Область техники.
Изобретение относится к автоматике и аналоговой вычислительной технике и предназначено для обработки в реальном масштабе времени быстро меняющихся аналоговых сигналов датчиков в авиационных и ракетно-космических системах автоматического управления.
Уровень техники.
Известен способ [1], в котором предметные переменные y1, y2 отождествляют с напряжениями e1(t), e2(t) таким образом, что y1=e1(t), y2=e2(t), предикатные переменные x1, x2 отождествляют с опорным сигналом u0(t) и сигналом управления uy таким образом, что x1=u0(t), x2=uy, а выходное напряжение U формируют в соответствии с предикатно-логической функцией

в которой вид воспроизводимой операциями предикатной алгебры выбора (ПАВ) задают двухразрядным цифровым кодом D1 D0.
Известный способ ограничивается определением соотношений между входными напряжениями и логическим выбором одного из двух напряжений e1(t), e2(t), основан на ПАВ, поэтому не может быть использован в качестве универсального средства для управления вычислением произвольных многомерных функций обработки аналоговых сигналов.
Наиболее близок по технической сущности к предлагаемому способ адресно-ранговой идентификации [2], который заключается в определении ранга  каждой i-й компоненты xi=x(γi) кортежа X=(x1, …, xi, …, xn) компоненты, компоненты xi с i-м адресом в кортеже X. Здесь Ip(x) есть единичная функция, равная нулю при x<0, единице при x>0, p∈{0,1} при x=0,
каждой i-й компоненты xi=x(γi) кортежа X=(x1, …, xi, …, xn) компоненты, компоненты xi с i-м адресом в кортеже X. Здесь Ip(x) есть единичная функция, равная нулю при x<0, единице при x>0, p∈{0,1} при x=0, 
Недостатком прототипа является отсутствие возможности оперативно управлять вычислениями при изменении количества и состава групп входных сигналов, оперативно управлять выбором произвольных обрабатывающих функций, унифицировать управление вычислениями для функционального наращивания и комплексирования устройств.
Наиболее близким к предложенному схемному решению является коммутационный релятор [3], содержащий компаратор, выход которого соединен с управляющими входами первого, второго, третьего и четвертого ключей, введены первый, второй, третий и четвертый резисторы, выходные выводы которых соединены соответственно с входными выводами первого, второго, третьего и четвертого ключей, входные выводы первого и второго резисторов соединены и образуют первый переключательный вход коммутационного релятора, входные выводы третьего и четвертого резисторов соединены и образуют второй переключательный вход коммутационного релятора.
Недостатком прототипа является ограничение выходных функций выбором одного из двух входных напряжений или выполнением функции управляемого делителя, коммутационный релятор применяется исключительно для создания схем управляемого сравнительного выбора групп сигналов, релятор не может быть использован в качестве универсального устройства для оперативного управления вычислением произвольных многомерных функций.
Техническим результатом является упрощение оперативного управления аналоговыми процессорами за счет применения унифицированных процедур логической обработки сигналов.
