Предлагаемое изобретение относится к области радиотехники и может быть использовано в системах радиолокации.
Известен способ отождествления пеленгов на источники излучения [1], использующий логическое правило «m из m», где m≥3. Согласно данному способу местоположение истинного источника излучения определяется точкой пересечения m пеленгов (с учетом допустимых ошибок пеленгации), полученных в m разнесенных в пространстве пунктах приема излучений.
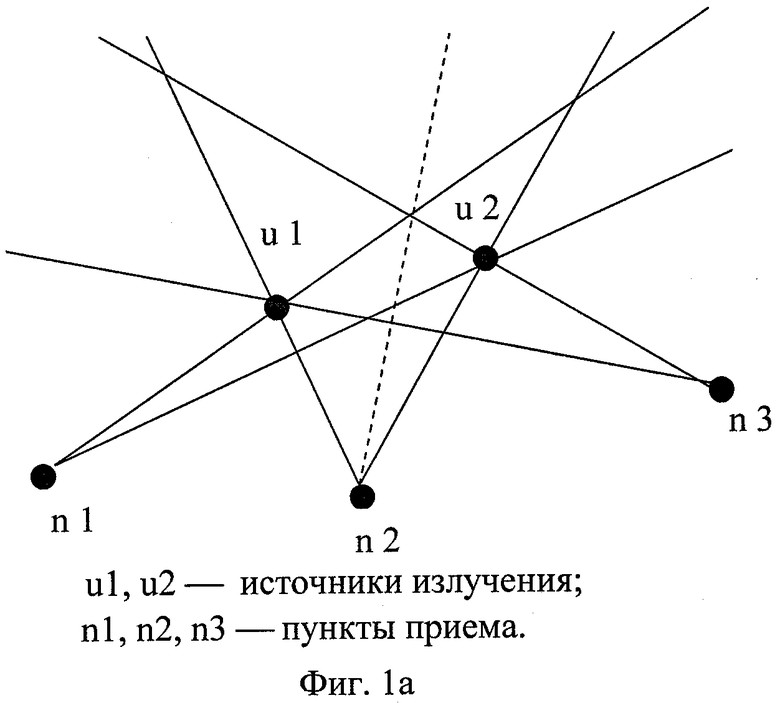
На фиг.1а приведен пример отождествления пеленгов двух источников излучения (u1, u2), полученных в трех пунктах приема (n1, n2, n3). Согласно логическому правилу «три из трех» две точки пересечения трех пеленгов определяют местоположение истинных источников излучения, а точкам пересечения двух пеленгов соответствуют фиктивные источники излучения.
Недостатком известного способа является необходимость получения не менее трех пеленгов для каждого источника излучения. Выполнение данного требования связано с необходимостью создания многопозиционных систем пассивной локации и обеспечением возможности радиолокационного наблюдения в каждом из пунктов приема излучений.
Известен также способ отождествления пеленгов на источники излучения [2], в основу которого положено сопоставление точек пересечения азимутальных и угломестных пеленгов. Согласно данному способу источник излучения считается истинным, если высоты точки пересечения азимутальных пеленгов, рассчитанные с учетом угломестных пеленгов различных пунктов приема, совпадают в пределах допустимых отклонений.
Для проверки выполнения изложенного условия рассчитываются прямоугольные координаты i-ой точки пересечения азимутальных пеленгов в системе координат первого пункта:


где Х2, Y2 - прямоугольные координаты точки стояния второго пункта приема излучений в системе координат первого пункта;
βi1, βi2 - азимутальные пеленги на i-ый источник излучения (истинный или фиктивный), полученные в первом и втором пункте приема излучений соответственно.
Далее рассчитываются горизонтальные дальности rг1i, Гг2i i-го источника излучения до первого и второго пунктов приема:


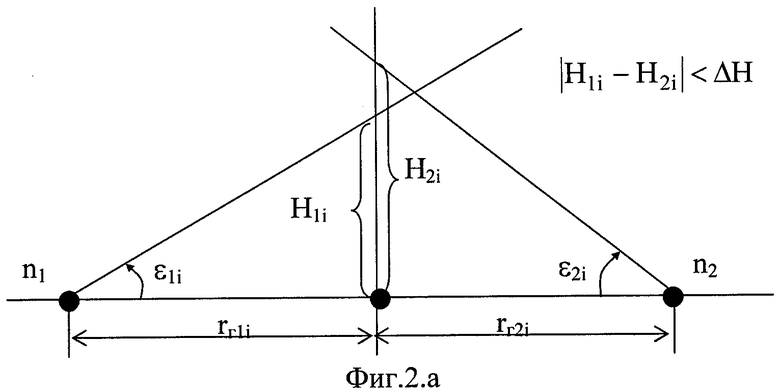
Используя угломестные пеленги ε1i, ε2i i-го источника излучения, полученные в первом и втором пунктах приема, определяют значения высот:


При заданном допустимом отклонении ΔН проводится проверка выполнения условия

соответствующего принятию решения о принадлежности источника излучения к числу истинных.
