Изобретение относится к системам мониторинга, сопровождения и управления наземными транспортными средствами (ТС). Изобретение может быть использовано для централизованного контроля за состоянием и местоположением обслуживаемых ТС, дистанционного управления их узлами и агрегатами, а также для поиска ТС и оказания помощи водителю и пассажирам в нештатных ситуациях, например в случаях кражи или угона ТС.
Известен способ мониторинга и контроля за ТС, осуществляющими транспортировку грузов, основанный на определении заданных координат ТС, при котором каждому контролируемому ТС задают номер и маршрут следования, принимают на ТС сигналы глобальной спутниковой системы навигации (GPS) и рассчитывают на основе принятых навигационных сигналов текущие координаты ТС. Информацию о текущих координатах каждого контролируемого ТС преобразуют в электрический сигнал для передачи по сотовой сети подвижной связи, например по GSM-сети, передают этот сигнал дискретно в реальном масштабе времени по сотовой сети подвижной связи в диспетчерский центр, где информацию принимают, проводят ее обработку, хранение и отображение. При возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты контролируемого ТС, при получении сигнального сообщения от водителя ТС отображают также смысловое содержание и время передачи сигнального сообщения, а также заданный номер данного ТС. На основе анализа полученной информации принимают решение об оперативной помощи водителю (RU №2157565, G08G 1/123).
Недостатком указанного технического решения является потеря информации о местонахождении контролируемого ТС при его попадании в зоны отсутствия радиовидимости, что приводит к искажению данных, задержкам и ошибкам в принятии решений. Из-за этого снижаются надежность и оперативность управления ТС.
Надежность и оперативность принятия решений по контролю и управлению ТС из диспетчерского центра повышаются при использовании другого известного способа сопровождения и управления ТС, при котором на контролируемом ТС принимают сигналы навигационных спутников GPS, определяют текущие координаты, время и скорость движения этого ТС, формируют пакет информации с включением в него дополнительного кода номера ТС и состояния отдельных подсистем ТС, преобразуют указанный пакет информации в сигнал для передачи в реальном масштабе времени по GSM-сети в диспетчерский центр, периодически передают указанную информацию с одного или нескольких контролируемых ТС, принимают эту информацию в диспетчерском центре, производят ее обработку, хранение и отображение на электронной карте местности, а при возникновении нештатной ситуации передают соответствующее сообщение в виде пакета информации на соответствующее контролируемое ТС через GSM-сеть, при приеме пакета информации на ТС включают/отключают отдельные подсистемы или устанавливают двухстороннюю речевую связь по GSM-сети, при этом определяют моменты перехода ТС из зоны/в зону радиовидимости GSM-сети и в промежуток времени между моментом выхода ТС из зоны радиовидимости и возвратом в зону радиовидимости на ТС запоминают и накапливают соответствующие пакеты информации, а при входе в зону радиовидимости накопленные пакеты информации передают в диспетчерский центр, где их обрабатывают и принимают решения по управлению ТС. Определение же момента перехода ТС из зоны/в зону радиовидимости GSM-сети осуществляют путем сравнения уровня аналогового сигнала, преобразованного в цифровую форму, с заданным уровнем и при превышении первого над вторым фиксируют момент входа в зону радиовидимости, а при превышении второго над первым - момент выхода из зоны радиовидимости (RU №2217797, G08G 1/123).
Указанный способ обеспечивает более надежное и устойчивое сопровождение ТС, чем вышеупомянутый аналог. Однако оба они имеют принципиальный недостаток, обусловленный жесткой привязкой к сотовой GSM-сети и к сигналам навигационных спутников GPS. Как известно, GSM-сети уязвимы по отношению к преднамеренным помехам. Системы, использующие сигналы GPS, также могут быть локально нейтрализованы с помощью помехи даже микроваттной мощности. К тому же они плохо работают на узких городских улицах, в туннелях, в лесистой местности, то есть, в условиях радиозатенения.
На устранение указанных недостатков направлено техническое решение по патенту RU №2288509, G08В 25/10, G08G 1/13, при котором на борту каждого контролируемого ТС принимают сигналы глобальной спутниковой системы радионавигации, например сигналы GPS, по содержащимся в них данным рассчитывают текущие навигационные параметры - координаты и скорость движения ТС, посредством бортовых датчиков ТС определяют состояние его узлов и агрегатов и изменения этого состояния, а при заданных изменениях состояния формируют соответствующие извещения, путем дополнения извещений полями служебной информации преобразуют извещения в сообщения, в поля служебной информации которых записывают коды идентификационных признаков, текущих навигационных параметров и параметров, характеризующих состояния узлов и агрегатов ТС, переносят указанные сообщения на высокочастотные несущие и передают сигналы, несущие указанные сообщения, по радиоэфиру в диспетчерский центр, используя для этого бортовой терминал сотовой сети подвижной связи, например GSM-сети, и/или бортовой терминал специализированной ретрансляционно-радиопеленгационной сети, в диспетчерском центре принимают указанные сигналы, декодируют их, осуществляют цифровую обработку информации с определением координат и построением траекторий движения ТС, отображают указанные траектории на фоне фрагментов электронной карты-схемы местности в сопровождении текстовой информации, анализируют полученные траектории и принимают решения, на основе которых формируют для контролируемых ТС командные сообщения, содержащие коды соответствующих команд, например код команды блокирования движения ТС, передают указанные командные сообщения по сотовой сети подвижной связи и/или по специализированной ретрансляционно-радиопеленгационной сети на борт контролируемого ТС, принимают указанные командные сообщения на борту контролируемого ТС, декодируют их, после чего воздействуют на соответствующие исполнительные органы, например на иммобилайзер, командами, коды которых содержатся в принятых командных сообщениях, - при этом с помощью базовых станций ретрансляционно-радиопеленгационной сети осуществляют радиослежение за излучением установленных на контролируемых ТС бортовых терминалов специализированной ретрансляционно-радиопеленгационной сети, для чего измеряют энергетические, частотные и временные параметры излучения с борта каждого контролируемого ТС, передают значения указанных параметров в диспетчерский центр, где определяют пеленг на источник излучения с данной базовой станции ретрансляционно-радиопеленгационной сети и используют полученные значения пеленгов с нескольких базовых станций ретрансляционно-радиопеленгационной сети для расчета текущего местоположения контролируемого ТС, осуществляют логическую обработку принятых сигналов, а результаты этой обработки используют при формировании передаваемых на борт соответствующих ТС команд по коммутации бортового терминала сотовой сети подвижной связи и/или бортового терминала специализированной ретрансляционно-радиопеленгационной сети, а также по регулированию параметров излучения бортового терминала специализированной ретрансляционно-радиопеленгационной сети, преобразуют эти команды в коды управления бортовым терминалом сотовой сети подвижной связи и/или бортовым терминалом специализированной ретрансляционно-радиопеленгационной сети и записывают эти коды управления в командные сообщения, транслируемые по сотовой сети подвижной связи и/или по специализированной ретрансляционно-радиопеленгационной сети на борт ТС, а после приема на борту ТС указанных командных сообщений и декодирования содержащихся в них кодов управления воздействуют кодами управления на бортовой терминал сотовой сети подвижной связи и/или на бортовой терминал специализированной ретрансляционно-радиопеленгационной сети, вызывая включение/выключение бортового терминала сотовой сети подвижной связи и/или бортового терминала специализированной ретрансляционно-радиопеленгационной сети, или увеличение/уменьшение мощности и продолжительности сеансов излучения бортового терминала специализированной ретрансляционно-радиопеленгационной сети.
Большинство описанных выше операций реализовано в системе ЛОДЖЕК-Горизонт, являющейся ближайшим аналогом настоящего изобретения (www.lojack.ru).
Поиск и перехват угнанных транспортных средств (УТС) в системе ЛОДЖЕК-Горизонт осуществляются с помощью пеленгации радиосигнала, излучаемого установленным на УТС радиомаяком.