Поставленная цель достигается тем, что в способе каждый аналоговый сигнал дополняют логическим сигналом готовности, формируя сигнальный кортеж, сигнальные кортежи объединяют в обрабатываемые группы, к каждой группе кортежей применяют определенную для нее процедуру обработки процедура активируется в том и только в том случае, если конъюнкция логических сигналов готовности группы равна единице, в результате выполнения активированной процедуры формируют выходной сигнальный кортеж, в котором аналоговый сигнал определяется аналоговой функцией процедуры обработки, а логический сигнал готовности равен конъюнкции логических сигналов готовности входных сигнальных кортежей, в случае, если конъюнкция логических
сигналов готовности группы равна нулю, формируют выходной сигнальный кортеж, в котором логический сигнал готовности равен нулю, а аналоговый сигнал отсутствует.
Сигнальный кортеж дополняют логическим сигналом запрета, который имеет обратное значение относительно сигнала готовности, и используют его для блокировки несовместимых процедур обработки сигналов; для блокировки обработки группы сигналов сигнал запрета из несовместимой процедуры добавляют в конъюнкцию входных сигналов готовности группы; к группе сигналов применяют процедуру аналоговой обработки в том и только в том случае, если конъюнкция всех логических сигналов готовности группы и сигналов запрета, полученных из несовместимых процедур, для данного обработчика равна единице, при этом формируют новый сигнальный кортеж, в котором аналоговый сигнал равен значению функции аналоговой обработки, логический сигнал готовности равен конъюнкции всех входных логических сигналов готовности группы и сигналов запрета.
Для обработки входных аналоговых сигналов применяют несовместные процедуры, которые ни при каких сочетаниях входных сигналов не могут быть выполнены одновременно, каждую несовместную процедуру применяют для обработки определенной только для нее группы входных сигналов, группы входных сигналов различных несовместных процедур не совпадают, выходы обработчиков несовместных процедур объединяют, при этом на объединенном выходе единовременно получают аналоговый сигнал только одной из несовместных процедур обработки, логический сигнал готовности объединения несовместных процедур обработки приравнивают дизъюнкции всех входных логических сигналов объединения несовместных процедур.
Поставленная цель в устройстве ситуационного управления (ситуаторе) достигается тем, что ситуатор включает: аналоговый блок, реализующий функцию обработки F(y1,y2,…,yk1), управляемый замыкающий ключ, логический блок, выполняющий логическую функцию «И» входных предикатных переменных - x1Λx2…Λxk2 (k1≤k2), инвертор; входы аналогового блока подключены к аналоговым входам ситуатора, выход аналогового блока подключен к первому информационному контакту ключа, второй информационный контакт ключа подключен к аналоговому выходу ситуатора; логические входы ситуатора подключены к входам логического блока, выход логического блока подключен к управляющему входу ключа, к первому логическому выходу ситуатора и к инвертору, выход инвертора подключен ко второму логическому выходу ситуатора.
В способе каждый аналоговый сигнал у дополнятся логическим сигналом готовности x, образуя сигнальный кортеж