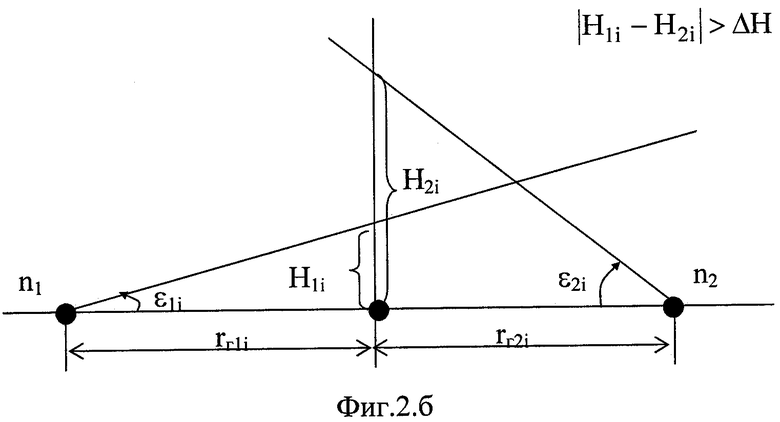
На фиг.2 приведены примеры результатов отождествления пеленгов истинного (фиг.2а) и фиктивного (фиг.2б) источников излучения.
Известный способ допускает отождествление пеленгов на источники излучения при наличии двух разнесенных в пространстве пунктов приема. Однако данный способ становится малоэффективным, когда расстояния от истинных источников излучения до плоскости, проходящей через пункты приема и один из источников, отличаются незначительно. В частности, если истинные источники излучения и пункты приема находятся в одной плоскости, то условие (7) выполняется и для фиктивных источников излучения.
Наиболее близким к предлагаемому изобретению является корреляционный способ отождествления пеленгов [1], выбранный в качестве прототипа. Согласно данному способу источник излучения считается истинным, если коэффициент корреляции сигналов, принимаемых с анализируемых направлений с учетом выравнивания их взаимного запаздывания, существенно отличен от нуля.
Известный способ допускает решение задачи отождествления пеленгов на источники излучения при наличии двух пунктов приема, а его эффективность практически не зависит от пространственных положений источников излучения. Однако реализация известного способа требует согласованного обзора пространства разнесенными пунктами приема, что затрудняет его осуществление.
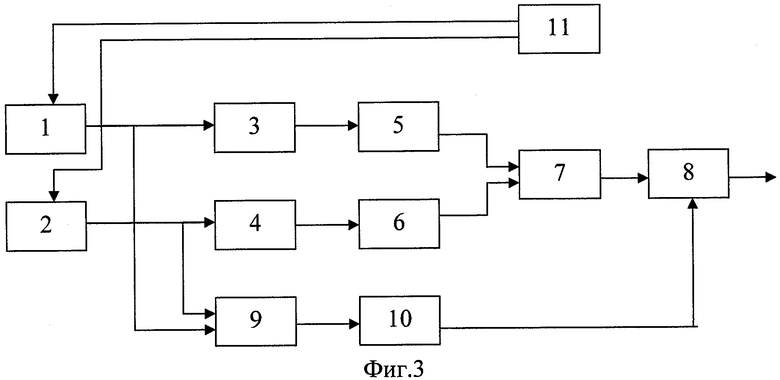
Устройство корреляционного отождествления пеленгов (фиг.3) содержит разнесенные в пространстве антенны 1, 2; пеленгационные каналы 3, 4; измерители пеленгов 5, 6; блок расчета координат 7; электронный ключ 8; спектральный коррелятор 9; пороговое устройство 10; блок синхронизации 11. При этом выходы антенн 1, 2 через последовательно соединенные пеленгационные каналы 3, 4 и измерители пеленгов 5, 6 подключены к первому и второму входам блока расчета координат 7 соответственно, выход которого связан со входом электронного ключа 8, а выход последнего является выходом устройства. Выходы антенн 1, 2, кроме того, соединены с первым и вторым входами спектрального коррелятора 9, выход которого через пороговое устройство 10 подключен к управляющему входу электронного ключа 8. Первый и второй выходы блока синхронизации 11 соединены с управляющими входами антенн 1, 2 соответственно.
