Изобретение относится к области пассивной радиолокации и может быть использовано для решения некоторых задач противовоздушной и противокосмической обороны страны, а также в научных исследованиях.
Известны способы определения координат движущихся источников излучения, основанные на приеме, выделении и обработке прямого излучения, например корреляционно-базовые. Недостатком таких способов является их сложность. /Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. Войска ПВО страны, 1968 г., стр. 394-399/.
Наиболее близким по технической сущности к предлагаемому способу является выбранный в качестве прототипа триангуляционный способ определения координат, основанный на приеме, выделении и обработке прямого излучения двумя и более приемными устройствами, расположенными в различных географических пунктах, разнесенных друг от друга на расстояние, называемое базой, нахождении угловых направлений на источник излучения в каждом пункте приема и расчете координат источника излучения по намеренным углам и известной базе разноса пунктов приема прямого излучения. /Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. Войска ПВО страны, 1968 г., стр. 391-392/. Этими координатами являются координаты точек пересечения пеленгов, взятых во всех пунктах приема. Триангуляционному способу присущи два основных недостатка: это обязательное наличие высококачественных каналов связи между приемными пунктами и вычислителем и, главное, наличие так называемых ложных точек пересечения пеленгов при числе источников излучения более одного. Отсеивание ложных точек пересечения - чрезвычайно трудная задача, особенно при большом количестве источников излучения.
Известны также устройства, применяемые для решения задач триангуляции, работающие по прямому /излученному/ сигналу. /Справочник по радиоэлектронным системам. Под ред. В.Х.Кривицкого. М.: Энергия, 1979 г., стр. 165-168/. Известен также так называемый радиопеленгатор, выбранный в качестве прототипа, принимающий прямой сигнал, определяющий азимут на источник излучения, содержащий последовательно соединенные антенну и приемное устройство, а также блок управления антенной. /Справочник по радиоэлектронным системам, под ред. Б.Х.Кривицкого. М.: Энергия, 1979 г., стр. 169-170/. Этот пеленгатор в момент минимума сигнала на выходе приемного устройства по угловому положению антенны определяет азимут источника излучения. Недостатком такого устройства является то, что, работая по прямому сигналу, оно в принципе может определять только одну координату - азимут, что вынуждает для определения дальности применять комплекс разнесенных на местности радиопеленгаторов.
Задачей изобретения является разработка способа определения координат подвижного источника радиоизлучения с неизвестными параметрами, не требующего разнесенных на местности радиопеленгаторов, избегающего тем самым решения задачи отсеивания ложных точек пеpeсения пеленгов, и обязательного применения высококачественных каналов связи между пеленгаторами и вычислителем, а также устройства для осуществления этого способа.
Техническим результатом решения задачи изобретения является способ и устройство определения координат движущегося источника излучения, позволяющие определить кроме азимута еще и дальность до движущегося источника излучения с неизвестными параметрами по результатам измерений параметров принимаемого сигнала только в одном географическом пункте приема.
Технический результат достигается тем, что в способе определения координат источника излучения, основанном на приеме, выделении и обработке прямого излучения двумя и более приемными устройствами /приемниками/, разнесенными на местности на расстояние, называемое базой, измерении угловых направлений на источник излучения в каждом географическом пункте приема прямого излучения и расчете координат источника излучения по найденным углам и известной базе разноса радиопеленгаторов, вместо определения углового направления на источник излучения во втором и остальных пунктах приема прямого излучения, только в одном географическом пункте приема производят последовательное измерение углового направления на источник излучения, а также производят последовательное намерение частоты принимаемого сигнала, выделенного приемным устройством основного пеленгационного канала, и приемным устройством дополнительного канала, при этом каждый приемник соединен со своей антенной, которые перемещаются относительно источника излучения с заданными, но различными радиальными скоростями, находят разность частот сигнала пеленгационного и дополнительного каналов, по найденной разности частот, измеренным значениям частот сигнала пеленгационного и дополнительного каналов, известным радиальным скоростям перемещения антенн, производят вычисление радиальной скорости источника излучения по одной из формул
Либо
из соотношений

рассчитывают угловое направление вектора линейной скорости /курсовой угол/ источника излучения в момент первого измерения азимута и частоты β к и γ к - угол поворота вектора линейной скорости из-за криволинейности траектории движения источника радиоизлучения за интервал времени между первым и вторым измерениями, по измеренным значениям азимута и рассчитанным значениям радиальной скорости источника излучения, курсового угла и угла поворота вектора линейной скорости перемещения источника излучения либо по формуле

