Изобретение относится к устройству контроля частоты вращения вращающейся детали машины.
Оно относится к технической области измерительной техники, в частности к устройствам, которые служат для контроля результатов измерений, и предназначено для контроля частоты вращения, например, вала турбины.
Во многих областях техники встречаются машины, которые для выполнения своих соответствующих задач содержат, по меньшей мере, одну вращающуюся деталь машины.
Например, турбины для выработки электрической энергии, например, газовые и паровые турбины, содержат рабочие колеса, которые преобразуют содержащуюся в рабочей среде турбины энергию в энергию вращения так, что посредством связанного с турбиной генератора может производиться электрическая энергия.
Частота произведенного подобным генератором электрического переменного напряжения непосредственно зависит от частоты вращения подключенной турбины.
Для обеспечения надежности энергоснабжения электрической сети энергоснабжения необходимо поддерживать частоту сети постоянной на желаемом значении (в Европе, например, на 50 Гц).
Возможные проблемы сети отражаются, между прочим, на мгновенной действительной частоте сети, отклоняющейся от желаемой частоты сети.
Например, мгновенная преобладающая частота сети понижается, если мощность, предоставленная в распоряжение сетью энергоснабжения, недостаточна, чтобы удовлетворить мгновенный спрос на мощность от потребителей, которые подключены к сети энергоснабжения. В подобном случае вследствие перегрузки частота вращения одной или нескольких турбин сети энергоснабжения более или менее сильно понижается.
Чтобы иметь возможность распознавать подобные колебания частоты вращения турбины и/или реализовывать регулирование частоты вращения во время эксплуатации турбины, необходимо контролировать частоту вращения.
Известным является устройство для определения частоты вращения тела (DE 3425472, класс G01P 3/481, 1986), которое содержит датчик частоты вращения, в котором подсчитываются импульсы внутри определенного временного периода и контролируется, является ли достигнутое значение равным или больше, чем значение, которое задано для вычисления частоты вращения. При положительном результате проверки численное значение направляют для последующей обработки.
Известное устройство не может гарантировать надежности проверки, так как уже при выходе из строя только одного из блоков контрольного устройства результаты на его выходе больше не являются достоверными.
Наиболее близким к предложенному устройству является устройство (авторское свидетельство СССР №1325485, класс G06F 11/18, 1986), которое содержит два идентичных канала, причем каждый из них состоит из мажоритарного элемента, входы которого служат входами соответствующего канала; при этом входы одного канала подключены к выходам трех однотипных, выполненных избыточно друг относительно друга, блоков и входы второго канала - к линии, служащей для контроля работоспособности; выходы каналов подключены через логические элементы к исполнительным блокам.
Если выходы двух работоспособных блоков равны, то устройство формирует сигнал, который равен выходным сигналам работоспособных блоков.
При отказе одного из блоков главного канала устройство формирует выходной сигнал, который равен номинальному значению выходного сигнала.
Это устройство рассматривается в качестве ближайшего уровня техники.
Недостаток известного устройства заключается в том, что при замене выходного сигнала вышедшего из строя канала на канал с номинальным значением выходного сигнала теряется достоверность результата.
В основе настоящего изобретения лежит поэтому задача создания устройства для определения частоты вращения вращающейся детали машины, которое работает надежно и более безотказно и является реализуемым более экономично с точки зрения затрат.
Задача, согласно изобретению, решается посредством устройства для контроля частоты вращения вращающейся детали машины, причем устройство содержит два параллельно расположенных подустройства, причем каждое подустройство содержит следующие компоненты:
- по меньшей мере, три сигнальных входа, к которым является соответственно подводимым выходной сигнал датчика частоты вращения,
- вычислительный блок, посредством которого из, по меньшей мере, одного выходного сигнала одного из датчиков частоты вращения является вычисляемой по меньшей мере частота вращения вращающейся детали машины, и,
- по меньшей мере, один сигнальный выход для выдачи частоты вращения, вычисленной вычислительным блоком.
При этом соответствующие друг другу сигнальные входы подустройств, соответственно, параллельно нагружены выходным сигналом одного из датчиков частоты вращения.
Устройством, согласно изобретению, должны, между прочим, надежно и достоверно защищаться от недопустимых и аварийных состояний устройства и агрегаты, в частности турбины. Устройство, согласно изобретению, является особенно пригодным для всех устройств, к которым предъявляются высокие требования к надежности, связанные с высокими требованиями к готовности соответствующих устройств. Это справедливо, прежде всего, для больших агрегатов, например турбин для выработки электрической энергии, выход из строя которых при известных условиях может вызывать большой экономический, а также и личный ущерб, например, как следствие несчастных случаев.
Устройство, согласно изобретению, выполнено посредством двух подустройств, которые реализованы в виде отдельных каналов, причем для выполнения задачи относительно контроля частоты вращения вращающейся детали машины достаточным является одно подустройство. Избыточное выполнение устройства, согласно изобретению, с двумя отдельными каналами (подустройствами) повышает готовность, так как функцию одного, возможно работающего с ошибками, канала устройства, согласно изобретению, может брать на себя другой канал без необходимости мириться с ухудшением функциональности.
За счет этого исключаются, в частности, ненужные отключения агрегата, так как при выходе из строя функции контроля частоты вращения одного из каналов эту задачу может брать на себя другой канал. В выполненных без избыточности устройствах контроля частоты вращения в противоположность этому при неисправном контроле частоты вращения было бы необходимым отключение контролируемого агрегата, хотя агрегат сам по себе не имеет неисправности.
