Изобретение относится к области пассивной локации и может быть использовано для решения задач определения координат радиоизлучающих воздушных объектов (РВО) и траекторий их движения в пространстве при использовании базово-корреляционного метода, а также в научных исследованиях.
Для определения местоположения радиоизлучающих воздушных объектов в пространстве средствами пассивной локации используются триангуляционный способ, гиперболический способ и их комбинации, реализуемые в многопозиционных системах / Теоретические основы радиолокации. Под ред. профессора Я.Д. Ширмана. М.: Сов. Радио, 1970, стр.494…497/.
Триангуляционный (угломерный) способ мало зависит от видов и величины частотного спектра принимаемых радиотехнических сигналов. Главным достоинством этого способа является высокая энергетика его приемных каналов, так как для измерения угловых координат РВО используются два и более высокопотенциальных радиотехнических пеленгаторов (РТП) с достаточно большими коэффициентами усиления (более 20 дБ) антенн, обеспечивающие совместно с адаптивным приемным устройством высокую реальную чувствительность. Это позволяет обнаруживать и пеленговать практически все надгоризонтные РВО на больших (сотни километров) дальностях по их фоновому излучению.
Из изученных источников информации известны следующие технические решения.
/Например, патент РФ №2275649, МПК G01S 3/02, G01S 3/46, 2006/, «Способ определения местоположения источников радиоизлучения» /Патент РФ №2258941 МПК 7 G01S 5/04, 2004/, «Способ определения координат движущегося источника радиоизлучения с неизвестными параметрами и устройство для его осуществления» /Патент РФ №2234712, МПК 7 G01S 11/00, 2004/, «Метод триангуляции для определения позиций археологических объектов»/ Патент ФРГ №DE 102005030557 A1, 2007, Патент Кореи №KR 10-2010-0126979. 2010,
Приведенные выше источники в основном отличаются между собой используемыми методами проведения измерений угловой информации о цели как в части классических (например, наименьших квадратов, максимального правдоподобия и т.д.), так и не классических (нестатистического, инвариантно-группового, оптимизационного и т.д.).
Гиперболический (разностно-дальномерный) способ определения местоположения цели используется в многопозиционной системе, состоящей, в общем случае, из 3-х и более разнесенных на местности приемных пунктов (ПП). При этом один из приемных пунктов выполняет роль центрального приемного пункта (ЦПП).
Специфика этого способа такова, что в отличие от триангуляционного способа, этот способ требует выполнения условия «кооперативности приема», т.е. приема одного и того же сигнала, излученного источником радиоизлучения всеми ПП. Для выполнения этого условия ПП оснащаются, как правило, широкоугольными антеннами и имеющие, вследствие этого, низкий коэффициент усиления (не более 5,0…7,0 дБ). Получаемый суммарный энергопотенциал вполне достаточен для определения хронометрическим методом достаточно точных разностей хода принимаемых сигналов таких источников излучения как запросчики системы ближней радионавигации, ответчики системы опознавания и др., использующих простые коротко импульсные сигналы с крутыми фронтами и работающих на фиксированных частотах в 30-сантиметровом диапазоне волн и, что, не менее важно, источники их излучения имеют круговую диаграмму направленности. При этом дальность сопровождения таких РВО может достигать 300…400 км.
Вместе с тем большинство бортовых радиоэлектронных средств (РЭС) воздушных объектов в основном используют сложно фазомодулированные, частотно-модулированные, псевдослучайные последовательности и т.п., представляющие собой, как правило, длинно импульсные сигналы с неопределенно выраженными фронтами /Вопросы перспективной радиолокации. Коллективная монография. Под ред. А.В. Соколова. - М.: Радиотехника, 2003/. Для точного измерения разностей хода таких сложных сигналов между принимаемыми их ПП и ЦПП, необходимо использовать базово-корреляционный метод /Теоретические основы радиолокации. Под ред. профессора Я.Д. Ширмана. М.: Сов. Радио, 1970, стр.498…511/.
Использование базово-корреляционного метода предполагает в устройстве измерения разностей хода сигналов специальное переключаемое (перестраиваемое) устройство, компенсирующее разность запаздывания сигналов, с диапазоном задержек от О до частного, получаемого от деления двух базовых расстояний между ПП и ЦПП на скорость распространения электромагнитной волны в свободном пространстве.
