Область техники
Настоящее изобретение относится к устройствам, способам и системам контроля за ротором турбины.
Предшествующий уровень техники
Сертификация турбинного двигателя требует, чтобы для роторных узлов был продемонстрирован высокий уровень целостности, где термин «роторный узел» означает все компоненты, которые призваны вращаться и которые обладают кинетической энергией в то время, когда двигатель находится в эксплуатации, такие как роторы турбин и компрессоров, а также соединительные и трансмиссионные валы. Более точно, в области авиации, в частности, в нормах сертификации обычно требуется, чтобы не было механического выхода из строя, который мог бы привести к эффекту, который является опасным. Вот почему важно иметь возможность контролировать набор параметров, относящихся к роторным узлам и, более конкретно, к роторам турбин, включающий в себя, в частности, скорость вращения. Таким образом, турбина может быть незамедлительно остановлена в случае выхода из строя, который, в противном случае, может заставить ее перейти в режим превышения скорости.
Однако окружающая турбину среда и, в частности, ее температура, которая может составлять около 1500°С, очень затрудняет непосредственный контроль параметров ротора турбины и, в частности, контроль скорости ротора. Обычно скорость ротора турбины измеряют опосредованно в холодной зоне, удаленной от турбины, посредством датчика изменяющегося магнитного сопротивления и фонического колеса, приводимого в действие с помощью вала, прикрепленного к ротору турбины. Недостаток этого традиционного решения заключается в том, что в случае поломки вала, обеспечивающего механическое соединение между ротором турбины и фоническим колесом, это устройство для косвенного контроля ротора может показывать скорость, которая меньше, чем реальная скорость ротора, при этом, если двигатель управляется на основе этого ошибочного измерения скорости, то это, следовательно, может привести к началу превышения скорости у двигателя и к последствиям, которые являются потенциально очень опасными.
Нормы сертификации для двигателей турбин направлены на повышение безопасности, при этом любой риск, даже самый малый, поломки вала, приводящего в действие фоническое колесо, не является больше приемлемым.
Поэтому были рассмотрены альтернативные решения, позволяющие, в частности, непосредственно измерять скорость ротора турбины. С этой целью были предложены и емкостные датчики, и оптические датчики.
Емкостные датчики являются датчиками расстояния, которые позволяют обнаружить детали и, в частности, металлические детали, такие как лопатки турбины, когда они входят в область обнаружения датчика, за счет изменения емкостного сопротивления соединения между двумя электродами датчика, которое образует конденсатор. Тем не менее, хотя существуют емкостные датчики, которые выполнены с возможностью работы при температурах, которые существуют в сердечнике такой турбины, энергия передаваемых такими датчиками сигналов является очень малой, порядка нескольких пикофарад, что затрудняет заслуживающие доверие измерения.
Оптические датчики являются датчиками, которые позволяют обнаруживать детали, такие как лопатки турбины, за счет прерывания или отражения луча света и, в частности, лазерного луча. Тем не менее, оптические датчики являются обычно слишком хрупкими для использования в сложной высокотемпературной среде, окружающей турбину.
Альтернативно, в патенте США № 5479826 были сделаны предложения использовать датчик, содержащий микроволновый трансивер, соединенный с помощью волновода с точкой считывания поблизости от лопаток ротора. В контексте настоящего описания термин «волновод» используется для обозначения конструкции, служащей, чтобы направлять распространение волн по меньшей мере в одном заданном направлении. Таким образом, такой микроволновый волновод служит, чтобы направлять распространение микроволн от трансивера к точке считывания и, в свою очередь, чтобы направлять их назад к трансиверу после отражения на лопатках, проходящих мимо, вблизи от точки считывания. Таким образом, этот датчик может обнаружить прохождение лопаток посредством того, как они изменяют полное сопротивление волновода. Тем не менее, это устройство остается относительно сложным и влечет за собой недостатки с точки зрения стоимости и надежности.
Еще одно устройство для контроля ротора турбины раскрыто в патентной заявке США № 2010/0011868. Это контрольное устройство по предшествующему уровню техники имеет акустический датчик и первый звуковой волновод для связи упомянутого акустического датчика с точкой считывания поблизости от упомянутого ротора турбины. В контексте настоящего описания термин «звуковая волна» используется для обозначения распространения продольной механической волны любого вида через текучую или твердую среду в результате ее эластичности при независимости от диапазона ее частоты. Термин «звуковой волновод» поэтому используется для обозначения конструкции, которая выполнена с возможностью направлять распространение таких продольных механических волн. Обычно такой звуковой волновод выполнен в виде полого канала, который вытянут в требуемом направлении для распространения звуковой волны. При эксплуатации акустический датчик обнаруживает прохождение лопаток ротора посредством модуляции амплитуды акустического сигнала, посланного акустическим излучателем через второй звуковой волновод, параллельный первому волноводу, по направлению к точке излучения, которая находится также вблизи от ротора турбины. Поскольку прохождение лопатки между точкой излучения и точкой считывания блокирует передачу акустического сигнала между точкой излучения и точкой считывания, то, когда ротор вращается, акустический датчик принимает сигнал, который является амплитудой, которая смодулирована за счет прохождения лопаток.
