Изобретение относится к радиопоисковым технологиям, используемым для борьбы с угонами транспортных средств (ТС), и предназначено для обеспечения оперативного поиска и перехвата угнанных транспортных средств (УТС).
Известна система мониторинга, информационного обслуживания и охраны объектов от несанкционированного воздействия по патенту DE №4415052, В 60 R 25/00, содержащая телефонную сеть связи и передачи данных, подключенную к пейджинговой сети связи, содержащей операторский блок передачи данных и установленные на объектах абонентские приемники, выполненные с возможностью запуска передатчиков маячкового типа при приеме по пейджинговой сети связи маячковых кодов, а также территориально распределенные на улично-дорожной сети стационарные приемопередатчики (ретрансляторы), выполненные с возможностью приема сигналов тревоги от передатчиков маячкового типа и с возможностью передачи сообщений, по крайней мере, на одну из базовых станций, связанных с диспетчерским центром, содержащим последовательно включенные блок приема и блок первичной обработки, выходы которого подключены, соответственно, к блоку регистрации и к блоку отображения.
Недостатками указанной системы являются большое время задержки с момента начала угона до момента подачи сигнала тревоги и низкая точность определения местоположения УТС, что существенно снижает эффективность указанной системы.
На устранение указанных недостатков направлено техническое решение по патенту RU №2174923, В 60 R 25/00, в котором описана система мониторинга, информационного обслуживания и охраны подвижных и неподвижных объектов, содержащая телефонную сеть связи и передачи данных, подключенную к пейджинговой сети связи, включающей в себя абонентский блок передачи данных и связанные с ним по радиоэфиру абонентские приемники, установленные на объектах абонентов системы, каждый из которых связан с помощью контроллера с датчиками несанкционированного воздействия, с блоком запуска абонентского передатчика и с блоком управления исполнительным устройством охранной системы, например иммобилайзером, подключенным к исполнительному устройству охранной системы и выполненным с возможностью включения и выключения исполнительного устройства охранной системы, например иммобилайзера, при приеме по пейджинговой сети связи специальных кодов, а также территориально распределенную сеть ретрансляторов-пеленгаторов, установленных на светофорных объектах, столбах городского освещения, крышах зданий и других стационарных объектах, выполненных с возможностью приема кодовых посылок от абонентского передатчика при нахождении несущего его объекта в зоне действия данного ретранслятора-пеленгатора и с возможностью передачи принятых сообщений, по крайней мере, на одну из базовых станций территориально распределенной сети базовых станций, а также информационные центры, каждый из которых содержит последовательно соединенные блок приема информации, блок первичной цифровой обработки, блок вторичной обработки, блок формирования информационных сообщений и формирователь голосовых сообщений, связанный с территориально распределенной сетью центров оперативного реагирования, блок приема и обработки сообщений из внешних информационных источников, входы которого соединены по каналам связи с внешними информационными источниками, первый выход которого связан с соответствующим входом блока вторичной обработки, а второй выход - со вторым входом блока формирования информационных сообщений, блок регистрации и блок отображения, входы которых соединены с соответствующими выходами блока первичной цифровой обработки, а выходы - с соответствующими входами блока вторичной обработки, выполненного с возможностью определения координат объектов по совокупности данных о местоположении ретрансляторов-пеленгаторов, принявших от абонентских передатчиков сигналы, мощности которых превышают заданный уровень, и измеренным значениям мощностей принятых сигналов и пеленгов на них, а также диспетчерский центр, в состав которого включены последовательно соединенные дополнительный блок приема, дополнительный блок первичной цифровой обработки, блок формирования информационных сообщений диспетчерского центра и формирователь голосовых сообщений диспетчерского центра, выход которого подключен к территориально распределенной сети центров оперативного реагирования, каждый из которых выполнен с возможностью регистрации и протоколирования голосовых сообщений, а также с возможностью определения местоположения сил и средств оперативного реагирования - пеших нарядов и патрульных автомобилей - на улично-дорожной сети и с возможностью вызова ближайшего к излучающему абонентскому передатчику пешего наряда или патрульного автомобиля и управления ими в процессе сближения с объектом, излучающим сигнал тревоги, при этом средства оперативного реагирования выполнены с возможностью измерения полярных координат абонентского передатчика, излучающего сигнал, при этом каждая из базовых станций подключена к соответствующему входу дополнительного блока приема, находящегося в диспетчерском центре, а каждый дополнительный выход блока формирования информационных сообщений диспетчерского центра соединен со входом блока приема соответствующего информационного центра, в каждом информационном центре второй выход блока формирования информационных сообщений подключен к пейджинговой сети связи, а второй выход формирователя голосовых сообщений - к телефонной сети связи и передачи данных.
Недостатки указанной системы связаны со сложностью размещения на местности, особенно в городских условиях, достаточного количества ретрансляторов-пеленгаторов и базовых станций, которые могли бы обеспечить непрерывное покрытие заданной территории (города, региона). Это требует больших капитальных затрат и многочисленных согласований с территориальными органами власти и управления. Поэтому на практике зона действия таких систем представляет собой набор отдельных сегментов, покрывающих лишь часть территории и не обеспечивающих непрерывность обзора.
На устранение указанного недостатка направлено техническое решение по патенту RU №2228861, В 60 R 25/00, G 08 В 25/08, выбранное в качестве прототипа настоящего изобретения.
Описанная в нем региональная сигнальная противоугонная система содержит установленные на охраняемом ТС датчики несанкционированного воздействия и подключенный через пейджинговую сеть связи к региональной телефонной сети абонентский приемник, выходы которых подключены к контроллеру, связанному с возимой частью блока идентификации пользователя и с приемопередающим модулем стандартной сотовой сети подвижной связи. В состав абонентского приемника может входить приемник глобальной спутниковой системы радионавигации (GPS-приемник), обеспечивающий высокоточное автономное измерение координат охраняемого ТС (или УТС). К соответствующим выходам контроллера подключены исполнительные устройства охранной системы, выполненные с возможностью блокирования движения УТС при поступлении в контроллер из абонентского приемника и/или из приемопередающего модуля стандартной сотовой сети подвижной связи команд блокирования двигателя, и автономное передающее устройство, связанное по радиоэфиру с установленными на объектах городской инфраструктуры ретрансляторами-пеленгаторами, входящими в состав специализированной сети передачи данных, содержащей также связанный с ретрансляторами-пеленгаторами центральный пункт управления специализированной сетью, выход которого подключен к установленному в диспетчерском центре блоку приема данных, выход которого через последовательно соединенные блок цифровой обработки информации и центральный блок формирования информационных сообщений подключен к диспетчерскому узлу связи, выполненному с возможностью передачи информационных сообщений по выделенным каналам региональной телефонной сети и/или через стандартную сотовую сеть подвижной связи в сеть информационных центров и в сеть центров быстрого реагирования, связанную с силами и средствами быстрого реагирования - пешими нарядами и патрульными автомобилями, обеспечивающими перехват УТС, при этом диспетчерский центр содержит систему управления базой данных (СУБД), связанную с внешним единым банком данных специализированной цифровой картографической основы, и сервер фрагментов специализированной цифровой картографической основы, например цифровой модели улично-дорожной сети, связанный с СУБД и с центральным блоком формирования информационных сообщений, при этом блоки вторичной обработки и отображения картографической и семантической информации выполнены с возможностью сопровождения отметок УТС на фоне указанных фрагментов специализированной цифровой картографической основы, а блоки формирования и передачи информационных сообщений - с возможностью трансляции в ближайшие к сопровождаемым УТС центры быстрого реагирования указанных фрагментов специализированной цифровой картографической основы с нанесенными на них отметками сопровождаемых УТС по выделенным каналам региональной телефонной сети и/или через стандартную сеть передачи данных.
Использование, наряду со специализированной сетью передачи данных, стандартной сотовой сети подвижной связи позволяет существенно расширить зону действия радиопоисковой системы и обеспечить непрерывность зоны покрытия территории. Кроме того, в сегментах, в которых зоны действия сотовой и специализированной сети передачи данных перекрываются друг с другом, повышаются надежность и качество доставки информации, что, в конечном счете, приводит к повышению эффективности перехвата УТС силами и средствами быстрого реагирования. Это является несомненным достоинством системы-прототипа.
Однако и данная система не свободна от недостатков. Дело в том, что стандартные сети пейджинговой связи и сотовые сети подвижной связи, в частности, стандарта GSM, уязвимы по отношению к преднамеренным (умышленным) помехам, которые может применить злоумышленник. Так, согласно рекламной информации израильской фирмы NetLine серийно выпускаемый этой фирмой постановщик помех C-Guard LP при средней мощности излучения (5-50) мВт и массе не более 0,6 кг обеспечивает эффективное блокирование абонентских терминалов стандартных сотовых сетей подвижной связи в радиусе (5-80) м вокруг себя. Поэтому в реальной обстановке, учитывая, что угоны ТС осуществляются, как правило, организованными и технически хорошо оснащенными преступными группами, стандартную сотовую сеть подвижной связи можно рассматривать лишь как вспомогательное средство передачи данных.
Это подтверждается и практическими примерами применения спутниковых-радиопоисковых систем для борьбы с угонами ТС. Один из таких примеров рассмотрен в журнале "Мастер 12 Вольт", август-сентябрь 2004, с.82, 83. В нем рассматривается случай угона автомобиля BMW X5, оснащенного комбинированной спутниковой-радиопоисковой системой "АвтоЛокатор Супер".