Поэтому посредством соответствующего изобретению устройства обеспечена готовность контролируемого агрегата.
В частности, оба подустройства, то есть оба канала заявленного устройства, выполнены идентично.
Второй существенный аспект относительно достигнутой высокой готовности устройства, соответствующего изобретению, состоит в, соответственно, трехкратной регистрации сигнала частоты вращения каждым из подустройств.
При этом предусмотрены, по меньшей мере, три датчика частоты вращения, которые расположены на или вблизи контролируемой вращающейся детали машины и выходные сигналы которых поставляют входные сигналы для сигнальных входов каждого подустройства, согласно изобретению.
Выходной сигнал каждого из датчиков частоты вращения при этом включен параллельно обоим соответствующим сигнальным входам каждого подустройства. Тем самым для каждого подустройства для контроля и/или определения частоты вращения вращающейся детали машины имеются в распоряжении, по меньшей мере, три измеренных сигнала так, что, во-первых, при отказе одного подустройства его функцию берет на себя другое подустройство и, во-вторых, можно мириться с отказом, по меньшей мере, одного из датчиков частоты вращения так, как, например, посредством сравнения между собой выходных сигналов, по меньшей мере, трех датчиков частоты вращения можно надежно устанавливать, какой из трех выходных сигналов датчиков частоты вращения должен рассматриваться как ошибочный; дело в том, что в случае ошибки значение одного из выходных сигналов значительно отклоняется от двух других выходных сигналов (которые, в основном, идентичны) и может исключаться из определения частоты вращения.
Устройство, согласно изобретению, относительно своих подустройств работает предпочтительно в так называемом режиме работы "одно из двух", что означает, что из двух имеющихся частичных устройств одно является достаточным, чтобы предоставить в распоряжение желаемую функцию контроля и что в случае ошибки одного из частичных устройств его функцию может взять на себя соответственно другое частичное устройство.
В каждом из частичных устройств относительно сигналов частоты вращения предусмотрена так называемая избыточность "два из трех", что означает, что, по меньшей мере, один из трех приложенных к сигнальным входам каждого подустройства сигналов частоты вращения может быть ошибочным без ухудшения за счет этого функции контроля каждого подустройства.
В качестве альтернативного решения задачи в соответствии с изобретением может быть предусмотрено снабжать каждое из подустройств выходными сигналами соответственно присвоенных датчиков частоты вращения, причем для каждого подустройства предусмотрено соответственно три датчика частоты вращения, то есть в целом шесть датчиков частоты вращения. Таким образом, еще больше повышается готовность, так как могут допускаться также, по меньшей мере, два ошибочных сигнала частоты вращения, чтобы, тем не менее, иметь возможность правильного определения частоты вращения вращающейся детали машины.
В безотказном режиме работы вращающейся детали машины и датчиков частоты вращения агрегата, по меньшей мере, три измеренные величины в качестве выходных сигналов датчиков частоты вращения являются равными и не имеют между собой никаких недопустимых отклонений.
Если теперь одно из этих измеренных значений отклоняется от обоих других измеренных значений больше, чем на установленную, допустимую абсолютную величину, то оно идентифицируется как ошибочное и исключается из дальнейшей оценки.
В случае, если все измеренные значения отклоняются друг от друга больше, чем допустимо, то при известных обстоятельствах посредством сигнала защиты агрегат, частота вращения вращающейся детали которого контролируется, должен отключаться по причинам безопасности, так как тогда контроль частоты вращения и/или регулирование частоты вращения больше не является возможным.
В предпочтительной форме выполнения изобретения каждое подустройство, соответственно, содержит два сигнальных выхода для выдачи вычисленной вычислительным блоком частоты вращения, причем посредством первого из двух сигнальных выходов является выдаваемой каждая текущая частота вращения и причем посредством второго из двух сигнальных выходов являются выдаваемыми только такие текущие частоты вращения, значения которых лежат в заранее заданном диапазоне частот вращения, который является истинным подмножеством действительного рабочего диапазона частот вращения вращающейся детали машины.
Первый из двух сигнальных выходов при этом в любой момент времени эксплуатации вращающейся детали машины проводит его текущую частоту вращения независимо от того, запускается ли вращающаяся деталь машины как раз в работу и имеет низкую частоту вращения - при известных обстоятельствах, частоту вращения, равную нулю - или находится в режиме работы с нормальной частотой вращения или даже в режиме с частотой вращения выше номинальной.
Посредством первого из двух сигнальных выходов, следовательно, в каждом режиме работы в распоряжение предоставляется текущая частота вращения вращающейся детали машины, например, для индикации частоты вращения и/или дальнейшей обработки, например, посредством регулятора турбины.
Так как сигнальный выход, в общем, может представлять свои выходные значения сигнала, имеющиеся в виде выходного сигнала, только с ограниченной точностью, в частности, если речь идет о преобразозанных в цифровую форму выходных значениях сигнала, актуально приложенные выходные значения сигнала являются тем более неточными, чем больше выходной диапазон сигнала, который должен отображаться посредством сигнального выхода.
Чтобы в желаемом рабочем диапазоне частоты вращения, который содержит только частичный диапазон действительного рабочего диапазона частоты вращения, получить возможно точное значение для имеющейся текущей частоты вращения вращающейся детали машины, в устройстве, согласно изобретению, предусмотрен второй из двух сигнальных выходов.
