Изобретение относится к области преобразовательной и импульсной техники и может быть использовано в преобразователях постоянного напряжения, автономных инверторах, регуляторах переменного напряжения и в других типах статических преобразователей с нелинейной регулировочной характеристикой.
Известен способ широтно-импульсного управления статическим преобразователем, заключающийся в том, что задают последовательность периодов модуляции, разворачивают на каждом периоде модуляции опорный сигнал пилообразной формы, который сравнивают с сигналом управления и формируют управляющие импульсы силовыми ключами статического преобразователя на каждом периоде модуляции в течение интервалов знакопостоянства разности опорного сигнала и сигнала управления [1].
Известный способ обладает ограниченными функциональными возможностями, поскольку не позволяет формировать требуемый вид зависимости выходного напряжения статического преобразователя от величины сигнала управления, в частности, осуществлять линеаризацию передаточной характеристики «вход-выход».
Известен способ широтно-импульсного управления статическим преобразователем, заключающийся в том, что задают последовательность периодов модуляции, разворачивают на каждом периоде модуляции опорный сигнал арккосинусоидальной формы, который сравнивают с сигналом управления и формируют управляющие импульсы силовыми ключами статического преобразователя на каждом периоде модуляции в течение интервала знакопостоянства разности опорного сигнала и сигнала управления [2].
Известный способ обладает ограниченными функциональными возможностями, поскольку не позволяет формировать требуемый вид зависимости выходного напряжения статического преобразователя от величины сигнала управления, а линеаризация передаточной характеристики «вход-выход» возможна только для статических преобразователей с регулировочной характеристикой косинусоидальной формы.
Наиболее близким к предлагаемому является способ широтно-импульсного управления статическим преобразователем, заключающийся в том, что задают последовательность периодов модуляции, разворачивают на каждом периоде модуляции опорный сигнал в виде пакета опорных импульсов различной амплитуды, который сравнивают с сигналом управления, и формируют управляющие импульсы силовыми ключами статического преобразователя на каждом периоде модуляции в течение интервала знакопостоянства разности опорного сигнала и сигнала управления [3].
Известный способ обладает ограниченными функциональными возможностями, поскольку обеспечивает только линеаризацию передаточной характеристики «вход-выход» магических преобразователей с косинусоидальной формой регулировочной характеристики. Это обусловлено фиксированным распределением опорных импульсов в пакете, формирующем только один вид развертки опорного сигнала по арккосинусоидальному закону.
Цель предлагаемого изобретения состоит в расширении функциональных возможностей путем коммутационного программирования развертки опорного сигнала и вида передаточной характеристики «вход-выход» статического преобразователя.
Поставленная цель достигается тем, что в диапазоне значений сигнала управления формируют ранжированную в порядке возрастания шкалу опорных напряжений U1<U2<...<Ui<...<UN, разворачивают на периоде модуляции вспомогательный сигнал пилообразной формы с амплитудой, равной UN, задают на шкале опорных напряжений N дискретнык отсчетов S0(Δτ),S0(2·Δτ),...,S0(j·Δτ),...,S0(N·Δτ) развертки опорного сигнала и составляют пакет из N прямоугольных опорных импульсов в процессе воспроизведения многоместных N-арных логических операций предикатной алгебры выбора



при отождествлении дискретных отсчетов S0(j·Δτ) с предметными переменными уi и формировании временной последовательности бинарных значений {0,1} составных весовых коэффициентов, удовлетворяющих условиям комплементарности


