2 - фокусное расстояние второго передающего объектива.
Например, для полупроводникового лазера типовые Θлаз Х=(12÷15)° - угол расходимости в плоскости ширины (X) излучающего р-n перехода; Θлаз Y(5÷6)° - угол расходимости в плоскости длины (Y) излучающего р-n перехода.
Второй ИПЛ 8 установлен в фокусе объектива 2 с вертикальным расположением излучающего р-n перехода, а его диаграмма излучения через объектив 2 сопряжена с центральным участком диаграммы первого ИПЛ 10. Синхронизатор 20, который может быть выполнен, например, в виде управляемого по входу генератора импульсов с регулируемой частотой или управляемого цифрового синтезатора импульсов или управляемого одновибратора, вырабатывает управляемые по частоте импульсы, поступающие соответственно на управляющие входы управляемых модуляторов 15, 16. Частоты FU1=FU2 - являются функцией от угловой скорости ωх поворота устройства во всем диапазоне управления, при этом сигналы FU1 и FU2 формируются с фазовым сдвигом. Первый и второй УМ 15 и 16 выполнены управляемыми по мощности накачки ИПЛ 8 и 10, для чего их управляющие входы подключены к третьему и четвертому выходам пульта управления. Схема АРУ 19 может быть выполнена, например, в виде детектора и интегратора. Регулируемый пороговый усилитель шумов (РПУШ) 13 может быть реализован, например, в виде операционного усилителя с регулируемыми порогом и коэффициентом усиления, либо компаратора с регулируемым порогом. ФУН 22 может быть выполнен, например, в виде усилителя постоянного тока, регулируемого транзистора и т.п. Формирователь сигнала адаптации 23 может быть генератором с внешним запуском, формирующим пороговый сигнал для обнаружителя с амплитудой, зависящей от расстояния, который обеспечивает выделение оптических объектов на фоне диффузно-отражающих.
Формирователь информационных сигналов 25 может состоять, например, из ЦАП и дешифратора. Управляемый частотный корректор может представлять собой RC-фильтр с регулируемым сопротивлением с помощью полевого транзистора.
Устройство работает следующим образом.
Сканирование и обзор пространства может осуществляться как вручную оператором, так и с помощью вращения опорно-поворотной платформы (на чертеже не показана). Сканирование заданного сектора пространства осуществляется в двух плоскостях - по углу места ΘY и азимуту ΘX. При этом ножевидной диаграммой излучения, расположенной вертикально, происходит захват, например, оптического объекта. Облучение осуществляется с частотой импульсов Fизл=f(ω), зависящей от угловой скорости сканирования (угловой скорости поворота устройства) в горизонтальной плоскости. Наблюдение и обзор пространства оператор производит через визирный канал 6, съюстированный с приемным и передающим объективами.
Угловые размеры диаграмм первого и второго передающих объективов выбираются, исходя из тактико-технических требований к устройству. Например, в нашем случае выбираем диаграмму облучения в вертикальной плоскости Y: Θоб1 Y=(1÷2)° для первого передающего объектива и Θоб2 Y=(0,1÷0,2)° для второго передающего объектива, т.е.  .
.
Широкой диаграммой первого передающего объектива 1 при сканировании по азимуту ΘX происходит захват объекта, затем, сканируя по углу места ΘY, объект переводят в зону диаграммы второго передающего объектива 2. При этом на индикаторе обнаружения и положения 29 появляется информация сначала о захвате объекта (сигнал с частотой Fн1), а затем сигнал позиционирования объекта (сигнал с частотой Fн1+Fн2). Информация может выдаваться, например, либо визуально, либо звуком.
Лазерные импульсы первого и второго ИПЛ 8 и 10 сдвинуты по фазе, например, на те, что позволяет селектировать их во времени селектором сигналов 26.