Работа устройства состоит в следующем. Блок синхронизации 11, подключенный к управляющим входам антенн 1, 2, обеспечивает режим согласованного обзора пространства, при котором на интервале цикла обзора осуществляется радиолокационное наблюдение всех угловых направлений зоны обнаружения двухпозиционной системы пассивной радиолокации.
В процессе обзора пространства с выходов антенн 1, 2 снимаются высокочастотные колебания, представляющие собой аддитивную смесь сигналов и помех. К числу сигналов относятся высокочастотные колебания источников излучения, принимаемые главным лучом диаграммы направленности антенны, а к числу помех - колебания источников излучения, воздействующие по боковым лепесткам диаграммы направленности антенны, и флюктуационный шум.
Пусть с анализируемых угловых направлений антенны 1 и 2 принимают сигналы одного и того же источника излучения. Данные сигналы с выходов антенн 1, 2 подаются в пеленгационные каналы 3, 4 для фильтрации и порогового обнаружения. Результаты обнаружения, например, в виде одиночных импульсов используются в блоках 5, 6 для оценивания азимутальных и угломестных пеленгов. Результаты измерения, например, в виде последовательного двоичного кода поступают в блок расчета координат 7, где оцениваются прямоугольные координаты источника излучения.
Одновременно высокочастотные сигналы с выходов антенн 1, 2 подаются на входы спектрального коррелятора 9, на выходе которого периодически формируется напряжение, пропорциональное огибающей взаимной корреляционной функции обрабатываемых сигналов. Для анализируемого случая (сигналы обусловлены одним и тем же источником излучения) напряжение на выходе спектрального коррелятора 9 в некоторый момент времени будет существенно отличаться от нуля. Поэтому пороговое устройство 10 сформирует управляющий сигнал, обеспечивающий открытие электронного ключа 8, а следовательно, значений пространственных координат источника излучения на выход устройства.
Если с анализируемых направлений принимаются сигналы различных источников излучения, то выходное напряжение спектрального коррелятора 9 будет определяться некоррелированными шумами. Значения последних (при обоснованном выборе порога в пороговом устройстве 10) не приведут к формированию управляющего сигнала для электронного ключа 8. Поэтому рассчитанные прямоугольные координаты фиктивного источника излучения не будут выданы на выход устройства.
Недостаток устройства обусловлен недостатком известного способа и заключается в сложности реализации согласованного обзора пространства. Действительно, прямоугольные координаты источника излучения оцениваются только в том случае, если его сигналы, принятые в разнесенных пунктах приема, обрабатываются на одном и том же интервале времени.
Целью предлагаемого изобретения является исключение операции согласованного обзора пространства при корреляционном отождествлении пеленгов.
Поставленная цель достигается за счет формирования взаимной корреляционной функции аддитивной смеси сигналов всех наблюдаемых источников излучения, принимаемых слабонаправленными антеннами. В таком случае с выходов слабонаправленных антенн снимается аддитивная смесь сигналов всех наблюдаемых источников излучения на фоне флюктуационного шума.
Реализация предлагаемого способа корреляционного отождествления пеленгов поясняется с помощью следующих чертежей.
На фиг.1б приведена взаимная корреляционная функция аддитивной смеси сигналов наблюдаемых источников излучения.
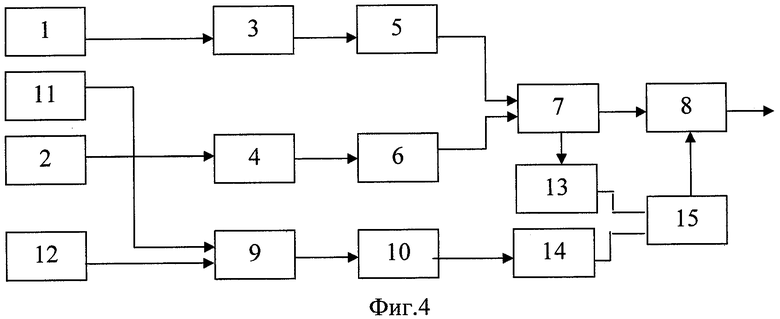
На фиг.4 представлена структурная схема устройства, реализующего предлагаемый способ корреляционного отождествления пеленгов.