путем сравнения вспомогательного сигнала пилообразной формы с опорными напряжениями, осуществляют коммутационные перестановки между предметными переменными и дискретными отсчетами уi↔S0(j·Δτ) и выделяют гладкую составляющую развертки опорного сигнала.
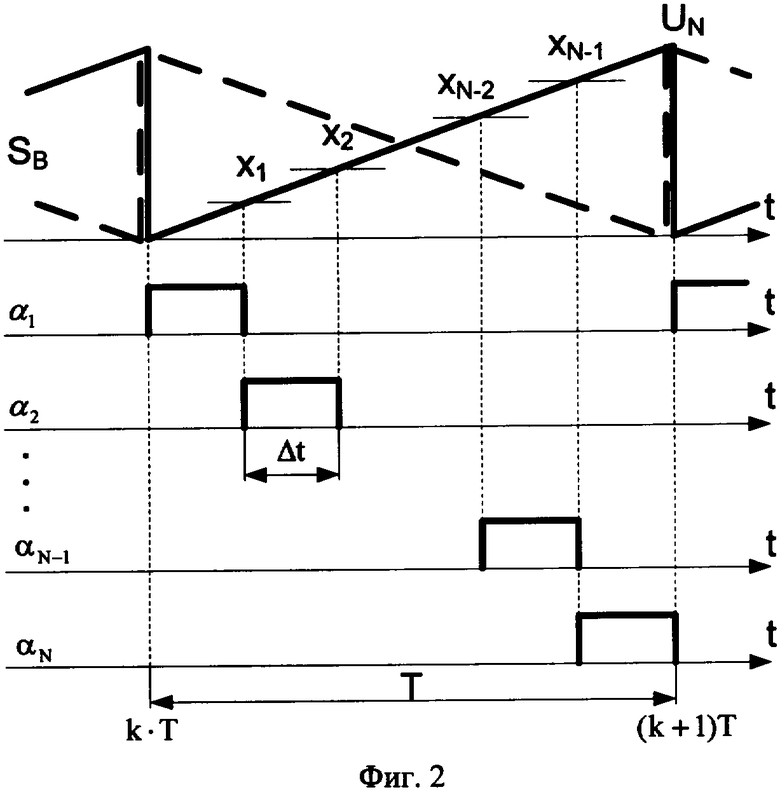
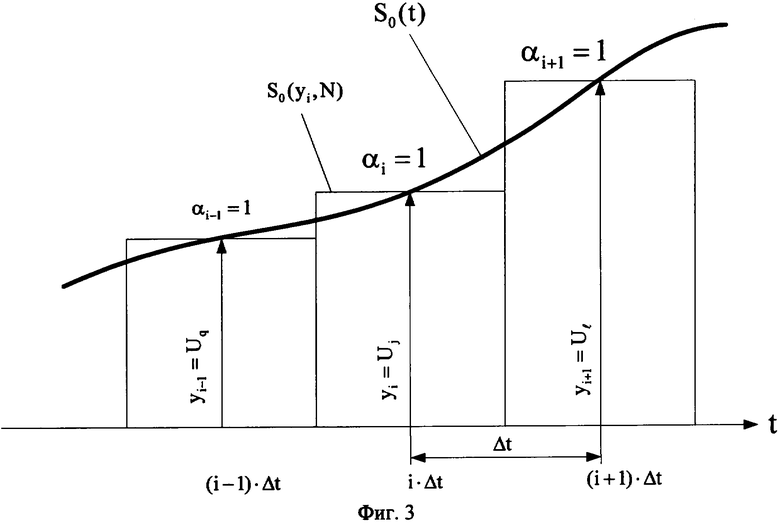
На фиг.1 изображена схема устройства, реализующего предлагаемый способ; на фиг.2 представлены временные диаграммы вспомогательного сигнала пилообразной формы и составных весовых коэффициентов на периоде модуляции; на фиг.3 показана последовательность опорных импульсов и «гладкая» составляющая программируемой развертки опорного сигнала.
Устройство, реализующее предлагаемый способ управления, содержит источник 1 опорных напряжений, генератор 2 вспомогательного сигнала пилообразной формы, коммутационную матрицу 3, ситуационный аналоговый мультиплексор 4, одноканальный релятор-модулятор 5 и статический преобразователь 6.
Выходы источника 1 опорных напряжений, формирующего шкалу ранжированных в порядке возрастания опорных напряжений U1<U2<...<Ui<...UN, подключены к горизонтальным шинам коммутационной матрицы 3, вертикальные шины которой разделены на две функциональные группы: группу вертикальных шин предикатных переменных (х1,х2,...,xN-1) и группу вертикальных шин предметных переменных (y1,y2,...,yN).
Ситуационный аналоговый мультиплексор 4 состоит из (N-1) одноканальных реляторов 7, каждый из которых содержит дифференциальный компаратор 8, управляющий переключательным каналом, образованным замыкающим 9 и размыкающим 10 ключами. Прямые входы дифференциальных компараторов 8 всех (N-1) одноканальных реляторов 7 объединены и образуют информационный вход ситуационного аналогового мультиплексора 4, подключенный к выходу генератора 2 вспомогательного сигнала пилообразной формы. Инверсные входы дифференциальных компараторов 8 одноканальных реляторов 7 подключены к группе вертикальных шин предикатных переменных (х1,х2,...,xN-1) коммутационной матрицы 3. Идентификация каждого одноканального релятора 7 в составе ситуационного аналогового мультиплексора 4 осуществляется индексом подключенной предикатной переменной (x1,x2,...,xN-1). Замыкающий 