Желаемый рабочий диапазон частоты вращения охватывает предпочтительно номинальную частоту вращения вращающейся детали машины, на которую рассчитана вращающаяся деталь машины и с которой вращающаяся деталь машины вращается в нормальном режиме работы.
Так как посредством второго из, по меньшей мере, двух сигнальных выходов должен представляться только частичный диапазон от действительно возможного диапазона частоты вращения вращающейся детали машины, точность, с которой может представляться значение частоты вращения из названного частичного диапазона, является более высокой по сравнению с точностью, с которой могут представляться посредством первого из обоих сигнальных выходов соответствующие значения частоты вращения из полного диапазона частоты вращения.
Названная повышенная точность представления и выдачи может быть, например, использована для реализации в диапазоне номинальной частоты вращения (если она охвачена названным частичным диапазоном) очень точного регулирования частоты вращения вращающейся детали машины посредством регулятора частоты вращения.
В случае турбины ее режим работы в диапазоне номинальной частоты вращения может особенно хорошо контролироваться и/или поддерживаться посредством регулятора турбины, так как в распоряжение может очень точно предоставляться, по меньшей мере, требующееся регулятором турбины измеренное значение текущей частоты вращения посредством второго из, по меньшей мере, двух сигнальных выходов так, что могут быстро и точно отрабатываться, в частности, отклонения от желаемой номинальной частоты вращения.
Действительный рабочий диапазон частоты вращения вращающейся детали машины охватывает, например, диапазон 0 об/мин - 4000 об/мин. Подобный действительный рабочий диапазон частоты вращения является особенно типичным для рабочего диапазона частоты вращения турбин для производства электрической энергии; заранее заданный диапазон частоты вращения (в качестве частичного диапазона действительного рабочего диапазона частоты вращения) охватывает при этом предпочтительно диапазон порядка 2900 об/мин - 3100 об/мин.
Подобный заданный диапазон частоты вращения охватывает номинальную частоту вращения очень многих турбин для производства электрической энергии так, что вычисленные с помощью второго из, по меньшей мере, двух сигнальных выходов частоты вращения в диапазоне номинальной частоты вращения могут выдаваться очень точно.
Предпочтительно посредством вычислительного блока каждого подустройства может вычисляться временное изменение частоты вращения, и посредством другого сигнального выхода может выдаваться вычисленное временное изменение частоты вращения.
При этом посредством вычислительного блока, например, из предыстории, по меньшей мере, двух, в частности, (непосредственно предшествующего) текущего и отстоящего на некоторое время назад значения частоты вращения вычисляют временное изменение частоты вращения. Для этого должны иметься в распоряжении только средства для запоминания вычисленных значений частоты вращения и должен быть известным временной интервал между, по меньшей мере, этими двумя значениями частот вращения.
Из определенной скорости изменения частоты вращения может быть выявлена другая информация о рабочем состоянии вращающейся детали машины. Из временного изменения частоты вращения, равного нулю, можно, например, заключить, что имеет место стабильный режим работы и не должны предприниматься никакие вмешательства.
Понижение частоты вращения в течение определенного периода времени в противоположность этому указывает на измененную, в частности, возросшую нагрузку, что обычно делает необходимым вмешательство в режим работы, так как частота вращения, в частности, в случае турбины должна, возможно, хорошо соответствовать желаемой номинальной частоте вращения. В последнем случае тогда при повышении нагрузки, например, должен повышаться подвод рабочей среды турбины, например, как пар и/или газ, чтобы также в данном случае повышения нагрузки иметь возможность поддержания желаемой номинальной частоты вращения.
Если частота вращения в течение определенного промежутка времени повысилась, то это указывает, например, на уменьшение нагрузки, что также в большинстве случаев делает необходимым вмешательство в режим, работы. В случае турбины подобные частоты вращения выше номинальной наступают, например, тогда, когда внезапно отделяется большая нагрузка от сети энергоснабжения. Турбина тогда является склонной к "разносу", в частности, если была отделена большая частичная нагрузка, и к вращению при известных условиях с очень повышенной сверх номинальной частотой вращения. Это может приводить к опасности для стабильности машины, но также и опасности для людей и окружающей среды.
Посредством этой формы выполнения изобретения могут надежно распознаваться временные изменения частоты вращения, которые часто требуют вмешательства в режим работы, чтобы снова восстановить желаемый нормальный режим работы.
Предпочтительно посредством вычислительного блока каждого подустройства может детектироваться превышение заранее установленного максимального временного изменения частоты вращения, и посредством другого сигнального выхода сообщения, в частности цифрового сигнального выхода, может выдаваться соответствующий выходной сигнал.
Заранее установленное максимальное временное изменение частоты вращения является мерой того, в рамках каких границ могут допускаться временные изменения частоты вращения. Так как во время нормального режима работы случаются колебания частоты вращения без необходимости вмешательства в режим работы, посредством этой формы выполнения может быть обеспечено, что только такие временные изменения частоты вращения влекут за собой вмешательство в режим работы, которые превышают заранее установленное максимальное временное изменение частоты вращения. Коль скоро эта максимальная скорость изменения частоты вращения превышена, об этом делается сообщение с помощью соответствующего сигнального выхода, например, в виде предупредительного цифрового сигнала, и соответствующие вмешательства в режим работы могут предприниматься по времени вскоре после предупредительного сигнала.
Предпочтительно посредством, по меньшей мере, одного из сигнальных выходов соответствующий выходной сигнал может выдаваться в виде электрического напряжения, в частности, в виде электрического напряжения в диапазоне от 0 до 10 вольт.