Радиомаяк активируется после сообщения владельца УТС в диспетчерский центр системы. Пеленгация осуществляется посредством трекеров, установленных на борту ТС реагирования, роль которых выполняют машины собственной службы розыска системы ЛОДЖЕК-Горизонт и патрульные машины милиции.
Система ЛОДЖЕК-Горизонт является комбинированной системой, объединяющей в себе возможности спутниковых систем позиционирования и (к указанному классу систем относятся, например, системы Цезарь Сателлит, Кобраконнекс, Старком) и вариантов системы ЛОДЖЕК, использующих собственные базовые станции.
ТС, оснащенные системой ЛОДЖЕК-Горизонт, имеет два независимых канала передачи информации: канала, работающего на частотах GSM с возможностью роуминга и канала, работающего на собственной частоте.
Диспетчерский центр ЛОДЖЕК-Горизонт позволяет определять местоположение любого контролируемого ТС с отображением его на карте-схеме местности и осуществляя сопровождение этого ТС.
Основным недостатком ближайшего аналога, как и любых других систем, реализующих описанный выше способ, является сложность их практической реализации, что связано с необходимостью развертывания и поддержания в работоспособном состоянии специальной дорогостоящей инфраструктуры, делающей указанные системы весьма затратными. Попытки же отказаться от собственных каналов связи, воспользовавшись сотовыми сетями подвижной связи, не эффективны из-за возможности блокировать действие любого сотового телефона на небольшом радиусе действия.
Настоящее изобретение направлено на устранение указанного недостатка.
Предметом настоящего изобретения является система охраны и поиска УТС, содержащая связанные друг с другом посредством сотовой сети подвижной связи, например GSM-сети, возимые абонентские комплексы, комплексы реагирования и диспетчерский центр, при этом возимые абонентские комплексы установлены на обслуживаемых ТС, выполнены с возможностью реализации охранно-противоугонных функций, осуществления спутникового позиционирования обслуживаемого ТС, например с помощью GPS, и оборудованы источниками дополнительного излучения сигналов на частотах, отличных от частот, используемых в сотовой сети подвижной связи, комплексы реагирования установлены на ТС реагирования и/или находятся у пеших нарядов реагирования и выполнены с возможностью активации и пеленгации указанных источников дополнительного излучения сигналов, расположенных в возимых абонентских комплексах, а диспетчерский центр выполнен с возможностями приема, обработки и отображения информации от возимых абонентских комплексов и от комплексов реагирования, включая определение местонахождения возимых абонентских комплексов и комплексов реагирования, а также с возможностью передачи им командных сообщений с использованием сотовой сети подвижной связи, - при этом в систему введены стационарные абонентские комплексы, выполненные с возможностью приема от возимых абонентских комплексов сигналов по резервным помехозащищенным каналам, ретрансляции этих сигналов по сотовой сети подвижной связи в диспетчерский центр, приема от диспетчерского центра по сотовой сети подвижной связи командных сообщений, в том числе команд блокирования движения ТС и команд тревожной сигнализации, и ретрансляции указанных командных сообщений в возимые абонентские комплексы по резервным помехозащищенным каналам, а возимые абонентские комплексы выполнены, соответственно, с возможностью передачи сигналов на стационарные абонентские комплексы по резервным помехозащищенным каналам связи.
Частными существенными признаками изобретения являются следующие.
Каждый возимый абонентский комплекс содержит блок спутникового позиционирования, например GPS-приемник, возимый контроллер, а также охранно-противоугонную подсистему, связанную своими первыми входом и выходом с возимым контроллером и выполненную с возможностью подключения своими вторыми входом и выходом к системе зажигания ТС, возимый терминал сотовой подвижной связи, возимый резервный приемопередатчик, входящий в состав резервного помехозащищенного канала связи со стационарным абонентским комплексом, и блок коммутации, при этом источник дополнительного излучения выполнен в виде автономного радиомаяка, блок коммутации связан первыми входом и выходом с возимым контроллером, вторыми входом и выходом - с возимым терминалом сотовой подвижной связи, третьими входом и выходом - с возимым резервным приемопередатчиком и четвертыми входом и выходом - с блоком спутникового позиционирования.
Охранно-противоугонная подсистема содержит центральный блок управления, первые вход и выход которого являются первыми входом и выходом охранно-противоугонной подсистемы, а вторые вход и выход - вторыми входом и выходом охранно-противоугонной подсистемы, датчики состояния, органы тревожной сигнализации и исполнительные органы, выполненные с возможностью блокирования движения обслуживаемого ТС, при этом информационные входы центрального блока управления подключены к выходам датчиков состояния, а выходы тревожной сигнализации и управляющие выходы, соответственно, - к органам тревожной сигнализации и к исполнительным органам.
Стационарный абонентский комплекс содержит последовательно связанные друг с другом стационарный резервный приемопередатчик, входящий в состав резервного помехозащищенного канала связи с возимым абонентским комплексом, стационарный контроллер и стационарный терминал сотовой подвижной связи, а также блок тревожной сигнализации, вход которого подключен к третьему выходу стационарного контроллера.
Стационарный абонентский комплекс содержит блок спутникового позиционирования и последовательно связанные друг с другом стационарный резервный приемопередатчик, входящий в состав резервного помехозащищенного канала связи с возимым абонентским комплексом, стационарный контроллер и стационарный терминал сотовой подвижной связи, а также блок тревожной сигнализации, вход которого подключен к третьему выходу стационарного контроллера, третий вход и четвертый выход которого соединены с блоком спутникового позиционирования.
Диспетчерский центр содержит последовательно соединенные центральный терминал сотовой подвижной связи, блок цифровой обработки информации и автоматизированное рабочее место, выход которого подключен ко входу центрального терминала сотовой подвижной связи.
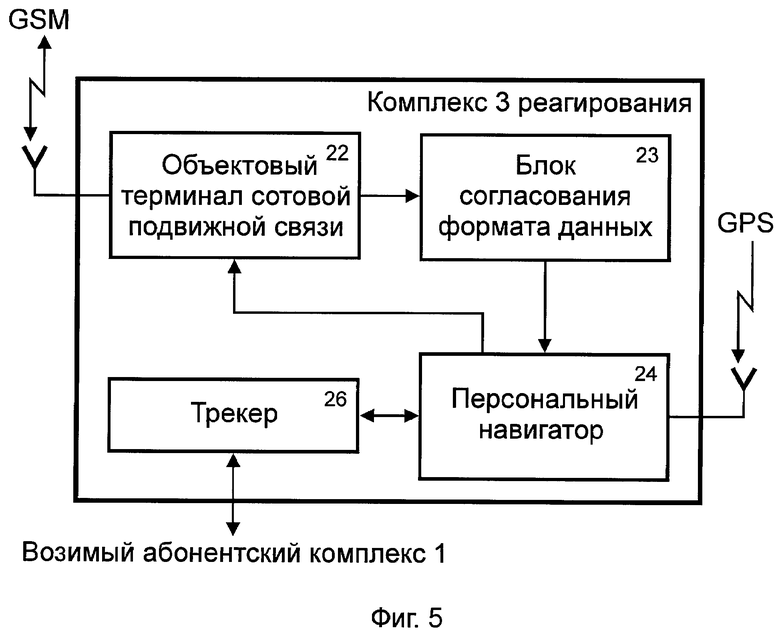
Каждый комплекс реагирования содержит последовательно соединенные объектовый терминал сотовой подвижной связи, блок согласования формата данных и персональный навигатор, выход которого подключен ко входу объектового терминала сотовой подвижной связи, а также трекер, выполненный с возможностью активации источника дополнительного излучения, входящего в состав соответствующего возимого абонентского комплекса, пеленгации его излучения и измерения дальности до него.