Устройство по способу отождествления пеленгов отличается от устройства (фиг.3), выбранного в качестве прототипа, тем, что в него дополнительно введены две слабонаправленные антенны 11, 12, блок расчета разностей хода 13, измеритель взаимных запаздываний 14, схема сравнения 15. Выходы антенн 11, 12 связаны с первым и вторым входами спектрального коррелятора 9, выход которого через последовательно соединенные пороговое устройство 10, измеритель взаимных запаздываний 14 подключен к одному из входов схемы сравнения 15, другой вход которой через блок расчета разностей хода 13 соединен с другим выходом блока расчета координат 7, а выход схемы сравнения 7 подключен к управляющему входу электронного ключа 8.
Устройство содержит:
1, 2 - узконаправленные антенны;
3, 4 - пеленгационные каналы;
5, 6 - измерители пеленгов;
7 - блок расчета координат;
8 - электронный ключ;
9 - спектральный коррелятор;
10 - пороговое устройство;
11, 12 - слабонаправленные антенны;
13 - блок расчета разностей хода;
14 - измеритель взаимных запаздываний;
15 - схема сравнения.
Предлагаемое устройство содержит две узконаправленные антенны 1, 2, выходы которых через последовательно соединенные пеленгационные каналы 3, 4 и измерители пеленгов 5, 6 подключены к первому и второму входам блока расчета координат 7 соответственно, один из входов которого связан со входом электронного ключа 8, а выход последнего является выходом устройства. Выходы слабонаправленных антенн 11, 12 связаны с первым и вторым входами спектрального коррелятора 9 соответственно, выход которого через последовательно соединенные пороговое устройство 10, измеритель взаимных запаздываний 14 подключен к одному из входов схемы сравнения 15, другой вход которой через блок расчета разностей хода 13 соединен с другим выходом блока расчета координат 7, а выход схемы сравнения 7 подключен к управляющему входу электронного ключа 8.
Работа предлагаемого устройства состоит в следующем. С помощью узконаправленных антенн 1, 2 осуществляется несогласованный, например, круговой обзор пространства по азимуту. Принимаемые сигналы источников излучения поступают в пеленгационные каналы 3, 4, где реализуется операция фильтрации сигналов и их пороговое обнаружение. Результаты обнаружения, например, в виде одиночных импульсов поступают в измерители пеленгов 5, 6, где реализуется операция оценивания азимутальных и угломестных пеленгов. Таким образом, на интервале цикла обзора пространства в блок расчета координат 7 поступают значения угловых координат всех наблюдаемых источников излучения: β1i, β2i, ε1i, ε2i, где  .
.
В блоке расчета координат согласно выражениям (1), (2), (5) вычисляются декартовы координаты всех точек пересечений пеленгов в системе координат антенны 1. По аналогичным выражениям рассчитываются декартовы координаты этих же точек, но в системе координат антенны 2. Иначе, в блоке расчета координат определяются значения X1S, Y1S, H1S, X2S, Y2S, H2S, где S=n2. При этом n точек пересечения пеленгов представляют координаты истинных источников излучения, a (n2-n) - координаты фиктивных источников.
Измеренные координаты поступают в блок разностей хода 13, в котором вычисляются взаимные задержки сигналов как для истинных, так и для фиктивных источников излучения:

где t1S, t2S - время распространения электромагнитной волны с s-го источника излучения (как истинного, так и фиктивного) до антенн 1, 2.
Одновременно с рассмотренными процессами с выходов слабонаправленных антенн 11, 12 снимаются высокочастотные колебания, представляющие собой аддитивную смесь сигналов всех наблюдаемых источников излучения на фоне флюктуационных шумов. Данные сигналы поступают на входы спектрального коррелятора 9. На выходе последнего периодически (с периодом повторения, существенно меньшим периода обзора пространства) формируется напряжение, пропорциональное огибающей взаимной корреляционной функции выходных колебаний. Данная функция (8) имеет n максимумов, положения которых по оси взаимных запаздываний определяются пространственными координатами истинных источников излучения согласно выражению (9).