Электрическое напряжение может, например, особенно хорошо обрабатываться посредством электронных схем. Кроме того, посредством электрического напряжения могут представляться как аналоговые, так и цифровые сигналы. Диапазон значений аналогового сигнала напряжения может отображаться, например, на диапазон напряжения, и состояние двоичного сигнала может представляться, соответственно, присвоенным ему постоянным значением напряжения.
Обработка сигналов, кодированных электрическим напряжением, является широко распространенной, в частности, в случае управлений с программированием от ЗУ(SPS).
В названной последней форме выполнения электрическое напряжение имеет предпочтительно значение между 0 вольт и 10 вольт.
Для подобного диапазона напряжения имеется ряд так называемых плат аналогового вывода для управлений с программированием от ЗУ, которые без особых подгонок могут быть использованы в случае изобретения.
В дальнейшей предпочтительной форме выполнения изобретения устройство выполнено с возможностью цикличной цифровой обработки сигналов и, по меньшей мере, часть сигнальных выходов и/или часть выходных сигналов датчиков частоты вращения может передаваться от устройства или к устройству посредством шины данных.
Известные управления с программированием от ЗУ обрабатывают сигналы в цифровой форме и циклично. Длительность цикла, с которой обрабатываются сигналы определенных функций управления с программированием от ЗУ, например, зависит от скорости вычислений модуля управления с программированием от ЗУ, посредством которого реализована соответствующая функция. Особенно подходящая длительность цикла, позволяющая достаточно быструю регистрацию и выдачу частоты вращения в соответствующем изобретению устройстве, лежит при этом в диапазоне примерно 4-10 мс, в частности 6-8 мс.
Системы шин для передачи данных являются известными, в частности, в области уже упомянутых устройств управления с программированием от ЗУ и в системах управления. При этом различные сигналы передаются не через соответственно отдельные соединения, а по общему соединению, так называемой шине данных.
Таким образом, в частности, снижены расходы на монтаж между пользователями дистанционной связи, так как между ними не должны прокладываться отдельные линии.
Предпочтительно посредством вычислительного блока каждого подустройства можно устанавливать, является ли ошибочным, по меньшей мере, один из подключенных к сигнальным входам выходных сигналов датчиков частоты вращения.
В этой форме выполнения изобретения, по меньшей мере, три измеренных сигнала, поставляемых датчиками частоты вращения, контролируются каждым подустройством и проверяются на отклонение между ними.
Если все три измеренных сигнала имеют одинаковые значения, то нет никакого недопустимого отклонения и, тем самым, никакой ошибки, так что, например, одна из трех названных измеренных величин является достаточной, чтобы вычислить частоту вращения вращающейся детали машины.
Если сравнение трех названных измеренных величин показывает, что одна из измеренных величин отличается от обоих других измеренных величин более чем на заранее заданную, допустимую абсолютную величину, то идентифицированная таким образом как ошибочная измеренная величина дальше не обрабатывается, и частота вращения вычисляется из, по меньшей мере, одной из двух других измеренных величин.
Если же сравнение трех названных измеренных величин показывает, что все они отличаются друг от друга, то определение частоты вращения невозможно, так как нельзя решить, какие из выходных сигналов датчиков частоты вращения являются ошибочными и имеет ли место вообще корректный выходной сигнал; агрегат, вращающаяся деталь машины которого контролируется посредством устройства, в этом случае в большинстве случаев должен отключаться по причинам безопасности, например, посредством сигнала защиты, который формируется устройством, согласно изобретению. Как уже было упомянуто, готовность соответствующего изобретению устройства может быть повышена еще больше, если в каждое подустройство подается, соответственно, три отдельных измеренных сигнала, исходящих от различных датчиков частоты вращения. Посредством названного применения шести датчиков частоты вращения тогда можно допускать также отклонение друг от друга всех измеренных сигналов частичного устройства и избежать отключения агрегата, так как другое подустройство в этом случае может брать на себя всю функцию (в случае, если присвоенные ему датчики частоты вращения имеют самое большее одну ошибку).
В дальнейшей предпочтительной форме выполнения изобретения подустройства выполнены с возможностью взаимного обмена данными, причем данные содержат такие частичные данные, посредством которых может идентифицироваться работоспособность, по меньшей мере, одного из подустройств. Наряду с названньм в предыдущих формах выполнения изобретения собственного контроля каждого подустройства, причем идентифицируется один возможно ошибочный выходной сигнал датчика частоты вращения, в этой форме выполнения предусмотрен взаимный контроль обоих подустройств.
Для этого, например, от каждого подустройства регистрируют, по меньшей мере, три приложенных на сигнальных входах выходных сигнала датчиков частоты вращения, и перед выдачей вычисленной частоты вращения прогоняют тестовую программу каждого подустройства, причем в этой тестовой программе в качестве значений для сигнальных входов применяют тестовые данные, к которым заранее известны соответствующие подлежащие вычислению вычислительным блоком выходные данные. Если теперь результаты, вычисленные вычислительным блоком, к тестовым данным не совпадают с известными заранее результатами, то имеет место ошибка соответствующего подустройства, и от соответствующего подустройства передается соответствующее сообщение на другое подустройство. В нормальном случае вычисленный вычислительным блоком к тестовым данньм результат соответствует заранее известному результату так, что в этом случае работоспособность соответствующего подустройства является обеспеченной.