Задачей настоящего изобретения является создание системы, более простой в практической реализации, чем ближайший аналог, при сохранении основного преимущества последнего - возможности поиска, сопровождения и перехвата УТС в условиях применения злоумышленниками преднамеренных помех, способных нейтрализовать сотовые системы подвижной связи и системы спутникового позиционирования.
Обеспечиваемый технический результат заключается в применении, наряду с сотовой сетью подвижной связи, помехозащищенного резервного радиоканала, не требующего, в отличие от вышеупомянутых аналогов, развертывания на местности сети стационарных базовых станций.
Сущность изобретения поясняется на фиг.1 - фиг.5.
Фиг.1 иллюстрирует общие принципы построения рассматриваемой системы.
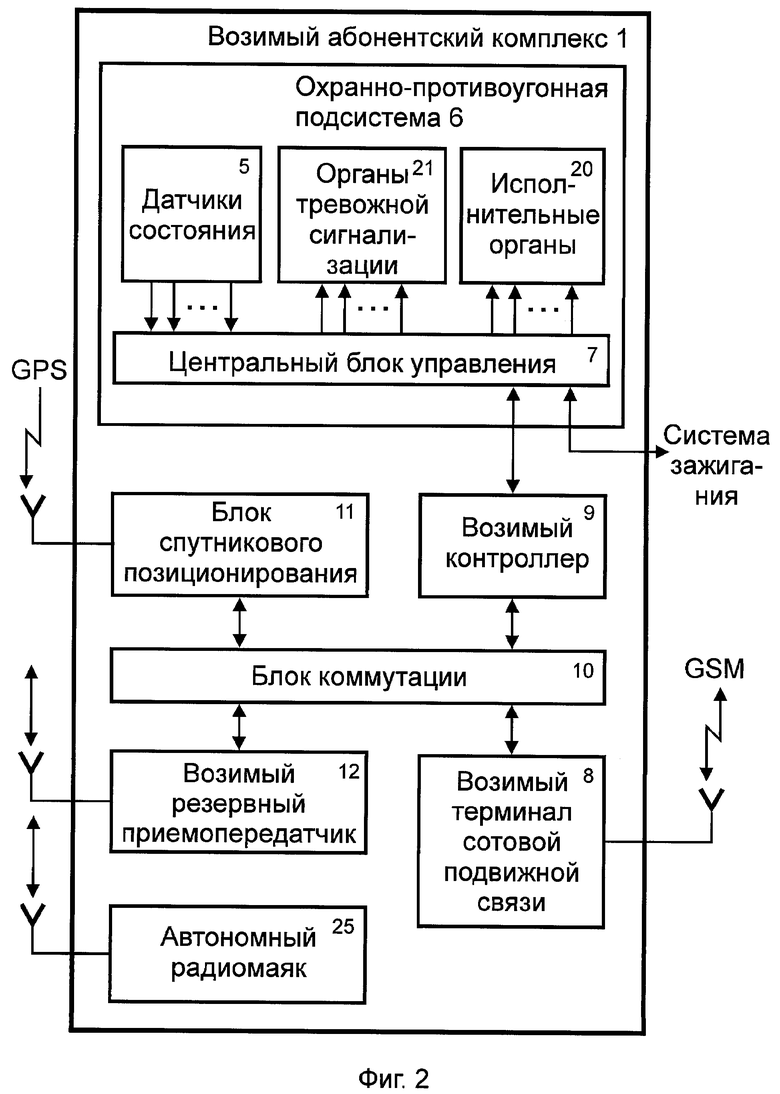
На фиг.2 представлена структурная схема построения возимого абонентского комплекса.
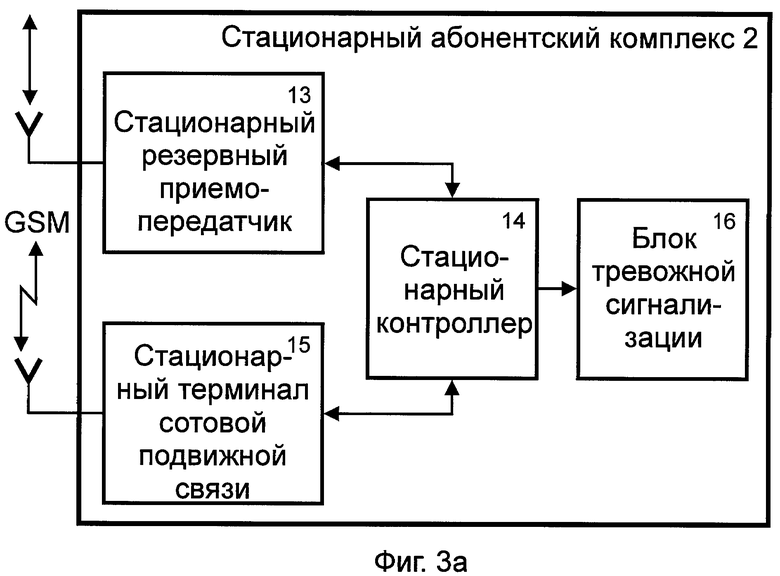
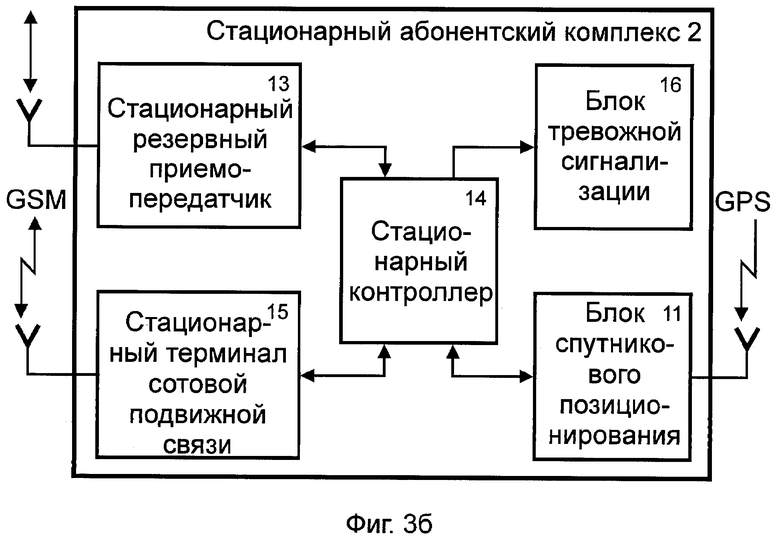
На фиг.3а и фиг.3б показаны варианты структурных схем построения стационарного абонентского комплекса.
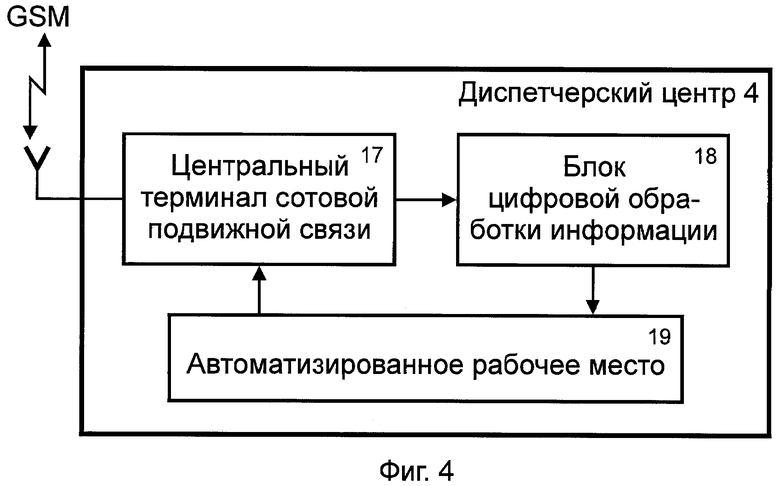
На фиг.4 показана структурная схема построения диспетчерского центра.