Напряжение с выхода спектрального коррелятора 9 поступает в пороговое устройство 10, которое формирует импульсы, положения которых также определяются взаимными запаздываниями сигналов источников излучения. При этом исключается влияние некоррелированных шумов взаимной корреляционной функции. Сформированные импульсы подаются в измеритель взаимных запаздываний для получения количественных значений параметров τi.
Отождествление пеленгов сводится к отбору координат X1S, Y1S, H1S, для которых параметр ΔtS совпадает с одним из значений параметров τi. С этой целью при анализе координат X1S, Y1S, H1S в схему сравнения 15 поступает значение параметра ΔtS. Схема сравнения формирует управляющий сигнал в случае, если значение ΔtS совпадает с одним из значений параметра τi. В таком случае сформированный управляющий сигнал поступит на управляющий вход электронного ключа 8, что обеспечивает выдачу значений X1S, Y1S, H1S на выход устройства.
Осуществление предлагаемого способа корреляционного отождествления пеленгов, не требующего согласованного обзора пространства, достигается за счет использования в каждом пункте приема дополнительной слабонаправленной антенны. В таком случае с выходов слабонаправленных антенн снимается аддитивная смесь сигналов всех наблюдаемых источников излучения на фоне флюктуационного шума:

где u1, u2 - реализации аддитивной смеси сигналов, принимаемых слабонаправленными антеннами в пунктах 1, 2 соответственно;
n - число наблюдаемых источников излучения;
n1(t), n2(t) - некоррелированные шумовые процессы.
Результат совместной корреляционной обработки сигналов, принятых дополнительными антеннами, с учетом взаимной независимости сигналов различных источников излучения описывается функцией вида:

где Ri(τi) - огибающая корреляционной функции сигналов i-го источника излучения, имеющих взаимное запаздывание τi;
ρΣ(τ) - некоррелированный шум, обусловленный флюктуационными помехами и корреляционными остатками ввиду конечного интервала анализа.
При достаточно высоком корреляционном разрешении, определяемом шириной спектров обрабатываемых сигналов, функция R(τ) имеет n максимумов. При этом каждому i-му источнику излучения соответствует определенное значение параметра τi, т.е.

где t1i, t2i - время распространения электромагнитной волны от i-го источника излучения до первого и второго пунктов приема соответственно;
с - скорость распространения электромагнитной волны в свободном пространстве.
Так как значение параметра τi может быть рассчитано, кроме того, по результатам расчета прямоугольных координат источника излучения, то данный параметр может служить признаком отождествления пеленгов.
На фиг.1б показана огибающая взаимной корреляционной функции R(τ) для случая локации трех источников излучения. Данная функция имеет три корреляционных максимума, каждому из которых по оси τ соответствует значение взаимного запаздывания сигналов одного из источников.
Одновременно (как и в прототипе) осуществляются операции обработки пеленговой информации. В частности, по измеренным пеленгам на источники излучения рассчитываются декартовы координаты всех точек пересечения пеленгов, т.е. координаты как истинных, так и фиктивных источников излучения.
Далее для каждой точки пересечения пеленгов рассчитывается разность дальностей до пунктов приема и соответствующая ей разность хода:

где ks - двухиндексный номер пересечения пеленгов, составленный по условным номерам пеленгов первого и второго пункта приема. Заключительной операцией корреляционного отождествления пеленгов является сопоставление параметров τi и τks, т.е. взаимных запаздываний, полученных по результатам корреляционной обработки и оценки координат точек пересечения пеленгов.
Данная операция сводится к проверке выполнения условия

где Δτ - допустимая суммарная погрешность оценки параметров τks и τi.
При выполнении условия (12) считается, что точка пересечения k-го и s-го пеленгов представляет координаты истинного источника излучения. В противном случае данная точка относится к фиктивному источнику излучения.