Частота лазерных импульсов Fu1=Fu1=f(ω), т.е. зависит от угловой скорости сканирования по азимуту, и определяется для исключения пропуска объекта как:
 , где Θоб/сек - максимальный угол обзора за сек; ΔΘоб1 X - мгновенное разрешение по азимуту; ΔΘоб1 X - угловая ширина диаграммы первого передающего объектива, которая может составлять (0,1÷0,05)°, тогда, например, для скорости 45°/сек мы имеем максимальную частоту
, где Θоб/сек - максимальный угол обзора за сек; ΔΘоб1 X - мгновенное разрешение по азимуту; ΔΘоб1 X - угловая ширина диаграммы первого передающего объектива, которая может составлять (0,1÷0,05)°, тогда, например, для скорости 45°/сек мы имеем максимальную частоту  . При этом на объект попадает N=1÷2 импульса, которые имеют среднюю мощность Рср, равную
. При этом на объект попадает N=1÷2 импульса, которые имеют среднюю мощность Рср, равную

Тогда, например, при Ри=50 Вт, длительности импульса Ти=0,1 мкс и N=2 имеем Рср≤10-5 Вт=10 мкВт, что значительно меньше допустимых норм лазерной опасности для людей даже в случае полного попадания излучения. На контрольном расстоянии, примерно равном 10 м, эта мощность упадет не менее чем на два порядка. Основная лазерная опасность возникает при фиксированном положении устройства. В этом случае не требуется большая частота облучения, ее можно снизить до значений Fлаз min=10 Гц. Тогда имеем среднюю мощность  что так же ниже нормы лазерной опасности (на контрольном расстоянии 10 м ослабление - на два порядка).
что так же ниже нормы лазерной опасности (на контрольном расстоянии 10 м ослабление - на два порядка).
Регулировка частоты лазерных импульсов достигается с помощью обратной связи, заводимой с датчика 17 угловой скорости поворота и углового положения устройства, на управляющий вход синхронизатора 20, который по сигналу с датчика 17 формирует требуемую частоту Fлаз=f(ω) в пределах Fлаз max=1 кГц до Fлаз min=10 Гц, Fлаз=К·ω+Fлаз min, где К - коэффициент преобразования, при этом сохраняется фазовый сдвиг между Uлаз 1 и Uлаз 2 - импульсными сигналами, подаваемыми на управляемые модуляторы 15, 16, соответственно.
Отраженные от объекта лазерные импульсы принимаются приемным объективом 3. Для снижения фоновых засветок и световых помех устройство снабжено согласованной щелевой диафрагмой 7 с размерами А×В (длиной и шириной, соответственно), причем, В«А, где  , D - размер чувствительной площадки ЛФД фотоприемника 9, Fпр - фокусное расстояние приемного объектива 3, ΘY пр - поле зрения приемного объектива Θпр Y=©лаз Y,
, D - размер чувствительной площадки ЛФД фотоприемника 9, Fпр - фокусное расстояние приемного объектива 3, ΘY пр - поле зрения приемного объектива Θпр Y=©лаз Y,  . С учетом аберраций оптической системы передатчики обеспечивают
. С учетом аберраций оптической системы передатчики обеспечивают 
Исходя из технологических возможностей союстировки каналов, выбираем  и соответственно
и соответственно  .
.
Например, для фотоприемника с размером D=1 мм, А=1 мм, В=0,1 мм. В этом случае значение фона и помех снизится примерно в 7 раз, что повысит соотношение сигнал/шум на выходе фотоприемника 9 в  раз. Для расширения поля захвата объекта в плоскости ΘY применено смещение чувствительной площадки фотоприемника 9 относительно диафрагмы на h. Как правило, необходимо повышенное поле захвата на малых и средних дистанциях (до 500 м), так как линейные размеры объектов, на которых располагаются оптические объекты, имеют конечные размеры, уменьшающиеся в угловых величинах с увеличением расстояния. В данном устройстве диафрагма 7 располагается в фокальной плоскости приемного объектива 3, чувствительная площадка фотоприемника 9 отнесена на небольшое расстояние h. При этом на чувствительной площадке формируется кружок рассеяния диаметром d. Значение d выбираем примерно равным
раз. Для расширения поля захвата объекта в плоскости ΘY применено смещение чувствительной площадки фотоприемника 9 относительно диафрагмы на h. Как правило, необходимо повышенное поле захвата на малых и средних дистанциях (до 500 м), так как линейные размеры объектов, на которых располагаются оптические объекты, имеют конечные размеры, уменьшающиеся в угловых величинах с увеличением расстояния. В данном устройстве диафрагма 7 располагается в фокальной плоскости приемного объектива 3, чувствительная площадка фотоприемника 9 отнесена на небольшое расстояние h. При этом на чувствительной площадке формируется кружок рассеяния диаметром d. Значение d выбираем примерно равным  , тогда поле захвата, определяемое как
, тогда поле захвата, определяемое как  увеличивается примерно в 1,8 раза.
увеличивается примерно в 1,8 раза.