9 и размыкающий 10 ключи переключательных каналов смежных пар одноканальных реляторов 7 соединены последовательно, причем свободные выводы замыкающих ключей 9 подключены к группе вертикальных шин предметных переменных (у2,...,yN-1) коммутационной матрицы 3, а свободные выводы размыкающих ключей 10 объединены и образуют информационный выход ситуационного аналогового мультиплексора 4, подключенный к фильтру нижних частот 11. Выводы размыкающего 10 и замыкающего 9 ключей «крайних» одноканальных реляторов 7 подключены к вертикальным шинам предметных переменных у1, уn коммутационной матрицы 3 и к информационному выходу ситуационного аналогового мультиплексора 4 соответственно.
Прямой вход дифференциального компаратора 12 одноканального релятора-модулятора 5 подключен к выходу фильтра нижних частот 11, а на инверсный вход подается сигнал управления Sy. Замыкающий ключ 13 переключательного канала одноканального релятора-модулятора 5 подключен к источнику положительного напряжения +UM, размыкающий ключ 14 подключен к источнику отрицательного напряжения -UM. Свободные выводы замыкающего 13 и размыкающего 14 ключей объединены и образуют выход одноканального релятора-модулятора 5, подключенный к управляющему входу силовых ключей статического преобразователя 6.
На фиг.1, 2, 3 приняты следующие обозначения: U1,U2,...,UN-1,UN - шкала опорных напряжений: (х1, х2,...,хN-2,хN-1) - предикатные переменные; (у1,у2,...,уN-1,уN) - предметные переменные; SB - вспомогательный сигнал пилообразной формы; α1, α2,...,αN-2,αN-1,αN - составные весовые коэффициенты; S0(yi,N),S0(t) - логико-алгебраическая аппроксимация и гладкая составляющая программируемой развертки опорного сигнала; Sy - сигнал управления; Sшим - выходной широтно-импульсный сигнал; Uвых - выходное напряжение статического преобразователя 6; Т - продолжительность периода модуляции; Δt - длительность составного весового коэффициента.
Предлагаемый способ широтно-импульсного управления статическим преобразователем заключается в следующем.
Одноканальный релятор 7 (5) аппаратурно воспроизводит базовые бинарные операции предикатной алгебры выбора (ПАВ), к которым относятся ПАВ-дизъюнкция (Λ) и ПАВ-конъюнкция (V)