Если посредством тестовой программы одного из обоих подустройств обнаруживают подобную ошибку и посредством соответствующей тестовой программы другого подустройства не определяют никакой ошибки этого подустройства, тогда вычисленные результаты подустройства с ошибками отбрасываются и дальше обрабатываются результаты не имеющего ошибок подустройства.
Предпочтительно для контроля турбины во время ее работы, главным образом, используют первое из двух подустройств, а другое подустройство используют для контроля турбины в случае, если первое подустройство не является работоспособным.
В этой форме выполнения изобретения соответствующее изобретению устройство работает в виде так называемой схемы "главного-подчиненного", в которой в нормальном режиме работы функцию контроля берет на себя одно из обоих подустройств.
Если теперь, например, посредством программы тестирования этого подустройства, которое работает как главное, идентифицируется ошибка, то самое позднее после идентификации этой ошибки прогоняют соответствующую тестовую программу через другое подустройство, чтобы определить, работает ли оно безошибочно.
Если это имеет место, то выходные сигналы подустройства с ошибками отбрасывают, и для контроля частоты вращения вращающейся детали машины применяют выходные сигналы не имеющего ошибок подустройства.
При этом в случае ошибки переключение с главного подустройства на подчиненное подустройство происходит автоматизированно и в очень короткое время так, что имеет место непрерывный контроль вращающейся детали машины. За счет соответствующих, реализованных на подустройствах, алгоритмов контроля реализовано распознавание ошибок и при необходимости автоматическое переключение к безошибочной частичной функции.
Поставленная задача решается, кроме того, следующим устройством, а именно устройством для определения частоты вращения вращающейся детали машины, которое содержит два измерительных канала, причем каждый из этих каналов содержит приемник сигналов от, по меньшей мере, трех датчиков частоты вращения, который подключен к вычислительному блоку частоты вращения, в котором один из выходов служит в качестве выхода для текущей частоты вращения, а второй - в качестве выхода для частоты вращения, значения которой лежат в заранее заданном диапазоне частот вращения детали, по существу, турбины, который соответствует номинальной частоте вращения в нормальном режиме работы; устройство отличается тем, что одноименные (то есть соответствующие друг другу) выходы измерительных каналов объединены, и в каждом канале встроен анализатор для превышения заранее заданного максимального временного изменения частоты вращения, который формирует управляющее воздействие для выдачи выходного сигнала из одного из каналов, причем устройство может формировать выходной сигнал в виде электрического напряжения в диапазоне от 0 до 10 вольт или цифровой сигнал, который обеспечивает возможность циклической цифровой обработки сигнала, а также передачу посредством шины данных, по меньшей мере, части выходных сигналов и/или части выходных сигналов с датчиков частоты вращения к устройству.
Кроме того, процессор содержит мажоритарный элемент, который определяет, является ли ошибочным, по меньшей мере, один из подключенных к соответствующим входам выходных сигналов датчика частоты вращения. Два канала связаны между собой посредством шины данных, причем данные содержат такие субданные, которые могут служить для того, чтобы констатировать работоспособность, по меньшей мере, одного из каналов.
При этом согласно результатам, достигнутым при проверке работоспособности каналов, преимущественно используется первый канал.
В последующем два примера выполнения изобретения представлены более подробно.
При этом показывают:
фиг.1 - устройство, согласно изобретению, для контроля частоты вращения рабочего колеса турбины, и
фиг.2 - другое устройство, согласно изобретению.
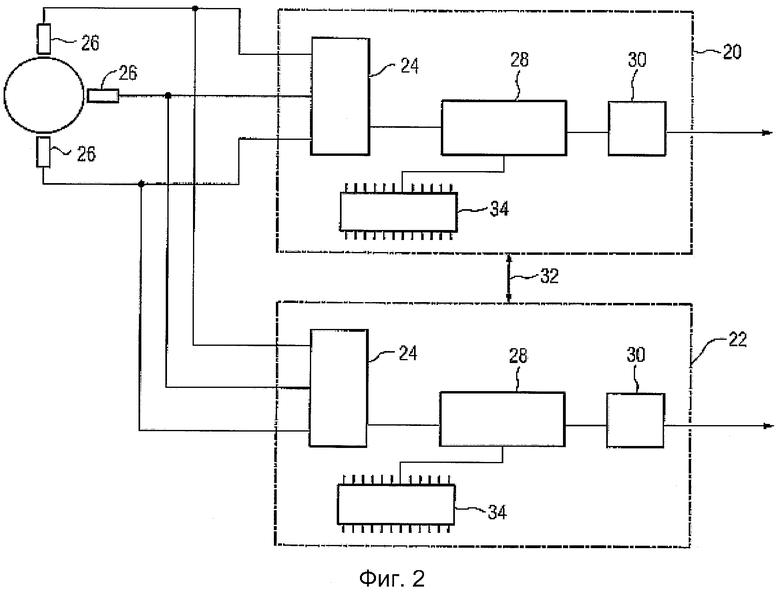
На фиг.1 представлено устройство 1, согласно изобретению, для контроля частоты вращения вращающейся детали 3 машины, в частности рабочего колеса турбины.
Для регистрации сигналов частоты вращения вращающейся детали 3 машины по окружности вращающейся детали 3 машины расположены три датчика 9 частоты вращения, которые детектируют расположенные, например, на окружности и вращающиеся во время работы маркеры или зубцы.