К числу известных источников, в которых для определения местоположения ИРИ используется гиперболический способ, можно отнести следующие: «Способ определения местоположения и идентификации подвижных объектов и система для его осуществления» /Патент РФ №2013785, МПК 5 G01S 13/00, 1994/, «Разностно-дальномерный способ пеленгования источников радиоизлучения и реализующее его устройство» /Патент №2258242, МПК 7 G01S 3/46, 11/02, 2003/, «Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство».
Известно, например, техническое решение для определения источников радиоизлучения по патенту РФ №2013785 МПК 5 G01S 13/00, 1994, «Разностно-дальномерный способ пеленгования источников радиоизлучения и реализующее его устройство».
В патенте РФ №2013785 МПК 5 G01S 13/00, 1994, достаточно глубоко описывается разностно-дальномерный способ по определению местоположения ИРИ на основе дискретного преобразования двух сигналов и дальнейшего вычисления их взаимно-корреляционной функции в частотной области. Этот факт предопределяет универсальность использования предложенного в способе математического аппарата для вычисления разности хода как простых, так и сложно модулированных сигналов.
В качестве существенного недостатка разностно-дальномерных систем, использующих при вычислении разности хода сигнала базово-корреляционный метод, независимо во временной или в частотной областях это происходит, является низкая пропускная способность системы, обусловленная необходимостью проведения от нескольких тысяч до нескольких десятков тысяч операций поиска максимума взаимно-корреляционной функции по каждой паре сигналов (прямого и запаздывающего) при компенсации задержки с определенным шагом (шагом компенсации задержки), определяемым разрешающей способностью измерения разности хода сигнала (точностью измерения разности хода сигнала).
В качестве известной комбинации совместного использования угломерного (триангуляционного) и разностно-дальномерного (гиперболического) способов рассматривается так называемый угломерно-разностно-дальномерный или угломерно-гиперболический способ.
Наиболее близким по технической сущности заявляемому объекту изобретения является решение по патенту РФ №2275649 МПК 7 G01S 3/02 3/46. публ. 2005/ «Способ местоопределения источников радиоизлучения и пассивная радиолокационная станция, используемая при реализации этого способа».
Из патента РФ №2275649 известен способ местоопределения ИРИ при совместном использовании триангуляционного и разностно-дальномерного способов. Суть способа заключается в обнаружении и пеленгования ИРИ с использованием как минимум двух разнесенных в пространстве пассивных радиолокационных станций (ПРЛС) от центральной (опорной) ПРЛС и вычисления координат этих источников радиоизлучения в три этапа. На первом этапе на каждой ПРЛС производят поиск и обнаружение ИРИ, измеряют частотно-временные параметры их сигналов, на втором этапе не менее чем двумя ПРЛС осуществляют непрерывное сопровождение выбранного ИРИ и фиксируют время приема каждого импульса этого ИРИ, на третьем этапе по измеренным пеленгам и временам приема каждого импульса сопровождаемого ИРИ определяют в конечном счете его азимут и координаты местоположения на поверхности Земли.
Необходимо отметить, что, после решения проблемы определения координат РВО с заданной точностью, второй ключевой проблемой средств многопозиционной пассивной локации, использующих корреляционный метод определения времени запаздывания, является способность этих средств оперативно решать данную задачу, т.е. иметь заданную пропускную способность, особенно, являющейся актуальной, для работы по излучениям высоко динамичных бортовых РЭС воздушных объектов.
Недостатком известных технических решений является низкая пропускная способность, сравнимая с гиперболическим методом, использующим корреляционный способ определения разности хода сигналов (Патенты РФ №№2013785, 2258242, 2275649) и сложность реализации способа (Требуемое количество спектральных составляющих - патент РФ №2013785, три этапа для вычисления координат РВО - патент РФ №2275649).
Задачей изобретения является повышение пропускной способности многопозиционной системы пассивной локации, использующей угломерно-гиперболический способ по определению местоположения РВО, до уровня, сравнимого с многопозиционной системой пассивной локации, использующей триангуляционный способ.