где у1, у2 - предметные переменные, действующие на переключательных входах замыкающего 9 (13) и размыкающего 10 (14) ключей соответственно; х1,х2 - предикатные переменные, действующие на комнараторных входах дифференциального компаратора 8 (12), прямом и инверсном соответственно; I(x) - единичная функция, равная нулю при х<0 или единице при х≥0 и формируемая на выходе дифференциального компаратора 8(12).
Базовые бинарные операции (1), (2) осуществляют альтернативный выбор одной из двух предметных переменных либо у1, либо у2 по отношению сравнения предикатных переменных х1 и х2. Многократным повторением процедуры предметной суперпозиции, когда в качестве предметных переменных используются бинарные операции вида (1), (2), образуются многоместные операции ПАВ-дизъюнкции (Λ) и ПАВ-конъюнкции (V)


где у1,...,уN - предметные переменные; αi,  i, - составные весовые коэффициенты, принимающие бинарные значения {0,1} и удовлетворяющие условиям комплементарности
i, - составные весовые коэффициенты, принимающие бинарные значения {0,1} и удовлетворяющие условиям комплементарности


Составной весовой коэффициент  определяется произведением K=C2 (N-1)единичных функций
определяется произведением K=C2 (N-1)единичных функций


где К - количество бинарных отношений порядка на заданном наборе предикатных переменных х1,...,х(N-1), равное числу сочетаний из (N-1) элементов по два;  есть либо
есть либо


Определение составного весового коэффициента  (
( ) заключается в составлении для i-й ситуации бинарных отношений порядка
) заключается в составлении для i-й ситуации бинарных отношений порядка  каждому из которых соответствует единичная функция
каждому из которых соответствует единичная функция  . Произведение всех единичных функций для данной ситуации определяет соответствующий составной весовой коэффициент (5), (6).
. Произведение всех единичных функций для данной ситуации определяет соответствующий составной весовой коэффициент (5), (6).
Многоместные логические операции (3), (4) аппаратурно воспроизводит ситуационный аналоговый мультиплексор 4 при подаче на информационный вход с генератора 2 вспомогательного сигнала пилообразной формы
который разворачивается на периоде модуляции Т в пределах шкалы опорных напряжений U1,...,Ui,...,UN. (Здесь τ=t/T - локальное время на периоде модуляции.) В коммутационной матрице 3 подключением (на фиг.1 отмечено «*») горизонтальных шин к соответствующим вертикальным шинам (x1,x2,...,xN-1) выполняется процедура отождествления предикатных переменных с опорными напряжениями
x1=U1; x2=U2; ... xN-1=UN-1
Тогда на каждом периоде широтно-импульсной модуляции повторяются следующие ситуации (фиг.2):
в каждой из которых формируется соответствующий составной весовой коэффициент
Необходимо отметить, что единичные функции I(SB-0) и I(UN-SB) тождественно равны 1 при положительной полярности вспомогательного сигнала SB пилообразной формы и амплитуде, равной UN. Поэтому в ситуационном аналоговом мультиплексоре 4 каждый составной весовой коэффициент αi(i≠1,i≠N) формируется парой одноканальных реляторов 7 с последовательно соединенными замыкающим ключом 9 в одном и размыкающим ключом 10 в другом (фиг.1), что соответствует конъюнкции единичных функций в соотношениях (7). Только составные весовые коэффициенты αi и αN согласно (7) формируются одним ключом, размыкающим 10 и замыкающим 9 соответственно в «крайних» одноканальных реляторах 7. В результате каждый одноканальный релятор 7 ситуационного аналогового мультиплексора 4 участвует в формировании двух смежных составных весовых коэффициентов αi и αi+1. Процедуру формирования составных весовых коэффициентов (7) поясняют временные диаграммы, представленные на фиг.2.
Подключением вертикальных шин (у1,у2,...,уN) в коммутационной матрице 3 к горизонтальным шинам осуществляется процедура отождествления предметных переменных. В общем случае i-я предметная переменная у может отождествляться с j-м опорным напряжением Uj источника опорных напряжений 1, т.е. уi=Uj. В результате на информационном выходе ситуационного аналогового мультиплексора 4 в процессе реализации многоместной логической операции (3) или (4) на каждом периоде модуляции Т формируется последовательность напряжений {...yi-1=Uq, уi=Uj, yi+1=Ul...,}, которая является логико-алгебраической аппроксимацией S0(yi,N) гладкой составляющей S0(t) развертки опорного сигнала, как показано на фиг.3. Продолжительность каждой ступени одинакова и равна Δt=T/N, а «высота» ступеней индивидуальна и определяется величиной одного из опорных напряжений Uj источника опорных напряжений 1. Точность аппроксимации определяется выбором соответствующей арности (N) многоместных логико-алгебраических операций (3), (4).
Изменением вариантов отождествления предметных переменных уi и опорных напряжений Uj в коммутационной матрице 3 реализуется процедура коммутационного программирования логико-алгебраической аппроксимации S0(yi,N) опорного сигнала. В результате на информационный выход ситуационного аналогового мультиплексора 4 опорные напряжения U1,...,UN подаются в последовательности, обеспечивающей необходимую развертку опорного сигнала So(yi,N), гладкая составляющая S0(t) которого выделяется фильтром нижних частот 11.
Одноканальный релятор-модулятор 5 воспроизводит базовые бинарные операции (1), (2) при отождествлении предикатных переменных
x1=So(t); x2=Sy
с гладкой составляющей развертки опорного сигнала и с сигналом управления, а предметных переменных
y1=UM;y2=-UM
с положительным UM и отрицательным (-UM) напряжениями соответственно. В результате на выходе одноканального релятора-модулятора 5 формируется широтно-модулированный сигнал Sшим, который описывается бинарной операцией (1)
 а при взаимозамещении предикатных переменных х1↔х2 или предметных переменных у1↔у2 - бинарной операцией (2)
а при взаимозамещении предикатных переменных х1↔х2 или предметных переменных у1↔у2 - бинарной операцией (2)