Выходные сигналы 11 датчиков 9 частоты вращения включены параллельно на сигнальные входы 51 первого подустройства 5 и второго подустройства 7, причем выходной сигнал 11 одного из датчиков 9 частоты вращения включен на соответствующие сигнальные входы 51, 71 обоих подустройств 5, 7. Сигнальные входы 51, 71 обоих подустройств 5, 7 связаны, соответственно, с вычислительным блоком 53, 73 соответствующего подустройства 5, 7.
Посредством вычислительного блока 53 или 73 в каждом подустройстве 5, 7 на основании, по меньшей мере, одного из выходных сигналов 11 датчиков 9 частоты вращения, приложенного к соответствующим сигнальным входам 51, 71, вычисляют частоту вращения вращающейся детали 3 машины. Это может проводиться, например, за счет того, что подсчитывают размещенные по окружности вращающейся детали машины маркеры или зубцы, и на основе промежутка времени измерения, в котором было определено ранее названное количество, и на основе общего количества маркеров или зубцов вычисляют мгновенную частоту вращения вращающейся детали 3 машины. Через первый сигнальный выход 551 первого подустройства или через первый сигнальный выход 751 второго подустройства может выдаваться вычисленная вычислительным блоком 53 или 73 частота вращения вращающейся детали 3 машины, причем названный первый сигнальный выход 551, 751 соответствующего подустройства 5, 7 может выдавать весь диапазон частоты вращения, который может быть реализован вращающейся деталью 3 машины. На названных первых сигнальных выходах 551, 751, таким образом, во время работы вращающейся детали 3 машины приложена ее вычисленная соответствующим вычислительным блоком 53 или 73 частота вращения, независимо от того, имеет ли вращающаяся деталь 3 машины очень малую частоту вращения, например, в процессе запуска, частоту вращения нормального режима работы или очень высокую частоту вращения, например, во время режима работы с превышенной сверх номинальной частотой вращения. Соответствующий выходной диапазон сигналов первых сигнальных выходов 551 или 751, следовательно, рассчитан на весь диапазон частоты вращения вращающейся детали 3 машины.
В противоположность этому посредством второго сигнального выхода 552, 752 соответствующего подустройства 5, 7 могут выдаваться только текущие частоты вращения вращающейся детали 3 машины, которые содержатся в заранее заданном диапазоне частоты вращения, который охватывает только подмножество действительного рабочего диапазона частоты вращения вращающейся детали 3 машины. Предпочтительно этот частичный диапазон частоты вращения описывает диапазон частоты вращения вокруг и вблизи номинальной частоты вращения, на которую рассчитана вращающаяся деталь 3 машины. Следовательно, выходной диапазон сигналов вторых сигнальных выходов 552 и 752 соответствующего подустройства 5, 7 находится в распоряжении для названного заранее заданного частичного диапазона рабочего диапазона частоты вращения вращающейся детали 3 машины так, что во время режима работы вращающейся детали 3 машины в этом частичном диапазоне посредством вторых сигнальных выходов 552 и 752 является возможной очень точная выдача текущей частоты вращения.
Названная высокая точность вторых сигнальных выходов 552 и 752 может, в частности, достигаться, если соответствующее изобретению устройство 1 или, по меньшей мере, вычислительные блоки 53 и 73 реализованы посредством цифровых вычислительных машин.
В случае цифровых вычислительных машин является, например, известным кодировать аналоговые значения 16 битами. При этом относительно точности кодированного значения получается большое различие, подлежит ли кодированию посредством этих названных в качестве примера 16 бит, например, малый диапазон значений 0-10 или значительно больший диапазон значений 0-100.000. Получающийся в первом случае порог квантования по абсолютной величине несколько меньше, чем порог квантования, получающийся во втором случае, так, что кодированные значения в первом случае имеют более высокую точность, чем таковые во втором случае.
В устройстве, согласно фиг.1, таким образом, повышенная точность вторых сигнальных выходов 552 и 752 достигается в диапазоне заранее установленного диапазона частот вращения за счет того, что эти сигнальные выходы со своим находящимся в распоряжении выходным диапазоном сигнала представляют и должны выдавать только частичный диапазон рабочего диапазона частоты вращения. Выдаваемые со вторых сигнальных выходов 552, 752 сигналы могут применяться, например, для точного и/или быстрого регулирования турбины.
Посредством вычислительного блока 53 первого подустройства 5 и вычислительного блока 73 подустройства 7 можно легко устанавливать, является ли один из выходных сигналов 11 датчиков 9 частоты вращения ошибочным. Для этого в каждом подустройстве 5, 7 сравнивают между собой приложенные на сигнальных входах 51 или 71 выходные сигналы 11 датчиков 9 частоты вращения и устанавливают, отклоняется ли одно значение от двух других значений. Если это имеет место, то отклоняющееся значение не привлекается вычислительным блоком 53 или 73 для вычисления частоты вращения вращающейся детали 3 машины. Согласно изобретению в устройстве 1, следовательно, в каждом подустройстве 5, 7 реализована избыточная, так называемая "два из трех" - регистрация и оценка выходных сигналов 11 датчиков 9 частоты вращения. Таким образом, ошибка одного их выходных сигналов 11 может допускаться без потери функции контроля подустройств 5, 7.
Наряду с этой избыточностью по каналам относительно регистрации выходных сигналов 11 датчиков 9 частоты вращения согласно изобретению в устройстве 1 реализована, кроме того, так называемая готовность "одно из двух" - относительно параллельно расположенных подустройств 5, 7.