Далее оптический сигнал фотодетектируется с помощью фотоприемника 9 с внутренним усилением, например, лавинного фотодиода, усиливается усилителем фототока 12, затем подается на управляемый частотный корректор 18, который формирует амплитудно-частотную характеристику, зависящую от расстояния, то есть полоса пропускания фотоприемного канала ΔF равна 
где S - текущее расстояние до объекта; с - фазовая скорость света в среде. Это позволяет иметь хорошее временное разрешение при широкой полосе пропускания на малых и средних расстояниях и, соответственно, высокую точность измерения расстояния, а также обеспечивает повышение чувствительности и дальности вследствие улучшения отношения сигнал/шум из-за снижения полосы пропускания с некоторым допустимым снижением точности измерения на больших расстояниях. В совокупности повышается дальность действия устройства.
С выхода управляемого частотного корректора 18 сигнал поступает на адаптивный пороговый обнаружитель 21, где происходит пороговая обработка и выделение полезного информационного сигнала на фоне помех и шумов. На его опорный вход с выхода формирователя сигнала адаптации 23: подаются: сигнал адаптации  сигнал временного стробирования и сигнал плавающего порога - Uпор=Uпо+Iлфд·f(Pфон; Т°), где U0 - минимальный порог обнаружения сигнала; U1 - максимальный порог обнаружения сигнала; Uпо - заданный начальный порог обнаружения; Si - текущее расстояние до объекта; Iлфд - ток на выходе фотолриемника 9, Рфон - текущий уровень фона и помех, Т° - текущая температура.
сигнал временного стробирования и сигнал плавающего порога - Uпор=Uпо+Iлфд·f(Pфон; Т°), где U0 - минимальный порог обнаружения сигнала; U1 - максимальный порог обнаружения сигнала; Uпо - заданный начальный порог обнаружения; Si - текущее расстояние до объекта; Iлфд - ток на выходе фотолриемника 9, Рфон - текущий уровень фона и помех, Т° - текущая температура.
Сигнал Uадап формируется по сигналу с регулируемого синхронизатора 20 и команде с ПУ 14, выполненного в виде контактных кнопок, тумблеров или сенсорных выключателей. Эти сигналы обеспечивают оптимальное обнаружение информационного сигнала с адаптацией к уровню фона, температуре, текущему расстоянию. В цепи порогового усилителя шумов 13 усиливаются шумовые импульсы, затем в схеме АРУ 19 - детектируются и интегрируются в требуемой полосе, из этого сигнала создаются управляющие напряжения в ФУН 22. С первого выхода ФУН 22 сигнал Unop подается на АЛО 21, со второго выхода ФУН 22 подается сигнал Uпор на регулируемый источник напряжения 11, от которого запитывается ЛФД фотоприемника 9. При этом коэффициент усиления ЛФД зависит от напряжения питания:
где Uсм - текущее значение напряжения питания; Uлав0=f(Pфон; Т°) - рабочее напряжение лавинного пробоя лавинного фотодиода фотоприемника 9; n - коэффициент избыточных шумов (≈1,5÷2).
Напряжение лавинного пробоя Uлав меняется от температуры окружающей среды, это изменение составляет от 1 до 4 В/град и достигает для высоковольтных Si ЛФД 100÷200° при ΔТ=(-30÷50)°С.
В то же время оптимальный коэффициент усиления Мопт ЛФД зависит не только от Т°С, но и от внешних фоновых условий: 
где Iфо=f(T°C; Рфон)=(Iто±ΔIто·ΔТ°С)+Iфон, где k - постоянная Больцмана; ΔF - полоса пропускания фотоприемного канала; Iто - темновой ток ЛФД при M=1; Rн - сопротивление нагрузки ЛФД; Т° - температура; Iфо - ток ЛФД; Iфон - фототек от фона. Поэтому необходимо учитывать при выставлении режима Мопт не только температуру, но и изменения фототока от Т°С. Это достигается поддержанием эквивалентных шумов на выходе усилителя в заданных пределах (±20÷30%), определяемых порогом усиления усилителя шумов 13. Усиленные шумы детектируются и интегрируются в АРУ 19, после чего данный сигнал управления регулирует напряжение питания ЛФД в ту или иную сторону для компенсации изменения уровня шумов относительно порога.
Таким образом, происходит регулировка коэффициента усиления фотоприемника 9 по критерию поддержания постоянного уровня шумов и помех и снижение динамического диапазона изменения Uпор за счет регулировки напряжения питания и соответственно усиления и шумов лавинного фотодиода. Этим исключается перегрузка фотоприемника 9 по фону (солнечный день, блики и т.п.) и обеспечивается функционирование устройства при больших перепадах фона и температур.
