Изобретение относится к устройству, посредством которого является определяемой частота вращения вращающейся детали машины, в частности рабочего колеса турбины.
Устройство для определения частоты вращения вращающейся детали машины относится к технической области измерительной техники: она служит для контроля, например, частоты вращения вала турбины и может использоваться в системах для регулирования частоты вращения вала турбины.
Во многих областях техники встречаются машины, которые для выполнения своих соответствующих задач содержат, по меньшей мере, одну вращающуюся деталь машины.
Например, турбины для выработки электрической энергии, например газовые и паровые турбины, содержат рабочие колеса, которые преобразуют содержащуюся в рабочей среде турбины энергию в энергию вращения так, что посредством связанного с турбиной генератора может производиться электрическая энергия.
Частота произведенного подобным генератором электрического переменного напряжения непосредственно зависит от частоты вращения (числа оборотов) подключенной турбины.
Для обеспечения надежности снабжения электрической сети энергоснабжения является необходимым поддерживать частоту сети постоянной на желаемом значении (в Европе, например, на 50 Гц).
Возможные проблемы сети отражаются, между прочим, в мгновенной действительной частоте сети, отклоняющейся от желаемой частоты сети.
Например, мгновенно имеющаяся частота сети падает, если предоставленная в распоряжение сетью энергоснабжения мощность не достаточна, чтобы удовлетворить мгновенный спрос мощности от потребителей, которые подключены к сети энергоснабжения. В подобном случае вследствие перегрузки частота вращения одной или нескольких турбин сети энергоснабжения более или менее сильно понижается.
Чтобы иметь возможность распознавания подобных колебаний частоты вращения турбины и/или реализации регулирования частоты вращения во время эксплуатации турбины, необходимо определение частоты вращения.
Известным является устройство для определения частоты вращения тела (DE 3425472, класс G01P 3/481, 1986), которое содержит датчик частоты вращения, в котором подсчитываются импульсы внутри определенного временного периода и контролируется, является ли определенное значение равным или больше, чем значение, которое задано для вычисления частоты вращения. При положительном результате проверки численное значение направляют для последующей обработки.
Наиболее близким к настоящему изобретению является датчик сигнала для предельных значений частоты вращения (авторское свидетельство СССР №1877639, класс G01P 3/48, 1991), которое содержит датчик частоты вращения и устройство сравнения, которое контролирует, лежит ли частота вращения вне рабочего диапазона, причем оно в случаях, в которых частота вращения отличается от рабочего диапазона, формирует сигнал о превышении или понижении частоты.
Этот датчик сигнала, однако, не может контролировать скорость, с которой изменяется частота вращения, так как он не может диагностировать состояние измерительного канала.
В основе настоящего изобретения лежит поэтому задача создания устройства для определения частоты вращения вращающейся детали машины, которое надежно работает и является реализуемым с малыми затратами.
Эта задача согласно изобретению решается посредством устройства для определения частоты вращения вращающейся детали машины, содержащей следующие компоненты:
- по меньшей мере, один сигнальный вход, к которому является подводимым выходной сигнал датчика частоты вращения,
- вычислительный блок, посредством которого из выходного сигнала датчика частоты вращения является вычисляемой, по меньшей мере, частота вращения вращающейся детали машины, и,
- по меньшей мере, два сигнальных выхода для выдачи вычисленной вычислительным блоком частоты вращения, причем посредством первого из, по меньшей мере, двух сигнальных выходов является выдаваемой каждая актуальная частота вращения и причем посредством второго из, по меньшей мере, двух сигнальных выходов являются выдаваемыми только такие актуальные частоты вращения, значения которых содержатся в заданном диапазоне частот вращения, который является истинным подмножеством действительного рабочего диапазона частоты вращения вращающейся детали машины.
Посредством датчика частоты вращения определяют частоту вращения вращающейся детали машины, в частности рабочего колеса турбины, регистрируют и подводят к сигнальному входу устройства согласно изобретению.