На фиг.5 показана структурная схема построения комплекса реагирования.
На фиг.1 - фиг.5 использованы следующие обозначения: 1 - возимый абонентский комплекс; 2 - стационарный абонентский комплекс; 3 - комплекс реагирования; 4 - диспетчерский центр; 5 - датчики состояния; 6 - охранно-противоугонная подсистема; 7 - центральный блок управления; 8 - возимый терминал сотовой подвижной связи; 9 - возимый контроллер; 10 - блок коммутации; 11 - блок спутникового позиционирования; 12 - возимый резервный приемопередатчик; 13 - стационарный резервный приемопередатчик; 14 - стационарный контроллер; 15 - стационарный терминал сотовой подвижной связи; 16 - блок тревожной сигнализации; 17 - центральный терминал сотовой подвижной связи; 18 - блок цифровой обработки информации; 19 - автоматизированное рабочее место; 20 - исполнительные органы; 21 - органы тревожной сигнализации; 22 - объектовый терминал сотовой подвижной связи; 23 - блок согласования формата данных; 24 - персональный навигатор; 25 - автономный радиомаяк; 26 - трекер.
Рассматриваемая система охраны и поиска УТС (фиг.1) содержит связанные друг с другом посредством сотовой сети подвижной связи, например GSM-сети, возимые абонентские комплексы 1, стационарные абонентские комплексы 2, комплексы 3 реагирования и диспетчерский центр 4.
Возимые абонентские комплексы 1 (фиг.2) установлены на обслуживаемых ТС и выполнены с возможностью реализации охранно-противоугонных функций, осуществления спутникового позиционирования обслуживаемого ТС, например с помощью GPS, а также с возможностью дополнительного излучения сигналов на частотах, отличных от частот, используемых в сотовой сети подвижной связи.
Стационарные абонентские комплексы 2 (фиг.3а, фиг.3б) выполнены с обеспечением следующих возможностей:
- приема от возимого абонентского комплекса 1 сигналов по резервному помехозащищенному каналу ("возимый резервный приемопередатчик 12 - стационарный резервный приемопередатчик 13");
- ретрансляции принятых сигналов по сотовой сети подвижной связи в диспетчерский центр 4;
- приема из диспетчерского центра 4 по сотовой сети подвижной связи командных сообщений (в том числе команд блокирования движения ТС и команд тревожной сигнализации);
- ретрансляции принятых командных сообщений в возимый абонентский комплекс 1 по сотовой сети подвижной связи и/или по помехозащищенному резервному каналу.
Ниже рассматривается выбранный вариант блок-схем построения перечисленных выше функциональных узлов рассматриваемой системы: возимых 1 и стационарных 2 абонентских комплексов, комплексов 3 реагирования и диспетчерского центра 4.
Каждый возимый абонентский комплекс 1 (фиг.2) содержит блок 11 спутникового позиционирования, например GPS-приемник, возимый контроллер 9, а также охранно-противоугонную подсистему 6, связанную своими первыми входом и выходом с возимым контроллером 9 и выполненную с возможностью подключения своими вторыми входом и выходом ко входу и выходу системы зажигания ТС. Кроме того, в состав возимого абонентского комплекса 1 входят возимый терминал 8 сотовой подвижной связи, возимый резервный приемопередатчик 12, входящий в состав помехозащищенного резервного канала связи со стационарным абонентским комплексом 2 и блок 10 коммутации. Роль источника дополнительного излучения играет автономный радиомаяк 25.
Через блок 10 коммутации осуществляется связь между отдельными составными частями возимого абонентского комплекса 1. Блок 10 коммутации связан:
- первыми входом и выходом - с возимым контроллером 9;
- вторыми входом и выходом - с возимым терминалом 8 сотовой подвижной связи;
- третьими входом и выходом - с возимым резервным приемопередатчиком 12;
- четвертыми входом и выходом - с блоком 11 спутникового позиционирования.
Охранно-противоугонная подсистема 6, входящая в состав возимого абонентского комплекса 1 (фиг.2), содержит центральный блок 7 управления, первые вход и выход которого являются первыми входом и выходом охранно-противоугонной подсистемы 6, а вторые вход и выход - вторыми входом и выходом охранно-противоугонной подсистемы 6. В состав охранно-противоугонной подсистемы 6 входят также датчики 5 состояния, органы 21 тревожной сигнализации и исполнительные органы 20, выполненные с возможностью блокирования движения обслуживаемого ТС. Информационные входы центрального блока 7 управления подключены к выходам датчиков 5 состояния, а выходы тревожной сигнализации и управляющие выходы, соответственно, - к органам 21 тревожной сигнализации и к исполнительным органам 20.
Стационарный абонентский комплекс 2 (фиг.3а) содержит последовательно связанные друг с другом стационарный резервный приемопередатчик 13 (входящий в состав помехозащищенного резервного канала связи с возимым абонентским комплексом 1), стационарный контроллер 14 и стационарный терминал 15 сотовой подвижной связи. В состав стационарного абонентского комплекса 2 входит также блок 16 тревожной сигнализации, вход которого подключен к третьему выходу стационарного контроллера 14.
Другой возможный вариант построения стационарного абонентского комплекса 2 (фиг.3б) содержит, в дополнение к перечисленным выше элементам, блок 11 спутникового позиционирования, связанный со стационарным контроллером 14.
Диспетчерский центр 4 (фиг.4) содержит последовательно соединенные центральный терминал 17 сотовой подвижной связи, блок 18 цифровой обработки информации и автоматизированное рабочее место 19, выход которого подключен ко входу центрального терминала 17 сотовой подвижной связи.
Каждый комплекс 3 реагирования (фиг.5) содержит последовательно соединенные объектовый терминал 22 сотовой подвижной связи, блок 23 согласования формата данных и персональный навигатор 24, выход которого подключен ко входу объектового терминала 22 сотовой подвижной связи. В состав комплекса 3 реагирования входит также трекер 26, выполненный с возможностью активации автономного радиомаяка 25, входящего в состав соответствующего возимого абонентского комплекса 1 и являющегося источником дополнительного излучения. Трекер 26 обладает возможностью пеленгации этого источника дополнительного излучения.
Охранно-противоугонная подсистема 6, входящая в состав возимых абонентских комплексов 1 (фиг.2), построена по стандартной схеме, используемой в большинстве охранно-противоугонных систем, выпускаемых предприятием-заявителем ("Автомобильные охранные системы", каталог 2007, ООО "АЛЬТОНИКА", выпуск №10). В качестве датчиков 5 состояния могут быть использованы соответствующие контрольно-измерительные преобразователи, позволяющие определять состояния различных узлов и агрегатов обслуживаемого ТС и отслеживать изменения указанных состояний. Датчиками 5 состояния могут быть, в частности, охранные извещатели - технические средства охранной сигнализации, служащие для обнаружения несанкционированного воздействия на охраняемый объект, которым в данном случае является обслуживаемое ТС. Роль охранных извещателей могут играть, например, датчик удара, датчик объема, концевые выключатели, применяемые в вышеупомянутом ближайшем аналоге (www.loiack.ru).
В качестве исполнительных органов 20 могут применяться различные виды иммобилайзеров и блокирующих реле, широко представленных в номенклатуре серийной продукции предприятия-заявителя ("Автомобильные охранные системы", каталог 2005, ООО "АЛЬТОНИКА", выпуск №8, с.8-12). Органы 21 тревожной сигнализации могут быть представлены сиреной и световыми сигнализаторами, которыми оснащено большинство ТС. Центральный блок 7 управления представляет собой программируемый микропроцессор и используется практически во всех охранно-противоугонных системах.