Как видно из (8), (9), в процессе реализации базовых бинарных операций осуществляется сравнение гладкой составляющей развертки опорного сигнала программируемой формы So(t) с сигналом управления Sy, по результатам которого формируется выходная ШИМ-последовательность  . При указанных вариантах отождествления предметных и предикатных переменных базовые бинарные операции в форме (8), (9) формируют взаимно инверсные ШИМ-последовательности
. При указанных вариантах отождествления предметных и предикатных переменных базовые бинарные операции в форме (8), (9) формируют взаимно инверсные ШИМ-последовательности  и
и 
Для определения величины ступеней логико-алгебраической аппроксимации S0(yi,N) опорного сигнала необходимо знать регулировочную характеристику

и задать требуемый вид передаточной характеристики «вход-выход» статического преобразователя 6

который в типовых случаях может быть линейным, параболическим, логарифмическим, экспоненциальным, а в общем случае - произвольным.
Здесь γ=tИ/T - относительная длительность управляющего импульса широтно-модулированной последовательности  ; tИ - длительность управляющего импульса широтно-модулированной последовательности
; tИ - длительность управляющего импульса широтно-модулированной последовательности  .
.
Совместное решение (10) и (11) устанавливает взаимосвязь между величиной сигнала управления Sy и относительной длительностью γ управляющих импульсов широтно-модулированной последовательности  .
.

где f и f-1 - взаимно-обратные функции, удовлетворяющие условию f-1[f(Sy)]=Sy.
Формирование каждого импульса в широтно-модулированной последовательности  как следует из (8), (9), начинается в случае модуляции фронта при линейно нарастающем сигнале SB (фиг.2, сплошная линия) или заканчивается в случае модуляции среза при линейно спадающем сигнале SB (фиг.2, пунктирная линия) наступлением равенства
как следует из (8), (9), начинается в случае модуляции фронта при линейно нарастающем сигнале SB (фиг.2, сплошная линия) или заканчивается в случае модуляции среза при линейно спадающем сигнале SB (фиг.2, пунктирная линия) наступлением равенства

которое выполняется к первом случае в момент γ=(1-τ), а во втором случае в момент γ=τ.
Подстановка (13) в (12) при одновременной замене γ=(1-τ) или γ=τ в зависимости от разновидности модуляции дает соотношения
 ,
,