Вычислительный блок преобразует приложенное на сигнальном входе значение в частоту вращения вращающейся детали машины, причем в соответствии с видом примененного датчика частоты вращения, а также его выходного сигнала в вычислительном блоке к выполнению приходит соответствующая программа вычислений.
Например, по длине окружности рабочего колеса турбины могут быть расположены на одинаковых расстояниях маркеры или зубцы, которые детектируют и подсчитывают оптическим или индуктивным датчиком частоты вращения. Если теперь известно, сколько маркеров соответствуют одному обороту рабочего колеса, то вместе с необходимым для одного обращения временем посредством вычислительного блока можно легко вычислить актуальную частоту вращения.
Первый из, по меньшей мере, двух сигнальных выходов выдает в любой момент времени эксплуатации актуальную частоту вращения вращающейся детали машины независимо от того, вводится ли как раз вращающаяся деталь машины в работу и имеет низкую частоту вращения или находится в режиме с нормальной частотой вращения или даже в режиме с частотой вращения выше номинальной. Посредством первого из, по меньшей мере, двух сигнальных выходов следовательно в каждом случае эксплуатации в распоряжение предоставляется актуальная частота вращения вращающейся детали машины, например, для индикации частоты вращения и/или дальнейшей обработки, например, посредством регулятора турбины.
Так как сигнальный выход в общем может представлять свои соответствующие выходные значения сигнала только с ограниченной точностью, актуально приложенные выходные значения сигнала являются тем более неточными, чем больше диапазон выходных значений сигнала, который должен представляться посредством сигнального выхода.
Для получения в желаемом рабочем диапазоне частоты вращения сигнала, который содержит только частичный диапазон действительного рабочего диапазона частоты вращения возможно точного значения для актуально имеющейся частоты вращения вращающейся детали машины в устройстве, согласно изобретению предусмотрен второй из, по меньшей мере, двух сигнальных выходов.
Желаемый рабочий диапазон частоты вращения предпочтительно охватывает номинальную частоту вращения вращающейся детали машины, с которой вращающаяся деталь машины вращается в нормальном режиме работы.
Так как посредством второго из, по меньшей мере, двух сигнальных выходов должен быть представимым только частичный диапазон действительно возможного диапазона частот вращения, точность, с которой значение частоты вращения из названного частичного диапазона, является более высокой по сравнению с точностью, с которой являются представимыми посредством первого из обоих сигнальных выходов соответствующие значения частоты вращения из всего диапазона частот вращения.
Названная повышенная точность представления и выдачи может, например, использоваться, чтобы реализовать в области номинальной частоты вращения (если она охвачена названным частичным диапазоном) очень точное регулирование частоты вращения вращающейся детали машины посредством регулятора частоты вращения.
В случае турбины ее нормальный режим работы с номинальной частотой вращения может особенно хорошо поддерживаться посредством турбинного регулятора, так как турбинным регулятором может быть очень точно предоставлено в распоряжение, по меньшей мере, необходимое измеренное значение актуальной частоты вращения посредством второго из, по меньшей мере, двух сигнальных выходов так, что могут быстро и точно отработаны, в частности, отклонения от желательной номинальной частоты вращения.
Предпочтительно выходной сигнал датчика частоты вращения является импульсным сигналом, а сигнальный вход импульсным входом для регистрации импульсов, в частности импульсов напряжения, предпочтительно с частотой 60-3000 Гц.
В этой форме выполнения частоту вращения вращающейся детали машины определяют по частоте импульсов, которые выдаются датчиком частоты вращения и считываются с сигнального входа.