Возимый терминал 8 сотовой подвижной связи входит в состав серийных информационно-охранных систем "REEF GSM" моделей 1000 и 2000 ("Автомобильные охранные системы", ООО "АЛЬТОНИКА", каталог 2005, выпуск №8, с.20, 21), а блок 11 спутникового позиционирования является одной из составных частей серийных спутниковых информационно-поисковых систем "REEF GSM" модели 3000 ("Автомобильные охранные системы", ООО "АЛЬТОНИКА", каталог 2005, выпуск №8, с.22-24).
В качестве блока 10 коммутации может быть использована общая мультиплексная шина, в частности, CAN-шина. CAN-шина (Controller Area Network), разработанная фирмой BOSCH в середине восьмидесятых годов и в настоящее время принятая в качестве стандартной для всех производителей автомобильной электроники в Европе. Элементная база, поддерживающая CAN-технологию, выпускается в индустриальном исполнении (www.gaw.ru).
Автономный радиомаяк 25 ("закладка") предназначен для реализации послеугонных функций в тех случаях, когда злоумышленниками заглушен не только GSM-канал, но и система GPS, а охранно-противоугонная подсистема 6 демонтирована. Автономный радиомаяк 25 представляет собой миниатюрный полностью автономный радиомаячок с возможностью активации, не зависящей от глушение GSM-канала. Автономный радиомаяк 25 скрытно устанавливается, например под обшивкой в салоне ТС, и практически не имеет демаскирующих признаков, в частности проводов подключения. Благодаря экономичному режиму работы (длительный период радиомолчания, кратковременный выход в эфир с небольшой мощностью и значительной скважностью излучения), автономный радиомаяк 25 имеет длительный срок службы (не менее двух лет).
Возимый резервный приемопередатчик 12 предназначен для передачи в стационарные абонентские комплексы 2 кодовых тревожных сообщений (в том числе координат ТС) и приема от стационарного резервного приемопередатчика 13 команд блокирования и включения тревожной сигнализации в тех случаях, когда GSM-канал возимого абонентского комплекса 1 заглушен помехой.
Отличительной особенностью рассматриваемой системы, по сравнению с ближайшим аналогом, является выполнение стационарных абонентских комплексов 2 в виде "персональных ретрансляторов". Каждый такой "персональный ретранслятор" представляет собой малогабаритный прибор, чуть больше сотового телефона, устанавливаемый в помещении и подключаемый к источнику питания (например, к сети 220 В). Он предназначен для обмена информацией с любым находящимся поблизости возимым абонентским комплексом 1 по вышеупомянутому помехозащищенному каналу связи между возимым резервным приемопередатчиком 12 и стационарным резервным приемопередатчиком 13. Передача этой информации в диспетчерский центр 4 и получение из него необходимых командных сообщений осуществляются стандартным образом - по GSM-каналу. Это позволяет нейтрализовать действие помех в случае применения их злоумышленниками. Такой "персональный ретранслятор" может быть собственностью диспетчерского центра 4 и размещаться как на специально выделенных площадках, так и в квартире или коттедже клиента системы. В последнем случае он может передаваться клиенту в аренду под небольшую залоговую стоимость. При размещении "персонального ретранслятора" в квартире владельца ТС он может дополнительно служить в качестве сверхдальнего персонального приемника, оповещающего владельца о несанкционированном воздействии на принадлежащее ему ТС.
Используемые в автономном радиомаяке 25, возимом резервном приемопередатчике 12 и в стационарном резервном приемопередатчике 13 технические решения, обеспечивающие помехоустойчивость и большую дальность действия, основаны на применении технологии Узкополосных Прыгающих Частот (хоппинг-технологии). Технические решения, относящиеся к вопросам передачи и приема хоппинг-сигналов в различных охранных системах защищены патентами предприятия-заявителя, например: RU №2220859, В60R 25/00, G08В 25/00, RU №2228860, В60R 25/00, G08В 25/10, RU №2244642, В60R 25/00.
Стационарный резервный приемопередатчик 13, обеспечивающий прием и обработку указанных хоппинг-сигналов, может быть реализован с использованием доступных на коммерческом рынке изделий вычислительной техники, выпускаемых американской компанией Analog Devices, Inc.: кодека AD 1836 и цифрового процессора быстрого преобразования Фурье ADSP 2116 IN серии SHARK. 274.
Системы передачи извещений, использующие хоппинг-технологию, разрабатываются предприятием-заявителем с 2000 года. В 2004 году первая такая система была представлена на рынок систем охраны стационарных объектов. В настоящее время серийно выпускается и реализуется на практике радиоканальная аппаратура охранной сигнализации "РИФ СТРИНГ-202" (сертификат соответствия № РОСС RU.ME96.H00513) и различные ее модификации.
Все представленные на фиг.4 функциональные узлы диспетчерского центра 4 входят в состав радиоканальной системы мониторинга и сопровождения ТС, защищенной патентом предприятия-заявителя RU №2240938, В60R 25/00, G08В 25/10.
Входящая в состав комплекса 3 реагирования (фиг.5) цепь "объектовый терминал 22 сотовой подвижной связи → блок 23 согласования формата данных → персональный навигатор 24" используется в созданном на предприятии-заявителе макете информационно-навигационной системы по патенту RU №2266217, В 60R 25/10, G08В 25/10. Особенностью этой информационно-навигационной системы является применение в ней персонального навигатора 24, не требующего установки крупногабаритных выносных антенн, отличающегося простотой и удобством в эксплуатации, благодаря стрелочному (по типу магнитного компаса) методу отображения направления движения на цель. К этому классу устройств относится, например, широко известный и доступный на коммерческом рынке персональный навигатор "GARMIN GPS 38", далее, для краткости, GPS-38 (www.badger.rn).
Устанавливаемый на ТС быстрого реагирования трекер 26 - радиопеленгационное устройство, включающее в себя пеленгационную антенну с блоками компьютерной обработки и отображения информации о дальности и пеленге автономного радиомаяка 25, установленного на УТС. Аналогичное устройство применяется в аппаратуре ближайшего аналога (Руководство по эксплуатации "Радиопоисковая система ЛОДЖЕК", Москва, 1998).
Таким образом, все представленные на фиг.1 - фиг.5 функциональные узлы известны и выпускаются серийно. Поэтому возможность практической реализации предлагаемой системы не вызывает сомнений.
Рассматриваемая система охраны и поиска УТС (фиг.1) работает следующим образом.
В процессе охраны и поиска УТС участвуют: возимые 1 и стационарные 2 абонентские комплексы, а также комплексы 3 реагирования и диспетчерский центр 4. Указанные функциональные узлы связаны друг с другом посредством сотовой сети подвижной связи. Для определения местоположение объектов используется спутниковая система позиционирования, например GPS. Определение местоположения УТС на заключительной стадии его поиска и перехвата осуществляется комплексами 3 реагирования. При этом местоположение УТС (пеленг, дальность) они определяют в собственной системе координат.
Структурные схемы построения основных узлов рассматриваемой системы могут варьироваться, в зависимости от конкретных условий ее применения. Рассмотрение работы системы проводится далее применительно к варианту, представленному на фиг.2 - фиг.5.
Режим оповещения о попытке несанкционированного использования обслуживаемого ТС активируется в возимом абонентском комплексе 1 (фиг.2) автоматически после срабатывания датчиков 5 состояния охранно-противоугонной подсистемы 6. Посылаемые ими тревожные извещения поступают в центральный блок 7 управления, который формирует соответствующее кодовое тревожное сообщение. При этом в определенные поля кодового тревожного сообщения включаются хранящиеся в центральном блоке 7 управления коды идентификационных признаков обслуживаемого ТС (государственный номер, марка, цвет, данные о владельце и другие данные) и коды параметров состояния ТС (вторжение в салон, несанкционированное вскрытие капота, багажника и ряд других), которые в простейшем случае определяются в центральном блоке 7 управления по номеру датчика 5 состояния, от которого пришел тревожный сигнал.