который несет информацию не только о значении аналогового сигнала y, но и определяет логику его обработки, так как логический сигнал готовности x подтверждает присутствие аналогового сигнала в кортеже и дает разрешение на его обработку аналоговыми блоками устройства. Сигнальный кортеж будем называть активированным, если х=1, в противном случае сигнальный кортеж становится пассивным и аналоговый сигнал y не обрабатывается.
Структурирование передаваемых сигналов в виде сигнальных кортежей позволяет унифицировать логическую обработку аналоговых сигналов. Пусть U={u1, u2, …, un} - множество входных аналоговых сигналов устройства, a Q={q1, q2, …, qn} - множество входных логических сигналов, определяющих необходимость обработки или факт подачи на обработку соответствующих им входных аналоговых сигналов, которые необходимо преобразовать в выходные аналоговые сигналы uвых1, uвых2, …, uвыхр. Требуется получить значение аналоговых сигналов uвых путем преобразования входных аналоговых сигналов. Входные сигнальные кортежи (u1, q1), (u2, q2), …, (un, qn) необходимо преобразовать в выходные сигнальные кортежи (uвых1, qвых1), (uвых2, qвых2), …, (uвыхр, qвыхр). Для полученных процедур преобразования запишем правила формирования выходных сигналов на p выходах устройства обработки:
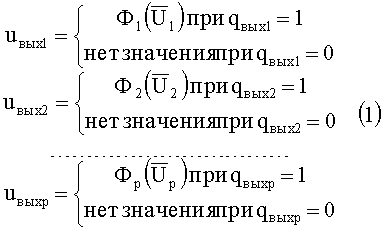

где qвыхj=∧qCQjq, QjCQ - подмножество j-й группы входных сигналов готовности устройства, Ф1, …, Фp - процедуры преобразования групп входных аналоговых сигналов 