Задача решается за счет того, что в известном способе определения координат воздушных объектов по излучениям их бортовых радиоэлектронных средств (БРЭС),, включающем обнаружение излучений, измерение пеленгов источников радиоизлучения и разностей хода сигналов с использованием как минимум двух периферийных радиотехнических пеленгаторов, выполняющих роль ПП, разнесенных в пространстве от центрального пеленгатора, выполняющего роль ЦПП, и последующее вычисление координат источников радиоизлучения угломерно-гиперболическим способом, определение местоположения РВО осуществляют в два этапа, на первом этапе на каждом ПП по согласованному с ЦПП направлению и частотному диапазону производят поиск и обнаружение РВО по излучениям их БРЭС, измеряют частотно-временные параметры излучаемых сигналов и пеленги их источников, проводят отождествление сигналов между собой, идентифицируют обнаруженные РВО, вычисляют координаты их местоположения триангуляционным способом, точность которых характеризуются так называемыми стробами положения в пространстве, с составляющими их размеров в декартовых или полярных координатах в виде их среднеквадратических ошибок, соответственно, - σx, σy, σz или σR - дальность, αβ - азимут, σε - угол места, затем, на втором этапе, с помощью гиперболического способа при количестве ПП более трех в полученном стробе уточняются координаты радиоизлучающего воздушного объекта (см. фиг.1).
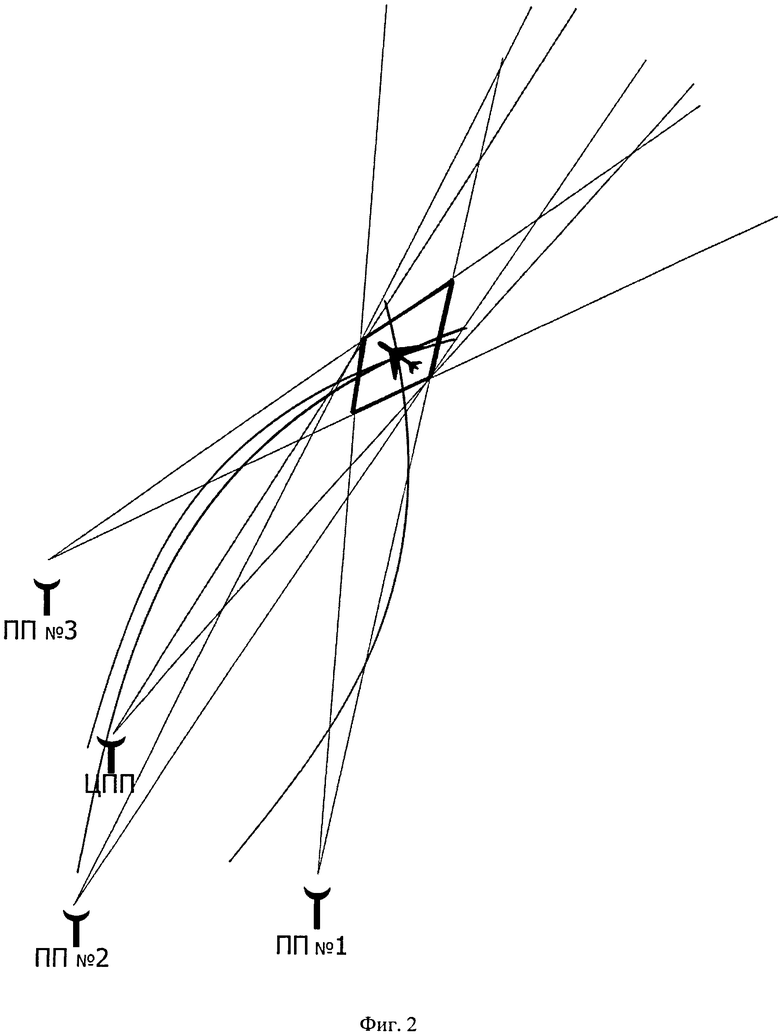
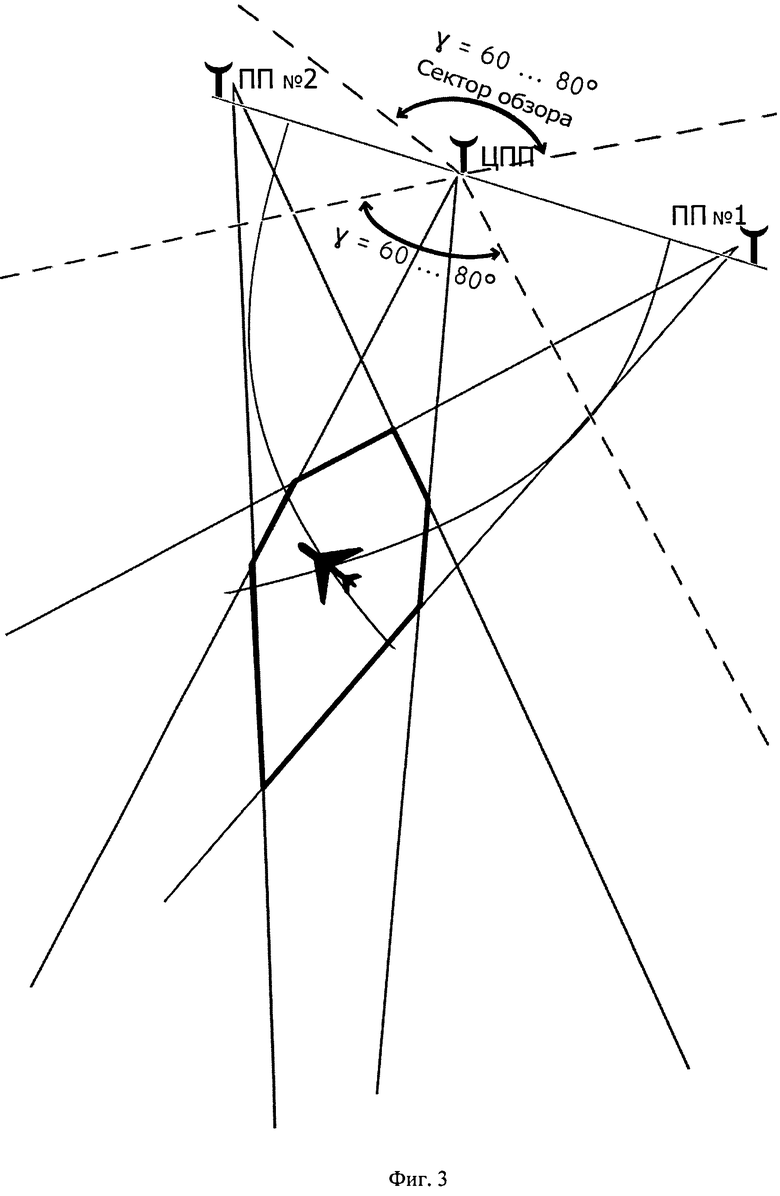
Вместе с тем при количестве РТП в комплексе менее четырех ПП (кроме ЦПП) для получения однозначного решения возникает задача преобразования превосходящего количества координат цели в количество, соответствующее количеству полученных линейных уравнений (см. фиг.2). При этом необходимо иметь в виду, что при составе комплекса пассивной локации (КПЛ) из 3-х РТП становится неэффективным круговой обзор пространства. Работу с приемлемыми точностями можно вести только в секторах, размером 60…80 град, при размещении их вершин в точке расположения ЦПП и расположенными по обе стороны дислокации КПЛ, представляющего в этом случае прямую линию с ЦПП в ее центре и разнесенными по обеим ее сторонам на величину измерительных баз периферийными ПП (см. фиг.3).