Одновременно со второго выхода схемы АРУ 19 сигнал Uфон, пропорциональный уровню фона Uфон=f(Рфон) поступает на инвертирующий усилитель 5, выходной ток которого формирует с помощью светодиода 4 опорный сигнал подсвета фотоприемника 9 Рпод. Этот сигнал подсвета принципиально необходим в условиях эксплуатации при низких температурах, Т°≤(-5÷-30)° и малых внешних фонах - сумерки, ночь. В этих условиях темновой ток Iт современных высокочувствительных Si ЛФД с М становится очень малым: очень малым Iт≤10-9 А и начинает проявляться Пуассоневское распределение шумов, количество шумовых импульсов резко уменьшается и схема регулирования выводит лавинный фотодиод фотоприемника 9 в режим лавинного пробоя, при этом появляются хаотические шумовые выбросы, приводящие к ложным срабатываниям и перенасыщению входных цепей - фотоприемник 9 + усилитель фототока 12. Введение небольшой подсветки исключает это явление. В то же время при повышении уровня внешнего фона в условиях яркого солнца, ламп, и т.п. с помощью обратной связи с АРУ подсветка уменьшается.
Чувствительность приемного канала изменяется переключением порога порогового усилителя шумов 13 в зависимости от условий местности, в которой используется данное устройство. Оператор с пульта управления 14 задает режим «Максимальная дальность» или «Номинальная дальность».
Для измерения расстояния до малоразмерных диффузно-отражающих объектов и оптических объектов используется второй ИПЛ 8 с управляемым модулятором накачки 16 и длиннофокусным объективом 2 (F2≫F1). С целью снижения весогабаритных характеристик производится согласование поперечных размеров второго передающего объектива 2 с диаграммой излучения второго ИПЛ 8 по двум плоскостям в углах 2ΘX лаз и 2ΘY лаз. Типовые параметры полупроводниковых лазеров 2ΘX лаз≈25°; 2ΘХ лаз≈10°. Так как ΘХ лаз=0,4 ΘХ лаз, то и размеры передающего объектива 2 в плоскости "Y" меньше в 2,5 раза, чем в плоскости "X". При этом снижение весогабаритных характеристик оптической системы не наносит ущерба потенциалу устройства. Первый и второй УМ 15, 16 первого и второго ИПЛ 10, 8 формируют импульсы тока накачки, зависящие от режима работы: «Максимальная дальность» и «Номинальная дальность», задаваемого ПУ 14. Выделенный в АПО 21 сигнал поступает на первый вход измерителя временного сдвига 24, где производится измерение и оцифровка временного интервала между стартовыми импульсами, поступающими с третьего выхода регулируемого синхронизатора 20, и выделенными сигналами. Оцифрованный сигнал поступает на формирователь информационных сигналов 25, где дешифруется и преобразуется в требуемый вид информации, например, в визуальную, звуковую, речевую. Одновременно на формирователь информационных сигналов 25 поступают сигналы, цифровые или аналоговые, об угловых координатах: по углу ΘY и по азимуту ΘX. Эти сигналы так же преобразуются в требуемый вид информации. Информация по углам и расстоянию выводится с помощью индикатора информационных сигналов 28 в виде, например, визуального табло или звукового динамика - наушника.
Информация по дальности выдается по каждому принятому сигналу в реальном масштабе времени. Время измерения и выдача информации по дальности составляет не более 1÷10 мсек, для сравнения, в прототипе при последовательной ручной установке временного строба время измерения - более 1÷5 сек.
Второй канал обработки формирует информацию об обнаружении оптических объектов. Режим обнаружения оптических объектов «Обн.ОО» задается в пульте управления 14. В этом случае включается второй ИПЛ 8 путем подачи управляющего сигнала на второй управляемый модулятор 16, он же переводится в режим минимального тока накачки управлением своего модулятора. С ПУ 14 подается команда на формирователь сигнала адаптации 23 для корректировки сигнала адаптации. В этом случае обеспечиваются требуемые условия выделения сигнала от оптического объекта на фоне диффузно-отраженных сигналов, так как уровень бликующего отраженного сигнала значительно больше из-за более узкой диаграммы обратного рассеяния 
Реально на практике бликующий сигнал от оптического объекта примерно в 50-200 раз больше, чем сигнал от диффузно-отражающих поверхностей на малых и средних расстояниях S=(50÷300) м.
Для выделения сигналов первого и второго ИПЛ 10, 8 сигналы с выхода адаптивного порогового обнаружителя 21 подаются на селектор сигналов 26, с выходов которого первый сигнал подается на первый генератор низкой частоты 27, а второй - на второй генератор низкой частоты 31, затем эти частоты суммируются в сумматоре 30 и подаются на индикатор обнаружения и положения 29, который выдает информацию либо в звуковом (тон), либо в световом (мигание светодиода) виде.