либо по формуле

производят вычисление дальности до источника излучения в каждый момент измерения азимута и частоты, за исключением первого и второго моментов.
В этих формулах
Vr - радиальная скорость источника;
f1 - частота сигнала в основном пеленгационном канале;
Vra1 - радиальная скорость антенны пеленгационного канала;
Vra2 - радиальная скорость антенны дополнительного канала;
f2 - частота сигнала в дополнительном канале;
c - скорость света;
i - 3, 4, 5... - порядковый номер измерения,
α i - азимут источника в i-й момент измерения;
β к - угловое направление вектора линейной скорости движения источника излучения в начале к-го участка траектории,
к - 1, 2, 3... - порядковый номер участка траектории источника излучения, дальность до которого определяется в i-й момент,
γ к - угол поворота вектора линейной скорости из-за криволинейности траектории за время между первым и вторым измерениями азимута и частоты на к-том участке траектории;
ri - дальность до источника в i-й момент измерения азимута и частоты;
ti - время i-го измерения азимута и частоты.
Для реализации предлагаемого способа в радиопеленгатор, содержащий приемник, вход которого соединен с выходом антенны, антенну и блок управления антенной, составляющие пеленгационный канал, введен дополнительный канал, включающий в себя приемник, подвижную антенну, выход которой соединен со входом приемника дополнительного канала, перемещающуюся относительно источника излучения со скоростью Vra, блок управления антенной, перемещающий подвижную антенну по заданному закону, двухканальный измеритель частоты, первый вход которого соединен с выходом приемника пеленгационного канала, второй вход измерителя частоты соединен с выходом приемника дополнительного канала, вычислитель, информационные входы которого соединены с cooтветствующими выходами измерителя частоты и блоков управления антеннами, синхронизатор, управляющие выходы которого соединены с соответствующими входами блока управления антеннами, измерителя частоты и вычислителя.
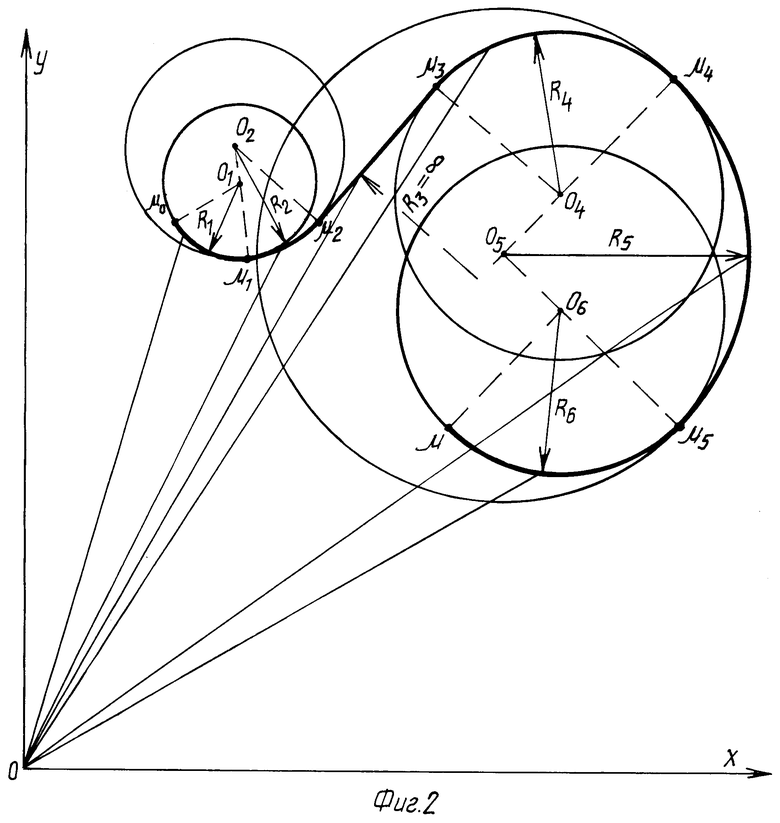
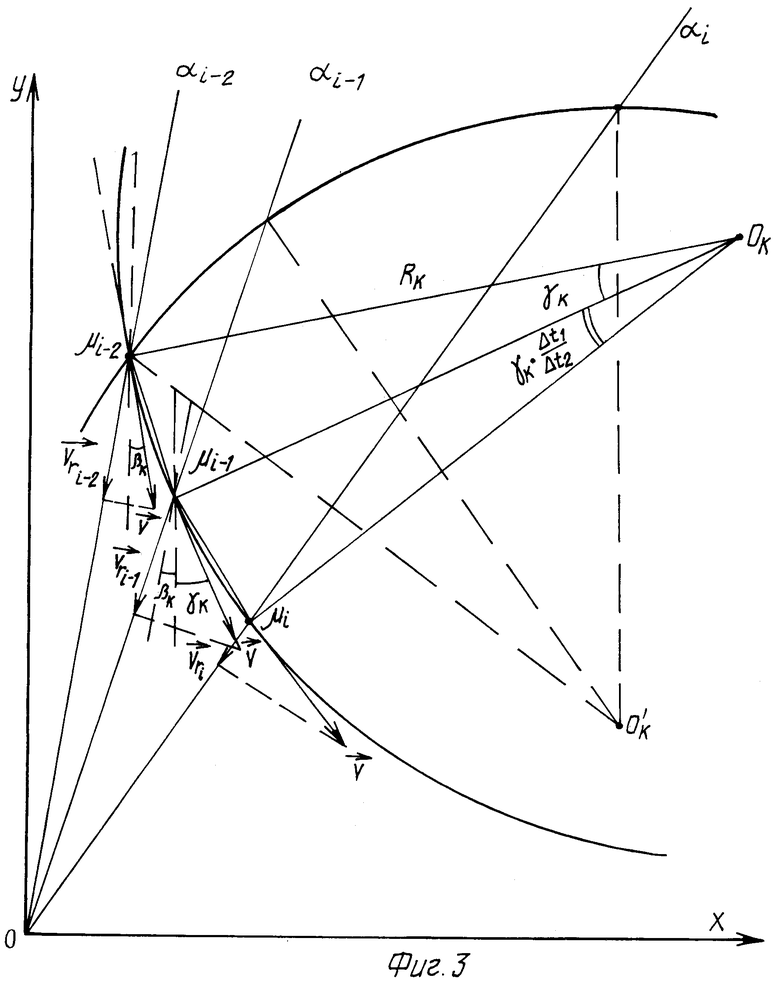
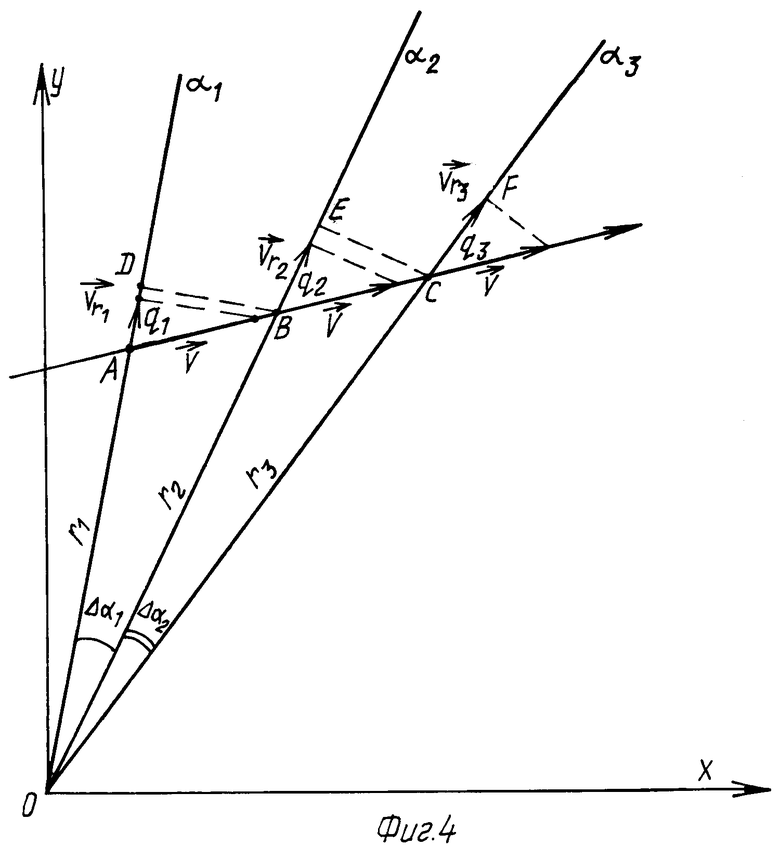
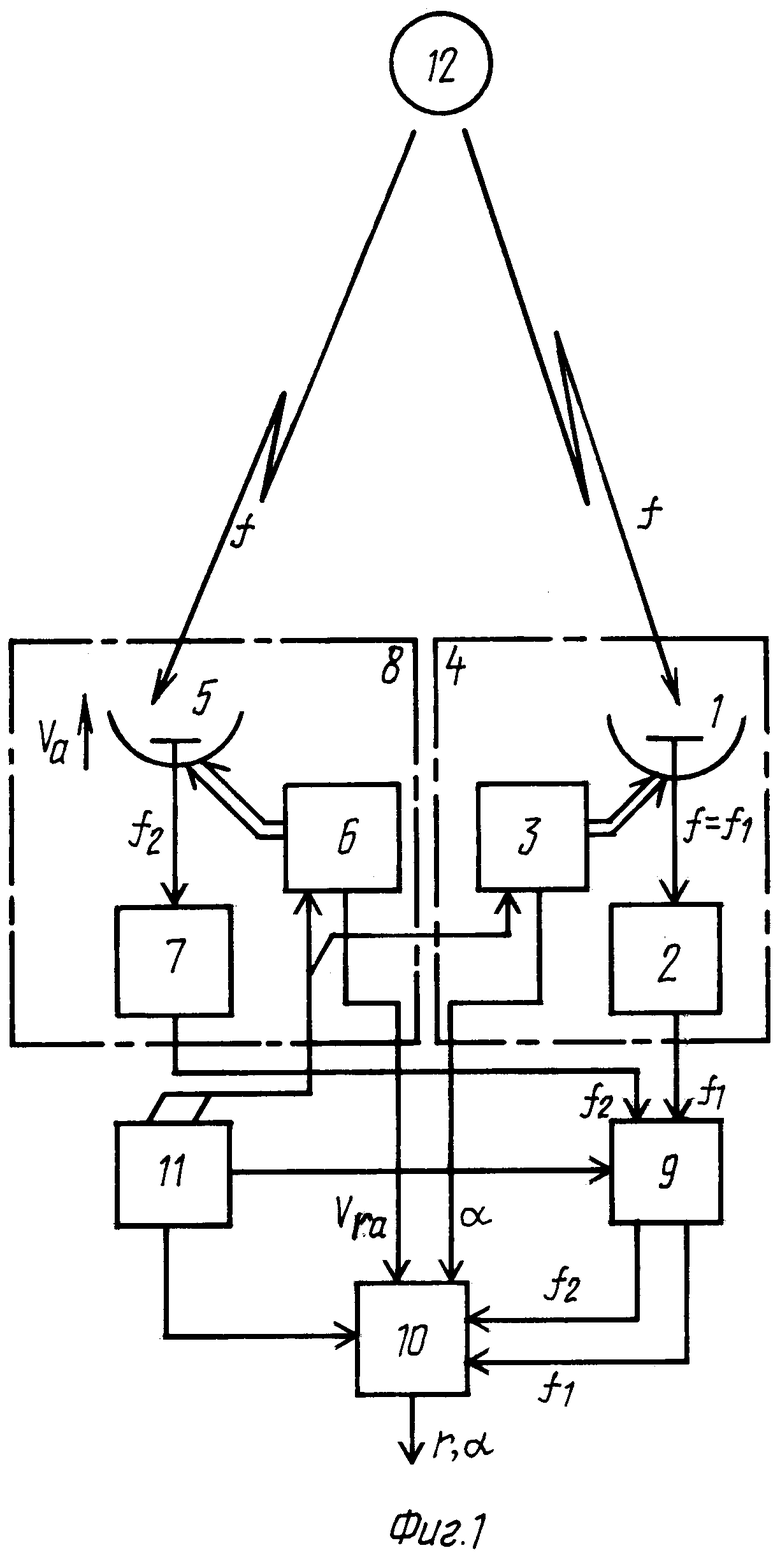
На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ определения координат, и условно показан подвижный источник излучения. На фиг.2 показана произвольная криволинейная траектория и ее аппроксимация отрезками окружностей различных радиусов. На фиг.3 показана геометрическая схема, объясняющая вывод формулы дальности до источника излучения при криволинейной траектории движения источника. На фиг.4 показана геометрическая схема, поясняющая вывод формулы дальности до источника излучения на прямолинейных участках траектории движения источника.