Как отмечается в статье, при угоне система сработала, как и положено. От датчиков, установленных в BMW, сигнал тревоги мгновенно ушел в диспетчерский центр. Получив сигнал, операторы диспетчерского центра зафиксировали на экранах мониторов отметку движущегося BMW, взяли ее на сопровождение, получили по сотовой сети подвижной связи точные координаты УТС, измеренные бортовым GPS-приемником, и сообщили их экипажам ТС быстрого реагирования. Началась операция "перехват". Для того, чтобы поймать угонщиков с поличным, экипажи ТС быстрого реагирования попросили диспетчерский центр не блокировать движение BMW. Однако ситуация осложнилась тем, что УТС уже приближалось к МКАД, т.е. выходило из зоны действия специализированной радиопоисковой системы. При этом угонщику удалось с помощью постановщика помехи заглушить GSM-канал и поступление в диспетчерский центр высокоточных координат движущегося BMW прекратилось. В любой момент, как только УТС вышло бы из зоны действия радиопоисковой системы, отметка УТС могла бы вообще исчезнуть с экранов диспетчерского центра. Это означало бы потерю УТС - угонщики укрыли бы BMW в безопасном для себя районе, недоступном для радиопоисковой системы. Тогда было принято решение о блокировании движения УТС по пейджинговому каналу связи, и автомобиль был перехвачен.
Как видно из приведенного примера, только комплексное использование специализированной территориально распределенной радиопоисковой системы и стандартной сотовой сети подвижной связи - для определения местоположения УТС и пейджингового канала – для блокирования движения позволило спасти дорогостоящий автомобиль.
Указанный пример наглядно демонстрирует и недостатки системы-прототипа.
Если бы угонщики заглушили пейджинговый канал связи, дистанционное блокирование движения УТС стало бы невозможным, и УТС вышло бы из зоны действия радиопоисковой системы. Это привело бы к срыву операции "перехват".
Настоящее изобретение направлено на устранение указанного недостатка и на повышение эффективности действий сил и средств быстрого реагирования при проведении операции "перехват".
Предметом настоящего изобретения является способ радиопоиска и перехвата УТС, при котором с помощью охранных извещателей обнаруживают проникновение злоумышленника в охраняемое ТС, излучают с помощью автономного передающего устройства высокочастотный сигнал, а также, с помощью приемопередающего модуля, высокочастотный сигнал, использующий один из стандартов сотовой сети подвижной связи, формируют тревожные извещения и преобразуют их в кодовые сообщения, которыми модулируют указанные высокочастотные сигналы, передают модулированные высокочастотные сигналы, несущие тревожные извещения, в диспетчерский центр, соответственно, по территориально распределенной ретрансляционно-радиопеленгационной сети и по стандартной сотовой сети подвижной связи, формируют в центре управления стандартной сотовой сетью подвижной связи тест-сигналы и передают их по стандартной сотовой сети подвижной связи, принимают на борту охраняемого ТС указанные тест-сигналы, селектируют в диспетчерском центре тревожные извещения и осуществляют их цифровую обработку, посредством которой распознают факт угона и движения УТС по улично-дорожной сети, определяют идентификационные признаки УТС и его текущее местоположение на карте-схеме улично-дорожной сети, после чего формируют и передают ТС быстрого реагирования начальные и текущие внешние целеуказания с данными о местоположении и идентификационных признаках УТС, а в случае необходимости дистанционно блокируют движение УТС, - при этом при передаче тревожных извещений по территориально распределенной ретрансляционно-радиопеленгационной сети контролируют на борту УТС совпадение последовательности двоичных символов в передаваемых и принимаемых по радиоэфиру тревожных извещениях, и при отсутствии указанного совпадения формируют сигнал срыва приема по ретрансляционно-радиопеленгационной сети, а при приеме тест-сигналов, поступающих по стандартной сотовой сети подвижной связи, измеряют средние за заданный интервал времени значения отношения сигнал / помеха, сравнивают их с заданным порогом и при снижении измеренных средних значений отношения сигнал / помеха до заданного порогового уровня и при одновременном наличии сигнала срыва приема по ретрансляционно-радиопеленгационной сети формируют на борту УТС последовательность команд, которыми воздействуют на узлы блокирования движения УТС, вызывая его постепенную остановку, после чего активируют объектовое оконечное устройство, посредством которого излучают сигналы тревоги в разрешенных для устройств охранной сигнализации диапазонах частот и мощностей, пеленгуют с бортов ТС быстрого реагирования сигналы тревоги и используют эти пеленги совместно с текущими внешними целеуказаниями для управления движением ТС быстрого реагирования в процессе перехвата УТС.
Частными существенными признаками изобретения являются следующие.
Автономным передающим устройством излучают высокочастотный сигнал, содержащий несколько номиналов радиочастот, перестраиваемых по псевдослучайному закону.
Излучение объектовым оконечным устройством сигналов тревоги в разрешенных для устройств охранной сигнализации диапазонах частот и мощностей осуществляют на нескольких номиналах радиочастот, перестраиваемых по псевдослучайному закону.
Задачей изобретения является создание технологии радиопоиска и сопровождения УТС, которая позволила бы повысить эффективность действий участников операции "перехват" (экипажей ТС быстрого реагирования и персонала диспетчерского центра) в условиях применения угонщиками средств постановки преднамеренных помех, в частности средств глушения GSM-каналов связи, каналов пейджинговой связи, а также при постановке специальных помех глобальным спутниковым системам радионавигации, делающих невозможным высокоточное измерение координат УТС.
Обеспечиваемый технический результат заключается в комплексном использовании возможностей находящегося на борту УТС охранно-противоугонного оборудования и размещаемой на борту ТС быстрого реагирования радиопоисковой аппаратуры для своевременного обнаружения факта подавления угонщиками каналов связи и обмена данными между УТС и диспетчерским центром, автоматического блокирования движения УТС и перехода к его автономному сопровождению радиопоисковыми установками, установленными на борту ТС быстрого реагирования.
Суть изобретения поясняется на фиг.1-7.
На фиг.1 представлена структурная схема радиопоисковой системы, реализующей заявленный способ.
На фиг.2 представлена структурная схема устройства охранной сигнализации, входящего в состав радиопоисковой системы, показанной на фиг.1.
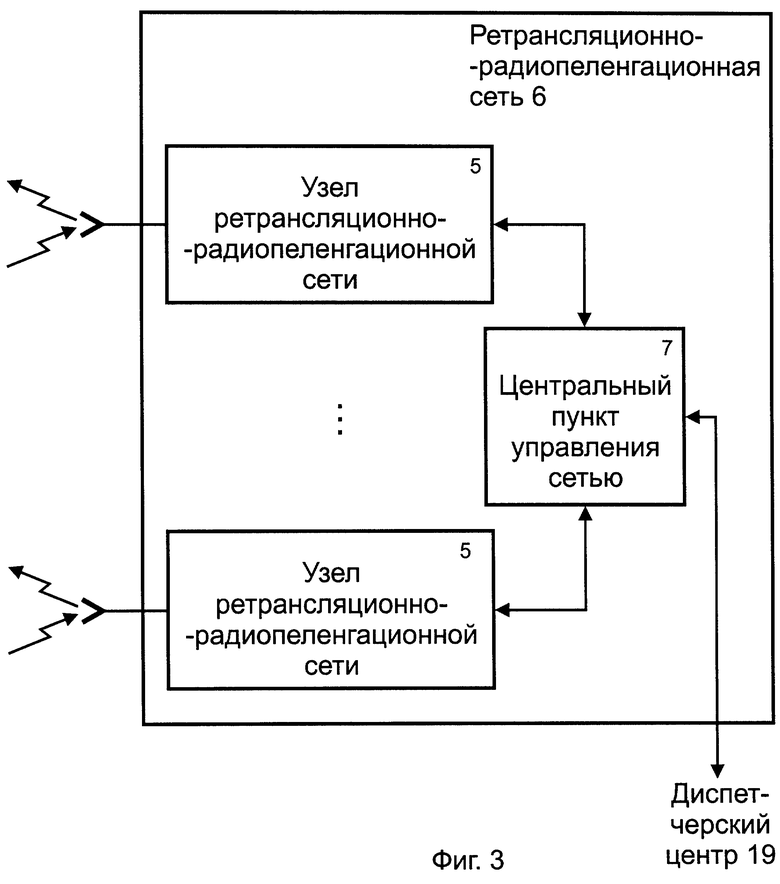
На фиг.3 представлена структурная схема ретрансляционно-радиопеленгационной сети.