Хотя это устройство по предшествующему уровню техники позволяет осуществлять непосредственное измерение скорости ротора турбины с помощью датчика, который является сравнительно простым и расположенным в холодной зоне, оно, тем не менее, требует два звуковых волновода и излучатель звуковых волн. В дополнение, обнаружение прохождения лопаток посредством модуляции амплитуды звуковых волн применимо только к роторам, имеющим относительно ограниченное число лопаток. Частота модуляции равна скорости вращения ротора, умноженной на число лопаток. Если скорость вращения составляет порядка от 20000 оборотов в минуту (об/мин) до 40 000 (об/мин), то ротор с десятью лопатками будет модулировать амплитуду акустического сигнала при частоте порядка от 3,3 килогерц (кГц) до 6,7 (кГц). Поскольку волна, несущая амплитуду модулированного сигнала, должна иметь частоту, которая значительно выше, чем частота модуляции, этот тип устройства требует высоких частот (например, выше, чем 80(кГц)), если оно применяется к турбинам, в которых роторы имеют большое число лопаток, таким как осевые турбины, которые обычно используются в области авиации и которые могут иметь обычно от 50 до 199 лопаток.
Краткое изложение сущности изобретения
Задачей настоящей заявки является предложить устройство для контроля ротора турбины, которое также имеет акустический датчик и звуковой волновод для связи упомянутого акустического датчика с точкой считывания вблизи от упомянутого ротора турбины, но которое позволяет контролировать роторы турбины, которые имеют большое число лопаток, одновременно являясь особенно простым и, таким образом, надежным, и которое является, к тому же, относительно недорогим.
Эта задача решается тем, что акустический датчик контрольного устройства по меньшей мере в одном варианте осуществления настоящего изобретения выполнен с возможностью обнаружения в качестве звуковых волн, колебаний давления, соответствующих разницам давления между сторонами низкого и высокого давления лопаток ротора, по мере того как они перемещаются мимо, вблизи от упомянутой точки считывания.
С акустическим датчиком, имеющим такую чувствительность, больше не существует потребности излучать сигнал-носитель для того, чтобы обнаружить прохождение лопаток, поскольку ротор сам по себе работает как акустический излучатель, доставляющий сигнал на частоте, которая прямопропорциональна числу лопаток и скорости вращения ротора. Таким образом, ротор, имеющий 60 лопаток и вращающийся при скорости в диапазоне от 20000 об/мин до 40000 об/мин, будет излучать акустический сигнал, который остается внутри диапазона частоты от 20(кГц) до 40(кГц).
Предпочтительно, устройство может включать в себя блок вычисления, соединенный с упомянутым акустическим датчиком. Блок вычислений может таким образом анализировать излучаемый ротором акустический сигнал как переданный звуковым волноводом и принятый акустическим датчиком, для того чтобы рассчитать набор параметров, касающихся работы ротора. В частности, блок вычислений может быть выполнен с возможностью расчета скорости вращения ротора на основе частоты упомянутых звуковых волн, причем упомянутая скорость вращения прямопропорциональна упомянутой частоте и обратнопропорциональна числу лопаток упомянутого ротора. Тем не менее вычислительный блок в альтернативном варианте или в дополнение может быть выполнен с возможностью вычисления других параметров работы ротора.
Таким образом, вычислительный блок может быть к тому же выполнен с возможностью оценки расстояния ротора от точки считывания на основе амплитуды упомянутых звуковых волн, таким образом, позволяя определить, например, зазор ротора по отношению к окружающему его кольцу, и в котором находится точка считывания, а если имеется множество контрольных устройств с точками считывания в разных угловых положениях вокруг кольца, то также можно обнаружить возможное ухудшение характеристик кольца, такое как истирание или потеря круглой формы. Вычислительный блок может быть к тому же выполнен с возможностью индикации ухудшения характеристик лопаток, если звуковая волна, которую принял акустический датчик, представляет собой амплитуду, которая значительно отличается от среднего значения множества предшествующих звуковых волн, от заданного контрольного значения, от заданного диапазона нормальных значений и/или от звуковых волн, которые приняты устройствами одного и того же типа, но в разных положениях, указывая, таким образом, на одну или более лопаток, которые повреждены или другим образом ухудшились их характеристики.