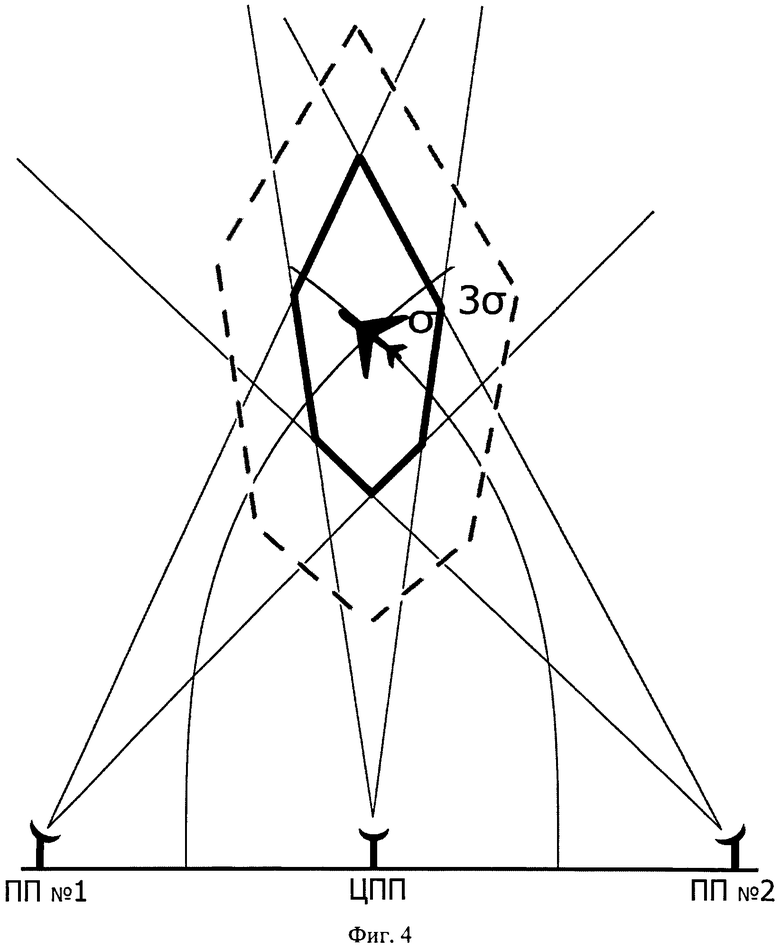
Получение однозначного решения с использованием полученных при решении триангуляционной задачи обобщенных от всех РПТ и приведенных к ЦПП значений азимута (β0) и угла места (ε0) цели. Использование значений азимута и угла места цели для решения задачи определения местоположения РВО осуществляется с учетом ограничения на продолжительность времени «старения» данных показателей. Предлагается определять интервал времени использования текущего значения азимута и угла места цели, полученных в триангуляционном способе, в последующем, на втором этапе - при работе гиперболического способа, пока они при своем «старении» не вышли за пределы величины ±(σ…3σ), в зависимости от характера решаемой задачи, где σ среднеквадратическая ошибка определения пеленга ЦПП-РВО (см. фиг.4).
Сопоставительный анализ заявленного решения с ближайшим аналогом показывает, что предложенный способ отличается от известного наличием новых условий и порядка их выполнения: получения строба пространственного положения РВО в результате проведения триангуляционных измерений и уточнения в нем положения этого объекта за счет использования или триангуляционно-разностно-дальномерного способа (при составе РТП в КПЛ от пяти и более) и - разностно-дальномерного способа (при составе РТП в КПЛ менее пяти). В связи с этим предложенный способ соответствует критерию изобретения «новизна».
Сущность изобретения заключается в определении на первом этапе области ошибок определения координат источника радиоизлучения триангуляционным (угломерным) способом, именуемого в дальнейшем стробом координат источника радиоизлучения, а затем, на втором этапе, с помощью разностно-дальномерного (гиперболического) способа в полученном стробе уточняются координаты источника радиоизлучения, в том числе при ограниченном количестве ПП (менее 4-х) в КПЛ с учетом «нестарых» значений азимута и угла места, полученных на первом этапе триангуляционным способом.
В предлагаемом способе в качестве излучающих объектов рассматриваются бортовые РЛС воздушных объектов, большинство которых используют сложно модулированные сигналы (ЛЧМ, ФКМ и им подобные). В отличие от простых импульсных коротких сигналов измерение времени запаздывания таких сигналов, как правило, осуществляется на основе определения взаимно-корреляционной функции (ВКФ), т.е. корреляционным методом. В устройствах, осуществляющих получение ВКФ, обязательным элементом является наличие перестраиваемой линии задержки с диапазоном задержек сигнала от 0 до частного от деления двух значений измерительных баз на скорость распространения электромагнитной волны в свободном пространстве. Поэтому одной из ключевых проблем средств многопозиционной пассивной локации, использующих взаимно-корреляционной функции для определения времени запаздывания, является способность «быстро» определить искомую задержку сравниваемых сигналов, количественным показателем которой является максимальное значение ВКФ в этой ситуации.