Для последующей передачи по GSM-каналу это тревожное сообщение необходимо переслать в возимый терминал 8 сотовой подвижной связи. Для обеспечения указанной пересылки центральный блок 7 управления передает тревожное сообщение в возимый контроллер 9, который через блок 10 коммутации запрашивает в блоке 11 спутникового позиционирования текущие координаты возимого абонентского комплекса 1. Если блок 11 спутникового позиционирования не заглушен помехой, то, получив указанный запрос, он передает в возимый контроллер 9 текущие географические координаты возимого абонентского комплекса 1. Коды указанных координат добавляются в соответствующие поля сформированного возимым контроллером 9 кодового тревожного сообщения. В результате формируется единое кодовое тревожное сообщение, содержащее идентификационную информацию и данные о местонахождении возимого абонентского комплекса 1, которое подается на первый вход блока 10 коммутации.
Если GSM-канал не заглушен помехой, то единое кодовое тревожное сообщение поступает в возимый терминал 8 сотовой подвижной связи через блок 10 коммутации и передается по GSM-каналу в диспетчерский центр 4. В случае нейтрализации GSM-канала преднамеренной помехой возимый терминал 8 сотовой подвижной связи подает через блок 10 коммутации в возимый контроллер 9 команду подключения возимого резервного приемопередатчика 12. В этом случае указанное единое кодовое тревожное сообщение через блок 10 коммутации переправляется на вход возимого резервного приемопередатчика 12.
Посланный возимым резервным приемопередатчиком 12 сигнал принимается стационарным резервным приемопередатчиком 13, входящим в состав одного или нескольких стационарных абонентских комплексов 2 (фиг.3а и фиг.3б), находящихся в зоне действия возимого резервного приемопередатчика 12. Далее код принятого сигнала через стационарный контроллер 14 передается в стационарный терминал 15 сотовой подвижной связи.
Указанный стационарный терминал 15 сотовой подвижной связи преобразует этот сигнал в формат, используемый в сотовой сети подвижной связи, например в формат SMS-сообщения, и посылает его по сотовой сети подвижной связи в диспетчерский центр 4.
Один из стационарных резервных приемопередатчиков 13, принявших сигнал единого кодового тревожного сообщения, может входить в состав стационарного абонентского комплекса 2 владельца ТС, возимый абонентский комплекс 1 которого сформировал данное единое кодовое тревожное сообщение. В этом случае данные о владельце ТС, входящие в число идентификационных признаков обслуживаемого ТС, содержащихся в едином кодовом тревожном сообщении, должны соответствовать данным о владельце ТС, хранящимся в памяти стационарного контроллера 14. При пересылке единого кодового тревожного сообщения из стационарного резервного приемопередатчика 13 в стационарный терминал 15 сотовой подвижной связи стационарный контроллер 14 обнаруживает данное соответствие. В этом случае данное единое кодовое тревожное сообщение преобразуется стационарным контроллером 14 в соответствующую команду, которая передается в блок 16 тревожной сигнализации, вызывая, например, срабатывание звуковой сигнализации и/или мигание лампы аварийной световой сигнализации.
SMS-сообщения, переданные в диспетчерский центр 4 каждым из стационарных терминалов 15 сотовой подвижной связи, несут информацию о местонахождении данного возимого абонентского комплекса 1. Если блок 11 спутникового позиционирования возимого абонентского комплекса 1 не заглушен помехой, то каждый ретранслированный таким образом сигнал несет высокоточную информацию о местоположении данного возимого абонентского комплекса 1. Если указанный блок 11 спутникового позиционирования нейтрализован помехой, то местоположение ТС, пославшего кодовое тревожное сообщение, определяется грубо, по набору координат стационарных абонентских комплексов 2, ретранслировавших сигнал - в виде начального целеуказания. При этом координаты стационарного абонентского комплекса 2 указываются в соответствующих разрядах SMS-сообщения. Эти координаты могут быть либо измерены блоком 11 спутникового позиционирования, либо запомнены в стационарном контроллере 14 при предварительном измерении.
Сигналы (SMS-сообщения), переданные стационарным абонентским комплексом 2 - "персональным ретранслятором" - через сотовую сеть подвижной связи, принимаются в диспетчерском центре 4 (фиг.4) центральным терминалом 17 сотовой подвижной связи. Он осуществляет их предварительную обработку и подает на вход блока 18 цифровой обработки информации. В блоке 18 цифровой обработки информации вначале осуществляется первичная обработка сигналов, включающая в себя аналого-цифровое преобразование и цифровую фильтрацию для увеличения отношения сигнал/шум. Затем из принятого кодового тревожного сообщения выделяются идентификационные и служебные коды, характеризующие данный возимый абонентский комплекс 1, как источник кодового тревожного сообщения, и соседние с ним стационарные абонентские комплексы 2, как "персональные ретрансляторы", а также коды навигационных параметров, характеризующих местоположение указанных "персональных ретрансляторов". Далее, осуществляется вторичная цифровая обработка указанной информации, которая позволяет идентифицировать источник тревожного сообщения и напрямую (если блок 11 спутникового позиционирования не заглушен помехой) либо косвенно - по местоположению соседних с ним стационарных абонентских комплексов 2 - "персональных ретрансляторов" - определить зону нахождения обслуживаемого ТС, подвергшегося несанкционированному воздействию со стороны злоумышленников. Для этого стационарные резервные приемопередатчики 13 могут быть выполнены с возможностью пеленгации излучения возимого резервного приемопередатчика 12.
Обработанные цифровые данные предназначены для оператора диспетчерского центра 4 и поступают для отображения и принятия решений на его автоматизированное рабочее место 19 с выхода блока 18 цифровой обработки информации. В автоматизированном рабочем месте 19, в соответствии с полученными кодами идентификационных признаков, формируется запрос на вызов хранящихся в памяти автоматизированного рабочего места 19 текстовых данных об У ТС. Одновременно, в соответствии с полученными кодами навигационных параметров, формируется запрос на вызов хранящихся в памяти автоматизированного рабочего места 19 фрагментов карты-схемы местности, соответствующих измеренным навигационным параметрам. При этом, как правило, в качестве фрагментов карты-схемы местности, используются фрагменты цифровой модели улично-дорожной сети.
Вызванная указанными запросами информация преобразуется в формат двумерного изображения и отображается на мониторе автоматизированного рабочего места 19. Вид этого двумерного изображения должен быть удобен для анализа оператором диспетчерского центра 4. На экран монитора может выводиться также текстовая информация (например, государственный номер, цвет, марка обслуживаемого ТС, его географические координаты, данные о владельце и другая информация).
Полученная информация позволяет оператору диспетчерского центра 4 оперативно идентифицировать владельца ТС, которое подверглось несанкционированному воздействию со стороны злоумышленников. По сотовой сети подвижной связи оператор диспетчерского центра 4 сообщает о факте несанкционированного воздействия владельцу данного ТС и ждет его ответной реакции.
Если пользователь отвечает, что тревожное сообщение оказалось ложной тревогой, например, что ТС находится в данный момент в поле его зрения и ничего опасного с ним не происходит, просто на капот прыгнула кошка, то полученная информация фиксируется в долговременной памяти автоматизированного рабочего места 19. На этом действия оператора диспетчерского центра 4 заканчиваются.
Если владелец ТС не в состоянии ни подтвердить факт несанкционированного воздействия на ТС, ни исключить такую возможность, диспетчерский центр 4 переходит в режим ожидания. Характер последующих действий оператора зависит при этом от дальнейшего развития событий.