Предпочтительно, упомянутый звуковой волновод имеет безэховое окончание на конце, противоположном к упомянутой точке считывания, причем акустический датчик находится между точкой считывания и безэховым окончанием. Это безэховое окончание может быть, например, в виде винтовой линии, спирали, спиральной лестницы или гибкого вывода, и его сечение может также меняться. Таким образом, есть возможность избежать стоячих волн, которые создаются в волноводе, для звуковых волн при некоторых частотах. Тем не менее, в частности, если диапазон частоты, соответствующий рабочему диапазону ротора, не включает в себя какой-либо резонансной частоты волновода, то также можно просто предусмотреть размещение акустического датчика в качестве окончания для волновода.
Настоящее описание также относится к ступени турбины, содержащей ротор с лопатками, которые при эксплуатации демонстрируют разницы давления между сторонами низкого и высокого давления лопатки, а для того, чтобы контролировать упомянутый ротор, по меньшей мере одно контролирующее устройство содержит акустический датчик и звуковой волновод для соединения упомянутого акустического датчика с точкой считывания вблизи от упомянутого ротора турбины, причем упомянутый акустический датчик выполнен с возможностью обнаружения, в качестве звуковых волн, колебаний давления, соответствующих разнице давления между сторонами низкого и высокого давления лопаток ротора, по мере того как лопатки перемещаются мимо, вблизи от упомянутой точки считывания.
Предпочтительно, точка считывания представляет собой отверстие во внутренней стенке вокруг ротора. В частности, оно может быть размещено обращенным к центральному сечению профиля лопатки, месторасположение, в котором колебания давления, обусловленные разницами давления между сторонами низкого и высокого давления лопаток, проходящих перед точкой считывания, являются наиболее ярко выраженными. Для того чтобы обеспечить возможность хорошего определения этих колебаний, упомянутое отверстие может иметь диаметр, который меньше, чем толщина профиля лопатки.