Например, рабочее колесо турбины по длине своей окружности может быть снабжено множеством зубцов, которые проходят мимо установленного близко к рабочему колесу датчика частоты вращения, регистрируются им, например, посредством индуцированного зубцами в датчике частоты вращения напряжения и подсчитываются. Так как между зубцами находится соответственно промежуток, то выдаваемый подобным датчиком частоты вращения сигнал является импульсным и может обрабатываться импульсным входом, который выполнен с возможностью регистрации импульсов, в частности импульсов напряжения. Предпочтительная частота импульсного сигнала лежит при этом в диапазоне 60-3000 Гц, что соответствует обычному диапазону частот при регистрации частоты вращения рабочего колеса турбины посредством импульсного датчика частоты вращения.
В особенно предпочтительной форме выполнения изобретения устройство содержит, по меньшей мере, три сигнальных входа, к которым соответственно может подводиться выходной сигнал одного из, по меньшей мере, трех датчиков частоты вращения, причем посредством вычислительного блока может определяться, является ли один из выходных сигналов ошибочным.
В этой форме выполнения изобретения частота вращения регистрируется с избыточностью посредством, по меньшей мере, трех датчиков частоты вращения в так называемом "режиме два из трех" так, что может допускаться ошибка или выход из строя одного из трех датчиков частоты вращения.
Для этого, по меньшей мере, три выходных сигнала сравнивают между собой посредством вычислительного блока и определяют, при необходимости, имеющееся отклонение одного из выходных сигналов от, по меньшей мере, обоих других выходных сигналов. Ошибочно имеющийся выходной сигнал тогда не привлекается вычислительным блоком для определения частоты вращения; актуальная частота вращения может быть определена из, по меньшей мере, одного из совпадающих выходных сигналов. В этой форме выполнения надежность того, что определенная частота вращения является корректной, особенно высока, так как выход из строя или ошибка одного из датчиков частоты вращения не приводит к неправильному или не могущему быть определимым результату.
Предпочтительно вычислительным блоком можно вычислять временное изменение частоты вращения и выдавать с помощью третьего сигнального выхода вычисленное временное изменение частоты вращения.
При этом посредством вычислительного блока из предыстории, по меньшей мере, двух, в частности актуального и отстоящего на краткое время назад значения частоты вращения, вычисляют временное изменение частоты вращения. Для этого должны только иметься в распоряжении средства для запоминания вычисленных значений частоты вращения и должен быть известен временной интервал между, по меньшей мере, двумя запомненными значениями частоты вращения или между актуальным значением частоты вращения и, по меньшей мере, одним запомненным значением частоты вращения.
Из этой определенной скорости изменения частоты вращения можно получить другую информацию о рабочем состоянии вращающейся детали машины. Из временного изменения частоты вращения, равного нулю, можно, например, сделать вывод о том, что имеет место стабильный режим работы и что не должны предприниматься никакие действия.
Снижение частоты вращения в течение определенного промежутка времени в противоположность этому указывает на измененную нагрузку, что обычно делает необходимым вмешательство в режим работы так, чтобы частота вращения, в частности в случае турбины, по возможности лучше соответствовала желаемой номинальной частоте вращения. В последнем случае тогда при повышении нагрузки, например, должна повышаться подача рабочей среды на турбину, например пара, чтобы также в настоящем случае повышения нагрузки иметь возможность поддерживать желаемую номинальную частоту вращения.
Если частота вращения в течение определенного промежутка времени повысилась, то это указывает, например, на уменьшенную нагрузку, что также в большинстве случаев делает необходимым вмешательство в режим работы. В случае турбины подобные превышения номинальной частоты вращения появляются, например, тогда, когда от сети энергоснабжения внезапно отключается большая нагрузка. Турбина тогда склонна к тому, чтобы "идти вразнос" и вращаться с сильно повышенной частотой вращения. Это может приводить к опасности для стабильности работы машины, а также к опасности для людей и окружающей среды.
Посредством этой формы выполнения изобретения можно надежно распознавать временные изменения частоты вращения, которые часто требуют вмешательства в работу, чтобы снова восстановить желаемый нормальный режим работы.