Устройство для определения координат движущегося источника излучения с неизвестными параметрами /фиг.1/ содержит антенну 1, приемник 2, блок управления антенной 3, образующие пеленгационный канал 4, подвижную антенну 5, управляемую блоком управления 6, приемник 7, образующие дополнительный канал 8, двухканальный измеритель частоты 9, вычислитель 10 и синхронизатор 11.
Принцип работы предлагаемого устройства заключается в следующем.
Нa вход антенны пеленгационного канала 4 поступают от источника, движущегося с радиальной скоростью V2, колебания частоты f. Одновременно эти же колебания поступают на вход антенны 5 дополнительного канала 8. Блок управления антенной 3 управляет движением /вращающимся или качающимся/ антенны 1 с целью определения азимута источника излучения, а блок управления антенной 6 управляет движением антенны 5 относительно источника излучения с радиальной скоростью Vra. С блока управления 3 информация об азимуте источника α , а с блока управления 6 информация о радиальной скорости антенны 5 Vra в цифровой форме поступает на соответствующие входы вычислителя 10.
С выхода антенны 1 на вход приемника пеленгационного канала поступает колебание частоты f=f1 / частота пеленгационного канала/. После выделения и усиления приемником 2 это колебание частоты f1 поступает на первый вход измерителя частоты 9 для определения значения частоты f1. С первого выхода измерителя частоты информация о значении частоты f1 в цифровой форме поступает на вычислитель 10. На вход антенны 5 поступает колебание той же частоты f, но с выхода антенны 5 на вход приемника 7 поступает колебание частоты f2=(f+Δ F)≠ f1, т.к. в значении частоты f2 есть составляющая доплеровского сдвига за счет радиальной скорости Vra антенны 5. После выделения и усиления приемником 7 колебания частоты f2 поступают на вход второго канала измерителя частоты. Информация о значении частоты f2 в цифровой форме с выхода второго канала измерителя частоты поступает на вычислитель 10. За счет дискретного съема информации на вычислитель в моменты времени t1 поступает от соответствующих блоков информация об азимуте источника излучения α (ti) частоте сигнала в пеленгационном канале f1(ti), частоте сигнала в дополнительном канале f2(ti) и информация о радиальной скорости дополнительной антенны Vra(ti). Вычислитель по этим данным сначала рассчитывает значение радиальной скорости перемещения источника излучения Vr(ti) ли6о по формуле
либо по формуле