Сущность изобретения поясняется схемами определения координат, иллюстрирующие предлагаемый способ.
На фиг.1 представлен комплекс пассивной локации полного состава (РТП≥5) кругового обзора. В пространственной области - стробе местоположения РВО (на схеме - многоугольник), вычисленном триангуляционным способом на первом этапе, осуществляется уточнение положения РВО по точке пересечения гиперболоидов при использовании гиперболического способа на втором этапе (по сути тоже строб, но меньше в десятки раз). Для получения полного вектора положения цели в пространстве в декартовой системе координат и наклонной дальности (x, y, z и R) необходимо пересечение от 4-х и более гиперболоидов.
На фиг.2 представлен комплекс пассивной локации неполного состава (РТП≤4). В этом случае хотя и сохраняется круговой обзор, но получаемый вектор положения цели является неполным. Содержит только две декартовые координаты и наклонную дальность. Для получения 3-й координаты используются данные вектора по наклонной дальности или угломерного способа. В последнем случае точка местоположения цели в пространстве является точкой пересечения 3-х гиперболоидов и одной азимутальной плоскости.
На фиг.3 представлен комплекс пассивной локации минимального состава (РТП=3). В этом случае возможен только секторный обзор (два сектора по 60…80 град.). Получаемый вектор положения цели является также неполным. Содержит одну декартовую координату и наклонную дальность. Для получения 2-й и 3-й координат используются данные угломерного способа по азимуту и углу места цели. Точка местоположения цели в пространстве в этом случае является точкой пересечения 2-х гиперболоидов, одной азимутальной плоскости и конусной поверхности угла места цели.
На фиг.4 представлен комплекс пассивной локации минимального состава (РТП=3), иллюстрирующий зону «старения» данных, получаемых от вычисления строба триангуляционным способом, от σ до 3σ. Для реализации гиперболического способа определяют интервал времени, за которое он должен быть реализован. Этот интервал времени вычисляется как
Δτs=σ…3σ/VРВО,
где VРВО - модуль скорости полета цели.
Основой достижения технического эффекта является сохранение главного достоинства триангуляционного способа определения местоположения РВО - высокой пропускной способности системы пассивной локации по «обслуживанию» источников радиоизлучения в сочетании с высокой точностью определения местоположения всех или заданных источников радиоизлучения гиперболическим (триангуляционно-гиперболическим) методом. Формирование строба положения РВО потенциально обеспечивает резкое сокращение промежуточных вычислений по поиску искомой разности времени задержки сигнала между ЦПП и ПП.
Эффективность предлагаемого способа проверена моделированием в среде Mathcad-15 на примере:
а) Пропускная способность КПЛ, реализующего разностно-дальномерный способ пассивной локации определения местоположения РВО;
б) Пропускная способность КПЛ, реализующего предлагаемый способ 2-х этапного триангуляционно-гиперболического метода определения местоположения РВО.
В качестве исследуемого варианта комплекса пассивной локации рассматривался комплекс, состоящий из ЦПП и трех периферийных ПП, расположенных в азимутальной плоскости друг от друга через 120 град. и образующих тем самым правильную 3-х лучевую звезду (Фиг.2). При этом необходимо отметить, что в целях исключения дополнительных погрешностей при использовании разностно-дальномерного способа на дальностях существенно превышающих величину баз за счет выпрямления гипербол и совпадения их со своими асимптотами соотношение дальности до РВО и базовое расстояние ограничивалось в пределах до 10 раз. В связи с этим в ближней зоне на дальности до 100 км значение базы составляло 10 км, а в дальней зоне - до 400 км, соответственно, 40 км. В целях упрощения расчетов и их объема РВО рассматривался как надгоризонтный объект с постоянным значением угла места из ЦПП, равным 5 град. и независящим от дальности полета цели. Иными словами, полет РВО имитировался на некоторой наклонной плоскости.