Это означает, что для выполнения функции контроля частоты вращения согласно изобретению устройства 1 достаточной является безошибочность одного из подустройств 5, 7. В нормальном режиме работы одно из подустройств 5, 7 берет на себя задачу главного подустройства так, что это подустройство берет на себя функцию контроля согласно изобретению устройства 1. Для того чтобы в случае ошибки могло происходить автоматическое переключение от ошибочного подустройства, которое работает в качестве главного, на безошибочное подустройство, которое работает в качестве подчиненного, оба подустройства 5, 7 содержат по контрольному блоку 57 или 77. Между обоими подустройствами 5, 7 производится обмен данными, в частности, посредством контрольных блоков 57 и 77.
Если во время режима работы вращающейся детали 3 машины работающее в настоящий момент в качестве главного подустройства 5, 7 имеет ошибку - это может быть определено, например, посредством реализованной в контрольном блоке 57, 77 тестовой программы - то это сообщается на другое подустройство 5, 7, которое после этого берет на себя функцию в качестве нового главного подустройства, до сих пор; работавшего в качестве главного. В качестве выходных сигналов 100, 200 устройства, согласно изобретению, таким образом, используются предпочтительно или значения сигнальных выходов подустройства, безошибочно работающего в качестве главного, или значения сигнальных выходов того подустройства, которое в случае ошибки берет на себя функцию прежнего главного подустройства. Выбор значений правильных в этом смысле сигнальных выходов для выдачи в качестве выходных сигналов 100, 200 указанного устройства 1 может при этом происходить, например, посредством, по меньшей мере, одного из контрольных блоков 57, 77.
В случае если вследствие ошибки функция прежнего главного переходит на другое подустройство, то ошибочно работающее подустройство может ремонтироваться без необходимости вывода из эксплуатации контроля частоты вращения.
Фиг.2 показывает следующее устройство, согласно изобретению. Устройство для определения частоты вращения вращающейся детали машины содержит, по меньшей мере, два измерительных канала 20 и 22, причем каждый из них состоит из приемника 24 сигналов, по меньшей мере, от трех датчиков 26 частоты вращения, вычислительный блок 28 частоты вращения, устройство 30 для формирования выходных сигналов и шину 32 данных. Причем один из выходов устройства служит в качестве выхода для действительной частоты вращения, а другой - в качестве выхода для действительной частоты вращения, значения которой лежат в заранее заданном диапазоне частоты вращения детали, по существу, турбины, который соответствует номинальной частоте вращения в нормальном режиме работы. При этом соответствующие друг другу выходы измерительных каналов (20, 22) объединены, и в каждом канале (20, 22) встроен анализатор для превышения заранее заданного максимального временного изменения частоты вращения, который формирует управляющее воздействие для выдачи выходного сигнала из одного из каналов.
Устройство выполнено на основе процессора 34, который в соответствии с загруженной в его запоминающем устройстве программой функционирует, как описано ниже.
По меньшей мере по одному из выходных сигналов одного из датчиков 26 вычислительный блок 28 процессора вычисляет частоту вращения вращающейся детали машины.
Входы приемника 24 сигнала обоих каналов включены параллельно к выходному сигналу одного из датчиков 26 частоты вращения. Каждый канал формирует на выходе из двух сигналов действительную частоту вращения, значение которой лежит в заранее установленном диапазоне частоты вращения, а также сигнал временного изменения частоты вращения. Вычислительный блок устанавливает также превышение заранее установленного временного максимально допустимого изменения частоты вращения и передает на выходе сигнал о превышении допустимого временного изменения частоты вращения.
Мажоритарные элементы, принадлежащие к компонентам процессора 34, устанавливают, является ли ошибочным, по меньшей мере, один из подключенных к соответствующим входам выходных сигналов датчика 26 частоты вращения.
Каналы могут обмениваться между собой данными, причем данные содержат такие субданные, которые могут служить для того, чтобы устанавливать работоспособность одного из каналов. При этом при работоспособности обоих каналов применяется преимущественно первый канал. Второй канал используется для контроля тогда, когда первый канал является неработоспособным.
Устройство, согласно фиг.2, резюмируя, может быть представлено следующим образом.
Устройство для контроля частоты вращения вращающейся детали машины содержит два измерительных канала 20 и 22, причем каждый из них состоит из приемника 24 сигналов, по меньшей мере, от трех датчиков 26 частоты вращения, вычислительный блок 28 частоты вращения, устройство 30 для формирования выходных сигналов с двумя выходами, а также шину 32 данных. Причем один из выходов устройства служит в качестве выхода для действительной частоты вращения, а другой в качестве выхода для действительной частоты вращения, значения которой лежат в заранее заданном диапазоне частоты вращения детали, по существу, турбины, который соответствует номинальной частоте вращения в нормальном режиме работы. При этом соответствующие друг другу выходы измерительных каналов (20, 22) объединены, и в каждом канале (20, 22) встроен анализатор для превышения заранее заданного максимального временного изменения частоты вращения, который формирует управляющее воздействие для выдачи выходного сигнала из одного из каналов.
Устройство выполнено на основе процессора 34, который функционирует в соответствии с программой, загруженной в его запоминающее устройство, следующим образом.
По меньшей мере по одному из выходных сигналов от одного из датчиков 26 вычислительный блок 28 процессора вычисляет частоту вращения вращающейся детали машины.