которые позволяют определить развертку опорного сигнала на периоде модуляции для любого выбранного типа статического преобразователя 6 по критерию формирования требуемой передаточной характеристики (11). Достаточно с помощью (13) вычислить N дискретных отсчетов S0(Δτ), S0(2·Δτ), ..., S0(j·Δτ), ..., S0(N·Δτ)
с одинаковым шагом Δτ=1/N, которые определяют величину соответствующих ступеней логико-алгебраической аппроксимации S0(yi,N) опорного сигнала при отождествлении с одноименными предметными переменными
y1=S0(Δτ); y2=S0(2·Δτ); ...; yi=S0(i·Δτ); ...; yN=S0(N·Δτ).
В коммутационной матрице 3 соответствующими соединениями между горизонтальными шинами и группой вертикальных шин (у1,y2,...уN) осуществляется фиксация каждой предметной переменной на ближайшем к расчетному значению дискретного отсчета уровне шкалы опорных напряжений U1,...,Ui,...,UN. Тогда в процессе функционирования устройства на информационном выходе ситуационного аналогового мультиплексора 4 формируется логико-алгебраическая аппроксимация S0(yi,N) опорного сигнала, обеспечивающая заданный вид (11) передаточной характеристики «вход-выход» статического преобразователя 6.
Для изменения передаточной характеристики достаточно изменить соединения в коммутационной матрице 3, т.е. выполнить процедуру коммутационного перепрограммирования развертки опорного сигнала.
В простейшем случае линеаризации передаточной характеристики «вход-выход» статического преобразователя 6
Uвых=Kсп·Sy
развертка опорного сигнала на периоде модуляции
должна повторить форму регулировочной характеристики, уменьшенную по величине (масштабированную) в Ксп раз. Здесь Ксп - коэффициент передачи «вход-выход» статического преобразователя 6.
Таким образом, предлагаемый способ позволяет получить положительный эффект, который заключается в расширении функциональных возможностей за счет коммутационного программирования развертки опорного сигнала, обеспечивающего не только линеаризацию, но и формирование заданного вида передаточной характеристики «вход-выход» статических преобразователей.
Источники информации
1. Источники вторичного электропитания. / В.А.Головацкий, Г.Н.Гулякович, Ю.И.Конев и др./ Под редакцией Ю.И.Конева. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 280 с.(рис.5.6, рис.5.7).
2. Зиновьев Г.С. Основы силовой электроники: Учеб. пособие. - Изд. 2-е, испр. и доп. - Новосибирск: Изд-во НГТУ, 2003. - 664 с.(с.508-510, рис.12.2.1).
3. А.с. 481113 (СССР), МКИ Н02р 13/16, H02m 1/08. Способ временной задержки управляющих импульсов. / В.Н.Гребенчук, В.Ф.Шапошников. - Заявлено 28.03.72; опубл. 15.08.75. Бюл. №30.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНОГО СИГНАЛА | 2007 |
|
RU2341016C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2001 |
|
RU2215363C2 |
| СИЛОВОЙ РЕЛЯТОР | 2001 |
|
RU2211484C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 2002 |
|
RU2228573C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЫХОДНОГО НАПРЯЖЕНИЯ ПРЕОБРАЗОВАТЕЛЯ ПЕРЕМЕННОГО ТОКА В ПОСТОЯННЫЙ | 2003 |
|
RU2257661C2 |
| СПОСОБ УПРАВЛЕНИЯ АНАЛОГОВЫМИ ВЫЧИСЛЕНИЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541850C2 |
| Способ преобразования постоянного напряжения в квазисинусоидальное с широтно-импульсной модуляцией для многоуровневых преобразователей частоты | 2024 |
|
RU2841510C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
Изобретение относится к области преобразовательной и импульсной техники и может быть использовано в преобразователях постоянного напряжения, автономных инверторах, регуляторах переменного напряжения и в других типах статических преобразователей с нелинейной регулировочной характеристикой. Цель изобретения - расширение функциональных возможностей путем коммутационного программирования развертки опорного сигнала и вида передаточной характеристики «вход-выход» статического преобразователя. Способ широтно-импульсного управления статическим преобразователем заключается в том, что задают последовательность периодов модуляции, разворачивают на каждом периоде модуляции опорный сигнал в виде пакета опорных импульсов различной амплитуды, который сравнивают с сигналом управления и формируют управляющие импульсы силовыми ключами статического преобразователя на каждом периоде модуляции в течение интервала знакопостоянства разности опорного сигнала и сигнала управления. Для достижения поставленной цели в диапазоне значений сигнала управления формируют ранжированную в порядке возрастания шкалу опорных напряжений U1<U2<...<Ui<...UN, разворачивают на периоде модуляции вспомогательный сигнал пилообразной формы с амплитудой, равной UN, задают на шкале опорных напряжений N дискретных отсчетов S0(Δτ), S0(2·Δτ), ..., S0(j·Δτ), ..., S0(N·Δτ) развертки опорного сигнала и составляют пакет из N прямоугольных опорных импульсов в процессе воспроизведения многоместных N-арных логических операций предикатной алгебры выбора
v(y1, K, yN)=y1·α1+y2·α2+K+yi·αi+K+yN·αN,