Предпочтительно при этом может детектироваться посредством вычислительного блока превышение заданного максимального временного изменения частоты вращения и выдаваться соответствующий выходной сигнал посредством четвертого, в частности цифрового сигнального выхода.
Заданное максимальное временное изменение частоты вращения является мерой того, в пределах каких границ являются допустимыми временные изменения частоты вращения. Так как и во время нормального режима работы могут появляться колебания частоты вращения без необходимости вмешательства в режим работы, посредством этой формы выполнения может быть обеспечено, что вмешательство в режим работы влекут за собой только такие временные изменения частоты вращения, которые превышают заданное максимальное временное изменение частоты вращения. Как только эта максимальная скорость изменения частоты вращения превышена, это сообщается с помощью соответствующего сигнального выхода, например, в виде двоичного предупредительного сигнала.
Предпочтительно посредством, по меньшей мере, одного из сигнальных выходов соответствующий выходной сигнал может быть в виде электрического напряжения.
Электрические напряжения могут обрабатываться особенно хорошо, например, посредством электронных схем. Кроме того, как аналоговые, так и цифровые сигналы могут быть представлены посредством электрических напряжений. Диапазон значений аналогового сигнала может, например, накладываться на диапазон напряжения, и состояние цифрового сигнала может представляться с помощью соответственно присвоенного постоянного значения напряжения.
Обработка кодированных посредством электрического напряжения сигналов является широко распространенной, в частности в управлениях с программированием от запоминающего устройства (SPS).
В названной последней форме выполнения электрическое напряжение предпочтительно имеет значение 0-10 В.
Для подобного диапазона напряжения имеется ряд так называемых плат аналогового вывода для управлений с программированием от ЗУ, которые без особых подгонок могут быть использованы в случае изобретения.
В другой предпочтительной форме выполнения изобретения действительный рабочий диапазон частоты вращения вращающейся детали машины охватывает диапазон 0 - порядка 4000 об/мин. Подобный действительный рабочий диапазон частоты вращения является особенно типичным для рабочего диапазона частоты вращения турбин для производства электрической энергии.
В связи с этой формой выполнения заданный диапазон частоты вращения охватывает, в частности соответствует (в качестве частичного диапазона действительного рабочего диапазона частоты вращения), диапазону 2900 - порядка 3100 об/мин.
Подобный заданный диапазон частоты вращения охватывает номинальную частоту вращения очень многих турбин для производства электрической энергии так, что вычисленные с помощью второго из, по меньшей мере, двух сигнальных выходов частоты вращения очень точно могут выдаваться в диапазоне номинальной частоты вращения.
Предпочтительно устройство выполнено с возможностью цифровой и цикличной обработки поступающих сигналов, причем длительность цикла лежит практически в интервале 4-10 мс, в частности 6-8 мс.
Известные средства управления с программированием от ЗУ обрабатывают сигналы в цифровой форме и циклично. Длительность цикла, с которой обрабатываются сигналы определенных функций управления с программированием от ЗУ, например, зависит от скорости вычислений модуля управления с программированием от ЗУ, посредством которого реализована соответствующая функция. Особенно подходящая длительность цикла, которая позволяет достаточно быструю регистрацию и выдачу частоты вращения, при этом лежит в диапазоне примерно 4-10 мс, в частности 6-8 мс.
В следующей предпочтительной форме выполнения изобретения, по меньшей мере, часть сигнальных выходов и/или часть выходных сигналов датчиков частоты вращения может передаваться посредством шины данных от устройства или к устройству.
Системы шин для передачи данных являются известными, в частности в области уже упомянутых устройств управления с программированием от ЗУ. При этом различные сигналы передаются не через соответственно отдельные соединения, а по общему соединению, так называемой шине данных.
Таким образом, в частности, являются уменьшенными расходы на монтаж между пользователями дистанционной связи, так как между ними не нужно прокладывать отдельные линии.
На решение поставленной изобретению задачи, в частности относительно желаемой способности диагностики, кроме того, направлено следующее устройство:
Это устройство для определения частоты вращения вращающейся детали машины содержит преобразователь для входного сигнала, который подключен к выходу одного из датчиков частоты вращения, причем один из выходов устройства служит в качестве выхода для текущей частоты вращения; процессор, входы которого связаны с выходами, по меньшей мере, одного преобразователя входного сигнала и который на втором выходе устройства выдает частоту вращения, значения которой лежат в заданном диапазоне частоты вращения турбины, который соответствует номинальной частоте вращения при нормальном режиме работы, причем выходной сигнал датчика является импульсным сигналом и процессор с помощью, по меньшей мере, трех выходных сигналов преобразователя входного сигнала определяет ошибочный сигнал и причем выход для частоты вращения, значения которой лежат в заданном диапазоне частоты вращения турбины, имеет меньшее время считывания (шаг квантования), чем выход для действительной частоты вращения.
Кроме того, процессор формирует дополнительно на третьем выходе устройства сигнал для скорости временного изменения частоты вращения и на четвертом выходе - сигнал для превышения заданного временного изменения частоты вращения, причем на выходе процессора могут формироваться сигналы в виде напряжения или, соответственно, цифровые сигналы; по меньшей мере, часть сигналов с выходов процессора и/или часть выходных сигналов с датчиков частоты вращения может передаваться через шину данных.
В последующем два примера выполнения изобретения представлены более подробно.
При этом показывают
Фиг.1 - соответствующее изобретению устройство для определения частоты вращения детали машины, причем частота вращения определена с избыточностью,
Фиг.2 - другое соответствующее изобретению устройство.
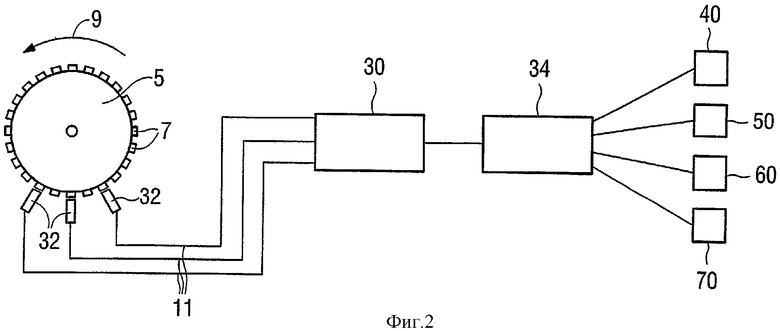
Фигура 1 показывает соответствующее изобретению устройство 1, посредством которого можно определять частоту вращения вращающейся детали 5 машины, в частности рабочего колеса турбины.
Вращающаяся деталь 5 машины выполнена, например, в виде рабочего колеса турбины, которое по длине своей окружности содержит множество зубцов 7. Три датчика 10 частоты вращения расположены в непосредственной близи к окружности, образованной наружными кромками зубцов. На фиг.1 три датчика частоты вращения расположены предпочтительно в плоскости поперечного сечения вращающейся детали 5 машины, однако они могут быть также расположены в плоскости продольного сечения относительно фиг.1, предпочтительно в направлении в плоскость чертежа друг под другом. Если вращающаяся деталь 5 машины движется, например, в направлении 9 вращения, то зубцы 7 проходят мимо датчиков 10 частоты вращения и индуцируют там, например, импульсы напряжения.
Выходные сигналы 11 датчиков 10 частоты вращения включены на соответственно приданный в соответствие сигнальный вход 13 устройства 1. Они выполнены предпочтительно в виде импульсных входов, если выходные сигналы 11 датчиков 10 частоты вращения являются импульсами напряжения.
Сигнальные входы 13 связаны с вычислительным блоком 20. Вычислительный блок 20 может содержать датчик 22 времени так, что можно подсчитывать количество зубцов 7, которые в течение определенного времени проходят мимо каждого из датчиков 10 частоты вращения. Из подсчитанного в течение этого промежутка времени количества зубцов затем посредством вычислительного блока 20 простым образом можно определить текущую частоту вращения. В случае отсутствия ошибок всех трех датчиков 10 частоты вращения, а также соответствующих выходных сигналов 11 для этого является достаточной оценка одного выходного сигнала 11.
Если теперь один из выходных сигналов 11 датчиков 10 частоты вращения является ошибочным, то количество подсчитанных в течение этого промежутка времени зубцов относительно ошибочного датчика 10 частоты вращения отличается от соответствующего количества, которое зарегистрировано в том же промежутке времени двумя другими датчиками частоты вращения. Поэтому для установления возможно имеющейся ошибки одного датчика частоты вращения производится сравнение прилегающих на сигнальных входах 13 сигналов посредством вычислительного блока 20. Если один из выходных сигналов 11 отличается от обоих других выходных сигналов, то он не привлекается для определения частоты вращения. Отказ одного из датчиков частоты вращения тем самым может обнаруживаться посредством устройства 1 согласно изобретению и является допустимым без того, чтобы подобная ошибка препятствовала корректному вычислению частоты вращения.
Вычислительный блок 20 содержит далее предпочтительно накопитель 23, в котором может запоминаться предыстория значений вычисленных частот вращения. Путем сравнения, по меньшей мере, двух из этих значений предыстории или путем сравнения актуально вычисленного значения частоты вращения с, по меньшей мере, одним запомненным значением предыстории частоты вращения посредством вычислительного блока 20 может быть вычислено простым образом временное изменение частоты вращения, если вместе со значениями предыстории частоты вращения запоминается соответствующий момент времени измерения так, что известен временной промежуток между, по меньшей мере, двумя запомненными значениями предыстории частоты вращения или между текущим значением частоты вращения и, по меньшей мере, одним историческим запомненным значением частоты вращения. Необходимый для этого временной сигнал может поставляться, например, датчиком 22 времени и откладываться вместе с подлежащими запоминанию значениями частоты вращения в накопителе 23.
Временное изменение частоты вращения может выдаваться вычислительным блоком 20 посредством сигнального выхода 29. Временное изменение частоты вращения является мерой того, находится ли вращающаяся деталь 5 машины в стабильном рабочем состоянии или, при известных обстоятельствах, необходимо вмешательство в режим работы.
Далее, максимальное временное изменение частоты вращения может задаваться и запоминаться, например, в накопителе 23. Если теперь вычислительный блок 20 установит, что заданное максимальное временное изменение частоты вращения является превышенным, то есть приложенное на сигнальном выходе 29 значение превышает это заданное максимальное значение, то посредством сигнального выхода 27 можно сигнализировать об этом превышении, например, посредством цифрового сигнала.
Дальнейшими существенными элементами заявленного устройства 1 являются, по меньшей мере, два сигнальных выхода 25, посредством которых может выдаваться вычисленная вычислительным блоком 20 частота вращения.
При этом на первом сигнальном выходе 251 из, по меньшей мере, двух сигнальных выходов 25 в каждом рабочем случае соответственно имеется в качестве выходного сигнала текущая, вычисленная вычислительным блоком 20 частота вращения, в то время как на втором сигнальном выходе 252 из, по меньшей мере, двух сигнальных выходов 25 выдаются только такие актуальные частоты вращения, которые лежат в частичном диапазоне диапазона всех возможных, реализуемых вращающейся деталью 5 машины частот вращения.
Предпочтительно этот частичный диапазон охватывает номинальную частоту вращения, на которую рассчитана вращающаяся деталь 5 машины.
Второй сигнальный выход 252 имеет, следовательно, по сравнению с первым сигнальным выходом 251 ограниченно представляемый диапазон выходных значений для выдачи частоты вращения.