Так, если злоумышленнику удалось проникнуть в салон ТС и включить зажигание, то в центральный блок 7 управления подается команда, по которой центральный блок 7 управления начинает процесс идентификации пользователя. Как правило, для этого используется метка, которая должна находиться у пользователя ТС (на фиг.2 она не показана). При идентификации метки пользователя центральный блок 7 управления подтверждает включение зажигания. Если же указанная метка отсутствует, либо содержащийся в сигнале метки код не совпадает с идентификационным кодом, хранящимся в памяти центрального блока 7 управления, то центральный блок 7 управления не выдает сигнала подтверждения включения зажигания, и двигатель ТС глохнет. Кроме того, в последнем случае центральный блок 7 управления формирует и подает через возимый контроллер 9 в блок 10 коммутации команду подтверждения факта угона ТС.
Если GSM-канал не заглушен помехой, то команда подтверждения факта угона ТС поступает в возимый терминал 8 сотовой подвижной связи через блок 10 коммутации и передается по GSM-каналу в диспетчерский центр 4.
При глушении возимого терминала 8 сотовой подвижной связи помехой указанная команда через блок 10 коммутации направляется в возимый резервный приемопередатчик 12, излучается им в эфир и после ретрансляции одним или несколькими стационарными абонентскими комплексами 2 попадает к оператору диспетчерского центра 4. Получив указанное уведомление, оператор диспетчерского центра 4 вновь запрашивает владельца ТС и после получения от него согласия на поиск и перехват УТС начинает взаимодействовать с силами реагирования (пешими нарядами, специальными и/или патрульными ТС реагирования), оснащенными комплексами 3 реагирования (фиг.5).
Для учета движения УТС в диспетчерском центре 4 используются хорошо известные алгоритмы автосопровождения (например, "Справочник по радиолокации" под редакцией М. Сколника, Москва, Советское Радио, 1978, глава 1). Сопровождение ведется вначале по сигналам, излучаемым возимым резервным приемопередатчиком 12 и ретранслируемым стационарными абонентскими комплексами 2. Система может одновременно сопровождать несколько УТС. Сопровождение осуществляется под визуальным контролем оператора диспетчерского центра 4, который может вручную изменять на автоматизированном рабочем месте 19 параметры сопровождения (период обновления данных, коэффициенты сглаживания траектории и другие параметры). Отображение движения УТС осуществляется на экране монитора автоматизированного рабочего места 19 в виде траектории движения условной отметки УТС на фоне соответствующего фрагмента карты-схемы местности. Как правило, УТС движется по улично-дорожной сети. Наличие перед глазами оператора диспетчерского центра 4 фрагментов карты-схемы улично-дорожной сети существенно облегчает его работу, повышает устойчивость сопровождения и дает оператору определенный запас времени и уверенности для принятия решений.
Координаты определяются на борту УТС путем решения навигационных уравнений (естественно, если блок 11 спутникового позиционирования не заглушен помехой). Область нахождения УТС (микросота GPS-приемника) отображается в виде окружности с радиусом, определяемым ошибкой GPS-приемника (в составе блока 11 спутникового позиционирования). При движении УТС по дороге местоположение данного круга на карте смещается, в соответствии с показаниями GPS-приемника, а размеры области пересечения указанного круга с дорогой определяют оценку значения плоскостных ошибок измерений. Решения навигационных уравнений в блоке 11 спутникового позиционирования проводятся с частотой получения спутниковых радионавигационных данных, как правило, дважды в секунду.
Если блок 11 спутникового позиционирования нейтрализован злоумышленниками с помощью помехи, то местоположение УТС определяется по навигационным данным, переданным стационарными абонентскими комплексами 2, играющими роль "персональных ретрансляторов". Точность такого определения местоположения УТС невысока, однако она вполне достаточна для начального целеуказания силам реагирования.
Важную информацию для повышения точности начального целеуказания и дальнейшего устойчивого сопровождения УТС дает использование в блоке 18 цифровой обработки информации цифровой модели улично-дорожной сети в виде набора линейных сегментов и узлов. Лишь совокупность навигационных данных и цифровой модели улично-дорожной сети позволяет осуществлять надежное, устойчивое сопровождение движущихся УТС.
Переключив рассматриваемую систему в режим сопровождения УТС, оператор диспетчерского центра 4 приступает к заключительной фазе операции - к поиску и перехвату УТС с использованием сил реагирования. Для этого он выделяет определенный наряд сил реагирования, оснащенных комплексами 3 реагирования, и передает им начальное целеуказание, а именно указывает на карте-схеме зону вероятного нахождения УТС. Координация дальнейшего выдвижения к зоне вероятного нахождения УТС сил реагирования, например нескольких оснащенных комплексами 3 реагирования ТС реагирования, осуществляется путем обмена информацией по сотовой сети подвижной связи экипажей ТС реагирования друг с другом и с оператором диспетчерского центра 4.
Задача сил реагирования может быть существенно облегчена, если УТС будет принудительно остановлено. Такая возможность может быть реализована путем подачи соответствующей команды либо из диспетчерского центра 4, либо из комплекса 3 реагирования, либо со стационарного абонентского комплекса 2. В зависимости от помеховой обстановки, прием указанной команды может быть осуществлен возимым абонентским комплексом 1 либо на возимый терминал 8 сотовой подвижной связи, либо на возимый резервный приемопередатчик 12. Далее, команда блокирования движения УТС последовательно через блок 10 коммутации и через возимый контроллер 9 поступает в центральный блок 7 управления, который посылает ее на соответствующие исполнительные органы 20, например на иммобилайзер или на управляемое реле, которое блокируют подачу топлива. Одновременно, центральный блок 7 управления может подать аналогичную команду на органы 21 тревожной сигнализации, например сирену или органы световой сигнализации - для привлечения к УТС внимания окружающих и отпугивания злоумышленников.
Обмен информацией по сотовой сети подвижной связи экипажей ТС реагирования друг с другом и с оператором диспетчерского центра 4 осуществляется с помощью входящего в состав комплексов 3 реагирования объектового терминала 22 сотовой подвижной связи и входящего в состав диспетчерского центра 4 центрального терминала 17 сотовой подвижной связи.
В варианте построения комплекса 3 реагирования, показанном на фиг.5, сигнал с выхода указанного объектового терминала 22 сотовой подвижной связи через блок 23 согласования формата данных подается в персональный навигатор 24, с помощью которого экипаж ТС реагирования координирует свое движение к УТС.
После вхождения ТС реагирования в зону вероятного нахождения УТС начинается заключительная фаза операции, на которой основную роль играют комплексы 3 реагирования и установленный на борту УТС автономный радиомаяк 25.
Пеленгацию УТС осуществляет трекер 26, выполненный с возможностью приема и обработки сигналов автономного радиомаяка 25. Отображение информации может осуществляться как на экране персонального навигатора 24, так и на экране трекера 26.
Переданная по сотовой сети подвижной связи из диспетчерского центра 4 команда, содержащая целеуказание данному ТС реагирования, принимается его объектовым терминалом 22 сотовой подвижной связи. После преобразования (конвертации) в блоке 23 согласования формата данных рассматриваемое целеуказание передается в персональный навигатор 24, с помощью которого экипаж ТС реагирования координирует свое движение к цели.
После выхода ТС реагирования в район вероятного нахождения цели (то есть - УТС) оператор комплекса 3 реагирования с помощью передатчика трекера 26 посылает на борт УТС команду активации автономного радиомаяка 25.
Эта команда принимается автономным радиомаяком 25, после чего он начинает излучать сигналы, обеспечивающие возможность измерения трекером 26 пеленга и дальности до УТС.
Высокая помехозащищенность указанного пеленгационного канала достигается при возможном использовании в нем, как и в резервных каналах ретрансляции, хоппинг-сигналов.
Хоппинг-сигнал, излучаемый автономным радиомаяком 25, принимается трекером 26, содержащим приемник хоппинг-сигнала, выполненный с возможностью селекции в кодовых посылках информации об идентификационных признаках УТС и о категории сообщения. Прошедшие эту селекцию кодовые посылки преобразуются в трекере 26 в формат, используемый персональным навигатором 24. Если помеха не применяется и сотовая сеть подвижной связи обеспечивает передачу SMS-сообщений с координатным кодом текущего местоположения УТС, то канал хоппинг-сигнала используется персональным навигатором 24 в качестве дополнительного источника информации для определения местоположения УТС относительного ТС быстрого реагирования.