при отождествлении дискретных отсчетов S0(j·Δτ) с предметными переменными уi и формировании временной последовательности бинарных значений {0,1} составных весовых коэффициентов, удовлетворяющих условиям комплементарности
α1+α2+K+αi+K+αN=1,
 ,
,
путем сравнения вспомогательного сигнала пилообразной формы с опорными напряжениями, осуществляют коммутационные перестановки между предметными переменными и дискретными отсчетами yi↔S0(j·Δτ) и выделяют гладкую составляющую развертки опорного сигнала. 3 ил.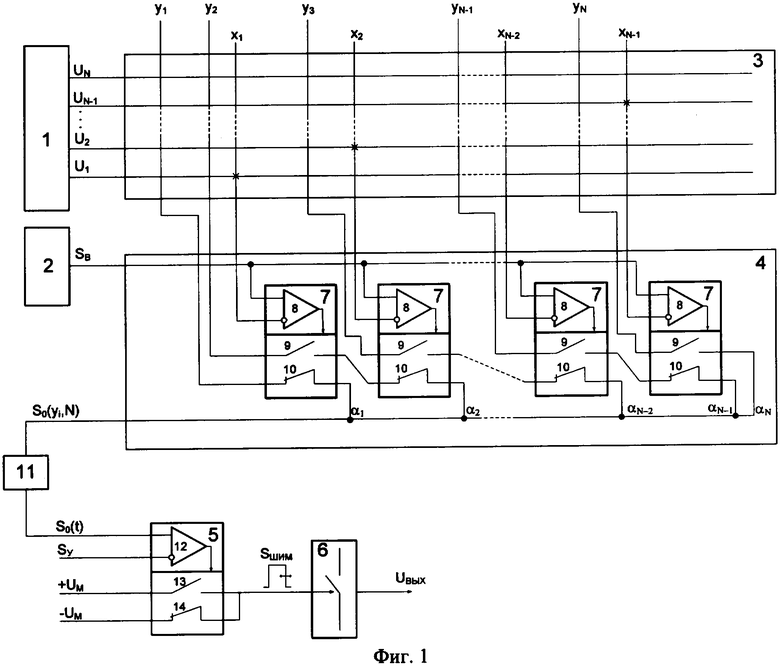
Способ широтно-импульсного управления статическим преобразователем, заключающийся в том, что задают последовательность периодов модуляции, разворачивают на каждом периоде модуляции опорный сигнал в виде пакета опорных импульсов различной амплитуды, который сравнивают с сигналом управления и формируют управляющие импульсы силовыми ключами статического преобразователя на каждом периоде модуляции в течение интервала знакопостоянства разности опорного сигнала и сигнала управления, отличающийся тем, что в диапазоне значений сигнала управления формируют ранжированную в порядке возрастания шкалу опорных напряжений U1<U2<...<Ui<...<UN, разворачивают на периоде модуляции вспомогательный сигнал пилообразной формы с амплитудой равной UN, задают на шкале опорных напряжений N дискретных отсчетов S0(Δτ), S0(2·Δτ), ..., S0(j·Δτ), ..., S0(N·Δτ) развертки опорного сигнала и составляют пакет из N прямоугольных опорных импульсов в процессе воспроизведения многоместных N-арных логических операций предикатной алгебры выбора
v(y1,..., yN)=y1·α1+y2·α2+...+yi·αi+...+yN·αN,

при отождествлении дискретных отсчетов S0(j·Δτ) с предметными переменными уi, и формировании временной последовательности бинарных значений {0,1} составных весовых коэффициентов, удовлетворяющих условиям комплементарности


путем сравнения вспомогательного сигнала пилообразной формы с опорными напряжениями, осуществляют коммутационные перестановки между предметными переменными и дискретными отсчетами yi↔S0S0(j·Δτ) и выделяют гладкую составляющую развертки опорного сигнала,
U1, U2, ..., Ui, ..., UN - шкала опорных напряжений;
S0(Δτ), S0(2·Δτ), ..., S0(j·Δτ), ..., S0(N·Δτ) - дискретные отсчеты развертки опорного сигнала;
v(y1,...yN, Λ(у1, ..., yN) - многоместные логические операции предикатной алгебры выбора;
N - арность многоместных логических операций;
У1 ..., УN - предметные переменные;
(α1,..., αN), - составные весовые коэффициенты;
- составные весовые коэффициенты;
Δτ - относительная продолжительность составных весовых коэффициентов.
| Способ временной задержки управляющих импульсов | 1972 |
|
SU481113A1 |
| RU 2000658 C, 07.09.1993 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