Входы приемника 24 сигналов обоих каналов включены параллельно относительно выходного сигнала одного из датчиков 26 частоты вращения. Каждый канал формирует на выходе из двух сигналов действительную частоту вращения, значение которой лежит в заранее установленном диапазоне частоты вращения, а также сигнал о временном изменении частоты вращения. Вычислительный блок 28 устанавливает также превышение заранее заданного временного максимально допустимого изменения частоты вращения и передает на выходе сигнал о превышении допустимого временного изменения частоты вращения.
Мажоритарные элементы, принадлежащие к компонентам вычислительного блока, устанавливают, является ли ошибочным, по меньшей мере, один из подключенных к соответствующим входам выходных сигналов датчика частоты вращения.
Каналы могут обмениваться между собой данными, причем данные содержат такие субданные, которые могут служить для того, чтобы устанавливать работоспособность одного из каналов. При этом при работоспособности обоих каналов применяется преимущественно первый канал. Второй канал используется для контроля тогда, когда первый канал является неработоспособным.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ВРАЩАЮЩЕЙСЯ ДЕТАЛИ МАШИНЫ | 2003 |
|
RU2313099C2 |
| ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО АВИАДВИГАТЕЛЯ | 2010 |
|
RU2428699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ТУРБИНЫ, ПОДКЛЮЧЕННОЙ ПОСРЕДСТВОМ ГЕНЕРАТОРА К ЭЛЕКТРИЧЕСКОЙ СЕТИ ЭНЕРГОСНАБЖЕНИЯ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2298653C2 |
| ДАТЧИК ВРАЩАЮЩЕЙСЯ МАШИНЫ | 2008 |
|
RU2478914C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ РОТОРА | 2012 |
|
RU2586395C2 |
| СПОСОБЫ И СИСТЕМЫ ИДЕНТИФИКАЦИИ ДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ | 2022 |
|
RU2813471C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ПОЛОТНЕ | 1992 |
|
RU2068040C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ ВРАЩАЮЩИХСЯ МАШИН | 2007 |
|
RU2449454C2 |
| СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ ЗАЗОРА | 2006 |
|
RU2358238C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2003 |
|
RU2323512C2 |
Изобретение относится к области измерительной техники и может быть использовано для контроля частоты вращения рабочего колеса турбины. В устройстве согласно изобретению предусмотрены два параллельно расположенных подустройства, которые для достижения избыточной регистрации двух из трех сигналов частоты вращения имеют три сигнальных входа. Каждое из подустройств содержит вычислительный блок, с помощью которого вычисляется частота вращения вращающейся детали машины. Кроме того, каждое из подустройств имеет сигнальный выход для выдачи вычисленной соответствующим вычислительным блоком частоты вращения. Соответствующие друг другу сигнальные входы подустройств нагружены параллельно выходным сигналом датчика частоты вращения. В случае ошибки функция устройства, согласно изобретению, может быть полностью принята на себя одним из подустройств так, что допускаются как ошибочный выходной сигнал датчика частоты вращения, так и отказ одного подустройства.. Изобретение обеспечивает повышение надежности контроля. 2 н. и 21 з.п. ф-лы, 2 ил.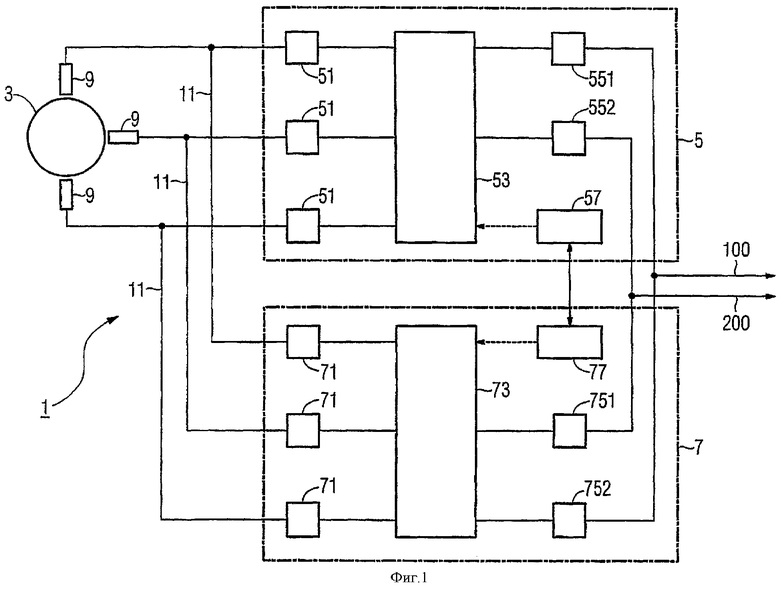
по меньшей мере три сигнальных входа (51, 71), к каждому из которых подведен выходной сигнал (11) датчика (9) частоты вращения,
вычислительный блок (53, 73), посредством которого из по меньшей мере одного из выходных сигналов (11) одного из датчиков (9) частоты вращения, является вычисляемой по меньшей мере частота вращения вращающейся детали (3) машины, и
по меньшей мере один сигнальный выход для выдачи вычисленной вычислительным блоком частоты вращения, и причем соответствующие друг другу сигнальные входы (51, 71) подустройств (5, 7) параллельно нагружены каждый выходным сигналом (11) одного из датчиков частоты вращения.
| US 4035624 A, 12.07.1977 | |||
| US 5067080 A, 19.11.1991 | |||
| US 4464577 A, 07.08.1984 | |||
| Устройство для мажоритарного выбора сигналов | 1986 |
|
SU1325485A1 |