Настоящая заявка также относится к турбинному двигателю, включающему в себя такую ступень турбины, и к способу контроля ротора турбины, в котором колебания давления, обусловленные разницами давления между сторонами низкого и высокого давления лопаток ротора, проходящих мимо, вблизи точки считывания, передают с помощью звукового волновода на акустический датчик для того, чтобы быть принятыми как звуковые волны.
Краткое описание чертежей
Изобретение может быть хорошо понято и его преимущества лучше проявляются при чтении нижеследующего подробного описания варианта осуществления настоящего изобретения, приведенного с помощью примера, не носящего ограничительного характера. Описание относится к сопровождающим чертежам, на которых:
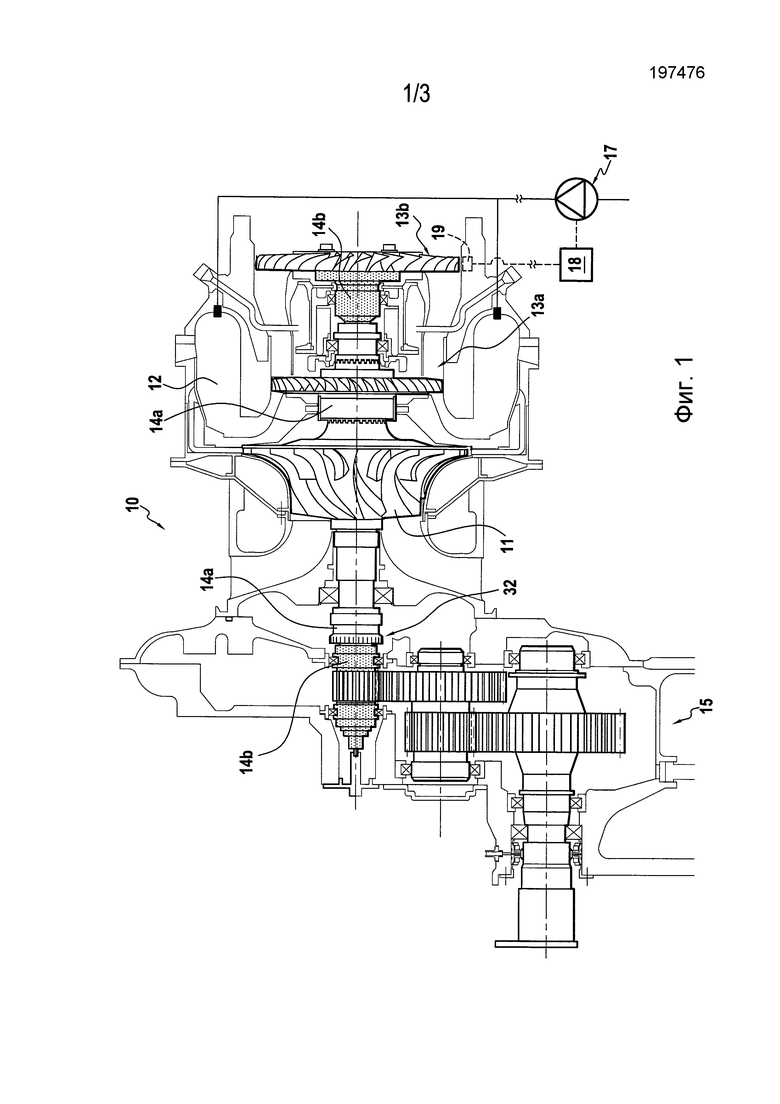
Фиг. 1 представляет собой схематичный вид турбовального двигателя, включающего в себя контрольное устройство в одном варианте осуществления настоящего изобретения;
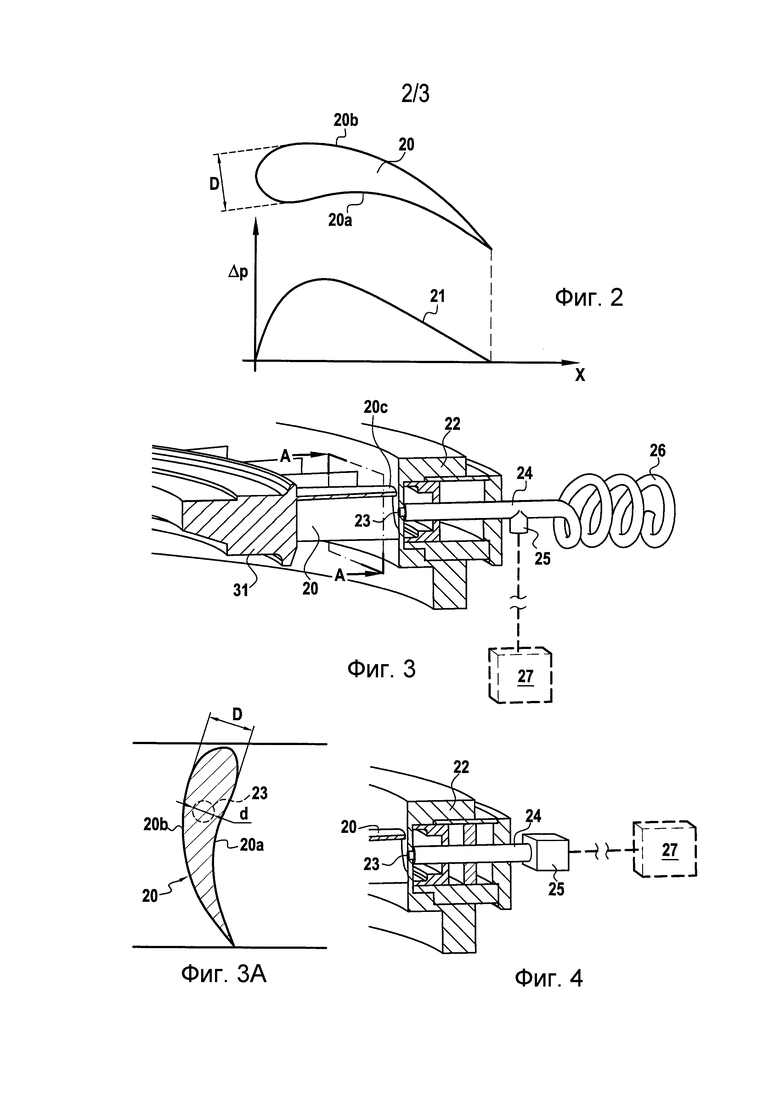
Фиг. 2 представляет собой чертеж профиля лопатки турбины, на котором также показана разница давления между сторонами низкого и высокого давления лопатки;
Фиг. 3 представляет собой чертеж ступени турбины в продольном разрезе с контрольным устройством в одном варианте осуществления настоящего изобретения;
Фиг. 3А представляет собой разрез по линии А-А лопатки из ступени турбины по фиг. 3, на котором показана точка считывания контрольного устройства;
Фиг. 4 показывает деталь альтернативного варианта осуществления настоящего изобретения;
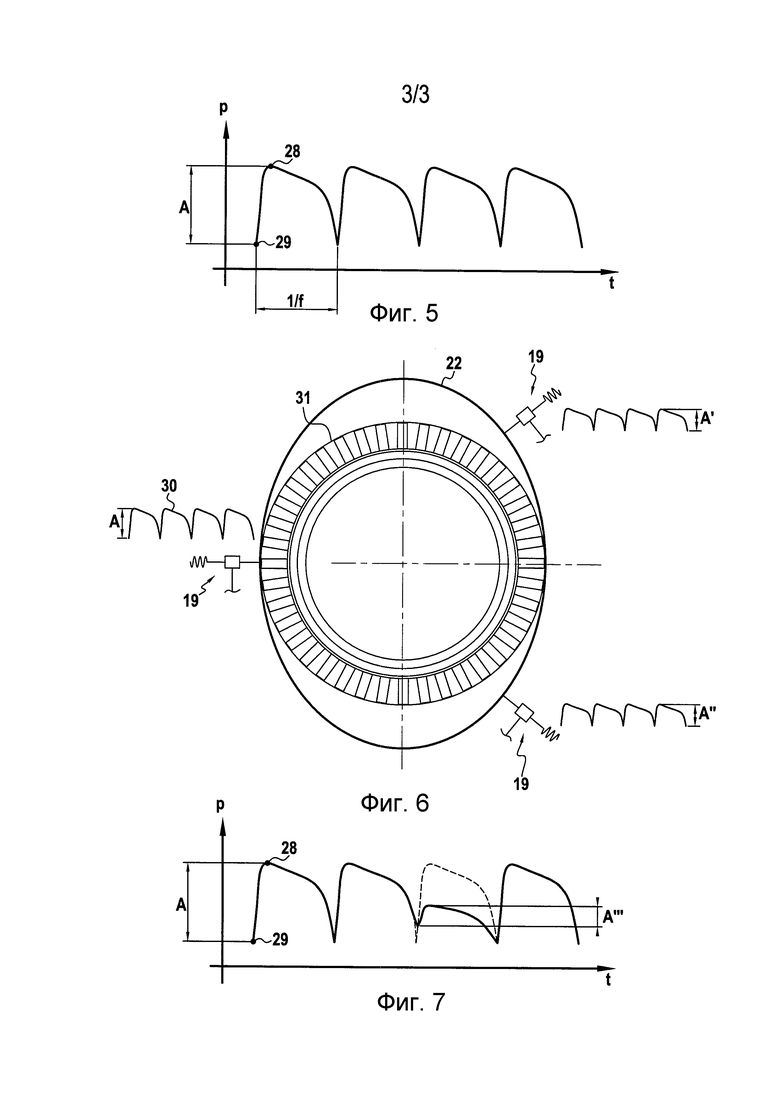
Фиг. 5 представляет собой диаграмму, на которой показаны колебания давления, вызванные лопатками, проходящими мимо вблизи контрольного устройства по фиг. 3;
Фиг. 6 показывает, как множество контрольных устройств, таких как показанное на фиг. 3 устройство, могут обнаруживать нарушение формы круга кольца, когда они распределены вокруг турбинного кольца, и