Особенностью персонального навигатора 24 является удобство в управлении - для обеспечения движения кратчайшим путем к заданной точке.
В операции по перехвату УТС такой заданной точкой является точка текущего местоположения УТС.
Персональный навигатор 24, например вышеупомянутый GPS-38, использует для указания и контроля направления движения угловые градусы, измеряемые (так же, как в магнитном компасе) по часовой стрелке от направления на Север (N). Для определения положения на местности GPS-приемнику, входящему в состав GPS-38, требуется в течение некоторого времени "наблюдать" одновременно, как минимум, три спутника GPS.
Для определения скорости движения ТС реагирования GPS-38 требуется "наблюдать" одновременно, как минимум, четыре спутника GPS. У GPS-38 имеются специальные входы для подключения внешних приборов, выдающих координатную информацию. В рассматриваемом комплексе 3 реагирования к этим входам подключаются блок 23 согласования формата данных и трекер 26. Внешней координатной информацией являются пеленг на УТС и дальность до него, измеренные с помощью трекера 26.
Таким образом, даже в самой неблагоприятной помеховой ситуации - при постановке злоумышленниками преднамеренных помех сотовым сетям подвижной связи и аппаратуре спутниковых систем позиционирования - рассматриваемая система охраны и поиска УТС сохраняет работоспособность и обеспечивает высокие точностные характеристики. В этих случаях перехват УТС осуществляется с использованием помехоустойчивого пеленгационного канала, образуемого автономным радиомаяком 25 и трекером 26.
Весьма полезным для ускорения выполнения операции по перехвату УТС является один из штатных режимов работы GPS-38 - режим обеспечения движения к цели кратчайшим путем с использованием экранной страницы "Прямой Путь". Использование этой страницы обеспечивает контроль параметров отклонения от предварительно заданного прямого пути к цели (то есть - к УТС). В процесс движения к намеченной цели в центре страницы условно отображается "шоссе", как бы "проложенное" к цели. Большая стрелка под изображением "шоссе" показывает истинный курс относительно прямого направления на цель. Для поддержания правильного курса оператор комплекса 3 реагирования должен постоянно совмещать указанную стрелку с указателем на шкале графического индикатора. При приближении к конечной цели маршрута (то есть - к УТС) на "шоссе" появляется условное изображение "финишной черты". Когда изображение "финишной черты" дойдет до нижнего обреза изображения "шоссе", то это означает, что цель достигнута, то есть УТС находится где-то рядом - в зоне визуального контакта. Применение GPS-38 не требует от оператора комплекса 3 реагирования каких-либо профессиональных навыков, поэтому указанный прибор доступен любому члену экипажа ТС быстрого реагирования.
Таким образом, предлагаемое техническое решение позволяет решить поставленную задачу - создать систему охраны и поиска УТС, обеспечивающую скрытную передачу сигналов тревожного оповещения с борта УТС. Эта система сохраняет свою работоспособность в любой, даже самой неблагоприятной помехой обстановке, когда злоумышленникам с помощью преднамеренных помех удалось нейтрализовать каналы сотовой сети подвижной связи и системы спутникового позиционирования.
Обеспечиваемый технический результат заключается в применении помехоустойчивых резервных каналов ретрансляции сигналов тревожного оповещения, использующих стационарные абонентские комплексы 2, установленные как на специальных площадках, так и в квартире или коттедже владельца обслуживаемого ТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕДОЗВОЛЕННОГО ИСПОЛЬЗОВАНИЯ ИЛИ КРАЖИ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2357880C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ОБ УГОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2363600C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
Изобретение относится к системам мониторинга, сопровождения и управления наземными транспортными средствами (ТС). Имеются связанные друг с другом посредством сотовой сети подвижной связи (ССПС) возимые абонентские комплексы, комплексы реагирования и диспетчерский центр. Возимые абонентские комплексы установлены на обслуживаемых ТС, выполнены с возможностью реализации охранно-противоугонных функций, осуществления спутникового позиционирования обслуживаемого ТС и оборудованы источниками дополнительного излучения сигналов на частотах, отличных от частот ССПС. Комплексы реагирования установлены на ТС реагирования и/или находятся у пеших нарядов реагирования и выполнены с возможностью активации и пеленгации источников дополнительного излучения сигналов, расположенных в возимых абонентских комплексах. Диспетчерский центр принимает, обрабатывает и отображает информацию от возимых абонентских комплексов и от комплексов реагирования, включая определение местонахождения обслуживаемых ТС и сил реагирования, а также передает им командные сообщения. В систему введены стационарные абонентские комплексы, выполненные с возможностью приема от возимых абонентских комплексов сигналов по ССПС и/или резервным помехозащищенным каналам, ретрансляции этих сигналов по ССПС в диспетчерский центр, приема из диспетчерского центра по ССПС командных сообщений, в том числе команд блокирования движения ТС и команд тревожной сигнализации, и ретрансляции командных сообщений в возимые абонентские комплексы по ССПС и/или помехозащищенным резервным каналам связи. Возимые абонентские комплексы передают сигналы к стационарным абонентским комплексам и принимают от них командные сообщения по ССПС и/или резервным помехозащищенным каналам связи. 6 з.п. ф-лы, 5 ил.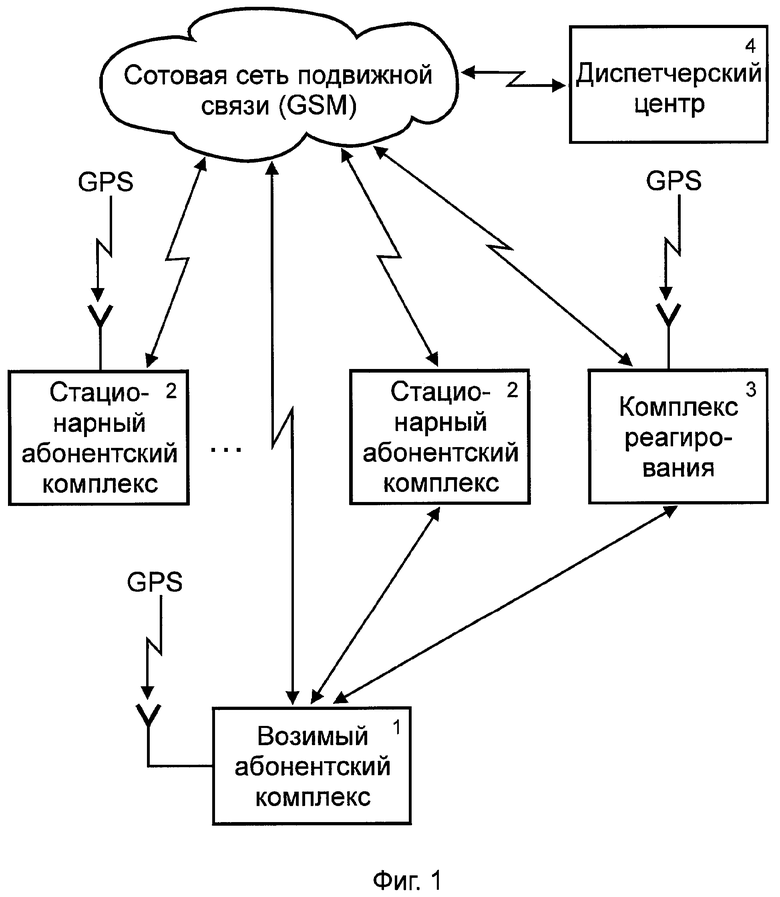
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2001 |
|
RU2217797C2 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |