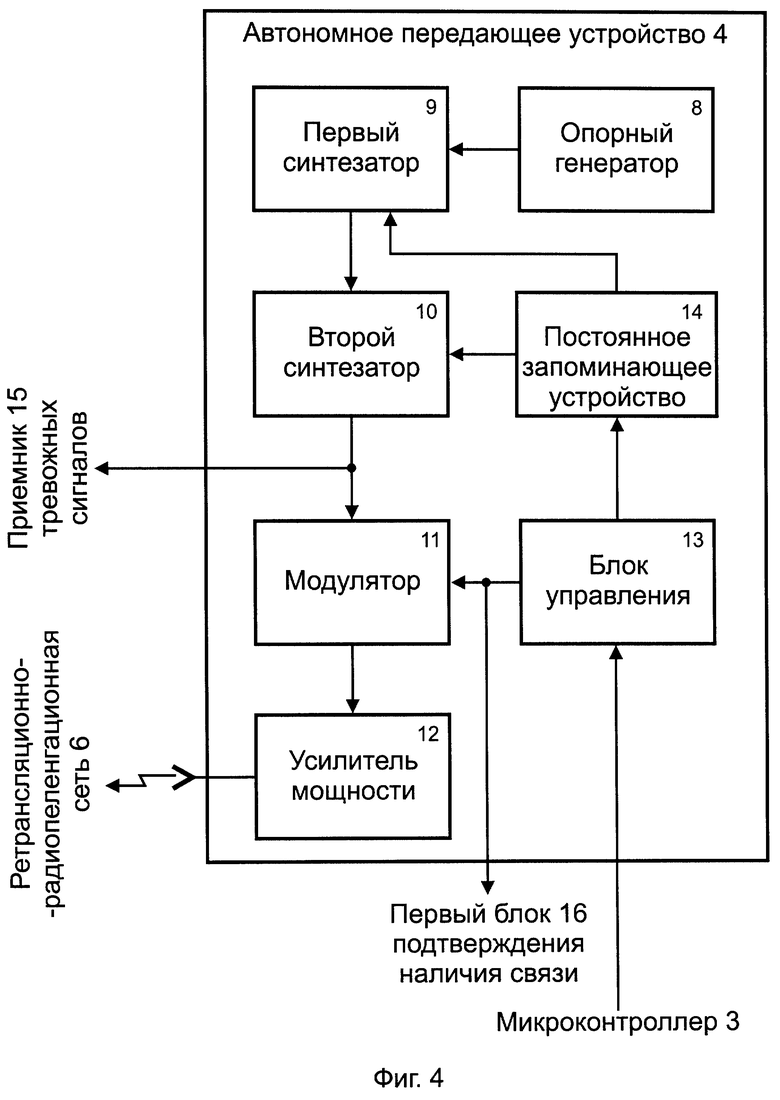
На фиг.4 представлена структурная схема автономного передающего устройства, входящего в состав устройства охранной сигнализации.
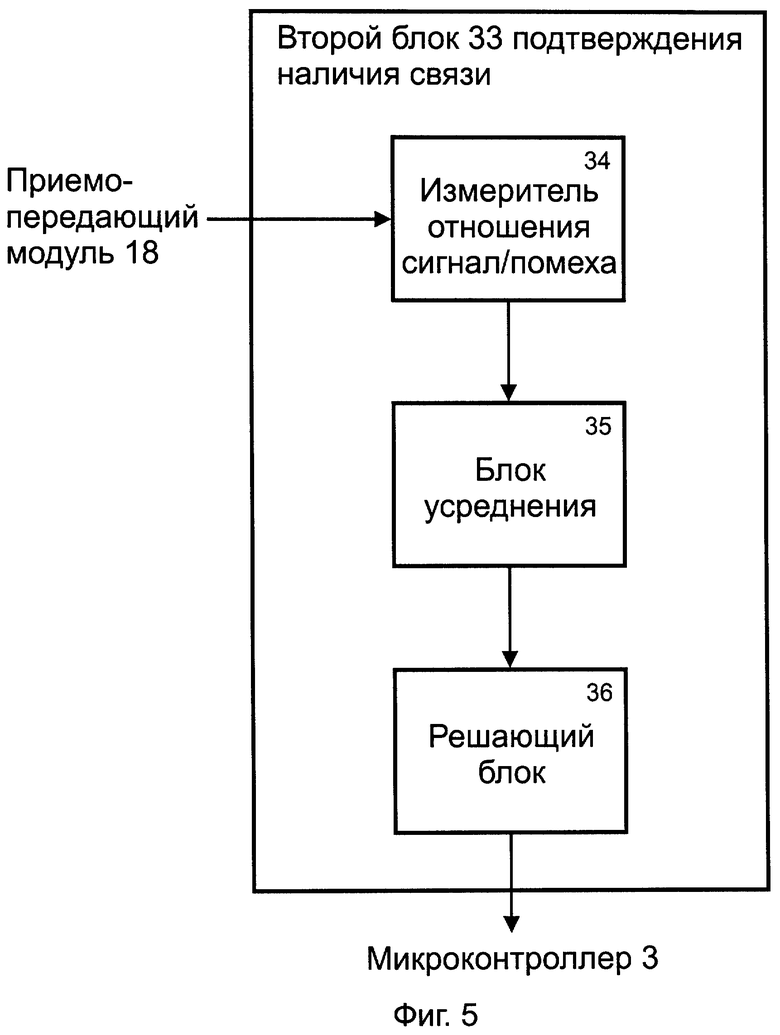
На фиг.5 представлена структурная схема возможного варианта построения второго блока подтверждения наличия связи входящего в состав устройства охранной сигнализации.
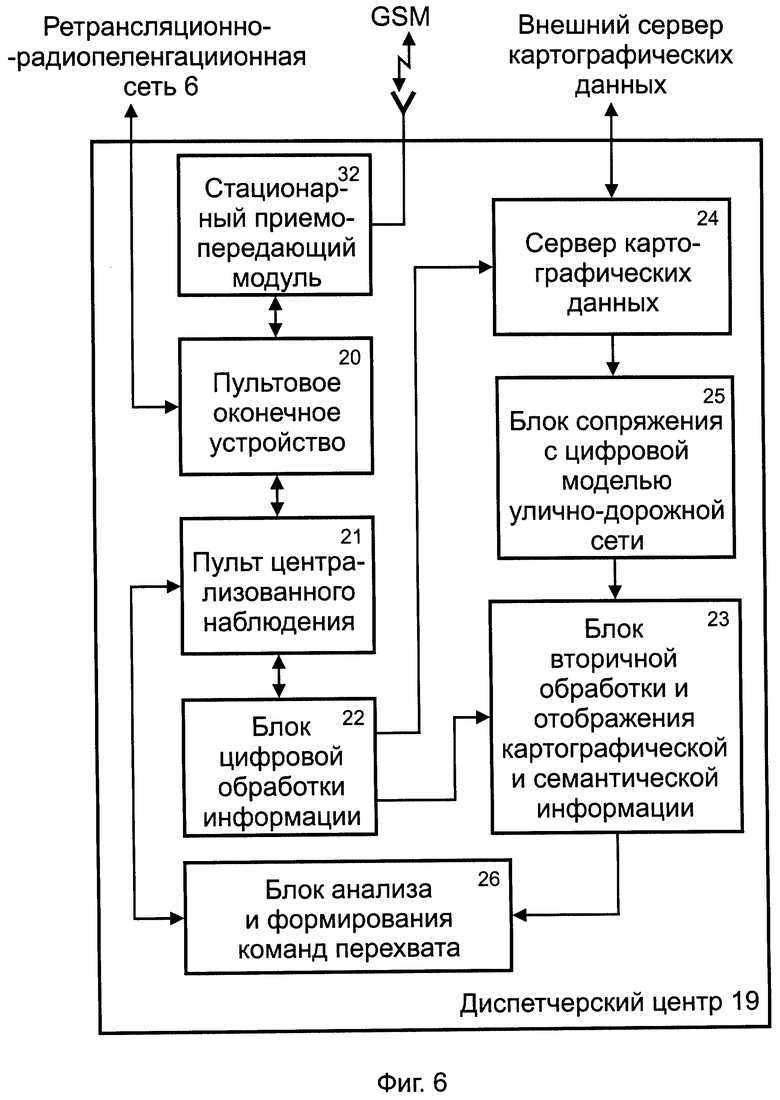
На фиг.6 представлена структурная схема диспетчерского центра.
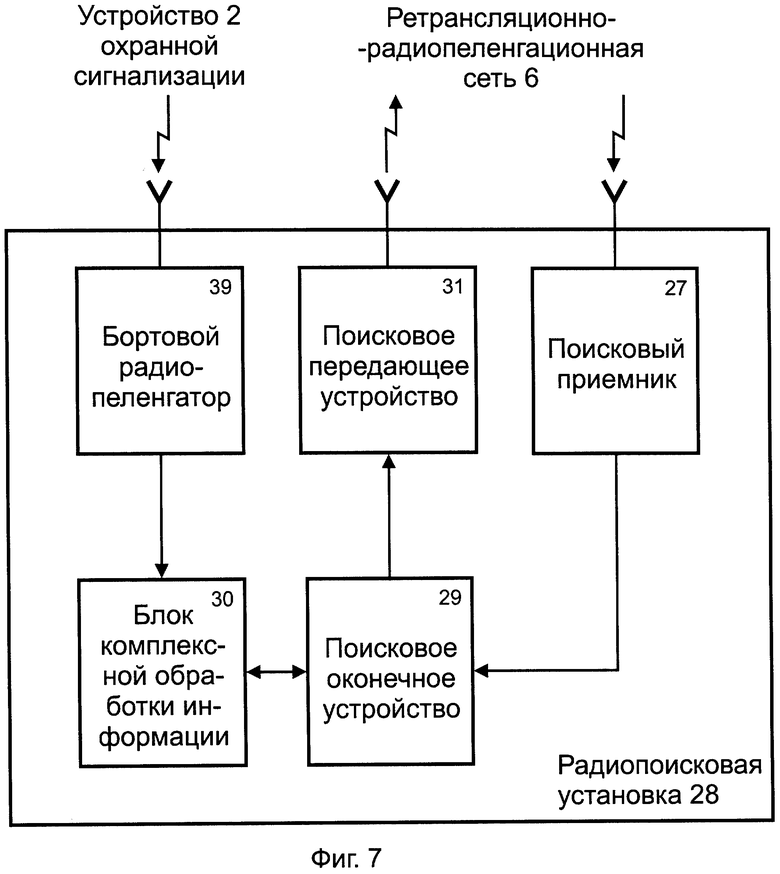
На фиг.7 представлена структурная схема радиопоисковой установки.