Фиг. 7 показывает, как звуковые волны, улавливаемые показанным на фиг. 3 контрольным устройством, могут указывать на ухудшение характеристик лопатки ротора.
Описание предпочтительных вариантов воплощения
Турбинный двигатель 10 и, более конкретно, турбовальный двигатель воздушного судна с несущим винтом схематично показан на фиг. 1. Двигатель 10 содержит компрессор 11, камеру сгорания 12 и две взаимно разъединенные турбины 13а и 13b, причем компрессор 11 и турбина 13а соединены вместе с помощью общего вала 14а. При эксплуатации воздух всасывается и сжимается посредством компрессора 11, при этом топливо впрыскивается в камеру сгорания 12, где оно сжигается. Расширение рабочего газа через турбины 13а и 13b приводит в действие не только компрессор 11 через ротор турбины 13а и вал 14а, но также через ротор турбины 13b, вал 14b и трансмиссию 15, соединенную с валом 14b, к несущему винту, а также к вспомогательным элементам воздушного судна (не показано).
Для того чтобы регулировать работу турбины 10, система 17 для снабжения камеры сгорания 12 топливом соединена с блоком 18 управления, который, в свою очередь, соединен с устройством 19 для контроля ротора турбины 13b для того, чтобы принимать сигналы, указывающие на скорость ротора. Таким образом, для того, чтобы сделать скорость ротора безопасной, блок управления 18 отсекает поток топлива в том случае, если ротор превышает максимально разрешенную скорость или максимально разрешенное ускорение. Поэтому, в целях безопасности, очень важно обеспечить, чтобы сигналы скорости, принимаемые блоком управления, были заслуживающими доверия. В частности, недооценка скорости контрольным устройством 19 может привести к превышению скорости двигателя 10. Именно поэтому измерение скорости с помощью контрольного устройства 19 коррелируется с измерением скорости, осуществленным традиционным путем с помощью фонического колеса 32.