Каждое из преобразований (1) выполняет процедуру обработки сигнальных кортежей и в дальнейшем может быть использовано для встраивания в более сложные структуры обработки аналоговых сигналов, работающие по тем же правилам. Оперативное управление устройством обработки сигналов реализуется выбором обрабатывающих процедур путем подачи на входы логических сигналов готовности.
Правило (1) не позволяет учитывать связи между различными маршрутами преобразования сигналов. Построение более сложных маршрутов преобразования аналоговых сигналов можно осуществить введением понятия несовместимости процедур обработки. Две процедуры обработки несовместимы, если выполнение одной из них делает недопустимой вторую. Для блокировки подключения несовместимого обработчика дополним сигнальный кортеж Yj отрицанием логического сигнала готовности ר xj,
Yj=(yj, xj, ¬xj)
В дальнейшем сигнал ר xj будем называть сигналом запрета.
Правило (2) формирования выходных сигналов на p выходах устройства обработки изменится следующим образом:

, где 



Правило (2) расширяет возможности способа оперативного управления обработкой входных сигналов. Допускается блокировка процедуры 











Представленные выше правила управления обработкой сигналов позволяют получать на каждом выходе устройства реализацию только одной функции преобразования аналоговых сигналов в зависимости от сигналов на входе. На практике часто требуется на одном выходе устройства получать различные функции обработки аналоговых сигналов. Рассмотрим способ расширения возможностей управления обработкой путем мультиплексирования процедур преобразования сигналов на одном выходе в зависимости от подачи на входы различных групп сигналов. Для этого введем понятие несовместности процедур обработки. Две процедуры обработки сигналов будут несовместны, если ни при каких комбинациях входных сигналов они не могут выполняться одновременно.
Правило формирования выходных сигналов на выходе устройства, объединяющего несовместные процедуры обработки, будет выглядеть

, где 


Сигнал готовности xвых на объединенном выходе устройства, реализующего несовместные процедуры, определяется как дизъюнкция сигналов готовности входных сигнальных кортежей: хвых=q1V…Vqn, образуя с аналоговым сигналом выходной кортеж (uвых, xвых).
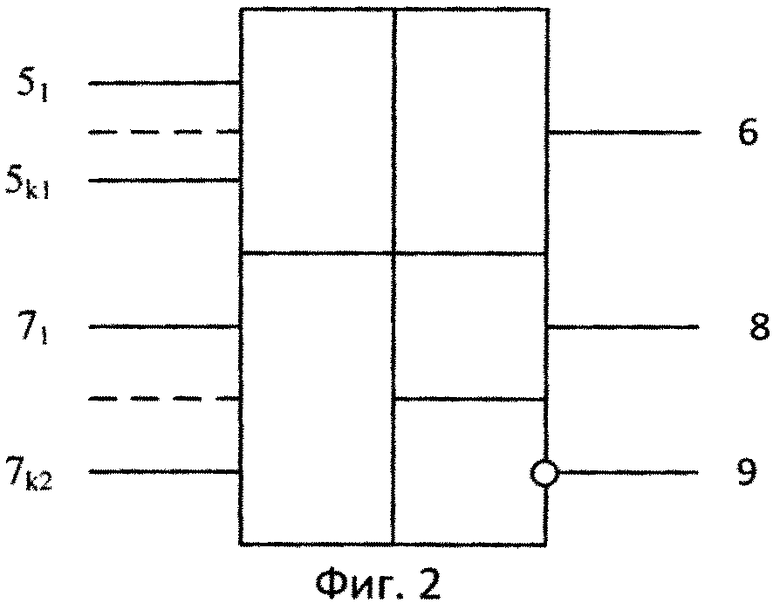
Для реализации процедур преобразования сигнальных кортежей по правилам (1)-(3) предлагается использовать устройство ситуационного управления (ситуатор). На основе ситуатора могут создаваться устройства, выполняющие более сложные процедуры ситуационного управления по тем же правилам. Структурная схема ситуатора показана на фиг.1. На фиг.2 показано принятое здесь обозначение ситуатора в схемах. Ситуатор включает аналоговый блок 1, реализующий функцию обработки 