На фиг. 1-7 использованы следующие обозначения:
1 - блок охранных извещателей; 2 - устройство охранной сигнализации; 3 - микроконтроллер; 4 - автономное передающее устройство; 5 - узел ретрансляционно-радиопеленгационной сети; 6 - ретрансляционно-радиопеленгационная сеть; 7 - центральный пункт управления сетью; 8 - опорный генератор; 9 - первый синтезатор; 10 - второй синтезатор; 11 - модулятор; 12 - усилитель мощности; 13 - блок управления; 14 - постоянное запоминающее устройство; 15 - приемник тревожных сигналов; 16 - первый блок подтверждения наличия связи; 17 - GPS-приемник; 18 - приемопередающий модуль; 19 - диспетчерский центр; 20 - пультовое оконечное устройство; 21 - пульт централизованного наблюдения (ПЦН); 22 - блок цифровой обработки информации; 23 - блок вторичной обработки и отображения картографической и семантической информации; 24 - сервер картографических данных; 25 - блок сопряжения с цифровой моделью улично-дорожной сети; 26 - блок анализа и формирования команд перехвата; 27 - поисковый приемник; 28 - радиопоисковая установка; 29 - поисковое оконечное устройство; 30 - блок комплексной обработки информации; 31 - поисковое передающее устройство; 32 - стационарный приемопередающий модуль; 33 - второй блок подтверждения наличия связи; 34 - измеритель отношения сигнал / помеха; 35 - блок усреднения; 36 - решающий блок; 37 - дополнительный узел блокирования движения; 38 - объектовое оконечное устройство; 39 - бортовой радиопеленгатор.
Представленная на фиг.1-7 радиопоисковая система (фиг.1) состоит из четырех основных частей: устройства 2 охранной сигнализации, установленного на борту УТС, радиопоисковой установки 28, размещенной на борту ТС быстрого реагирования, специализированной территориально распределенной ретрансляционно-радиопеленгационной сети 6 и диспетчерского центра 19. Радиопоисковая система взаимодействует со стандартной сотовой сетью подвижной связи и с глобальной спутниковой системой радионавигации.
Устройство 2 охранной сигнализации (фиг.2) подключено к расположенным на УТС узлам блокирования движения, выполненным с возможностью воздействия на исполнительные органы, входящие в состав УТС, а также - непосредственно к указанным исполнительным органам. Устройство 2 охранной сигнализации имеет следующие антенные входы / выходы:
- для двухсторонней связи по сотовой сети подвижной связи с диспетчерским центром 19;
- для передачи по ретрансляционно-радиопеленгационной сети 6 высокочастотных сигналов в диспетчерский центр 19;
- для приема сигналов GPS;
- для передачи на радиопоисковые установки 28 высокочастотных сигналов в разрешенном для устройств 2 охранной сигнализации диапазоне частот (433,92 МГц±0,2%) и мощностей (до 10 мВт).
Радиопоисковая установка 28 (фиг.7) имеет следующие антенные входы / выходы:
- для пеленгации высокочастотных сигналов в разрешенном диапазоне частот и мощностей, излучаемых устройством 2 охранной сигнализации;
- для излучения по ретрансляционно-радиопеленгационной сети 6 высокочастотного сигнала, например, в виде последовательностей радиоимпульсов с изменяющейся по псевдослучайному закону несущей частотой - так называемого hopping-сигнала (патент RU №2228275 В 60 R 25/10, G 08 В 25/10, G 08 B 29/16);
- для приема высокочастотного сигнала из ретрансляционно-радиопеленгационной сети 6.
Ретрансляционно-радиопеленгационная сеть 6 (фиг.3) содержит узлы 5 ретрансляционно-радиопеленгационной сети, связанные по радиоэфиру с устройствами 2 охранной сигнализации и с радиопоисковыми установками 28, и центральный пункт 7 управления сетью, связанный по проводам или по радиоэфиру с вышеупомянутыми узлами 5 ретрансляционно-радиопеленгационной сети и с диспетчерским центром 19.
Диспетчерский центр 19 (фиг.6) имеет двухсторонние связи с центральным пунктом 7 управления сетью, входящим в состав специализированной ретрансляционно-радиопеленгационной сети 6, и с внешним сервером картографических данных. При этом диспетчерский центр 19 выполнен с возможностью приема и передачи данных по стандартной сотовой сети подвижной связи.
Установленное на борту УТС устройство 2 охранной сигнализации (фиг.2) содержит блок 1 охранных извещателей, выходы которого подключены ко входам микроконтроллера 3. Объектовое оконечное устройство 38, также входящее в состав устройства 2 охранной сигнализации, выполнено с возможностью приема команд на излучение от микроконтроллера 3 и - после приема такой команды - излучения высокочастотного сигнала (предназначенного для передачи на радиопоисковые установки 28) в разрешенном для устройств 2 охранной сигнализации диапазоне частот (433,92 МГц±0,2%) и мощностей (до 10 мВт). Автономное передающее устройство 4 (фиг.4) выполнено с возможностью приема тревожных извещений от микроконтроллера 3, преобразования этих тревожных извещений в кодовые сообщения, которыми модулируется высокочастотный сигнал, передаваемый по ретрансляционно-радиопеленгационной сети 6. В состав автономного передающего устройства 4 входят последовательно соединенные опорный генератор 8, первый синтезатор 9, второй синтезатор 10, модулятор 11 и усилитель 12 мощности, связанный по радиоэфиру с ретрансляционно-радиопеленгационной сетью 6, а также последовательно соединенные блок 13 управления и постоянное запоминающее устройство 14. Выходы постоянного запоминающего устройства 14 подключены ко вторым входам, соответственно, первого 9 и второго 10 синтезаторов. При этом второй выход блока 13 управления подключен ко второму входу модулятора 11, а вход блока 13 управления является входом данного автономного передающего устройства 4, предназначенным для подключения к соответствующему выходу микроконтроллера 3.
Микроконтроллер 3 связан с приемопередающим модулем 18, выполненным с возможностью приема и передачи кодовых сообщений по стандартной сотовой сети подвижной связи. Один из входов микроконтроллера 3 подключен к выходу GPS-приемника 17, обеспечивающего прием и обработку сигналов глобальных спутниковых систем радионавигации (НАВСТАР и ГЛОНАСС). Один из выходов микроконтроллера 3 подключен к узлам блокирования движения, а другой выход микроконтроллера 3 подключен к дополнительному узлу 37 блокирования движения, размещенному в устройстве 2 охранной сигнализации и выполненному с возможностью воздействия на исполнительные органы УТС, влияющие на его движение (двигатель, систему зажигания и др.). В качестве узлов блокирования движения могут использоваться штатный иммобилайзер и / или дистанционно управляемые реле, например реле типа HOOK-UP или WAIT UP, входящие в состав охранно-противоутонных комплексов, серийно выпускаемых предприятием-заявителем (см. Каталог "Автомобильные охранные системы", Москва, "Альтоника", 2003, с.28, 29). Один из входов микроконтроллера 3 подключен к выходу первого блока 16 подтверждения наличия связи, входы которого подключены, соответственно, к выходу приемника 15 тревожных сигналов и к выходу блока 13 управления, входящего в состав автономного передающего устройства 4. Другой вход микроконтроллера 3 подключен к выходу второго блока 33 подтверждения наличия связи.
Первый блок 16 подтверждения наличия связи представляет собой последовательную поразрядную схему сравнения двух кодов. Его выходной сигнал зависит от того, совпадают или не совпадают сравниваемые многоразрядные коды.
Возможный вариант построения второго блока 33 подтверждения наличия связи показан на фиг.5. Вход второго блока 33 подтверждения наличия связи подключен к выходу приемопередающего модуля 18. В состав второго блока 33 подтверждения наличия связи входит цепочка "измеритель 34 отношения сигнал / помеха - блок 35 усреднения - решающий блок 36". Вход измерителя 34 отношения сигнал / помеха является входом второго блока 33 подтверждения наличия связи, выходом которого служит выход решающего блока 36. Второй блок 33 подтверждения наличия связи выполнен с возможностью обнаружения (в соответствии с заданным критерием) факта потери связи УТС со стандартной сотовой сетью подвижной связи и формирования - после этого обнаружения - соответствующего управляющего сигнала на микроконтроллер 3.
Узлы 5 ретрансляционно-радиопеленгационной сети предназначены:
- для приема кодовых сообщений, излучаемых автономным передающим устройством 4 с борта охраняемого ТС (с борта УТС);
- для приема кодовых сообщений, излучаемых поисковыми передающими устройствами 31, входящими в состав радиопоисковых установок 28 (с борта ТС быстрого реагирования);
- для селекции принятых кодовых сообщений (с борта охраняемого ТС, с борта УТС или с борта ТС быстрого реагирования) и ретрансляции этих сообщений в центральный пункт 7 управления сетью;
- для приема из центрального пункта 7 управления сетью начальных внешних целеуказаний, а также текущих внешних целеуказаний;
- для ретрансляции принятых из центрального пункта 7 управления сетью начальных внешних целеуказаний и текущих внешних целеуказаний в поисковый приемник 27, входящий в состав радиопоисковой установки 28.