Турбина 13b является турбиной осевого потока с ротором, имеющим множество лопаток 20, ориентированных в радиальном направлении вокруг вала 14b. Каждая лопатка 20 представляет собой профиль обтекаемого крыла, такой как показано на фиг. 2, со стороной 20а высокого давления, стороной 20b низкого давления лопатки и толщиной D. Поток рабочего газа, протекающий мимо профиля, создает разницу давления Δр, как представлено кривой 21 на той же самой фигуре, где разница давления нанесена на график как функция расстояния х в направлении потока рабочего газа. Таким образом, можно видеть, что эта разница давления Δр особенно выделена на центральном сегменте С профиля лопатки 20.
Фиг. 3 представляет собой описательный продольный разрез ступени турбины 13b. Эта ступень турбины имеет множество лопаток 20, размещенных радиально вокруг вала 14b в роторе 31. Кольцо 21 турбины окружает дистальные концы 20с лопаток турбины 13b, не касаясь их. В показанном на фиг. 3 варианте осуществления настоящего изобретения отверстие 23 в кольце 22 турбины образует точку считывания, которая соединена через звуковой волновод 24, который проходит через кольцо 22 турбины, с акустическим датчиком 25, находящимся в холодной зоне, поскольку он не способен выдерживать температуры, которые существуют в окружающей турбину 13b среде. Этот звуковой волновод 24 выполнен в виде вытянутого полого канала между первым концом на чувствительной точке и противоположным концом. На его конце, противоположном к точке считывания, звуковой волновод 24 имеет спиральное безэховое окончание 26. Могут быть рассмотрены другие альтернативные формы безэхового окончания, такие как окончание в виде спирали, спиральной лестницы или гибкого проводника. Они также могут иметь изменяющееся сечение. В подробно показанном на фиг. 4 варианте акустический датчик 25 может быть размещен, чтобы заканчивать волновод 24 вместо безэхового окончания, при условии, что отсутствует риск резонанса в диапазоне частоты, которую контролируют и которая может приводить к резонансу, создающему стоячую волну в волноводе 24. Вместе отверстие 23, волновод 24 и датчик 25 образуют контрольное устройство 19. Как можно видеть на фиг. 3А, отверстие 23 расположено обращенным к центральной секции С профиля лопатки 20, где имеется наибольшая разница давления Δр между стороной 20b низкого давления и стороной 20а высокого давления лопатки. Отверстие 23 предпочтительно имеет диаметр d, который меньше, чем толщина D профиля лопатки 20 в этой секции, таким образом, чтобы избежать наложения и стороны 20b низкого давления, и стороны 20а высокого давления лопатки в одно и то же время.
Акустический датчик 25 соединен с вычислительным блоком 27, который может быть встроен в блок 18 управления или, в альтернативном варианте, в контрольное устройство 19. Когда турбина 13 находится в эксплуатации, лопатки, последовательно проходящие мимо точки считывания, вызывают колебания давления в точке считывания, эти колебания передаются в качестве звуковых волн на частоте, с которой лопатки проходят мимо, эти волны перемещаются вдоль звукового волновода 24 к акустическому датчику 25. Датчик 25 выполнен с возможностью восприятия этих звуковых волн и их передачи в виде электрического сигнала на вычислительный блок 27. Колебания давления в точке считывания и, следовательно, также звуковые волны, принятые акустическим датчиком 25, и результирующий электрический сигнал имеют вид показанного в качестве примера типа на фиг. 5. Эта кривая содержит последовательность максимумов и минимумов, соответствующих сторонам 20b низкого давления и сторонам 20а высокого давления лопаток 20 при частоте f, соответствующей частоте, с которой лопатки проходят мимо таким образом, что скорость вращения ротора 31 может быть оценена с помощью вычислительного блока, путем деления этой частоты f сигнала, переданного акустическим датчиком 25, на число лопаток в роторе 31.
Так же как скорость ротора 31, другие рабочие параметры турбины 13 могут быть выведены из этого сигнала. Например, поскольку амплитуда колебаний давления в точке считывания уменьшается с увеличением расстояния между венцами лопаток 20 и точкой всасывания, это расстояние или по меньшей мере то, как оно изменяется с течением времени, может быть также выведено с помощью вычислительного блока 27 на основе амплитуды А волн в сигнале, переданном акустическим датчиком 25. В частности, таким образом можно измерить зазор между лопатками 20 и кольцом 22 турбины, и посредством этого обнаружить любые ухудшения характеристик кольца 22 турбины или лопаток 20. В частности, при наличии множества контрольных устройств 19, расположенных вокруг ротора 31, можно обнаружить потерю круглой формы кольца 22 турбины показанным на фиг. 6 образом. Каждое из контрольных устройств 19 создает сигнал 30 с разной амплитудой А, A',A”. Поскольку большая амплитуда для сигнала 30 указывает на меньший зазор между ротором и кольцом 22, а меньшая амплитуда указывает на больший зазор, эти разницы в амплитуде между сигналом указывают, что зазор между ротором 31 и кольцом 22 изменяется вдоль окружности кольца 22 и, следовательно, что кольцо демонстрирует изменение формы круга, как показано (в сильно увеличенном виде). Таким образом, вычислительный блок 27 может быть выполнен с возможностью указания на такое изменение круглой формы на основе сигналов, переданных контрольными устройствами 19.