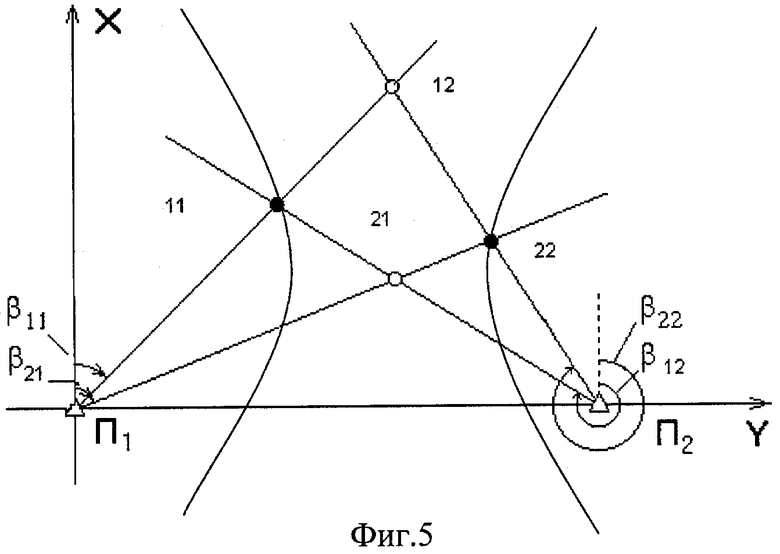
Приведем пример отождествления пеленгов по известному способу в двухпозиционной системе пассивной радиолокации, если в зоне обнаружения находятся два источника излучения. Положим (фиг.5), что координаты пунктов системы радиолокации имеют следующие значения:
X1=0; Y1=0; H1=0; Х2=0; Y2=200 км; Н2=0.
Допустим, что в результате пеленгации получены следующие оценки: β11=45°; β21=70°; β12=300°; β22=330°. Угломестные пеленги для осуществления известного способа отождествления могут не использоваться и поэтому их значения не приводятся.
Согласно известному способу по формулам (1), (2) рассчитываются декартовы координаты всех точек пересечения пеленгов:
Х11=80 км; Y11=80 км; X21=48 км; Y21=128 км;
X12=128 км; Y12=128 км; Х22=64 км; Y22=160 км.
Далее рассчитываются взаимные запаздывания τks для всех точек пересечения:
τ11=-103,61 мкс; τ21=167,24 мкс; τ12=113,86 мкс; τ22=322,84 мкс.
Одновременно с перечисленными операциями в известном устройстве реализуется корреляционная обработка помеховых сигналов.
Допустим, что результатом данной обработки являются значения параметровτ1=-103,72 мкс, τ2=322,76 мкс.
Точность оценок данных неравенств, зависящую от ширины спектров обрабатываемых сигналов, в первую очередь определяет значение параметра Δτ в формуле (12). Так, при ширине спектра Δf=10 МГц значение Δτ примерно равно 0,2·10-6 с.
Далее согласно (11) рассчитываются взаимные запаздывания τks для всех точек пересечения.
Заключительной процедурой отождествления пеленгов является операция отбора координат точек пересечения пеленгов, для которых выполняется условие критерия (12).
Для рассматриваемого примера данное условие выполняется для координат (Х11, Y11) и (Х22, Y22), т.к. |0,11 мкс|<0,2 мкс, |0,08 мкс|<0,2 мкс.
Графическая интерпретация результата отождествления пеленгов, приведенная на фиг.5, заключается в прохождении линий положения (гипербол) через точки, представляющие истинные источники излучения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981.
2. Основы обработки и передачи информации. / В.Д.Громыко, А.И.Крылович, С.П.Толмачев, А.П.Янцев.; Под ред. А.П.Янцева. - М.: Воениздат, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2234712C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2510708C1 |
| Способ адаптивного пространственно-многоканального обнаружения и пеленгования двух частотно-неразделимых источников радиоизлучения | 2020 |
|
RU2732504C1 |
| Устройство для определения направлений на источники радиоизлучения | 2016 |
|
RU2631944C1 |
| Способ определения координат источников радиоизлучений и система для его реализации | 2019 |
|
RU2717828C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
Предлагаемое изобретение относится к области радиотехники и может быть использовано в системе радиолокации. Достигаемым техническим результатом является отказ от согласованного обзора пространства при отождествлении пеленгов. Указанный результат достигается за счет корреляционной обработки сигналов, принимаемых дополнительными слабонаправленными антеннами в каждом из пунктов приема либо одним из элементов используемых многоэлементных антенн. Сущность изобретения заключается в оценке положений максимумов взаимной корреляционной функции (ВКР) аддитивной смеси наблюдаемых сигналов по оси взаимного запаздывания, используемой при отборе координат истинных источников излучения. 2 н.п. ф-лы, 7 ил.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| Москва, Радио и связь, 1981 | |||
| RU 96116768 А, 10.11.1998 | |||
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| US 6421007 В1, 16.07.2002 | |||
| US 6163297 А, 19.12.2000 | |||
| WO 2006114426 A1, 02.11.2006. | |||