Связь узлов 5 ретрансляционно-радиопеленгационной сети с центральным пунктом 7 управления сетью может быть как проводной (например, по оптоволоконным кабелям), так и беспроводной (например, по радиоэфиру).
При этом центральный пункт 7 управления сетью предназначен:
- для приема информации от узлов 5 ретрансляционно-радиопеленгационной сети;
- для идентификации контролируемого УТС;
- для определения пеленгов УТС относительно узлов 5 ретрансляционно-радиопеленгационной сети;
- для формирования кодовых сообщений, содержащих информацию об идентификационных признаках контролируемого УТС, пеленгах источника излучения и о географических координатах узлов 5 ретрансляционно-радиопеленгационной сети, ретранслировавших исходное тревожное извещение;
- для передачи указанных кодовых сообщений в диспетчерский центр 19.
Радиопоисковая установка 28, устанавливаемая на борту ТС быстрого реагирования (фиг.7), включает в себя:
- последовательно соединенные поисковый приемник 27, поисковое оконечное устройство 29 и поисковое передающее устройство 31, обеспечивающие возможность пеленгации ТС быстрого реагирования с помощью ретрансляционно-радиопеленгационной сети 6, а также возможность передачи этих данных по ретрансляционно-радиопеленгационной сети 6 в диспетчерский центр 19;
- блок 30 комплексной обработки информации, связанный с поисковым оконечным устройством 29 и подключенный к бортовому радиопеленгатору 39;
- бортовой радиопеленгатор 39, обеспечивающий определение местоположения ТС быстрого реагирования относительно УТС, являющегося объектом перехвата.
В состав радиопоисковой установки 28 может быть включен и блок навигационных измерений, например GPS-приемник, обеспечивающий автономное определение текущего местоположения ТС быстрого реагирования в географической системе координат.
Поисковый приемник 27 предназначен:
- для приема по радиоэфиру начальных внешних целеуказаний и текущих внешних целеуказаний, формируемых в диспетчерском центре 19 и транслируемых узлами 5 ретрансляционно-радиопеленгационной сети;
- для передачи принятых начальных внешних целеуказаний и текущих внешних целеуказаний через поисковое оконечное устройство 29 в блок 30 комплексной обработки информации.
Поисковое оконечное устройство 29 выполнено аналогично устройствам оконечным, используемым в стационарных устройствах охранной сигнализации (см., например, "Справочник инженерно-технических работников и электромонтеров технических средств охранно-пожарной сигнализации", Москва, МВД, ГУВО, 1997, с.10).
Поисковое передающее устройство 31 аналогично автономному передающему устройству 4.
Бортовой радиопеленгатор 39 предназначен для определения относительных координат (дальности и угла направления) УТС, на котором установлено объектовое оконечное устройство 38, излучающее сигнал тревоги в разрешенных для устройств охранной сигнализации диапазонах частот (433,92 МГц±0,2%) и мощностей излучения (до 10 мВт). Как отмечалось выше, это может быть hopping-сигнал.
Центральный пункт 7 управления сетью связан (по радиоэфиру или по проводам) с пультовым оконечным устройством 20, входящим в состав оборудования диспетчерского центра 19 (фиг.6). Пультовое оконечное устройство 20 связано с ПЦН 21, который, в свою очередь, связан с блоком 26 анализа и формирования команд перехвата и с блоком 22 цифровой обработки информации.
Вход блока 26 анализа и формирования команд перехвата подключен к выходу блока 23 вторичной обработки и отображения картографической и семантической информации.
Выходы блока 22 цифровой обработки информации подключены, соответственно, к первому входу блока 23 вторичной обработки и отображения картографической и семантической информации и ко входу сервера 24 картографических данных, выход которого через блок 25 сопряжения с цифровой моделью улично-дорожной сети подключен ко второму входу блока 23 вторичной обработки и отображения картографической и семантической информации. При этом сервер 24 картографических данных связан (например, с помощью оптоэлектронного кабеля) с внешним сервером картографических данных.
В состав диспетчерского центра 19 входит также стационарный приемопередающий модуль 32, связанный с пультовым оконечным устройством 20.
Блок 22 цифровой обработки информации представляет собой микропроцессорный узел, предназначенный для селекции различных видов информации (идентификационных признаков, параметров движения УТС, текущего местоположения УТС и др.). Блок 22 цифровой обработки информации выполнен с возможностью преобразования этой информации в вид, необходимый для ее обработки в блоке 23 вторичной обработки и отображения картографической и семантической информации.
Блок 23 вторичной обработки и отображения картографической и семантической информации предназначен для создания, ведения и поддержания пространственного банка данных об охраняемых ТС (которые могут превратиться в УТС) и о ТС быстрого реагирования. Составными частями этого банка являются векторная, семантическая и растровая базы данных. На сервере 24 картографических данных хранится банк цифровых моделей местности, например участков улично-дорожной сети. Вход сервера 24 картографических данных, подключенный ко второму выходу блока 22 цифровой обработки информации, предназначен для ввода в сервер 24 картографических данных запросов на выборку из него определенных участков цифровой модели местности, соответствующих текущим координатам УТС и ТС быстрого реагирования. Банк цифровых моделей местности формируется с помощью внешнего сервера картографических данных и периодически (с периодом в несколько месяцев) обновляется по соответствующему запросу, поступающему от сервера 24 картографических данных. Блок 25 сопряжения с цифровой моделью улично-дорожной сети представляет собой цифровой конвертор баз данных и предназначен для согласования формата, используемого в блоке 23 вторичной обработки и отображения картографической и семантической информации, с форматом картографических данных, хранящихся на сервере 24 картографических данных.
Блок 1 охранных извещателей, входящий в состав устройства 2 охранной сигнализации, представляет собой типовое техническое средство охранной сигнализации, предназначенное для обнаружения несанкционированного проникновения на охраняемый объект. Роль охранных извещателей могут играть датчики охранной сигнализации (датчик объема, концевые выключатели и др.), а также любые контрольно-измерительные приборы, позволяющие определять состояния охраняемых объектов и изменения этих состояний (см., например, "Справочник инженерно-технических работников и электромонтеров технических средств охранно-пожарной сигнализации", Москва, МВД, ГУВО, 1997).
Объектовое оконечное устройство 38 может быть создано, к примеру, на базе малогабаритного программируемого передатчика автомобильного радиопейджера "РИФ ПЕЙДЖ-100/101" (модели RP-100/101) с измененным (программным путем) форматом излучаемого сигнала. При передаче сигналов тревоги используется ЧМ-сигнал с рабочей частотой в разрешенной для гражданского применения полосе 433,92 МГц±0,2% с кварцевой стабилизацией частоты. Средний радиус действия объектового оконечного устройства 38 на базе вышеупомянутых моделей RP-100 /101 составляет примерно 500 м при допустимой мощности излучения 10 мВт. В варианте с использованием hopping-сигнала (передатчик "РИФ СТРИНГ RS-202TP") дальность действия объектового оконечного устройства 38 увеличивается до (5-10) км. Одновременно резко возрастает помехоустойчивость передачи данных.
В качестве автономных передающих устройств 4, узлов 5 ретрансляционно-радиопеленгационной сети и центрального пункта 7 управления сетью могут быть использованы соответствующие узлы действующей радиоохранной системы, информация о которой представлена в Интернете на сайте предприятия-разработчика (www.arkan.spb.ru). Информация об этих составных частях рассматриваемой радиопоисковой системы приведена также в описаниях патентов RU №2216463, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2220859, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00; RU №2228860, В 60 R 25/00, G 08 C 25/10.
Для передачи извещений в рассматриваемой радиопоисковой системе, наряду с ретрансляционно-радиопеленгационной сетью 6, используется стандартная сеть сотовой подвижной связи, например стандарта GSM, терминалами которой являются установленный на УТС приемопередающий модуль 18 и расположенный в диспетчерском центре 19 стационарный приемопередающий модуль 32. Формат данных, передаваемых объектовым оконечным устройством 38 и автономным передающим устройством 4, задается программным путем. В качестве приемопередающего модуля 18 и стационарного приемопередающего модуля 32 могут быть применены, например, модификации GSM-модуля ТС35 Terminal компании Siemens. Для взаимодействия с другими устройствами в них использован стандартный интерфейс RS-232, что позволяет подключать их к различным типам компьютерных терминалов, используемых в системах охранной сигнализации. Приемопередающий модуль 18 обладает, кроме того, дополнительным выходом, используемым для подключения ко входу второго блока 33 подтверждения наличия связи.
Бортовые радиопеленгаторы 39, которые могут быть использованы в радиопоисковых установках 28, серийно выпускаются фирмой-заявителем под торговой маркой "РИФ ФАЙНДЕР-800" (сертификат соответствия №РОСС.Ки.МЕ30.В00721). "РИФ ФАЙНДЕР-800" предназначен для установки на ТС и служит для определения относительных координат (дальности и угла направления) другого ТС (движущегося или неподвижного), на котором установлено объектовое оконечное устройство 38, работающее в разрешенных диапазонах частот (433,92 МГц±0,2%) и мощностей излучения (до 10 мВт). Модификация "РИФ ФАЙНДЕР-800" может использоваться для радиопеленгации hopping-сигналов, излучаемых передатчиком "РИФ СТРИНГ RS-202TP" (сертификат соответствия №POCC.RU.ME96.H00513).