Для проведения адекватных исследований достаточно было рассмотреть возможные положения РВО в какой-то одной четверти азимутальной плоскости. В качестве такой четверти выбрана I четверть. В качестве возможных положений РВО были приняты варианты углового положения излучающего объекта, охватывающие весь диапазон разностей хода сигналов, от 0 до двух базовых расстояний между ЦПП и каким-либо ПП. Таким образом, в проводимых исследованиях РВО располагались равномерно по диапазону азимутов от 0 до 90 град. на расстояниях 100 км (ближняя зона) и 400 км (дальняя зона).
Величина элемента разрешения как шаг компенсации задержки равнялась 10 не, что соответствовало ошибке в однократном первичном измерении разности хода сигнала - 3 м. Значение такой величины было выбрано в соответствии с реализованными устройствами-аналогами /ERA a.s. Prumyslová 387, 530 03 Pardubice, Gzech Republic, 2004, «Зарубежное военное обозрение», М.: Воениздат, 1995, №7, «Зарубежное военное обозрение», М.: Воениздат, 2001, №91.
При каждом текущем положении РВО:
- определялась разность хода сигналов между ЦПП и каждым ПП;
- в результате получения оценок координат положения триангуляционным способом определялись составляющие размера строба.
Для КПЛ, использующего разностно-дальномерный способ определения местоположения РВО (вариант «а»), обработку сигналов в корреляционных измерителях (по измерителю на каждой базе) необходимо проводить, перестраивая специальное устройство по шагам компенсации задержек, до тех пор, пока не будет получен глобальный максимум взаимно-корреляционной функции (ВКФ) на выходе коррелятора, в том числе с учетом проведения весовой обработки, если это необходимо в данной ситуации. Следовательно, частное, получаемое при моделировании от деления разности хода сигнала между ЦПП и каким-либо ПП на шаг компенсации задержки (элемент разрешения) перестраиваемого специального устройства компенсации разности хода сигналов, соответствует значению количества требуемых шагов компенсации задержек искомого специального устройства для получения требуемого результата (max ВКФ) на данной измерительной базе
В предлагаемом способе (вариант «б») уточнение местоположения РВО угломерно-разностно-дальномерным способом в стробе, сформированным триангуляционным способом, его составляющие, как было отмечено выше, определяются по правилу 3-х σ. При этом нижняя граница интервала времени задержек в стробе определяется при отрицательных значениях составляющих размеры строба (т.е. в декартовых координатах - это значения σx, σy, и σz РВО, а в полярных координатах σR, σβ и σε РВО), а верхняя - при положительных значениях. Таким образом, формируется в границах 3σ, составляющих триангуляционный строб, интервал времени задержек, внутри которого находится искомое значение задержки сигнала, обеспечивающее глобальный максимум ВКФ.
При моделировании было принято, что пеленгование РВО осуществляется моноимпульсным амплитудным методом, антеннами РТП. При этом в качестве РТП используются высокопотенциальные радиотехнические станции либо с механическим сканированием антенн по азимуту (Изделие 86В6А-СОП, разработчик ЗАО «НПП «Спец-Радио», г.Белгород, 2000), либо с электронным сканированием антенн по азимуту Изделие «Корсар», разработчик ЗАО «НПП «Спец-Радио», г.Белгород, 2011), обеспечивающие среднеквадратичные ошибки (СКО) первичных измерений угловых координат:
- 0,5 град. по азимуту;
- 1,0 град. по углу места.
Получение оценок пространственных координат, вычисляемых триангуляционным и гиперболическим способами, осуществлялось в соответствии с выше изложенными алгоритмами, а также /Научно-технический отчет о НИР «Проведение проектно-поисковых работ по обоснованию технического облика угломерно-гиперболического комплекса пассивной локации», Белгород, ЗАО НПП «Спец-Радио», 2007/.
В качестве примера, подтверждающего целесообразность использования 2-х этапного определения координат РВО, рассмотрим следующий.
В соответствии с приведенными исходными данными по составу, характеристикам КПЛ и РВО, а также алгоритмами расчета, получаем:
1-й этап измерений (триангуляционный метод) получение строба:
- на дальности 100 км - СКО дальности ≈9 км и СКО азимута ≈3 град,
- на дальности 400 км - СКО дальности ≈33 км и СКО азимута ≈0,3 град.