Так как, однако, точность, с которой могут представляться текущие выходные значения сигнала, является зависимой от величины диапазона, который должен представляться посредством сигнального выхода, второй сигнальный выход 252 имеет, в общем, для представляемого им, ограниченного по сравнению с первым сигнальным выходом 251 выходного диапазона сигнала, более высокую точность.
В случае цифровых вычислительных машин является, например, известным кодировать аналоговые значения 16 битами. При этом относительно точности кодированного значения получается различие, подлежит ли кодированию посредством этих названных в качестве примера 16 бит, например, малый диапазон значений 0-10 или значительно больший диапазон значений 0-100000. Получающийся в первом случае порог квантования по величине несколько меньше, чем порог квантования, получающийся во втором случае, так, что кодированные значения в первом случае имеют более высокую точность, чем таковые второго случая.
В соответствующем изобретению устройстве эта возможность достижения повышенной точности выдаваемых посредством второго сигнального выхода 252 значений частоты вращения используется за счет того, что представляемый посредством второго сигнального выхода 252 диапазон частот вращения является ограниченным по сравнению с диапазоном частот вращения, который должен представляться первым сигнальным выходом 251; выдаваемые со второго сигнального выхода 252 значения частоты вращения вследствие их более высокой точности являются применимыми, например, для точного и/или быстрого регулирования турбины посредством регулятора турбины.
Фиг.2 показывает вариант следующего соответствующего изобретению устройства для определения частоты вращения вращающейся детали машины.
Устройство для определения частоты вращения вращающейся детали машины содержит, по меньшей мере, один преобразователь 30 входного сигнала, который подключен, по меньшей мере, к одному из трех датчиков 32 частоты вращения и к процессору 34, который формирует на одном из выходов 40 действительную частоту вращения и на другом выходе 50 только такие действительные частоты вращения, значения которых лежат в заданном диапазоне частот вращения; на третьем выходе 60 формируется временное изменение частоты вращения, на четвертом выходе 70 сигнал превышения заданного временного изменения частоты вращения.
Это устройство для определения частоты вращения вращающейся детали машины функционирует, как описано ниже.
Процессор 34 выполнен так, что он может функционировать соответственно загруженной в его накопителе программе и предназначен для того, чтобы передавать действительную частоту вращения с помощью сигналов, по меньшей мере, трех датчиков частоты вращения и сигнал о тенденции ее изменения.
Выходной сигнал, по меньшей мере, одного из датчиков 32 частоты вращения присутствует в виде импульсного сигнала, который процессор использует для того, чтобы вычислить действительную частоту вращения вращающейся детали машины, частоту вращения, значение которой лежит в заданном диапазоне частот вращения. Эта акция может проводиться посредством устройства с двумя пороговыми значениями, которое пропускает к выходу только сигналы, которые лежат между двумя пороговыми значениями. Эти сигналы представляют ограниченный диапазон с повышенным масштабом по сравнению с первым выходом 40.
Так как точность, с которой могут представляться действительные значения выходных сигналов, зависит от ширины диапазона, второй сигнальный выход 50 имеет более высокую точность вследствие ограниченного по сравнению с первым выходом 40 диапазона сигнала.
Процессор вычисляет также временное изменение частоты вращения и передает вычисленное значение к третьему выходу 60 устройства.
Посредством порогового элемента процессор распознает также превышение заданного максимального временного изменения частоты вращения и передает соответствующий сигнал через четвертый цифровой выход 70.
Сигнал на выходах может формироваться как в виде аналогового, так и в виде цифрового сигнала.
Выходные сигналы или часть выходных сигналов устройства, а также выходные сигналы датчиков частоты вращения могут передаваться по шине данных от устройства или к устройству.
Преимущества предложенного устройства по сравнению с известными состоят в том, что оно может контролировать, не является ли один из выходных сигналов ошибочным.
Кроме того, один из выходов устройства передает ограниченный диапазон частот вращения, за счет чего может быть повышена точность измерения, которая зависит от ширины подлежащего измерению диапазона частоты, так как время считывания (шаг квантования) является меньше.