В качестве ПЦН 21, входящего в состав диспетчерского центра 19, могут быть использованы серийно выпускаемые ПЦН ("RS-200P" или "RS-202P"), предназначенные для применения в системах централизованной радиоохраны объектов недвижимости (торговых павильонов, складов, гаражей, дач и т.п.). Указанные модели ПЦН имеют цифровой процессор, текстовый жидкокристаллический индикатор на две строки по шестнадцать символов в каждой, реле для управления различными внешними тревожными устройствами, а также стандартный выход для подключения различных модулей расширения (дополнительных блоков обработки и отображения информации, принтера и др.). Все события заносятся в электронный протокол энергонезависимой памяти "RS-200P" ("RS-202P") и могут быть просмотрены и / или выведены на печать.
В полномасштабном варианте реализации диспетчерского центра 19 в качестве блока 23 вторичной обработки и отображения картографической и семантической информации может быть использован программно-аппаратный комплекс "Геобилдер®", серийно выпускаемый и поставляемый фирмой ПК "Геокибернетика" (сертификат соответствия №РОСС RU. KP02. С00014).
Программно-аппаратный комплекс "Геобилдер" представляет собой автоматизированное рабочее место оператора с развитым программным обеспечением, реализующим технологию географической информационной системы (ГИС-технологию). Описание и принципы функционирования программно-аппаратного комплекса "Геобилдер" представлены в фирменном материале "Комплекс программных средств GeoBuilder", 2002 и на сайте предприятия-производителя www. geobuilder.ru. Возможны и упрощенные варианты построения блока 23 вторичной обработки и отображения картографической и семантической информации, при которых возможности комплекса "Геобилдер" используются частично. Блок 26 анализа и формирования команд перехвата также представляет собой разновидность автоматизированного рабочего места оператора. Различные варианты построения этого блока представлены, например, в патентной заявке US №2002/0103622, G 06 F 15/00.
Другие блоки и узлы, используемые в радиопоисковой системе, реализующей рассматриваемый способ, представляют собой стандартные изделия электронно-вычислительной техники, применяемые в серийно выпускаемых радиоэлектронных средствах.
В соответствии с вышеизложенным возможность практической реализации заявленного способа не вызывает сомнений.
Рассматриваемый вариант радиопоисковой системы (фиг.1), реализующей предлагаемый способ радиопоиска и перехвата УТС, работает следующим образом.
Активация излучения высокочастотных сигналов, несущих тревожные извещения с борта охраняемого ТС, производится в автоматическом режиме при срабатывании какого-либо датчика в блоке 1 охранных извещателей, входящем в состав устройства 2 охранной сигнализации (фиг.2). При срабатывании каждого датчика блок 1 охранных извещателей формирует соответствующее тревожное извещение о попытке угона. Тревожное извещение, формируемое блоком 1 охранных извещателей, поступает в микроконтроллер 3. Микроконтроллер 3 включает автономное передающее устройство 4 для передачи тревожного извещения о попытке угона (то есть о срабатывании соответствующего охранного извещателя в блоке 1 охранных извещателей). Кроме того, микроконтроллер 3 воздействует на узлы блокирования движения охраняемого ТС. В случае попытки угона эти узлы блокирования движения препятствуют движению охраняемого ТС, например, путем нарушения работы системы зажигания, прерывания подачи топлива и т.п. Однако любая система защиты не может быть идеальной. Предположим, что злоумышленникам удалось обойти узлы блокирования движения, и угон охраняемого ТС произошел (начиная с этого момента, охраняемое ТС рассматривается в качестве УТС). В этом случае блок 1 охранных извещателей формирует и подает в микроконтроллер 3 сигнал наличия движения УТС, по которому микроконтроллер 3 формирует и подает в автономное передающее устройство 4 команду начала излучения в эфир высокочастотного сигнала, несущего тревожное извещение об угоне ТС.
Излученный автономным передающим устройством 4 высокочастотный сигнал (либо тревожное извещение о попытке угона, либо тревожное извещение об угоне ТС) принимается одним или несколькими узлами 5 ретрансляционно-радиопеленгационной сети, входящими в состав ретрансляционно-радиопеленгационной сети 6. При обнаружении узлами 5 ретрансляционно-радиопеленгационной сети излучения автономного передающего устройства 4 в указанных узлах автоматически измеряются энергетические и частотные параметры принятых сигналов и фиксируются моменты приема излучений. Результаты указанных измерений передаются в центральный пункт 7 управления сетью. Центральный пункт 7 управления сетью осуществляет идентификацию охраняемого ТС (или УТС) и определение пеленгов УТС относительно узлов 5 ретрансляционно-радиопеленгационной сети.
При передаче либо тревожного извещения о попытке угона, либо тревожного извещения об угоне ТС автономное передающее устройство 4 излучает последовательности радиоимпульсов на высокочастотной несущей с изменяемой по псевдослучайному закону частотой - hopping-сигнал. При формировании указанных последовательностей радиоимпульсов используется известная схема (фиг.4), включающая в себя цепь: "опорный генератор 8 - первый синтезатор 9 - второй синтезатор 10 - модулятор 11 - усилитель 12 мощности", и управляющую цепочку, состоящую из последовательно включенных блока 13 управления и постоянного запоминающего устройства 14. Управляющие воздействия, необходимые для подачи автономным передающим устройством 4 соответствующего тревожного извещения, формируются микроконтроллером 3 по сигналам, поступающим из блока 1 охранных извещателей, и подаются на вход блока 13 управления, являющимся входом всего автономного передающего устройства 4. В блоке 13 управления, в зависимости от этих управляющих воздействий, выделяются определенные адреса ячеек постоянного запоминающего устройства 14, в которых хранятся коды выделенных номиналов частот. Сигналы с соответствующих выходов постоянного запоминающего устройства 14 управляют работой первого 9 и второго 10 синтезаторов. При этом блок 13 управления одновременно управляет и модулятором 11. В результате на вход усилителя 12 мощности поступает сигнал с изменяемой по псевдослучайному закону несущей частотой, модулированной кодовыми последовательностями импульсов, несущими информацию об идентификационных признаках охраняемого ТС (или УТС). Этот сигнал после усиления в усилителе 12 мощности излучается в эфир.
На борту охраняемого ТС (УТС) осуществляется контроль прохождения радиосигнала автономного передающего устройства 4. Для этого выходной сигнал второго синтезатора 10, определяющий несущую частоту радиосигнала, передается на приемник 15 тревожных сигналов. На этой частоте приемник 15 тревожных сигналов принимает радиосигнал автономного передающего устройства 4 (соответствующим образом ослабленный, например, путем механического окружения приемника 15 тревожных сигналов экраном, подключенным к массе ТС). Таким образом, на выходе приемника 15 тревожных сигналов формируется полученный по радиоэфиру код тревожного извещения о попытке угона или код тревожного извещения об угоне ТС. Этот код сравнивается в первом блоке 16 подтверждения наличия связи с тем же кодом, но полученным на выходе блока 13 управления. Первый блок 16 подтверждения наличия связи поразрядно сравнивает оба кода. Различия в этих кодах могут объясняться только тем, что угонщик либо подавил прием выходных сигналов автономного передающего устройства 4 (например, путем включения генератора помехи), либо механически нарушил целостность автономного передающего устройства 4, каким-либо способом выведя его из строя. Таким образом, наличие различий в кодах, выявляемое первым блоком 16 подтверждения наличия связи, означает, что тревожные извещения не могут быть безошибочно приняты по ретрансляционно-радиопеленгационной сети 6 в центральном пункте 7 управления сетью.
То есть первый блок 16 подтверждения наличия связи контролирует правильность передачи извещений по ретрансляционно-радиопеленгационной сети 6, обнаруживает преднамеренное прерывание угонщиком этого вида связи и формирует на своем выходе служебный сигнал наличия / отсутствия связи. С выхода первого блока 16 подтверждения наличия связи служебный сигнал наличия / отсутствия связи поступает для анализа на микроконтроллер 3.
Кроме тревожных извещений о попытке угона и тревожных извещений об угоне ТС, автономное передающее устройство 4 может излучать еще и "координатные сообщения".
Эти сигналы дополняют тревожные извещения об угоне ТС и позволяют повысить точность определения местоположения УТС. Для формирования координатных сообщений на борту УТС необходимо установить GPS-приемник 17, который должен находиться в зоне уверенного приема сигналов глобальной спутниковой радионавигационной системы. При выполнении этого условия сигналы глобальной спутниковой радионавигационной системы, принятые GPS-приемником 17, поступают в микроконтроллер 3. Микроконтроллер 3 формирует из них координатные сообщения и дополняет этими сообщениями передаваемые через автономное передающее устройство 4 тревожные извещения об угоне ТС. Таким образом, тревожные извещения об угоне ТС, дополненные координатными сообщениями, передаются по ретрансляционно-радиопеленгационной сети 6. Кроме пересылки в автономное передающее устройство 4 микроконтроллер 3 осуществляет пересылку тревожных извещений об угоне ТС, дополненных координатными сообщениями, в приемопередающий модуль 18 для обеспечения их передачи по стандартной сотовой сети подвижной связи.