2-й этап измерений (гиперболический метод) уточнение положения в стробе:
- на дальности 100 км - СКО дальности ≈0,45 км и по азимуту ≈0,3 град;
- на дальности 400 км - по дальности ≈0,96/см и по азимуту ≈0,3 град.
Таким образом, в результате проведения вычислительного эксперимента с одной целью были получены следующие данные:
- для КПЛ варианта «а», использующего разностно-дальномерный способ определения местоположения РВО, число просматриваемых зон разрешения составило 13 с лишним миллиардов;
- КПЛ варианта «б» с предлагаемым триангуляционно-гиперболическим способом определения местоположения РВО число просматриваемых зон разрешения составило 35 миллионов.
Технический результат в КПЛ с предлагаемым триангуляционно-гиперболическим способом определения местоположения РВО составил 3,7 порядка по сравнению с КПЛ, использующего разностно-дальномерный способ определения местоположения РВО. Следовательно, доказано значительной повышение пропускной способности КПЛ с одновременным вычислением точных значений координат местоположения РВО (на уровне угломерно-гиперболического метода) при любом составе приемных пунктов в комплексе.
Таким образом, задача, стоящая перед изобретением, решена.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ЦЕЛИ В ДВУХПОЗИЦИОННОМ КОМПЛЕКСЕ ПАССИВНОЙ ЛОКАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗОНДИРУЮЩИХ СИГНАЛОВ ИОНОСФЕРНОЙ ЗАГОРИЗОНТНОЙ РЛС | 2020 |
|
RU2737279C1 |
| АДАПТИВНЫЙ СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2015 |
|
RU2593149C1 |
| Способ определения координат источников радиоизлучений и система для его реализации | 2019 |
|
RU2717828C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2022 |
|
RU2798923C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
Триангуляционно-гиперболический способ определения координат радиоизлучающих воздушных объектов (РВО) в пространстве относится к области пассивной локации и может быть использован для решения задач определения координат РВО и траекторий их движения в пространстве при использовании базово-корреляционного метода. Достигаемый технический результат - повышение пропускной способности многопозиционной системы пассивной локации. Способ заключается в измерении на всех приемных пунктах: на одном центральном и нескольких периферийных пунктах, угловых координат РВО и разностей дальности между центральным и периферийными приемными пунктами. Определение координат осуществляют в два этапа: на первом этапе определяют строб местоположения РВО, получаемого на основании угловых координат этого источника, измеренных центральным и всеми периферийными приемными пунктами (триангуляционный способ). На втором этапе в полученном стробе вычисляют разности дальностей между центральным и всеми периферийными приемными пунктами, определяют точное место нахождения РВО в пространстве. На каждом периферийном приемном пункте для измерения разности времени запаздывания сигнала по команде с центрального пункта устанавливают пеленг на РВО для выполнения условия приема одного и того же сигнала всеми приемными пунктами (использование гиперболического способа). 4 ил.
Триангуляционно-гиперболический способ определения координат радиоизлучающих воздушных объектов в пространстве, характеризующийся тем что на всех приемных пунктах: на одном центральном и нескольких периферийных пунктах, измеряют угловые координаты источника радиоизлучения и разности дальностей между центральным и периферийными приемными пунктами, определение координат осуществляют в два этапа: на первом этапе триангуляционным способом определяют строб местоположения источника радиоизлучения, получаемого на основании измеренных угловых координат этого источника центральным и всеми периферийными приемными пунктами, а на втором этапе, с использованием гиперболического способа, в полученном стробе вычисляют разности дальностей между центральным приемным пунктом и всеми периферийными приемными пунктами и определяют точное место нахождения источника радиоизлучения в пространстве, при этом на каждом периферийном приемном пункте для измерения разности времени запаздывания сигнала по команде с центрального пункта устанавливают пеленг на радиоизлучающий воздушный объект для выполнения условия приема одного и того же сигнала всеми приемными пунктами.
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2325666C2 |
| ТЕРКА ДЛЯ СВЕКЛЫ | 1933 |
|
SU38509A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2442184C1 |
| EP 342529 A, 23.11.1989 | |||
| JP 8201501 A, 09.08.1996 | |||
| US 4305077 A, 08.12.1981 | |||
| WO 2009101139 A1, 20.08.2009. | |||