где i - 1, 2, 3... - порядковый номер измерения азимута и частоты;
ti - время i-го измерения;
Vr(ti) - радиальная скорость источники излучения в i-й момент,
f1,2(ti) - измеренная частота сигнала в пеленгационном /дополнительном/ канале в i-й момент времени,
c - скорость света;
Vra(ti) - радиальная скорость дополнительной антенны в i-й момент.
При этом, если вектор  направлен в сторону источника излучения, то Vra больше нуля, а если
направлен в сторону источника излучения, то Vra больше нуля, а если  направлен от источника, то Vra меньше нуля. Затем вычислитель из соотношений
направлен от источника, то Vra меньше нуля. Затем вычислитель из соотношений
и

рассчитывает угловое направление вектора линейной скорости / курсовой угол/ в момент времени ti-2 β к и γ к - угол поворота вектора линейной скорости из-за криволинейности траектории движения источника радиоизлучения за интервал времени ti-1-ti-2. После этого вычислитель по вышеуказанным формулам для ri рассчитывает дальность до источника излучения в любой момент измерения, за исключением первого и второго измерения. Начиная с третьего измерения, т.е. с третьего съема информации с вычислителя будет поступать информация не только об азимуте, но и о дальности до источника излучения. Синхронизация всех процессов по вычислению и съему информации осуществляется управляющими импульсами синхронизатора 11.
Справедливость формул расчета Vr(ti) защищена авторским свидетельством СССР на изобретение №776265, МКл G 01 S 11/00. Справедливость формул расчета ri доказывается следующим образом. Пусть в плоскости ХОУ, с началом координат в точке наблюдения движется точечное тело М с некоторой линейной скоростью V. Траектория этого движения описывается неизвестной функцией y=f(x). На практике интересен случай, когда точечное тело имитирует движение созданного человеком летательного аппарата. В этом случае можно утверждать, что вектор линейной скорости  ни по модулю, ни по направлению мгновенно измениться не может. Это означает, что функция y=f(x), описывающая траекторию, - гладкая и непрерывная, а линейная скорость лежит в пределах от Vmin до Vmax. При этих условиях можно найти интервал времени Δ t, в течение которого можно считать
ни по модулю, ни по направлению мгновенно измениться не может. Это означает, что функция y=f(x), описывающая траекторию, - гладкая и непрерывная, а линейная скорость лежит в пределах от Vmin до Vmax. При этих условиях можно найти интервал времени Δ t, в течение которого можно считать  а изменение направления - плавное. На фиг.2 показана произвольная криволинейная траектория точечного тела М. Как известно, любую гладкую, непрерывную кривую можно аппроксимировать набором отрезков окружностей различных радиусов. На фиг.2 показана аппроксимация кривой М0М дугами М0М1 радиуса R1, М1М2 радиуса R2, m2m3 радиуса R3=∞ , М3М4 радиуса R4, М4М5 - радиуса R5 и M5M радиуса R6. Поэтому задача определения дальности от точки наблюдения до точки, лежащей на кривой ММ, по сути дела сводится к задаче определения дальности до точки, движущейся по окружности. Для этого необходимо всю кривую M0М разбить на n участков и решать задачу нахождения дальности для каждого участка, считая, что на каждом к-том участке точка М движется по окружности радиуса Rк с постоянной линейной скоростью Vк.
а изменение направления - плавное. На фиг.2 показана произвольная криволинейная траектория точечного тела М. Как известно, любую гладкую, непрерывную кривую можно аппроксимировать набором отрезков окружностей различных радиусов. На фиг.2 показана аппроксимация кривой М0М дугами М0М1 радиуса R1, М1М2 радиуса R2, m2m3 радиуса R3=∞ , М3М4 радиуса R4, М4М5 - радиуса R5 и M5M радиуса R6. Поэтому задача определения дальности от точки наблюдения до точки, лежащей на кривой ММ, по сути дела сводится к задаче определения дальности до точки, движущейся по окружности. Для этого необходимо всю кривую M0М разбить на n участков и решать задачу нахождения дальности для каждого участка, считая, что на каждом к-том участке точка М движется по окружности радиуса Rк с постоянной линейной скоростью Vк.
Допустим, что в любой момент времени мы можем измерить радиальную составляющую линейной скорости Vr и азимут α на точку М. На фиг.3 показано движение точки М на к-ом участке траектории. Точка Мi-2 - начало к-го участка, точка Мi - конец этого участка.
Пусть в момент времени ti-2 зафиксировали радиальную скорость Vri-2 и азимут α i-2. По одному измерению восстановить траекторию, т.е. найти дальность ri-2 не возможно, т.к. точка М может находиться в любом месте на азимутальной линии α i-2 и при этом зафиксируется пара Vri-2, α i-2. Пусть в момент времени ti-1 зафиксировали радиальную скорость Vri-1 и азимут α i-1. По двум измерениям можно восстановить траекторию, т.е. определить дальность ri-1, только в том случае, если траектория - прямая линия. Т.к. не известно, какая на самом деле траектория - прямолинейная или криволинейная, то необходимо третье измерение радиальной скорости и азимута в момент времени ti. Тогда по набору Vri-2, α i-2, Vri-1, α i-1, Vriα i можно восстановить траекторию вида окружности радиуса Rk с центром в точке Ok, при движении по которой со скоростью Vk может образоваться вышеуказанной набор радиальных скоростей и азимутов. Любая другая окружность даст другой набор, что так же показано на фиг.3.
Для решения задачи определения расстояния от точки наблюдения до точки М введем понятие курсового угла β k в первый момент измерения радиальной скорости и азимута на к-том участке траектории. Курсовой угол - это угол между осью ОУ и вектором линейной скорости  Угол β k отсчитывается от оси ОУ и положительный при отсчете против часовой стрелки. Обозначим через γ k угол поворота радиуса Rk за время между первым и вторым измерениями. Угол γ k - это по сути дела угол поворота вектора линейной скорости
Угол β k отсчитывается от оси ОУ и положительный при отсчете против часовой стрелки. Обозначим через γ k угол поворота радиуса Rk за время между первым и вторым измерениями. Угол γ k - это по сути дела угол поворота вектора линейной скорости  за счет движения по кривой. При прямолинейном движении γ k равен нулю.
за счет движения по кривой. При прямолинейном движении γ k равен нулю.
При первом измерении мы не знаем значения линейной скорости, но можем утверждать, что оно лежит в интервале от Vmin=Vr1 до некоторой Vmax·Vmin=Vr1 будет в том случае, когда α 1+β k=0.
Тогда