Устройство передает также сигнал о скорости, с которой изменяется частота вращения, при превышении допустимого значения выдается сигнал об опасной ситуации.
Резюмируя соответствующее изобретению устройство согласно фиг.2 может быть описано следующим образом:
Изобретение направлено на то, чтобы расширить функциональные возможности устройства за счет обеспечения измерения скорости, с которой изменяется частота вращения, то есть диагностируется состояние измерительного канала.
Устройство выполнено на основе процессора 34, который функционирует в соответствии с загруженной в его накопителе программой и который передает на выходе действительную частоту вращения с помощью сигналов, приходящих, по меньшей мере, от трех датчиков частоты вращения, а также сигнала о ее изменении; он вычисляет также действительную частоту вращения вращающейся детали машины, значения которой лежат в заданном диапазоне частоты вращения. Эта акция может проводиться с помощью устройства с двумя пороговыми значениями, которое пропускает на выход только сигналы, которые лежат между двумя пороговыми значениями. По сравнению с первым выходом 40 эти сигналы представляют ограниченный диапазон с повышенным масштабом, то есть по сравнению с первым выходом 40 вследствие ограниченного диапазона сигнала они имеют более высокую точность.
Процессор вычисляет также временное изменение частоты вращения и передает вычисленное значение к третьему выходу 60 устройства.
Посредством порогового элемента процессор распознает также превышение заданного максимального временного изменения частоты вращения и передает соответствующий сигнал через четвертый цифровой выход 70.
Изобретение относится к измерительной технике и может быть использовано в системах контроля скорости вращения, например, рабочего вала турбины. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит, по меньшей мере, один сигнальный вход, к которому подводится выходной сигнал датчика частоты вращения, а также вычислительный блок, посредством которого из выходного сигнала датчика частоты вращения формируются актуальные значения частоты вращения вращающейся детали машины. При этом посредством первого из, по меньшей мере, двух сигнальных выходов формируются только такие актуальные частоты вращения, значения которых содержатся в заданном диапазоне частоты вращения, который является истинным подмножеством действительного рабочего диапазона частоты вращения вращающейся детали машины. 2 н. и 16 з.п. ф-лы, 2 ил.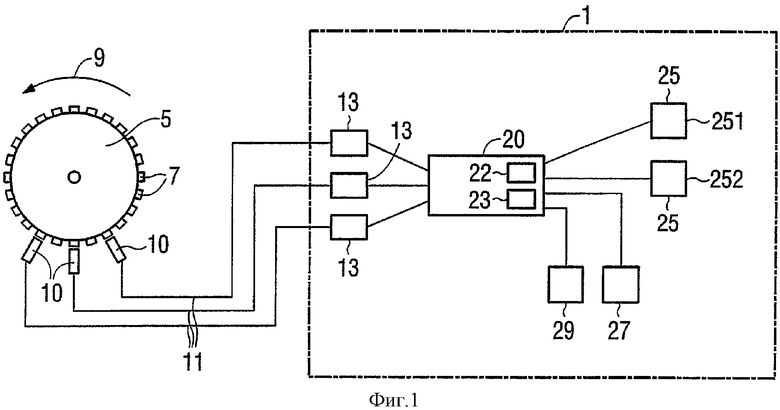
| ЭЛЕКТРОННЫЙ МОДУЛЬ УПРАВЛЕНИЯ | 1992 |
|
RU2082016C1 |
| JP 59039907 A, 05.03.1984 | |||
| US 4035624 A, 12.07.1977 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1992 |
|
RU2094354C1 |
| Электронный тахометр | 1990 |
|
SU1737344A1 |
| DE 19545520 A, 13.06.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА НА ЧАСТОТУ ВРАЩЕНИЯ РОТОРА | 1988 |
|
SU1517489A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА И СКОРОСТИ ВАЛА В КОД | 1997 |
|
RU2128879C1 |