Необходимо, однако, заметить, что в городских условиях нахождение GPS-приемника 17 в зоне уверенного приема сигналов глобальной спутниковой радионавигационной системы трудновыполнимо. Во-первых, на прохождение спутниковых сигналов влияет затенение, особенно в районах высотной застройки. Во-вторых, как показал опыт локальных войн (в Сербии, на Ближнем Востоке), GPS-приемники весьма уязвимы по отношению к преднамеренным помехам. Так, например, в статье "Теория и практика падающих томагавков", опубликованной в журнале "КОМПЬЮТЕРРА", 2000, №34 (www.computerra.ru), отмечается, что имеется масса примеров сбоев систем наведения крылатых ракет, использовавших GPS-приемники. Идея глушения GPS-приемников была опубликована в журнале "Радиотехника" еще в 1992 г. В 1997 г. фирма "Авиаконверсия" продемонстрировала свои постановщики помех GPS-приемникам на авиасалоне в г. Жуковском. Следующая модификация указанного постановщика помех была показана там же в 1999 г. Эти передатчики срывали работу навигационных приемников во всех четырех диапазонах частот обеих существующих глобальных спутниковых систем радионавигации (НАВСТАР и ГЛОНАСС). При мощности излучения 2 Вт в каждом частотном диапазоне дальность действия постановщика помех с массой менее 3 кг составляла 50 км.
Итак, рассмотрены три вида сигналов, формируемых автономным передающим устройством 4 и передаваемых по ретрансляционно-радиопеленгационной сети 6 в центральный пункт 7 управления сетью:
- тревожные извещения о попытке угона;
- тревожные извещения об угоне ТС;
- координатные сообщения.
В материалах настоящего патента не рассматривается реакция центрального пункта 7 управления сетью на получение тревожного извещения о попытке угона, поскольку указанная реакция выходит за рамки тематики патента, относящегося только к радиопоиску и перехвату УТС.
Каждое тревожное извещение об угоне ТС, дополняемое в ряде случаев координатными сообщениями, передается из центрального пункта 7 управления сетью - по каналам проводной связи или по радиоэфиру - в диспетчерский центр 19 (фиг.6), где принимается пультовым оконечным устройством 20. Далее сигнал тревожного извещения поступает в ПЦН 21 и далее передается в блок 22 цифровой обработки информации, где подвергается необходимой обработке.
Если тревожное извещение не дополнено координатным сообщением, то в блоке 22 цифровой обработки информации по содержащимся в тревожном извещении об угоне ТС пеленгам источника излучения и соответствующим географическим координатам узлов 5 ретрансляционно-радиопеленгационной сети рассчитываются текущие "грубые" координаты УТС. Если же тревожное извещение дополнено координатным сообщением, то для расчета текущих "грубых" координат УТС используются данные из координатного сообщения. При этом необходимо отметить, что на практике, в городских условиях, в связи с эффектом экранирования, дифракцией радиоволн и т.п. предельно возможная точность определения местоположения УТС, не имеющего на борту GPS-приемника 17 (только с помощью ретрансляционно-радиопеленгационной сети 6) составляет в лучшем случае (150-200) м.
Используя рассчитанные текущие "грубые" координаты УТС, блок 22 цифровой обработки информации формирует кодовое сообщение, несущее необходимые данные для поиска и сопровождения данного УТС. Указанное кодовое сообщение подается на первый вход блока 23 вторичной обработки и отображения картографической и семантической информации.
Одновременно в блоке 22 цифровой обработки информации формируется запрос на вызов из сервера 24 картографических данных участка цифровой модели улично-дорожной сети, соответствующего текущим "грубым" координатам УТС. Необходимый набор таких участков цифровой модели улично-дорожной сети предварительно записывается в сервер 24 картографических данных из внешнего сервера картографических данных (по соответствующему запросу сервера 24 картографических данных). Вызванная из сервера 24 картографических данных информация преобразуется в требуемый формат в блоке 25 сопряжения с цифровой моделью улично-дорожной сети и поступает на второй вход блока 23 вторичной обработки и отображения картографической и семантической информации.
В блоке 23 вторичной обработки и отображения картографической и семантической информации данные, поступившие на его первый и второй входы, обрабатываются и отображаются в соответствии с используемой ГИС-технологией. Результатом обработки является наглядное представление на экране монитора, входящего в состав блока 23 вторичной обработки и отображения картографической и семантической информации, отметки контролируемого УТС на фоне карты-схемы улично-дорожной сети обслуживаемого района в сопровождении текстовой информации. В этой текстовой информации может быть, например, указан: цвет, государственный номер и марка УТС, его географические координаты, данные о владельце и т.п. Период обновления отметки контролируемого УТС определяется условиями устойчивого сопровождения контролируемого УТС на улично-дорожной сети. Одновременно могут сопровождаться несколько УТС.
Однако для обеспечения успешного радиопоиска и перехвата УТС средствами быстрого реагирования необходимо также проведение сопровождения и управления ТС быстрого реагирования. Это сопровождение и управление осуществляются следующим образом.
После взятия УТС на сопровождение и подтверждения того, что данное ТС действительно находится в угоне (например, после получения соответствующего заявления владельца УТС), оператор диспетчерского центра 19 (фиг.6) передает данные о текущем местоположении УТС и сопровождающую эти данные текстовую информацию (начальное внешнее целеуказание) из блока 23 вторичной обработки и отображения картографической и семантической информации в блок 26 анализа и формирования команд перехвата. Далее это начальное внешнее целеуказание через ПЦН 21 поступает в пультовое оконечное устройство 20 и из него - по каналам проводной связи или по радиоэфиру - на центральный пункт 7 управления сетью, который передает начальное внешнее целеуказание на узлы 5 ретрансляционно-радиопеленгационной сети. Через эти узлы 5 ретрансляционно-радиопеленгационной сети начальное внешнее целеуказание транслируется по радиоэфиру и принимается на борту ТС быстрого реагирования поисковыми приемниками 27 радиопоисковых установок 28 (фиг.7). Из поискового приемника 27 начальное внешнее целеуказание поступает в поисковое оконечное устройство 29 и из него - в блок 30 комплексной обработки информации, работающий под управлением одного из членов экипажа ТС быстрого реагирования - оператора радиопоисковой установки 28.
Проанализировав начальное внешнее целеуказание по монитору блока 30 комплексной обработки информации, оператор радиопоисковой установки 28 подает через блок 30 комплексной обработки информации (работающий под его управлением) команду в поисковое оконечное устройство 29. По этой команде поисковое оконечное устройство 29 включает поисковое передающее устройство 31.
Формирование и передача начального внешнего целеуказания возможны и при вызванном действиями угонщика нарушении связи УТС с ретрансляционно-радиопеленгационной сетью 6 (связь ТС быстрого реагирования с ретрансляционно-радиопеленгационной сетью 6 при этом не должна нарушаться). Как указывалось выше, передача тревожных извещений об угоне ТС, дополненных координатными сообщениями, проводимая автономным передающим устройством 4 (по ретрансляционно-радиопеленгационной сети 6), сопровождается передачей аналогичных извещений, проводимой приемопередающим модулем 18 (по стандартной сотовой сети подвижной связи). То есть тревожные извещения об угоне ТС, дополненные координатными сообщениями, могут быть приняты непосредственно в стационарном приемопередающем модуле 32, входящем в состав диспетчерского центра 19 (фиг.6). Из стационарного приемопередающего модуля 32 указанные тревожные извещения поступают в пультовое оконечное устройство 20. Эти сигналы полностью аналогичны сигналам, передаваемым в пультовое оконечное устройство 20 по ретрансляционно-радиопеленгационной сети 6. Таким образом, дальнейшая работа диспетчерского центра 19, а затем и радиопоисковой установки 28 будет полностью повторять рассмотренную выше (вплоть до момента включения поискового передающего устройства 31).
Так же, как и автономное передающее устройство 4, входящее в состав устройства 2 охранной сигнализации, поисковое передающее устройство 31 обеспечивает излучение извещений, представляющих собой помехозащищенные последовательности радиоимпульсов на изменяющейся по псевдослучайному закону несущей частоте - hopping-сигналов. В данном случае эти извещения несут информацию об идентификационных признаках ТС быстрого реагирования (государственный номер, состав экипажа и т.п.), участвующего в перехвате данного УТС. Указанные извещения по ретрансляционно-радиопеленгационной сети 6 поступают на вход пультового оконечного устройства 20 диспетчерского центра 19 и, далее, обрабатываются таким же образом, как и тревожные извещения, принимаемые с борта УТС. В результате оператор диспетчерского центра 19 получает возможность наблюдать на экране монитора блока 23 вторичной обработки и отображения картографической и семантической информации перемещающиеся друг относительно друга (на фоне карты-схемы улично-дорожной сети) отметку УТС и отметки ТС быстрого реагирования. Координаты указанных отметок передаются оператором в блок 26 анализа и формирования команд перехвата, в котором рассчитываются и оптимизируются маршруты перехвата и формируются соответствующие текущие внешние целеуказания, передаваемые в ПЦН 21.
В ПЦН 21 текущие внешние целеуказания преобразуются в извещения и через пультовое оконечное устройство 20 передаются в центральный пункт 7 управления сетью. Далее текущие внешние целеуказания через узлы 5 ретрансляционно-радиопеленгационной сети, входящие в состав ретрансляционно-радиопеленгационной сети 6, передаются на радиопоисковые установки 28, установленные на борту ТС быстрого реагирования, участвующих в перехвате данного УТС.