Эта значит, что минимальное значение β k равно - α 1. Максимальное значение угла β k может быть найдено из условия:

т.е. 
следовательно,
таким образом,
По определению /см. фиг.3/:



В этих формулах и далее для упрощения написания принято i=3, k=1. Возьмем отношение радиальных скоростей Vr2 и Vr1 и, учитывая, что на к-том участке скорость Vk=const, уравнение радиальной скорости Vr3


Из соотношений /1/ и /2/ находим значениям β 1 и γ 1, удовлетворяющие измеренным значениям Vr1, α 1, Vr2, α 2, Vr3, α 3.
Примечание. Автор сознательно не приводит методику нахождения β 1 и γ 1, т.к. не являясь специалистом в области программирования, не уверен, что проще то ли запрограммировать решение системы тригонометрических уравнений, то ли вычисление значений β 1 и γ 1 по формулам, полученным в результате классического решения системы тригонометрических уравнений /1/ и /2/. Эти формулы очень громоздки. Автор склонен к методу последовательного приближения.
После определения курсового угла β 1 и угла поворота вектора линейной скорости γ 1 можно вычислить значение дальности r3. Действительно, линейная скорость

Дуга

Но дуга

поэтому

Хорда
Угол

Но

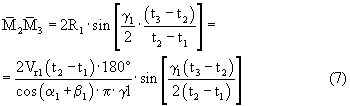
тогда

Из треугольника ОM2М3 имеем

откуда

После измерения в момент времени ti+1=t4 азимута α 4 и радиальной скорости Vr4 по этому же алгоритму производим расчет для участка к+1, используя набор Vr2α 2; Vr3α 3; Vr4α 4. При этом оказывается, что участок к+1 сдвинут относительно участка номер к на угол γ k, поэтому подбор β k+1 и γ k+1 можно начинать с β k+1=β k+γ k. Если при этом окажется, что Vr4расч больше Vr4изм, то необходимо β k+1 увеличивать до тех пор, пока Vr4расч не станет равной Vr4изм.
Если при нахождении β k и γ k окажется, γ k=0, это значит, что на этом участке траектория оказалась прямолинейной /изменения вектора линейной скорости по направлению нет/ и расчет соответствующей дальности необходимо проводить по методике для прямолинейной траектории. В этом случае /см. фиг.4/:


где q - угол между линией азимута и вектором линейной скорости,
Δ α - изменение азимута на время между двумя соседними измерениями радиальной скорости и азимута.
Для упрощения примем i=2. Так как V=const, то

Решая равенство /1/ относительно угла q1, а равенство /2/ относительно угла q2, находим
В формулах 3 и 4 qi - это курсовые углы источника излучения в моменты измерения азимута и радиальной скорости, отсчитываемые от направления пеленгации по часовой стрелке, Δ α - разность азимутов за время между двумя измерениями, причем Δ α >0 при изменении азимута по часовой стрелке и Δ α <0 при изменении пеленга против часовой стрелки.
С учетам определяющих формул для радиальной скорости и курсовых углов линейная скорость на прямолинейном участке траектории может быть найдена по формулам:
Рассмотрим изображенные на фиг.4 треугольники ОДВ и АДВ. Оба треугольника прямоугольные, поэтому из треугольника АДВ имеем

Но АВ - это путь, пройденный источником излучения за время Δ t, т.е.
Тогда

учитывая /3/

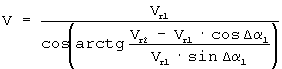
В то же время из прямоугольнике ОДВ имеем

Не ОВ - это дальность от точки наблюдения до движущегося источника радиоизлучения в момент второго измерения азимута и радиальной скорости. Поэтому