Контрольные устройства 19 также могут служить для обнаружения ухудшения характеристик как отдельной лопатки 20, так и лопаток в целом. В контексте настоящего описания термин «ухудшение» используется для обозначения любого изменения в лопатке 20, которое может изменить ее характеристики, такие как удлинение, или, конечно, износ, а также включая полную или частичную поломку лопатки 20. Например, в конкретной ситуации превышения скорости, нагрев лопаток 20 и центробежная сила могут приводить к удлинению лопаток 20, так что их дистальные концы 20с становятся ближе к кольцу 22 турбины и к точке считывания контрольного устройства 19. Амплитуда колебания давления в точке считывания, когда такая удлиненная лопатка 20 проходит мимо, находится выше номинального контрольного значения. И наоборот, в случае полной или частичной поломки отдельной лопатки 20 разница давления между стороной 20b низкого давления и стороной 20а высокого давления лопатки будет меньше, что будет проявлено в сигнале 30 посредством волны с амплитудой A”', которая значительно меньше, чем амплитуда А предшествующих сигналов, как показано на фиг. 7.
Таким образом, вычислительный блок 27 может быть выполнен с возможностью указания на такую потерю круглой формы и/или ухудшение характеристик на основе сигнала, переданного одним или более контрольным устройством 19.
Технология контроля скорости турбины 13а может быть перенесена путем, идентичным описанному выше контролю турбины 13b, в частности, на контроль удлинения лопаток турбины 13а, - эти подвержены более высоким температурам.
Более того, техника измерения, основанная на разнице давления между стороной низкого давления и стороной высокого давления профиля лопаток, также может быть использована для выполнения измерений в компрессоре несмотря на то, является ли компрессор осевым или радиальным, или центробежным.
Хотя изобретение описано выше со ссылкой на конкретные варианты осуществления настоящего изобретения, понятно, что различные модификации и изменения могут быть выполнены в этих вариантах осуществления настоящего изобретения, не выходя за общий объем изобретения, как он определен в формуле изобретения.
Следовательно, описание и чертежи следует рассматривать как имеющие иллюстративный, а не ограничительный характер.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ ЛОПАТОК ТУРБИН И КОМПРЕССОРОВ | 1992 |
|
RU2112934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2002 |
|
RU2207524C1 |
| СТУПЕНЬ ОСЕВОГО КОМПРЕССОРА | 2004 |
|
RU2269680C1 |
| СПОСОБ УВЕЛИЧЕНИЯ МЕХАНИЧЕСКОЙ СКОРОСТИ ПРОХОДКИ НА ДОЛОТО ПРИ ТУРБИННОМ БУРЕНИИ | 2004 |
|
RU2270312C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУД КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2003 |
|
RU2244272C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗАЗОРА ДО ВЕРШИН ЛОПАТОК ТУРБИНЫ | 2002 |
|
RU2237866C2 |
| ЛОПАТОЧНЫЙ ВЕНЕЦ ОСЕВОГО КОМПРЕССОРА | 2004 |
|
RU2269679C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН | 2002 |
|
RU2229104C1 |
| СТРУКТУРНАЯ ИЛИ НЕСТРУКТУРНАЯ СОЕДИНИТЕЛЬНАЯ СТОЙКА КАРТЕРА КОМПРЕССОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ, ПРОМЕЖУТОЧНЫЙ КАРТЕР ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ И ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2472042C2 |
| Система и способ контроля состояния лопаток статора | 2013 |
|
RU2612999C2 |