Схемная реализация способа в виде соединения ситуаторов позволяет получать различные устройства, в которых выполняется оперативное управление выходными функциями. Благодаря универсальности структуры сигналов, устройства на основе способа и модулей ситуационного управления легко объединять между собой, наращивая их функциональную сложность.
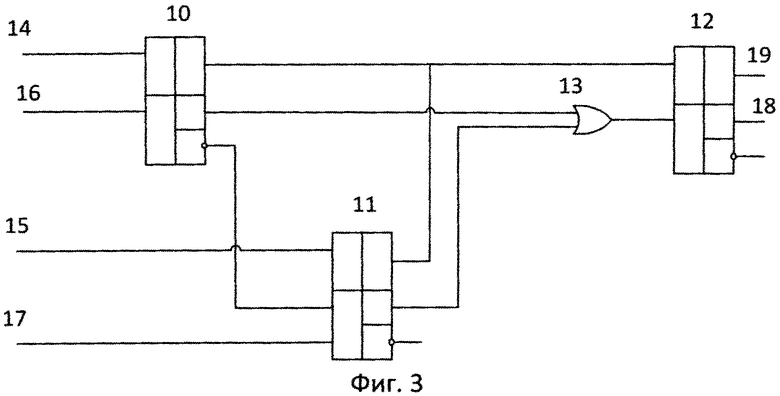
Рассмотрим пример применения способа для мультиплексирования интегралов двух функций ƒ1(y1) и ƒ2(y2) при подаче на два аналоговых входа напряжений y1 и y2. Результат, который должен быть получены на выходе мультиплексора в зависимости от значений управляющих сигналов q1 и q2 на логических входах, определяется ситуационной таблицей (Таблица 1).
Схема, выполняющая поставленную задачу, изображена на фиг.3. В схеме применены три ситуатора 10, 11, 12 и схема 2 или 13. На аналоговый вход 14 устройства подается напряжение y1, на аналоговый вход 15 подается напряжение y2. Управляющие сигналы q1 и q2 подаются соответственно на входы 16 и 17. Аналоговый блок ситуатора 10 выполняет функцию ƒ1(y1), аналоговый блок ситуатора 11 выполняет функцию ƒ2(y2), аналоговый блок ситуатора 12 выполняет интегрирование сигнала. Функции ƒ1 и ƒ2 несовместны, так как при активации функции ƒ1(y1) на вход ситуатора 11 со второго логического выхода ситуатора 10 подается блокирующий сигнал. Таким образом, на вход интегратора подается либо сигнал функции ƒ1(y1) при q1=1, либо сигнал функции ƒ2(y2) при q1=0 и q2=1, либо ничего не поступает при q1=0 и q2=0, так как выходные ключи ситуаторов 10 и 11 в последнем случае разомкнуты. В первых двух случаях на логическом выходе 18 устройства будет сформирован сигнал готовности (логическая единица), а на выходе 19 будет выполнятся интегрирование одной из двух функций. При q1=0 и q2=0 на логическом выходе 18 будет ноль, блокирующий работу модулей ситуационного управления, подключенных к выходу рассматриваемого устройства.
Унификация сигналов на входах и выходах позволяет применять схему мультиплексора выборочного интегрирования в качестве более сложного устройства ситуационного управления (фиг.4).
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями существенных признаков, тождественными всем признакам заявленного способа и устройства, отсутствуют, что указывает на соответствие заявленного изобретения условию патентоспособности "новизна".
Предложенные способ и устройство являются промышленно применимыми к существующим техническим средствам и соответствуют критерию «изобретательский уровень», так как они явным образом не следуют из уровня техники.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Источники информации
1. Кувшинов А.А. Способ преобразования напряжения. RU 2215363, МПК Н02М 9/00, G06G 7/25.
2. Волгин Л.И. Реляторные процессоры для ранговой и порядковой обработки аналоговых сигналов // Электронное моделирование. - 1991 - №4. С.28-32.
3. Волгин Л.И. Коммутационный релятор для воспроизведения базовых операций комплементарной алгебры. RU 2170456, МПК G06G 7/25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Континуальный процессор | 2020 |
|
RU2739723C1 |
| СПОСОБ ШИРОТНО-ИМПУЛЬСНОГО УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2008 |
|
RU2350007C1 |
| Аналоговый процессор с функциями управления вычислениями | 2017 |
|
RU2647672C1 |
| КОНЪЮНКТИВНО-ДИЗЪЮНКТИВНЫЙ РЕЛЯТОР С БЛОКИРОВКОЙ | 2003 |
|
RU2257612C1 |
| КОММУТАЦИОННЫЙ РЕЛЯТОР ДЛЯ ВОСПРОИЗВЕДЕНИЯ БАЗОВЫХ ОПЕРАЦИЙ КОМПЛЕМЕНТАРНОЙ АЛГЕБРЫ | 2000 |
|
RU2170456C1 |
| СИЛОВОЙ РЕЛЯТОР | 2001 |
|
RU2211484C2 |
| РЕЛЯТОРНЫЙ ПРОЦЕССОР ДЛЯ АДРЕСНО-РАНГОВОЙ ОБРАБОТКИ КОРТЕЖЕЙ АНАЛОГОВЫХ СИГНАЛОВ | 1995 |
|
RU2120662C1 |
| ПРОЦЕССОР ДЛЯ АДРЕСНО-РАНГОВОЙ ИДЕНТИФИКАЦИИ И СЕЛЕКЦИИ АНАЛОГОВЫХ СИГНАЛОВ | 1994 |
|
RU2093888C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЙ | 1992 |
|
RU2042186C1 |
| РАНГОВЫЙ СЕЛЕКТОР | 2005 |
|
RU2292586C1 |