откуда

В самом общем случае

Из всего сказанного становится ясно, что делая последовательные измерения радиальной скорости и азимута, можно, начиная с третьего измерения, определить дальность до движущегося источника радиоизлучения практически в реальном режиме времени с запаздыванием, равном машинному времени решения задачи, с помощью ЭВМ. Алгоритм при этом следующий. Берется текущий набор измерений радиальной скорости и азимута Vri и α i два набора предыдущих /Vri-1, α i-1, Vri-2, α i-2/. По этим данным из соотношений:

определяются угловое направление вектора линейкой скорости /курсовой угол/ в момент времени ti-2, β k и γ k - угол поворота вектора линейной скорости из-за криволинейности траектории за интервал времени ti-1-ti-2. Если γ k окажется равным нулю, то по формуле:

а при γ k≠0, то по формуле
определяется дальность до движущегося источника излучения в текущий момент времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта и радиолокационная система для реализации этого способа | 2016 |
|
RU2617830C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ПЕРЕМЕЩЕНИЯ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2211460C2 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2003 |
|
RU2258242C2 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
Изобретение относится к области пассивной радиолокации. Предлагается способ определения координат движущегося источника радиоизлучения и устройство для его реализации, основанные на последовательном ряде измерений угловой координаты движущегося источника излучения, измерении частоты излучения, принятого двумя приемниками, антенны которых движутся относительно источника с известными, но различными радиальными скоростями, расчете по результатам измерений радиальной скорости источника излучения в каждый момент измерения, а начиная с третьего измерения, и дальности до источника излучения. Достигаемым техническим результатом является то, что предлагаемый способ, обладая преимуществами пассивной локации, позволяет избежать решения чрезвычайно сложной задачи, возникающей при использовании триангуляционного способа определения координат при большом количестве источников излучения - отсеивание ложных точек пересечения пеленгов. 2 н.п. ф-лы, 4 ил.
или
где Vr - радиальная скорость источника радиоизлучения в момент измерения частоты и азимута;
f1 - частота сигнала прямого излучения, принятого приемником пеленгационного канала;
f2 - частота сигнала того же источника радиоизлучения принятого приемником дополнительного канала;
Vra - заданная радиальная скорость движения подвижной антенны;
С - скорость света, равная 299793000 м/с,
в каждый момент измерения азимута и частоты вычисляют значение радиальной скорости перемещения источника радиоизлучения, по текущему набору значений азимута α1 и радиальной скорости перемещения источника радиоизлучения Vri и двум предыдущим наборам из соотношений
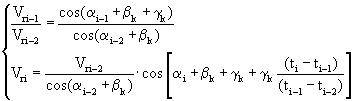
определяют угловое направление вектора линейной скорости источника радиоизлучения в первый момент измерения азимута и частоты βk и угол поворота вектора линейной скорости перемещения источника излучения за время между первым и вторым измерениями азимута и частоты γk, при угле поворота вектора линейной скорости γk, равном нулю по формуле

а при угле поворота вектора линейной скорости γk не равном нулю по формуле
где ri - дальность до источника излучения в i-й момент измерения азимута и частоты;
i - 3, 4, 5... порядковый номер измерения;
Vri - радиальная скорость перемещения источника радиоизлучения в i-й момент времени;
αi - азимут источника радиоизлучения в i-й момент времени;
ti - время i-го измерения частоты и азимута;
k=1, 2, 3... - порядковый номер участка траектории источника радиоизлучения, дальность до которого определяется в данный момент;
βk - угловое направление вектора линейной скорости движения источника радиоизлучения в начале k-го участка траектории;
γk - угол поворота вектора линейной скорости за время между первым и вторым измерениями азимута и частоты на k-м участке траектории,
вычисляют дальность до источника радиоизлучения в каждый момент измерения азимута и частоты, за исключением первого и второго моментов.
| Справочник по радиоэлектронным системам./Под ред | |||
| Б.Х | |||
| КРИВИЦКОГО | |||
| - М.: Энергия, 1979, с.169 и 170 | |||
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1995 |
|
RU2104486C1 |
| US 4613867 А, 23.09.1986 | |||
| Устройство для разделения проволоки | 1982 |
|
SU1087236A1 |
| DE 3802235, 03.08.1989. | |||