Изобретение относится к области контрольных устройств для контроля роторов турбин. Заявлены контрольное устройство для контроля ротора турбины, способ контроля ротора турбины, ступень турбины, турбинный двигатель. Заявленное контрольное устройство содержит акустический датчик и звуковой волновод для связи упомянутого акустического датчика с точкой считывания, близкой к упомянутому ротору турбины; акустический датчик выполнен с возможностью обнаружения, в качестве звуковых волн, колебаний давления, обусловленных разницами давления между сторонами низкого и высокого давления лопаток ротора, по мере того как они перемещаются мимо, вблизи от упомянутой точки считывания. Техническим результатом является обеспечение контроля роторов турбины, которые имеют большое число лопаток. 4 н. и 6 з.п. ф-лы, 8 ил.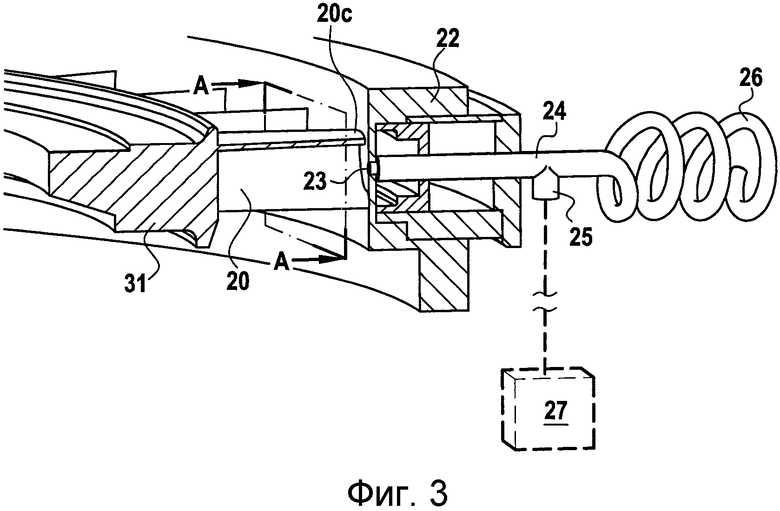
1. Контрольное устройство (19) для контроля ротора (13b) турбины, причем упомянутое контрольное устройство (19) содержит:
- акустический датчик (25) и
- звуковой волновод (24) для связи упомянутого акустического датчика (25) с точкой считывания, близкой к упомянутому ротору (13b) турбины,
отличающееся тем, что акустический датчик (25) выполнен с возможностью обнаружения, в качестве звуковых волн, колебаний давления, обусловленных разницами давления между сторонами (20b, 20a) низкого и высокого давления лопаток (20) ротора (13), по мере того как они перемещаются мимо, вблизи от упомянутой точки считывания.
2. Контрольное устройство (19) по п.1, дополнительно включающее в себя вычислительный блок (27), соединенный с упомянутым акустическим датчиком (25).
3. Контрольное устройство (19) по п.2, в котором упомянутый вычислительный блок (27) выполнен с возможностью вычисления скорости вращения ротора (31) на основе частоты упомянутых звуковых волн, причем упомянутая скорость вращения прямо пропорциональна упомянутой частоте и обратно пропорциональна числу лопаток (20) упомянутого ротора (31).
4. Контрольное устройство (19) по п.1, в котором упомянутый звуковой волновод (24) имеет безэховое окончание (26) на конце, противоположном упомянутой точке считывания, причем акустический датчик (25) расположен между точкой считывания и безэховым окончанием (26).
5. Ступень турбины (13b), содержащая ротор (31) с лопатками (20), который при эксплуатации дает разницу давления между сторонами (20b, 20a) низкого и высокого давления, и с целью контролировать упомянутый ротор (31), по меньшей мере, одно контрольное устройство (19) по любому из пп.1-4.
6. Ступень турбины (13b) по п.5, отличающаяся тем, что она является ступенью (13b) осевой турбины, при этом точка считывания является отверстием (23) во внутренней стенке вокруг ротора (31).
7. Турбинный двигатель (10), включающий в себя, по меньшей мере, одну ступень (13b) турбины по п.5.
8. Турбинный двигатель (10) по п.7, в котором упомянутая ступень (13b) турбины находится в горячей секции турбинного двигателя (10), при этом акустический датчик (25) находится в более холодной зоне.
9. Способ контроля ротора (31) турбины (13b), в котором колебания давления, обусловленные разницами давления между сторонами (20b, 20a) низкого и высокого давления лопаток (20) ротора (31), проходящих мимо, вблизи от точки считывания, передают с помощью звукового волновода (24) на акустический датчик (25) для того, чтобы они были принятыми в качестве звуковых волн.
10. Способ контроля по п.9, в котором скорость вращения ротора (31) вычисляют с помощью вычислительного блока (27), соединенного с упомянутым акустическим датчиком (25), путем деления частоты звуковых волн на число лопаток (20) ротора (31).
| US 5471880 A, 05.12.1995 | |||
| US 5479826 A, 02.01.1996 | |||
| US 2002059831 A1, 23.05.2002 | |||
| Устройство для измерения дискретных составляющих акустических колебаний ротора компрессора | 1979 |
|
SU781656A1 |