Группа изобретений относится к автоматике и аналоговой вычислительной технике и предназначена для обработки в реальном масштабе времени быстро меняющихся аналоговых сигналов датчиков в авиационных и ракетно-космических системах автоматического управления. Техническим результатом является управление вычислением произвольных многомерных функций за счет применения унифицированных логических процедур. Устройство содержит аналоговый блок, реализующий функцию обработки F(y1,y2,…,yk1), управляемый ключ, логический блок, выполняющий логическую функцию «И» входных предикатных переменных, инвертор. 2 н. и 2 з.п. ф-лы, 4 ил., 1 табл.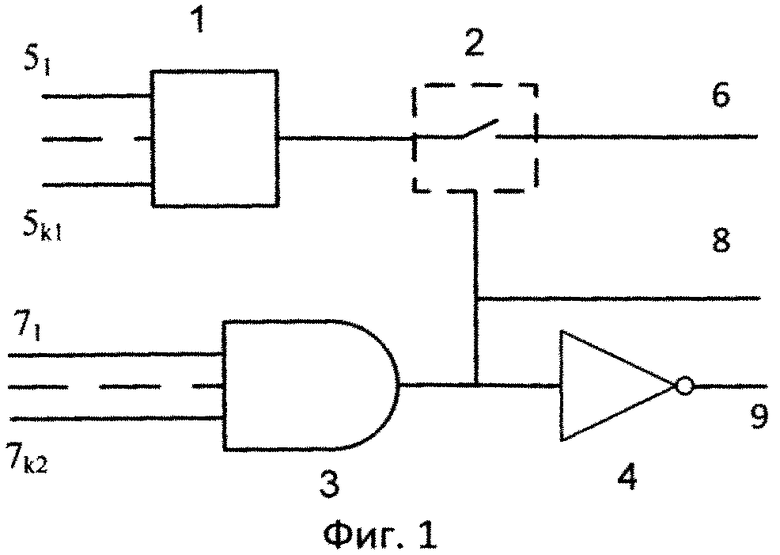
1. Способ управления аналоговыми вычислениями, в котором выполняют выбор процедур обработки аналоговых сигналов путем подачи на управляющие входы логических сигналов, отличающийся тем, что каждый аналоговый сигнал дополняют логическим сигналом готовности, формируя сигнальный кортеж, сигнальные кортежи объединяют в обрабатываемые группы, к каждой группе кортежей применяют определенную для нее процедуру обработки, процедура активируется в том и только в том случае, если конъюнкция логических сигналов готовности группы равна единице, в результате выполнения активированной процедуры формируют выходной сигнальный кортеж, в котором аналоговый сигнал определяется аналоговой функцией процедуры обработки, а логический сигнал готовности равен конъюнкции логических сигналов готовности входных сигнальных кортежей, в случае, если конъюнкция логических сигналов готовности группы равна нулю, формируют выходной сигнальный кортеж, в котором логический сигнал готовности равен нулю, а аналоговый сигнал отсутствует.
2. Способ управления аналоговыми вычислениями по п.1, отличающийся тем, что сигнальный кортеж дополняют логическим сигналом запрета, который имеет обратное значение относительно сигнала готовности, и используют его для блокировки несовместимых процедур обработки сигналов; для блокировки обработки группы сигналов сигнал запрета из несовместимой процедуры добавляют в конъюнкцию входных сигналов готовности группы; к группе сигналов применяют процедуру аналоговой обработки в том и только в том случае, если конъюнкция всех логических сигналов готовности группы и сигналов запрета, полученных из несовместимых процедур, для данного обработчика равна единице, при этом формируют новый сигнальный кортеж, в котором аналоговый сигнал равен значению функции аналоговой обработки, логический сигнал готовности равен конъюнкции всех входных логических сигналов готовности группы и сигналов запрета.
3. Способ управления аналоговыми вычислениями по п.1, отличающийся тем, что для обработки входных аналоговых сигналов применяют несовместные процедуры, которые ни при каких сочетаниях входных сигналов не могут быть выполнены одновременно, каждую несовместную процедуру применяют для обработки определенной только для нее группы входных сигналов, группы входных сигналов различных несовместных процедур не совпадают, выходы обработчиков несовместных процедур объединяют, при этом на объединенном выходе единовременно получают аналоговый сигнал только одной из несовместных процедур обработки, логический сигнал готовности объединения несовместных процедур обработки приравнивают дизъюнкции всех входных логических сигналов объединения несовместных процедур.
4. Устройство ситуационного управления для осуществления управления аналоговыми вычислениями, содержащее аналоговый блок, реализующий функцию обработки F(y1,y2,…,yk1), управляемый замыкающий ключ, логический блок, выполняющий логическую функцию «И» входных предикатных переменных - x1Λx2…Λ xk2 (k1≤k2), инвертор, отличающееся тем, что входы аналогового блока подключены к аналоговым входам устройства, выход аналогового блока подключен к первому информационному контакту ключа, второй информационный контакт ключа подключен к аналоговому выходу устройства; логические входы устройства подключены к входам логического блока, выход логического блока подключен к управляющему входу ключа, к первому логическому выходу устройства и к инвертору, выход инвертора подключен ко второму логическому выходу устройства.
| КОММУТАЦИОННЫЙ РЕЛЯТОР ДЛЯ ВОСПРОИЗВЕДЕНИЯ БАЗОВЫХ ОПЕРАЦИЙ КОМПЛЕМЕНТАРНОЙ АЛГЕБРЫ | 2000 |
|
RU2170456C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ | 2001 |
|
RU2215363C2 |
| КОНЪЮНКТИВНО-ДИЗЪЮНКТИВНЫЙ РЕЛЯТОР С БЛОКИРОВКОЙ | 2003 |
|
RU2257612C1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| US 2011082596 A1, 07.04.2011 | |||
| US 5061866 A, 29.10.1991 | |||