Принятые на борту ТС быстрого реагирования поисковым приемником 27 извещения, содержащие текущие внешние целеуказания, передаются в поисковое оконечное устройство 29. В поисковом оконечном устройстве 29 из указанных извещений выделяется составляющая, несущая информацию об идентификационных признаках контролируемого УТС и его местоположении относительно ТС быстрого реагирования (информационная составляющая), которая передается в блок 30 комплексной обработки информации. Одновременно в поисковом оконечном устройстве 29 формируется служебный сигнал подтверждения приема текущего внешнего целеуказания, который через поисковое передающее устройство 31 излучается в эфир. Сигнал подтверждения приема текущего внешнего целеуказания принимается узлами 5 ретрансляционно-радиопеленгационной сети и передается в центральный пункт 7 управления сетью. При неполучении сигналов подтверждения приема текущего внешнего целеуказания центральный пункт 7 управления сетью повторяет трансляцию текущего внешнего целеуказания, используя другие узлы 5 ретрансляционно-радиопеленгационной сети, до получения необходимых подтверждений приема текущего внешнего целеуказания радиопоисковыми установками 28, установленными на борту ТС быстрого реагирования, участвующими в операции по перехвату данного УТС.
Для формирования текущего внешнего целеуказания необходима связь устройства 2 охранной сигнализации УТС с диспетчерским центром 19 (для контроля текущего местоположения УТС). Как указывалось выше, такая связь возможна либо через автономное передающее устройство 4 по ретрансляционно-радиопеленгационной сети 6, либо через приемопередающий модуль 18 по стандартной сотовой сети подвижной связи (по GSM-каналу).
Однако угонщики, например, с помощью помехопостановщиков, способны прервать оба эти канала связи и в определенный момент лишить диспетчерский центр 19 возможности контроля текущего местоположения УТС.
В результате у диспетчерского центра 19 и экипажей ТС быстрого реагирования возникает дилемма: либо продолжать преследование УТС и пытаться захватить угонщиков, либо дистанционно заглушить двигатель УТС, используя, например, как в системе-прототипе, канал пейджинговой связи. Однако канал пейджинговой связи тоже может быть заглушен преднамеренной помехой. В этом случае диспетчерский центр 19 полностью потеряет контроль над УТС.
Рассматриваемый способ позволяет разрешить указанное противоречие и оптимизировать процесс поиска и перехвата УТС. Согласно указанному способу, блокирование движения УТС осуществляют автоматически, непосредственно на борту УТС при обнаружении факта срыва сопровождения УТС в обоих каналах слежения, то есть в канале, использующем ретрансляционно-радиопеленгационную сеть 6 (например, после того, как угонщики вывели из строя автономное передающее устройство 4), и в GSM-канале (например, вследствие глушения помехой). Факт срыва сопровождения в GSM-канале обнаруживают с помощью второго блока 33 подтверждения наличия связи. В штатном режиме работы стандартной сотовой сети подвижной связи базовая станция этой сети периодически излучает тест-сигнал. Этот сигнал принимается приемопередающим модулем 18 и подается во второй блок 33 подтверждения наличия связи, структурная схема которого приведена на фиг.5.
Второй блок 33 подтверждения наличия связи анализирует факт наличия связи по стандартной сотовой сети подвижной связи по поступившим тест-сигналам. Уровень принятого тест-сигнала, поступившего с выхода приемопередающего модуля 18, относительно уровня помехи определяется в измерителе 34 отношения сигнал / помеха, входящем в состав второго блока 33 подтверждения наличия связи. Далее указанное отношение сигнал / помеха усредняется за заданный интервал времени в блоке 35 усреднения и сравнивается с порогом в решающем блоке 36. Если усредненное значение отношения сигнал / помеха достигает (или оказывается ниже) заранее установленного порога, то в микроконтроллер 3 подается соответствующий сигнал отсутствия связи.
При поступлении сигналов отсутствия связи как с первого 16, так и со второго 33 блоков подтверждения наличия связи, то есть, при отсутствии связи как по ретрансляционно-радиопеленгационной сети 6, так и по сотовой сети подвижной связи, микроконтроллер 3 формирует последовательность команд постепенного автоматического блокирования движения УТС, которая подается на дополнительный узел 37 блокирования движения, например на иммобилайзер, и далее на соответствующие исполнительные органы. Движение УТС замедляется, и осуществляется его принудительная остановка. При наличии связи хотя бы по одной из указанных сетей автоматического блокирования движения УТС не происходит.
Одновременно с рассмотренным выше блокированием движения УТС по команде микроконтроллера 3 активируется объектовое оконечное устройство 38, которое начинает передавать в разрешенном диапазоне частот 433,92МГц±0,2% сигналы тревоги, содержащие идентификационные признаки УТС. Указанные сигналы тревоги также представляют собой помехоустойчивые hopping-сигналы. При приближении ТС быстрого реагирования к УТС на расстояние, соответствующее ошибке текущего внешнего целеуказания, наступает заключительная стадия перехвата. На этой стадии для достижения необходимой (порядка нескольких метров) точности определения координат УТС относительно ТС быстрого реагирования, осуществляющего перехват, используется радиопеленгация УТС в указанном выше разрешенном диапазоне частот и мощностей. Радиопеленгация УТС происходит следующим образом.
Hopping-сигналы, излучаемые объектовым оконечным устройством 38 с борта УТС, принимаются бортовым радиопеленгатором 39 радиопоисковой установки 28, находящейся на борту ТС быстрого реагирования, и поступают в блок 30 комплексной обработки информации. Обработка сигналов, принятых бортовым радиопеленгатором 39, позволяет достичь необходимой точности (единиц метров) определения относительных координат УТС и ТС быстрого реагирования. Результаты измерений используются экипажем ТС быстрого реагирования для высокоточного наведения своего ТС на контролируемое УТС на заключительной стадии перехвата. При этом время наведения сокращается до минимума, поскольку УТС находится в неподвижном состоянии (вследствие блокирования двигателя), а ошибка определения координат УТС относительно ТС быстрого реагирования уменьшается по мере их сближения. Использование hopping-сигнала и небольшое расстояние между источником и приемником излучения гарантируют устойчивое сопровождение УТС с борта ТС быстрого реагирования даже в условиях применения угонщиками преднамеренных помех.
Движение УТС может быть принудительно заблокировано и по внешней команде блокирования движения (если подача такой команды соответствует выбранной тактике перехвата УТС). Для подачи этой команды используется связь диспетчерского центра 19 с УТС по стандартной сотовой сети подвижной связи. Команда блокирования движения поступает на приемопередающий модуль 18, из нее выделяется код этой команды и передается на микроконтроллер 3. Микроконтроллер 3 после получения команды блокирования движения воздействует - через узлы блокирования движения и через дополнительный узел 37 блокирования движения - на исполнительные органы УТС. В результате УТС останавливается. Активации объектового оконечного устройства 38 при этом не происходит.
Таким образом, объединение описанных выше функциональных узлов радиоэлектронной аппаратуры в единый, работающий в реальном масштабе времени контур поиска, обнаружения, сопровождения и перехвата УТС порождает качественно новые свойства заявленного технического решения по сравнению с прототипом и позволяет решить поставленную задачу - создать технологию радиопоиска и перехвата УТС, повышающую эффективность действий участников операции "перехват" (экипажей ТС быстрого реагирования и персонала диспетчерского центра 19) в условиях применения угонщиками преднамеренных помех передаче тревожных извещений и постановки помех глобальной спутниковой системе радионавигации - GPS-приемнику 17.
Обеспечиваемый технический результат заключается в комплексном использовании возможностей находящегося на борту УТС охранно-противоугонного оборудования и размещенной на борту ТС быстрого реагирования радиопоисковой аппаратуры. Это позволяет своевременно обнаружить факт преднамеренного подавления каналов обмена данными между УТС и диспетчерским центром 19, автоматически блокировать движение УТС и перейти к его автономному сопровождению радиопоисковыми установками 28, установленными на борту ТС быстрого реагирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2320505C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| СПОСОБ ПЕРЕДАЧИ ИЗВЕЩЕНИЙ ОБ УГОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2363600C1 |

Изобретение относится к радиопоисковым технологиям, используемым для борьбы с угонами транспортных средств (ТС). Охранными извещателями обнаруживают проникновение злоумышленника в ТС и формируют тревожные извещения, которыми модулируют высокочастотные сигналы. Последние передают по ретрансляционно-радиопеленгационной сети (РРС) и по стандартной сотовой сети (ССС) подвижной связи в диспетчерский центр. На угнанном ТС (УТС) по ССС принимают тест-сигналы, подтверждающие наличие связи его с диспетчерским центром. В диспетчерском центре селектируют и обрабатывают тревожные извещения, определяют идентификационные признаки УТС и его местоположение, передают начальные и текущие внешние целеуказания ТС быстрого реагирования, а в случае необходимости блокируют движение УТС. При передаче извещений по РРС контролируют на борту УТС совпадение передаваемых и принимаемых по радиоэфиру извещений. При отсутствии указанного совпадения формируют сигнал срыва приема по РРС. При приеме на УТС по ССС тест-сигналов определяют средние за заданный интервал значения отношения сигнал/помеха, сравнивают их с заданным порогом и при снижении до порогового уровня с одновременным срывом приема по РРС воздействуют на узлы блокирования движения УТС с его остановкой. Объектовым оконечным устройством излучают сигналы тревоги, которые пеленгуют на ТС быстрого реагирования. Пеленги и внешние целеуказания используют для управления движением ТС быстрого реагирования при перехвате УТС. Изобретение повышает эффективность действий участников операции “перехват” в условиях применения угонщиками средств постановки преднамеренных помех. 2 з.п. ф-лы, 7 ил.

| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2155684C1 |
| DE 4415052 A1, 02.11.1995. | |||