В случае обнаружения оптического объекта первым ИПЛ 10 индикатор 29 выдает тоновый сигнал с частотой Fн2 (например, звук 500 Гц); при переходе оптического объекта в центральную зону диаграммы - в зону второго ИПЛ 10 появляется сигнал с частотой Fн2 (например, Fн2=1 кГц), который смешивается с сигналом с частотой Fн1, и результирующая дает биения с частотой FΣ=Fн1+Fн2. Это является критерием позиционирования оптического объекта в центр визирного канала 6, т.е. когда визирный канал своим перекрестием - сеткой съюстирован с диаграммой излучения устройства. Одновременно выдается информация о дальности, углах места и азимуту в первом информационном канале.
В случае необходимости измерения расстояния до диффузно-отражающих объектов с ПУ 14 подается команда «дальномер», которая выключает первый УМ 15 и переводит второй УМ 16 в режим максимального тока накачки второго ИПЛ 8. Так же корректируется (уменьшается) уровень сигнала адаптации в формирователе сигнала адаптации 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА НА МАЛЫХ ДИСТАНЦИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549210C2 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2006 |
|
RU2324145C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2349929C2 |
Изобретение относится к оптической локации и может использоваться для обнаружения и получения координатной информации зондируемых объектов. Устройство содержит фотоприемник с размещенным перед ним приемным объективом, первый и второй импульсные полупроводниковые лазеры (ППЛ), перед которыми установлены соответственно первый и второй передающие объективы, два управляемых модулятора ППЛ, синхронизатор, схему автоматической регулировки усиления, пульт управления и визирный канал, усилитель фототока фотоприемника, управляемый частотный корректор, адаптивный пороговый обнаружитель и селектор сигналов, инвертирующий усилитель, измеритель временного сдвига, первый и второй генераторы низкой частоты, индикатор обнаружения и положения объекта, формирователь сигнала адаптации, формирователь информационного сигнала, пороговый усилитель шумов, формирователь управляющего напряжения. Устройство снабжено щелевой диафрагмой, сопряженной по углам через приемный объектив с диаграммами излучения первого и второго передающих объективов и размещенной в фокальной плоскости приемного объектива перед чувствительной площадкой фотоприемника. Устройство дополнительно содержит светодиод подсветки фотоприемника и датчик угловой скорости поворота и углового положения устройства. Технический результат - сокращение времени измерения расстояния и угловых координат объекта, повышение помехоустойчивости в условиях эксплуатации и повышение безопасности работы с устройством. 4 з.п. ф-лы, 4 ил.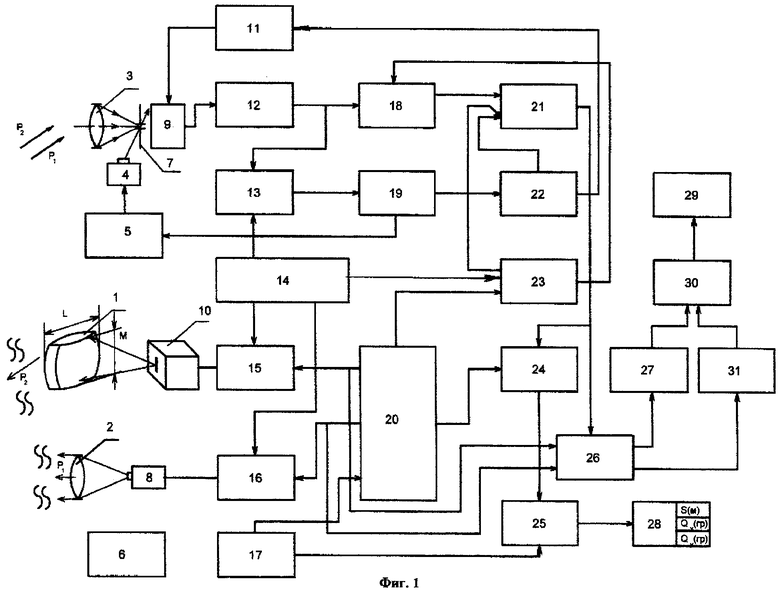
 где D - размер чувствительной площадки фотоприемника, Fпр - фокусное расстояние приемного объектива, Dвх - диаметр входного зрачка приемного объектива.
где D - размер чувствительной площадки фотоприемника, Fпр - фокусное расстояние приемного объектива, Dвх - диаметр входного зрачка приемного объектива.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| JP 2002062109, 28.02.2002 | |||
| US 3802780 A, 09.04.1974. | |||

